
Use of the Sinusoidal Predictor Method within a Fully Separated
Modeler/Solver Framework for Fast and Flexible EMT Simulations
Pierre-Marie Gibert
1
, Romain Losseau
1
, Adrien Guironnet
1
, Patrick Panciatici
1
,
Damien Tromeur-Dervout
2
and Jocelyne Erhel
3
1
System Expertise Department, RTE, Versailles, France
2
Institut Camille Jordan, University Claude Bernard Lyon 1, Lyon, France
3
Fluminance Team, Inria Rennes, Rennes, France
Keywords:
Electromagnetic Transients, Time-domain Simulations, Adaptive Step Size Algorithm.
Abstract:
In order to help the introduction of renewable energy sources into the power system, transmission system
operators need extremely reliable simulation tools. In most of the existing simulation tools, heuristics used to
accelerate the simulations combine the modeling and solving aspects. Such kinds of approaches lead to results
whose validity can be questioned. In contrary, our framework aims at avoiding such heuristics by completely
separating the modeler and the solver. However, such an approach is difficult as the computational cost may
be significantly higher. In addition, as we simulate the full-waveform of AC power systems, the time step
size used by classical methods for integrating the arising systems of DAE is limited by the frequency of some
electrical components. This is why we developed an efficient solver based on the reference solver SUNDIALS
IDA which takes into account the guessed sinusoidal behavior of the solution oscillating parts in order to
lower the number of iterations for performing a simulation. Our first results seem to indicate that the proposed
solver enables to use much larger time steps than a standard integration scheme, while preserving a very high
flexibility of modeling.
1 INTRODUCTION
Modern power systems are characterized by the de-
velopment of smart-grids and the increasing propor-
tion of renewable energy sources in the energy mix.
Therefore, more and more new smart controls and po-
wer electronics devices are introduced into the trans-
mission grid. In order to support this technological
changes while providing a constant security of sup-
ply to their customers, transmission system opera-
tors (TSOs) perform numerous time-domain simula-
tions. Time-domain simulations generally consist in
studying the dynamical behavior of the power system
when it is subject to scenarios, which can be roughly
seen as sequences of discrete events associated with
perturbations and parades.
However, these simulations require important
computational resources because of the stiffness of
the differential algebraic equations (DAE) systems
that arise when modeling power systems in the time-
domain. Indeed, on the one hand, modern com-
ponents introduce electromagnetic transients (EMT)
phenomena, whose typical time range varies from
the microsecond to a few milliseconds. On the ot-
her hand, historically present electrical components
such as synchronous machines lead to electromecha-
nical transients, whose typical time range varies from
the millisecond to the minute. In addition, electro-
mechanical components can be dramatically affected
by electromagnetic phenomena (e.g. magnetic satura-
tion of the coils in synchronous machines). Then, the
study of these two kinds of phenomena can be less
and less separated.
Historically, as the time and space propagation
of EMT through the transmission grid was assumed
to be very limited, simulations were done only on a
small part of the system and during very short time
intervals. This resulted to the use of different mo-
dels and so of different simulation tools depending
of the dynamics to study. The simulation of electro-
magnetic transient phenomena was based on so-called
EMT models. And the simulation of electromechani-
cal transient phenomena was done from so-called TS
(for Transient Stability) models. On the contrary, as
34
Gibert, P-M., Losseau, R., Guironnet, A., Panciatici, P., Tromeur-Dervout, D. and Erhel, J.
Use of the Sinusoidal Predictor Method within a Fully Separated Modeler/Solver Framework for Fast and Flexible EMT Simulations.
DOI: 10.5220/0006860400340043
In Proceedings of 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2018), pages 34-43
ISBN: 978-989-758-323-0
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

EMT models are more detailed and so contain TS mo-
dels in some ways, our objective is to perform mid-to-
long-term simulations of large-scale power systems
with full-EMT models.
In addition, in most of the existing simulation
tools, the modeling and solving aspects are generally
combined. Indeed, components are directly imple-
mented in discretized form: trapezoidal formula for
smooth dynamics and backward Euler formula for
discontinuities. Although it enables faster computati-
ons, such an approach leads to an increasing number
of heuristics in models and consequently to simulati-
ons whose reliability can be questioned. To finish, the
DAE systems are generally solved with fixed step size
integration schemes. Therefore, in order to meet some
accuracy requirements, the time step is fixed to very
small values (e.g. 10 µs), which completely prevents
from long-term simulations.
For performing reliable long-term time-domain si-
mulations of power systems represented with EMT
models, our strategy is based on two cornerstones:
1. Completely separating the modeler and the sol-
ver. From a mathematical point of view, the idea
is that the modeler should only build the DAE sy-
stem to solve, which is written in implicit form
i.e. F(t, X,
˙
X) = 0. Then, the solver should per-
form the numerical integration of this system.
2. Integrating the DAE with an adaptive step size
solver. By this way, the time step size is adjus-
ted in order to meet a tolerance target, which fi-
nally reinforces the reliability of the simulation re-
sults. Furthermore, the step size adjustment ena-
bles to possibly optimize the computational cost.
Indeed, as the step size is directly linked to the
dynamics of the solution (the faster its variations,
the smaller the step size), it enables to catch fast
transient phenomena when the system is subject
to perturbations while reducing the computational
cost when the system returns to steady-state.
However, in EMT simulations, using an adaptive
step size strategy is generally inefficient because of
the sinusoidal behavior of the simulated three-phase
voltages and currents. Indeed, their frequency limits
the time step size that is used for the integration. To
tackle this constraint, most of the existing approaches
consist in rewriting the DAE system in order to lower
the frequency of the computed solution. For instance,
in Dynamic Phasors (Demiray, 2008)-(Demiray et al.,
2007) the oscillating components are represented by
their envelope instead of their waveform. Then, as the
frequency of the resulting variables is close to zero,
much larger time steps can be used. However, as this
approach directly affects the model by modifying the
equations to solve in a non strictly equivalent way, it
is not adapted to our framework.
