
Semi-Autonomous Navigation for Virtual Tactical Simulations in the
Military Domain
Juliana R. Brondani
1
, Luis A. L. Silva
2
, Mateus B. Rutzig
2
, Cesar T. Pozzer
2
, Raul C. Nunes
2
,
João B. Martins
2
and Edison P. de Freitas
1
1
Graduate Program in Electrical Engineering, Federal University of Rio Grande do Sul, Porto Alegre, RS, Brazil
2
Graduate Program in Computer Science, Federal University of Santa Maria, Santa Maria, RS, Brazil
Keywords: Semi-autonomous Navigation, Tactical Simulation.
Abstract: Integrated constructive and virtual simulations are becoming popular for tactical training in the military do-
main. An important aspect concerning the integration of these simulation models in the construction of virtual
tactical simulations is the modelling and implementation of different kinds of semi-autonomous agents. A
fundamental feature of these agents is the capability of intelligently and realistically modelling task-oriented
navigation activities in large virtual terrain simulation environments, while following underlying military
doctrine and tactics. This paper reviews important navigation issues that emerge in such simulation systems
and prominent Artificial Intelligence (AI) techniques that have been explored to solve them. From this anal-
ysis, a hybrid, semi-autonomous navigation framework is proposed aiming to fulfil the needs of virtual tactical
training simulations, more specifically, in the military domain. As implemented in a system for the virtual
tactical simulation of artillery battery tasks, the framework shows how to overcome the challenges of imple-
menting realistic global and local navigation behaviours for military units and, at the same time, it shows that
the semi-autonomous behaviours implemented are of primary importance to allow interaction with users for
learning purposes in the simulation exercises.
1 INTRODUCTION
Simulation systems are gaining more popularity for
educational purposes, in which one of the most tradi-
tional and prominent scenarios is the case of military
training (e.g. (Heinze et al., 2002); (Fletcher, 2009)),
although there is an increasing interest in other do-
mains, like industrial (e.g. (Murphy and Perera,
2002)) and medical (e.g. (McGaghie et al., 2010)) to
name a few. These simulation systems present them-
selves as challenging environments for the investiga-
tion and proposition of solutions for semi-autono-
mous navigation problems as they allow agents to
recreate different behaviours realistically.
In military simulations, Computer Generated
Forces (CGFs) or Semi-Autonomous Forces (SAFs)
(Tambe, Johnson et al., 1995) are developed to popu-
late constructive, virtual and blended simulation sys-
tems (Stevens et al., 2015). It is expected that these
forces would act as substitutes for key real-life enti-
ties, for which semi-autonomous navigation behav-
iours stand out when users need to be