Hence, the method that we implemented takes
into account the sinusoidal behavior of the oscillating
components in the solver. Basically, the idea is to de-
compose the solution as the sum of a periodic part
and a correction term. The former is updated using
parametric estimation. The latter is integrated using
an adaptive step size solver. In previous publicati-
ons, results were obtained with Scilab (Scilab et al.,
2012), a Matlab-like language, which is not suited to
large-scale tests. In this paper, we present the first
results obtained with the implementation of our met-
hod into the reference solver SUNDIALS IDA (Hind-
marsh et al., 2005). In order to set our simulations,
we used Dynamo (Guironnet et al., 2018), which is a
simulation engine based on the OpenModelica (Fritz-
son et al., 2006) environment and developed by RTE
for time-domain simulations.
This paper is structured as follows. In the second
section, the mathematical problem to solve when con-
sidering EMT simulations is introduced. In the third
section, our numerical method is presented. In parti-
cular, we detail its implementation into the reference
solver IDA and its interface with Dynamo. In the
fourth section, some numerical results on two power
systems are presented. The fifth section concludes
this paper.
2 MATHEMATICAL PROBLEM
TO SOLVE
In EMT simulations, the mathematical problem to
solve is a set of differential-algebraic equations,
which can be written in its most general form as
F(t, X(t),
˙
X(t)) = 0 (1)
Let d be the dimension of the system. In this equa-
tion t ∈ R, X : R → R
d
and F : R × R
d
× R
d
→ R
d
.
In this paper, we present our method for such impli-
cit DAEs. Our previous paper (Gibert et al., 2018)
focuses on semi-explicit DAEs, as DAE systems can
generally be rewritten in such form for most of the
power system applications (Astic et al., 1994).
Furthermore, the solution of this system X is as-
sumed to contain both oscillating (for instance, the
three-phase currents and voltages) and non-oscillating
components, i.e.
X(t) =
X
s
(t)
X
ns
(t)
(2)
where X
s
and X
ns
respectively refer to the oscillating
components and to the non-oscillating components.
Use of the Sinusoidal Predictor Method within a Fully Separated Modeler/Solver Framework for Fast and Flexible EMT Simulations
35

Let d
s
(respectively d
ns
= d − d
s
) be the number of
oscillating (respectively non-oscillating) components
and I
s
(respectively I
ns
) the associated set of index.
These index sets are known a priori (e.g. network
voltages and currents).
The idea of the Sinusoidal Predictor Method
(SPM) is to take advantage of the behavior of the os-
cillating components in steady-state. Indeed, AC po-
wer systems are designed such as voltages and cur-
rents are as close as possible to balanced three-phase
quantities oscillating at the reference frequency (for
instance 50 Hz for the Continental Europe). In other
words, its means that three-phase systems should ve-
rify:
X
s,∞
(t) ≈
A
∞
cos(ω
0
t + φ
∞
)
A
∞
cos(ω
0
t + φ
∞
−
2π
3
)
A
∞
cos(ω
0
t + φ
∞
+
2π
3
)
(3)
Where A
∞
and φ
∞
are respectively constant ampli-
tude and phase. In addition, non-oscillating compo-
nents should be constant by definition, which means
that
˙
X
ns,∞
≈ 0. Then, in steady-state, the DAE system
should verify
F
t,
X
s,∞
(t)
X
ns,∞
,
˙
X
s,∞
(t)
0
= 0 (4)
Therefore, the SPM, presented in (Gibert et al.,
2017) and (Gibert et al., 2018), consists in decompo-
sing the solution for each time interval [t
n
, t
n+1
] as the
sum of a periodic part and a correction term, i.e.
X(t) =
¯
X
n
(t) + δ(t) (5)
In this equation,
¯
X
n
(t) refers to the periodic part of
the solution which corresponds to the guessed steady-
state behavior of the oscillating components. Then, as
mentioned in (3), these variables should be sinusoid
oscillating at the reference frequency i.e.
¯
X
s,n
(t) = u
n
sin(ω
0
t) + v
n
cos(ω
0
t) (6)
where ω
0
= 2π f
0
is the nominal pulsation (with f
0
=
50Hz e.g.). Hence, u
n
and v
n
are the Fourier coef-
ficients associated to the fundamental mode f
0
. The
objective of the SPM is to catch as much as possi-
ble the simple sinusoidal behavior of the solution into
this periodic part. Indeed, as the power system is de-
signed to generate balanced three-phase signals, the
oscillating components of the solution should be si-
nusoids with constant amplitude and phase in steady-
state. So, the f
0
oscillation finally corresponds to a
trivial dynamical component of the solution which is
paradoxically the main limit to solver performances
since it constrains the usable step size. The Fourier
coefficients are updated with a parametric estimator
which takes advantage of the property (4).
Therefore the other part of the solution, that we
refer as the correction term, enables to catch transient
parts of the solution that are mainly introduced by dis-
crete events. For instance, it can be envelope vari-
ations (as the Fourier coefficients are set to constant
values for each time interval) or more complex dyn-
amics such as harmonics and offsets. This correction
term is computed by integrating the equations rewrit-
ten on it.
Then, an iteration of the SPM simply consists in
(see figure 1):
1. fixing the parameters of the periodic part;
2. integrating the equations rewritten on the cor-
rection term;
3. deducing the global solution from the current pe-
riodic part and the integrated correction term;
4. updating the periodic part, by estimating its para-
meters.
1 – Time step
initialization
2 – Correction
term
integration
3 – Global
solution
update
4 - Fourier
coefficients
estimation
!
"#$
% &
"
% &
"'(
% )
"
!
"'(
% &
"'(
% *
"'(
+
"'(
,-
"'(
% .
"'(
)
Figure 1: Overall view of an SPM iteration.
3 PROPOSED SOLVER: IDASPM
3.1 Existing Reference Solver: IDA
IDA is the implicit differential algebraic equations
solver from the SUNDIALS library (Hindmarsh et al.,
2005), developed and still maintained by Lawrence
Livermore National Laboratory. It is a modern ver-
sion of the solver DASSL (Petzold et al., 1982),
which is an industrially validated implementation of
the adaptive step size BDF (Brayton et al., 1972). The
adaptive step size BDF of order q consists in substi-
tuting the time derivative of the solution by the follo-
wing approximation:
˙
X
n+1
≈
1
h
n
q
∑
i=0
α
n,i
X
n+1−i
(7)
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
36

where h
n
= t
n+1
−t
n
. Then, by injecting this discreti-
zation of
˙
X
n+1
into (1), the solution at next time step
t
n+1
can be obtained by solving the following fixed-
point problem:
G(X
n+1
) = F
t
n+1
, X
n+1
,
α
n,0
h
n
X
n+1
+ β
n
(8)
where β
n
=
1
h
n
∑
q
i=1
α
n,i
X
n+1−i
corresponds to the
predicted part of the time derivative of X
n+1
. Then,
the Jacobian of this residual function is given by
J
G
(X
n+1
) =
∂F
∂X
+
α
n,0
h
n
∂F
∂
˙
X
(9)
More details on the theoretical aspects of IDA can
be found in (Hindmarsh et al., 2005). From an imple-
mentation point of view, one of the greatest features
of IDA is its wide variety of linear solvers for solving
the linear systems that arise in Newton-Raphson ite-
rations. In particular, it contains an implementation
of the KLU solver for sparse matrices, which is parti-
cularly suited for power systems applications (CRSA
et al., 2011).
Then, the architecture of IDA roughly consists in:
• a generic differential algebraic equations solver,
which corresponds to the implementation of the
BDF with variable step size and order. So, this
general module performs the prediction, the cor-
rection and the step size and order adjustment.
In our case, the maximum order is fixed to 2.
More precisely, in the correction step, it executes
the Newton-Raphson iterations by calling virtual
functions for building and solving the linear sy-
stem: initialization, setup and solve.
• Specific modules for the different linear solvers.
For instance, in direct solvers, the linear system
setup evaluates the Jacobian matrix and performs
the factorization. Then, the solve function applies
the numerical factorization of the matrix on the
input right-hand-side vectors. In particular, the
Jacobian matrix storage is different depending on
the linear solver. For instance, a Compressed-
Sparse-Row storage is used for the KLU solver.
3.2 Theoretical Aspects of IDASPM
In this section, the SPM is presented for its imple-
mentation into IDA, i.e. when using the adaptive
step size Backward-Differentiation-Formula as basic
integration scheme. However, the SPM can be im-
plemented in any numerical solver. For instance,
in (Gibert et al., 2018), the integration of the SPM
into the mixed Trapezoidal Formula - Backward-
Differentiation-Formula (Astic et al., 1994) is presen-
ted.
So, as mentioned in section 2, the first step of the
SPM consists in fixing the Fourier coefficients u
n
and
v
n
for the time interval [t
n
, t
n+1
]. Then, we can de-
fine Φ
n
: R × R
d
× R
d
→ R
d
, the local DAE function
associated to the equations on δ:
Φ
n
(t, δ,
˙
δ) = F(t,
¯
X
n
(t) + δ,
˙
¯
X
n
(t) +
˙
δ) (10)
As for the classical BDF, the fixed-point problem
on δ
n+1
is obtained by applying the BDF discretiza-
tion formula (7) to approximate
˙
δ
n+1
:
˙
δ
n+1
≈
1
h
n
q
∑
i=0
α
n,i
δ
n+1−i
(11)
In this equation, δ
n+1−i
= X
n+1−i
−
¯
X
n
(t
n+1−i
). In-
deed, the DAE function associated to the correction
term is locally defined as it depends on the Fourier
coefficients u
n
and v
n
. Hence, at the beginning of each
time step, the history of δ is updated for taking into
account the new values of the Fourier coefficients. By
this way, the consistency of δ is ensured with Φ
n
.
By applying this integration scheme on the dif-
ferential algebraic equation (10), we get an implicit
problem similar to (8) that can be solved with a fixed-
point algorithm:
Γ
n
(δ
n+1
)
= Φ
n
t
n+1
, δ
n+1
,
α
n,0
h
n
δ
n+1
+ β
δ
n
= F
t
n+1
,
¯
X
n
(t
n+1
) + δ
n+1
,
˙
¯
X
n
(t
n+1
) +
α
n,0
h
n
δ
n+1
+ β
δ
n
(12)
Whose Jacobian matrix is actually equal to the Ja-
cobian matrix of the original system:
J
Γ
n
(δ
n+1
) =
∂F
∂X
+
α
n,0
h
n
∂F
∂
˙
X
(13)
Once δ
n+1
is computed, the global solution X
n+1
is directly obtained from (5):
X
n+1
=
¯
X
n
(t
n+1
) + δ
n+1
(14)
Then the parameters of the periodic part of the so-
lution can be updated. In our current implementation,
this update is done using a predictive parametric esti-
mator. Hence, our estimation process consists in ap-
plying an iteration of the modified Newton algorithm
for minimizing a measurement of the stationarity of
the system. Indeed, as shown in (4), in steady-state:
• The oscillating components of the solution should
be centered sinusoids with constant Fourier coef-
ficients oscillating at the reference frequency of
the system.
• The non-oscillating components of the solution
should be constant and so their time-derivative
should be equal to zero.
Use of the Sinusoidal Predictor Method within a Fully Separated Modeler/Solver Framework for Fast and Flexible EMT Simulations
37

So, our objective is to minimize the energy
function associated to (4):
R(u
n+1
, v
n+1
) =
Z
t
n+1
+T
t
n+1
F
t,
¯
X
s,n+1
(t)
X
ns,n+1
,
˙
¯
X
s,n+1
(t)
0
2
dt
(15)
In this equation, R : R
2d
s
→ R. This estimator is
presented in more details in (Gibert et al., 2018). Ho-
wever, it is important to recall that it leads to the reso-
lution of the following linear system:
H
uu
n+1
H
uv
n+1
H
vu
n+1
H
vv
n+1
∆
u
n+1
∆
v
n+1
= −
g
u
n+1
g
v
n+1
(16)
where the sub-matrices H
uu
n+1
, H
uv
n+1
, H
vu
n+1
, H
vv
n+1
∈
R
d
s
×d
s
correspond to an approximation of the compo-
nents of the Hessian matrix of (15) and the right-hand-
side vector composed of g
u
n+1
, g
v
n+1
∈ R
d
s
corresponds
to its gradient. Hence, these components require the
evaluation of the DAE system residual function and
Jacobian matrix, i.e. F and J
F
. Once this linear sy-
stem is solved, the new Fourier coefficients are simply
given by u
n+1
= u
n
+ ∆
u
n+1
and v
n+1
= v
n
+ ∆
v
n+1
.
3.3 Practical Considerations of
IDASPM
Then, in order to implement the SPM into IDA, mo-
difications have been made at the two architecture le-
vels of IDA: at the general algorithm level and at the
matrix-specific level.
To begin, we added a member to the main data
structure IDAMem, which contains the solver data.
This member is a generic pointer to a SPM-specific
data structure containing all the data needed for the
SPM. More precisely, it contains the boolean vec-
tor distinguishing the oscillating and non-oscillating
components of the solution, the vector of Fourier
coefficients and the reference pulsation of the system.
Furthermore, it contains integration and estimation
work-space data. To initialize this data-structure, the
user only has to properly set the above-mentioned
boolean vector and pulsation. Then, the method au-
tomatically performs the DAE system reformulation,
the decomposition of the solution, the correction term
integration and the Fourier coefficients update.
Hence, in the general IDA algorithm, our modifi-
cations enable to integrate the DAE system rewritten
on the correction term. So, first of all, the Fourier
coefficients are fixed and the continuity condition is
applied for making the history of δ consistent with
Φ
n
. Then, the predictor on δ is built from these his-
tory data and applied at time t
n+1
for computing the
prediction
ˆ
δ
n+1
. The full solution prediction
ˆ
X
n+1
is
deduced by adding
¯
X
n
(t
n+1
). Once this prediction is
known, the DAE residual function is evaluated for
the Newton iterations of the correction step. Finally,
when the correction step is complete, the error test
on δ is performed and the step size is updated conse-
quently.
In a SPM specific module, the estimator is imple-
mented. As the estimator uses the Jacobian matrix
of the DAE system, its implementation depends on
the matrix storage format. Since the KLU is mainly
used for power systems applications, our current im-
plementation is done for CSR matrix storage. In a
first implementation, the Jacobian matrix was updated
within the estimator function but it resulted in a very
important computational time by iteration. So, in our
current implementation, the Jacobian matrix used in
the estimator is updated only when IDA updates its
Jacobian matrix. By this way, the number of Jacobian
matrix evaluations is dramatically reduced while pre-
serving a good level of approximation. Indeed IDA
performs several robust numerical tests to infer on the
validity of the Jacobian matrix.
The figure 2 summarizes the modifications made
to the IDA algorithm for using the SPM.
3.4 Interface with Our Customized
Framework based on Modelica
OpenModelica (Fritzson et al., 2006) is an open-
source suite based on Modelica language (Fritzson
and Engelson, 1998), which is used for the modeling
and simulation of complex systems. It is an object-
oriented, formal and non-causal language for wri-
ting models in an equation-based style. Furthermore,
OpenModelica contains a compiler which enables to
generate simulation files, that are compatible with
IDA, from a Modelica model file. In particular, Mo-
delica enables to clearly separate the modeling and
solving aspects. The European projects PEGASE
(Chieh et al., 2011) and then iTesla (Vanfretti et al.,
2016) have introduced and proved the industrial po-
tential of Modelica for time-domain simulations of
transmission grids. Furthermore, the latter resulted in
the development of the iPSL library, which is open-
source and still maintained. Then, the dynamical-
study tools team of RTE implemented Dynamo, a new
simulation engine (Guironnet et al., 2018) which is
based on this framework. It especially enables to ea-
sily connect models with solvers to perform simulati-
ons in a very flexible way.
Hence, in our framework, Modelica is used for the
modeling part of the simulation. Then, our objective
is to implement the model of the simulated system
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
38

Prediction: !
"
#$%
Correction residual evaluation &'!
"
#$%
(
Fourier coefficients update :
')
#$%
* +,
#$%
(
Fourier coefficients loading : ')
#
* +,
#
(
+ Continuity Condition: -
#./
Time step acceptability loop
Correction Jacobian evaluation
0
&
'!
"
#$%
( + KLU factorization
Newton iterations loop
Newton linear system solving
Correction application : !
#$%
and !
1
#$%
Correction residual re-evaluation
&'!
#$%
(
Newton convergence test
Error test on !
#$%
Step size update
Prediction: -
2
#$%
+ Deduction of !
"
#$%
+ 3
4
5 and 3
4
1
5 evaluation
(for the estimator)
Correction application: -
#$%
and -
1
#$%
+ Deduction of !
#$%
and !
1
#$%
Error test on -
#$%
Figure 2: Modification of the general algorithm of IDA
for integrating the SPM: the left part corresponds to the
standard IDA algorithm and the right part details the SPM-
specific operations.
with the Modelica language and, then, to perform the
simulation with IDASPM from Dynamo. To summa-
rize, in OpenModelica-type frameworks the simula-
tion process consists in three main steps:
1. The user implements a model from existing or
user-defined libraries. A model generally consists
in assembling unit models within a global model
from their physical connections.
2. The model compiler, e.g. OpenModelica Compi-
ler, interprets this model to construct the associ-
ated DAE system to be solved. So, it constructs
a ”flat model” by injecting all the mathematical
equations associated to the different unit com-
ponents and connections. In output of this pro-
cess, OpenModelica Compiler generates several
source files corresponding to the simulation: re-
sidual function of the DAE system, parameters,
initial values, etc.
3. To finish, as we have the files containing the
DAE system at our disposal, it can be integrated
using the chosen solver, e.g. SUNDIALS IDA.
To do this, our simulation engine contains generic
modules which automatically initialize the solver
data structures and data, and perform the simula-
tion from the chosen solver library.
Therefore, in order to interface our solver with
Dynamo, we have to generate the solver library cor-
responding to IDASPM and then to implement a cu-
stomized solver module which properly initializes
the data structures of IDASPM. In particular, it sup-
plies to IDASPM the pulsation of the system and the
boolean vector distinguishing the oscillating and non-
oscillating variables from a configuration file. In the
current version of our implementation, this file is ma-
nually completed by the user and provided at execu-
tion time, which could be automatically done from
the modeler in a future version. Then, from these
data, IDASPM can be used for the simulation. Our
implementation does not require the initial Fourier
coefficients to be set during the initialization. They
are computed directly during the simulation. This is
why performances are generally lower during the first
time steps, even if the system is in steady-state. In-
deed some iterations are required for the Fourier coef-
ficients to converge and consequently for the step size
to increase.
4 RESULTS AND DISCUSSION
4.1 Results on a Small Power System
First of all, our implementation has been tested on
a small three-phase power system with 4 nodes (see
figure 3). It contains 3 perfect generators, 1 resis-
tive load and connections with transmission lines mo-
deled with RL branches. In our framework, this mo-
del results in a system of 188 equations including
15 differential equations. Then, this system is sub-
ject to an exponential increase of the electrical load
at time t
event
= 1s. Our results have been obtained
from a Fedora Virtual Machine (launched from Vir-
tualBox) running with 2 processors (CPU: Intel i5-
5257U @2.7GHz, cache=3MB) and 4GB of RAM.
The figure 4 shows that the solution obtained with
IDASPM perfectly fits with those obtained with IDA.
Then, in the figure 5, the step sizes used by IDA and
IDASPM are compared. Then, we can see that the
SPM globally enables to integrate the DAE with much
larger time steps. As expected, the step size used with
Use of the Sinusoidal Predictor Method within a Fully Separated Modeler/Solver Framework for Fast and Flexible EMT Simulations
39
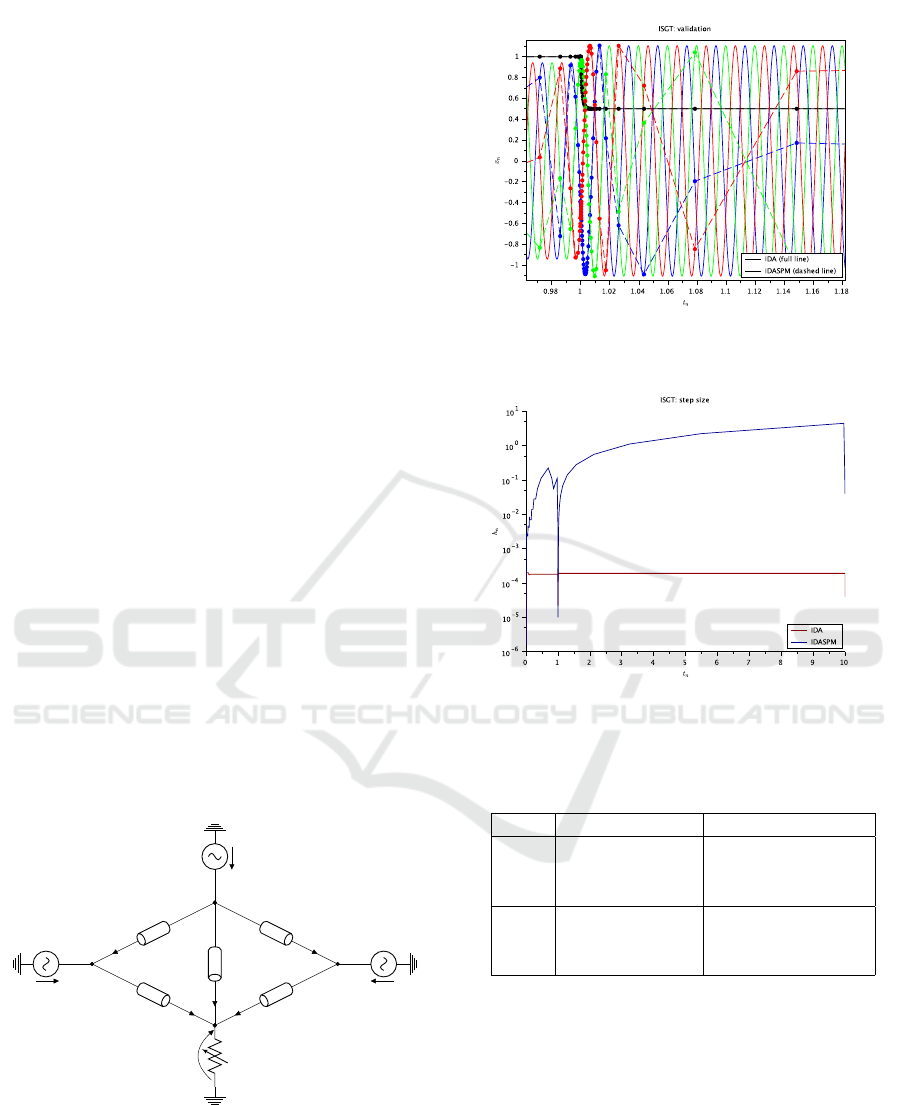
the SPM reaches high values when the system is in
steady-state. Hence, one can identify three time inter-
vals:
1. From the beginning of the simulation to the event,
the step size increases regularly. At the very be-
ginning, the SPM uses small time steps as the
Fourier coefficients are initialized to zero. Then,
some iterations are required for them to converge.
2. During the load variation, the step size remains
at very low values. As the estimator is designed
from the assumption that the system is in steady-
state, this step size limitation is logical.
3. When the system returns to steady-state, the step
size increases again and reaches high values.
Hence, IDASPM requires 157 time steps and 0.64
seconds to perform the simulation. IDA requires
52115 time steps and 2.69 seconds to perform the si-
mulation. Their performances are summarized in ta-
ble 1. So, using the SPM enables to dramatically re-
duce the number of iterations for performing this si-
mulation (divided by more than 300). The speedup
is also significant (divided by 4). However, we can
see that it is not as important as for the number of ite-
rations. Indeed, the SPM requires to perform more
mathematical operations whose computational cost is
not negligible than a classical integration method. In
particular, as our current implementation is not com-
pletely optimized, the computational cost of the esti-
mator remains important. This cost is mainly due to
the use of the Jacobian matrix of the DAE system and
the different linear algebra operations that are done
during the estimation process. This is why the final
computational time by iteration is currently high.
V
1
V
2
V
3
R
c
V
4
I
12
I
13
I
14
I
24
I
34
Figure 3: Simple Electrical Grid test case (figure from (Gi-
bert et al., 2018)).
Figure 4: Comparison of the solutions obtained with IDA
(full line) and IDASPM (dashed line) on the Simple Elec-
trical Grid test case (tolerance = 1.e-4).
Figure 5: Comparison on the step size used by IDA (red
line) and IDASPM (blue line) on the Simple Electrical Grid
test case with tol=1.e-4.
Table 1: Performances comparison between IDA and
IDASPM on the SEG test case.
tol Method SEG
IDA 52115 it. (2.69 s)
1.e-4 IDASPM 157 it. (0.64 s)
IDA/IDASPM 332 (4.20)
IDA 112035 it. (6.65 s)
1.e-5 IDASPM 290 it. (0.76 s)
IDA/IDASPM 386 (8.75)
4.2 Results on a Customized Version of
the IEEE 14-bus Reference Test
Case
Then, our implementation has been tested on a larger
power system with 14 nodes (see figure 6), inspired
on the reference test case IEEE-14 bus. Its contains
5 perfect generators, 11 resistive loads, connections
with transmission lines modeled with RL branches
and ideal transformers. In our framework, this mo-
del results in a system of 754 equations including 51
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
40
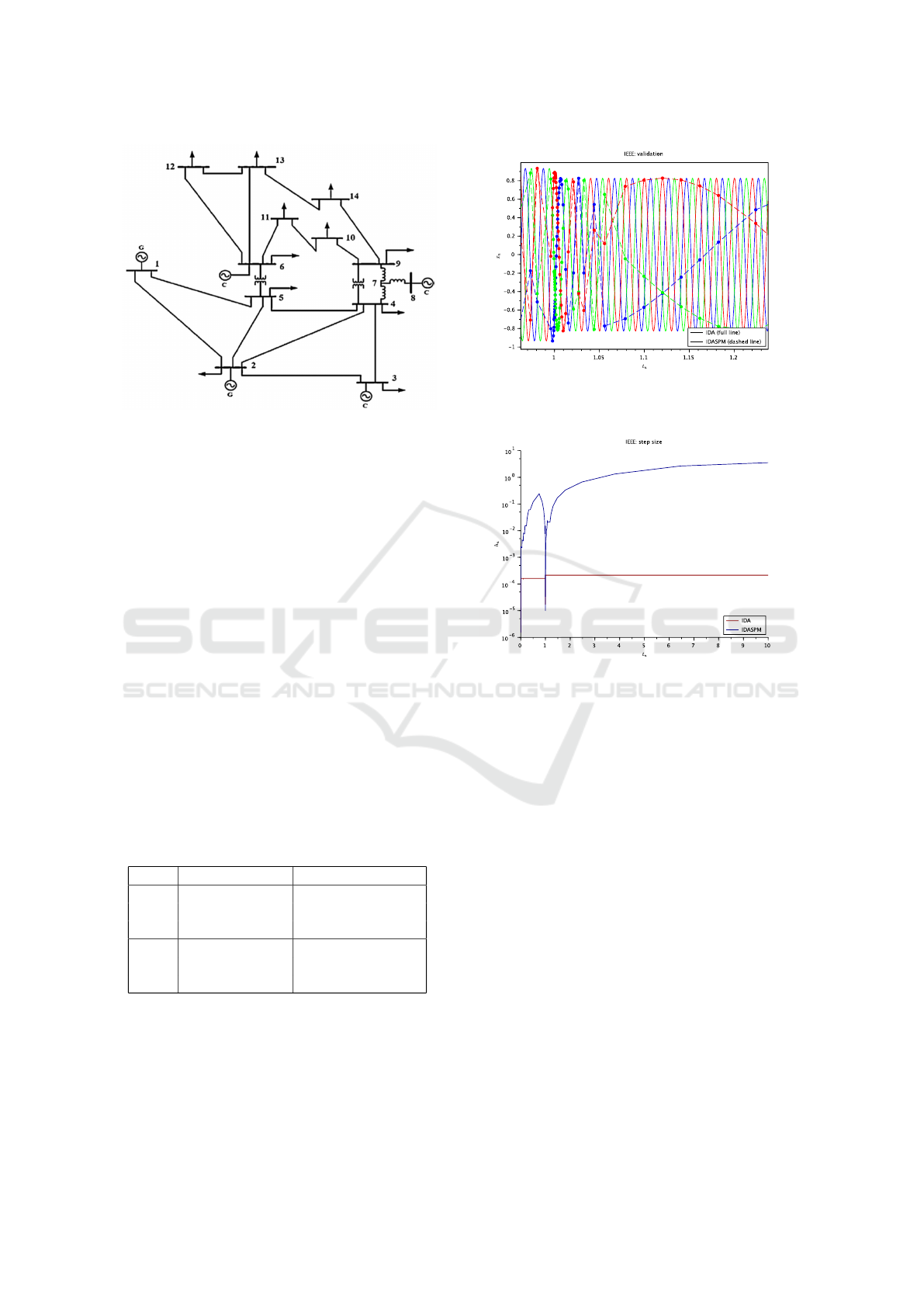
Figure 6: IEEE 14-bus test case (figure from (Abbas Taher
et al., 2015)).
differential equations. Then, this system is subject to
an exponential increase of the electrical load attached
to Bus 4 at time t
event
= 1s.
The figure 7 shows that the solution obtained with
IDASPM perfectly fits with those obtained with IDA.
In figure 8, the step sizes used by IDA and IDASPM
are compared. Results are very similar to those obtai-
ned on the Simple Electrical Grid test case. Indeed,
IDASPM requires 174 time steps and 11.66 seconds
to perform the simulation. IDA requires 48504 time
steps and 3.21 seconds to perform the simulation.
Their performances are summarized in table 2. Then,
as for the Simple Electrical Grid test case, the num-
ber of time steps is very significantly reduced by using
the SPM. However, as the computational cost by ite-
ration is still too important in our current version of
IDASPM, there is finally no speedup. Further deve-
lopments will focus on optimizing the Fourier coeffi-
cients estimator, which represents the large majority
of the computational time.
Table 2: Performances comparison between IDA and
IDASPM on the IEEE 14-bus inspired test case.
tol Method IEEE-14
IDA 48504 it. (3.21 s)
1.e-4 IDASPM 174 it. (11.66 s)
IDA/IDASPM 279 (0.28)
IDA 116705 it. (7.90 s)
1.e-5 IDASPM 306 it. (13.24 s)
IDA/IDASPM 381 (0.60)
4.3 Discussion and Area for
Improvement of IDASPM
In conclusion, in spite of the large reduction of num-
ber of iterations for performing time-domain simula-
tions, the final speedup with our current implementa-
Figure 7: Comparison of the solutions obtained with IDA
(full line) and IDASPM (dashed line) on the IEEE 14-bus
inspired test case (tolerance = 1.e-4).
Figure 8: Comparison on the step size used by IDA (red
line) and IDASPM (blue line) on the IEEE 14-bus inspired
test case (tolerance = 1.e-4).
tion of IDASPM is low for some test cases. For in-
stance, on the IEEE 14-bus inspired test case, using
IDASPM leads to a greater computational time while
the number of iterations is divided by a factor close
to 300. On the contrary, on the SEG test case, the
speedup is significant but still could be enhanced.
If we consider the computational time by iteration,
we can see that it is
• for SEG, 4.1ms/it. with tol.=1.e-4 and 2.6ms/it.
with tol.=1.e-5;
• for IEEE, 67ms/it. with tol.=1.e-4 and 43ms/it.
with tol.=1.e-5.
In other words, the computational time by itera-
tion is about 16 times greater between SEG and IEEE,
i.e. the dimension increase factor squared. So, we can
see that our implementation is currently very sensitive
to the problem dimension. One can note that the com-
putational time is lower when reducing the tolerance
on average. This is due to the IDA management of
Jacobian updates. Indeed, while the number of ite-
rations is almost twice when passing from tol=1.e-4
Use of the Sinusoidal Predictor Method within a Fully Separated Modeler/Solver Framework for Fast and Flexible EMT Simulations
41

to tol=1.e-5, there are only 2 additional Jacobian up-
dates. Then, we used KCacheGrind (Weidendorfer,
2008) to profile the performances of our implemen-
tation. Two functions cover the large majority of the
solving process:
1. The linear solver setup function, which performs
the Jacobian evaluation and factorization. The se-
tup function represents 24.64% of the global com-
putational cost. In particular, the relative cost
of the Jacobian evaluation is 23.02%, i.e. about
93.43% of the setup.
2. The Fourier coefficient update function represents
75.29% of the global computational cost. In parti-
cular the relative cost of the matrix factorization,
that is done for solving the linear system of the
estimator (16), is 67.20%, i.e. 89.25% of the esti-
mator cost.
Therefore, these first investigations make several
optimization ideas evident:
• In IDA, the Jacobian matrix of the DAE system is
given by the formula (9) i.e. J
F
= ∂
X
F + c
j
∂
˙
X
F.
Then, as our Fourier coefficients estimator requi-
res the two partial derivatives of F, ∂
X
F and ∂
˙
X
F,
the current implementation of IDASPM calls the
Jacobian matrix evaluation function three times:
once for evaluating the solver full Jacobian which
is used for the integration process (with the c
j
coefficient of the integrator) and twice for eva-
luating the two partial derivatives (with c
j
= 0
for the X partial derivative and with c
j
= −1 for
preparing the
˙
X partial derivative extraction). In
addition, each Jacobian matrix evaluation calls a
modeler-level function which computes the Jaco-
bian matrix by performing an automatic differen-
tiation of the residual function. To finish, once the
Jacobian matrix evaluations have been done for
the estimator, some matrix operations are requi-
red for extracting the
˙
X partial derivative. So, our
first optimization idea consists in modifying the
IDASPM Jacobian evaluation function for filling
the three different Jacobian matrix in a single call.
Indeed, in the modeler-level code, the two partial
derivatives are evaluated and then added. By this
way, an important computational time could be
saved.
• Furthermore, the current implementation fills a
dense matrix for the estimator linear system from
the sparse Jacobian matrix of the system. Howe-
ver, as the estimator matrix should also be very
sparse, an important computational time could be
saved by solving this linear system with the KLU,
which is a sparse solver.
• In addition, we noted that there are significantly
more Jacobian updates when using IDASPM
compared with IDA. Generally, the Jacobian ma-
trix is updated by the integrator when the Newton
algorithm fails to converge. These convergence
fails may be due to major changes in Jacobian ma-
trix. However, there is no apparent reason for the
Jacobian matrix of IDASPM to change more than
those of IDA. This point is to investigate, espe-
cially as updating the Jacobian matrix requires to
perform a new factorization for the Newton itera-
tions.
• To finish, in our current implementation of
IDASPM within Dynamo, the Fourier coefficients
are set to zero. Then, for each tested case, we can
see that the step size is limited at the very begin-
ning of the simulation. So, by properly initializing
the Fourier coefficients, some iterations could be
saved at that very time. However, the presented
results prove the robustness of the estimator as
Fourier coefficients converge in a few number of
iterations.
5 CONCLUSIONS
In conclusion, the implementation presented in this
paper paves the way to long-term EMT simulations
of power systems within a very flexible framework.
Using Modelica and especially our customized envi-
ronment based on OpenModelica enables to clearly
distinguish the modeling and solving aspects of the si-
mulation. Furthermore, using the proposed IDASPM
solver leads to a very important reduction of the num-
ber of iterations for performing a simulation, com-
pared to the original IDA solver. However, as the
current implementation of our method is not comple-
tely optimized, there is no speedup on larger test ca-
ses. Therefore, our further developments will focus
on optimizing the estimator, in which the main part of
the computational time is currently spent. Indeed, as
mentioned in the results discussion, some accessible
enhancements are envisioned, especially for reducing
the computational cost of linear algebra operations. In
addition, we could investigate strategies for activating
and deactivating the Fourier coefficients update du-
ring transient phases. Indeed, in such phases, as the
Fourier estimation is perturbed, the step size is finally
limited.
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
42

ACKNOWLEDGMENT
The authors would like to thank the French Natio-
nal Research Agency in Technology who founded this
project under the contract CIFRE n
o
2015/0885.
REFERENCES
Abbas Taher, S., Mahmoodi, H., and Aghaamouei, H.
(2015). Optimal pmu location in power systems using
mica. Alexandria Engineering Journal.
Astic, J., Bihain, A., and Jerosolimski, M. (1994). The
mixed adams-bdf variable step size algorithm to si-
mulate transient and long term phenomena in po-
wer systems. IEEE Transactions on Power Systems,
9(2):929–935.
Brayton, R. K., Gustavson, F. G., and Hachtel, G. D. (1972).
A new efficient algorithm for solving differential-
algebraic systems using implicit backward differenti-
ation formulas. Proceedings of the IEEE, 60(1):98–
108.
Chieh, A. S., Panciatici, P., and Picard, J. (2011). Power
system modeling in modelica for time-domain simu-
lation. In PowerTech, 2011 IEEE Trondheim, pages
1–8. IEEE.
CRSA, RTE, TE, and TU/e (2011). D4.1: Algorithmic re-
quirements for simulation of large network extreme
scenarios. Technical report, PEGASE Consortium.
Demiray, T. (2008). Simulation of power system dynamics
using dynamic phasor models. PhD thesis, ETH Zu-
rich.
Demiray, T., Milano, F., and Andersson, G. (2007). Dyna-
mic phasor modeling of the doubly-fed induction ge-
nerator under unbalanced conditions. In Power Tech,
2007 IEEE Lausanne, pages 1049–1054. IEEE.
Fritzson, P., Aronsson, P., Pop, A., Lundvall, H., Ny-
strom, K., Saldamli, L., Broman, D., and Sandholm,
A. (2006). Openmodelica: A free open-source en-
vironment for system modeling, simulation, and te-
aching. In Computer Aided Control System Design,
2006 IEEE International Conference on Control Ap-
plications, 2006 IEEE International Symposium on
Intelligent Control, 2006 IEEE, pages 1588–1595.
IEEE.
Fritzson, P. and Engelson, V. (1998). Modelica: A uni-
fied object-oriented language for system modeling
and simulation. In European Conference on Object-
Oriented Programming, pages 67–90. Springer.
Gibert, P.-M., Losseau, R., Guironnet, A., Panciatici, P.,
Tromeur-Dervout, D., and Erhel, J. (2018). Speedup
of emt simulations by using an integration scheme en-
riched with a predictive fourier coefficients estimator.
under review.
Gibert, P.-M., Tromeur-Dervout, D., Panciatici, P., Beaude,
F., Wang, P., and Erhel, J. (2017). A generic cu-
stomized predictor corrector approach for accelera-
ting emtp-like simulations. In PowerTech, 2017 IEEE
Manchester, pages 1–6. IEEE.
Guironnet, A., Saugier, M., Petitrenaud, S., Xavier, F., and
Panciatici, P. (2018). Towards an open-source solution
using modelica for time-domain simulation of power
systems. under review.
Hindmarsh, A. C., Brown, P. N., Grant, K. E., Lee, S. L.,
Serban, R., Shumaker, D. E., and Woodward, C. S.
(2005). Sundials: Suite of nonlinear and differen-
tial/algebraic equation solvers. ACM Transactions on
Mathematical Software (TOMS), 31(3):363–396.
Petzold, L. R. et al. (1982). A description of dassl: A diffe-
rential/algebraic system solver. Scientific computing,
1:65–68.
Scilab, E. et al. (2012). Scilab: Free and open source soft-
ware for numerical computation. Scilab Enterprises,
Orsay, France, page 3.
Vanfretti, L., Rabuzin, T., Baudette, M., and Murad, M.
(2016). itesla power systems library (ipsl): A mo-
delica library for phasor time-domain simulations.
SoftwareX, 5:84–88.
Weidendorfer, J. (2008). Sequential performance analysis
with callgrind and kcachegrind. In Tools for High Per-
formance Computing, pages 93–113. Springer.
Use of the Sinusoidal Predictor Method within a Fully Separated Modeler/Solver Framework for Fast and Flexible EMT Simulations
43
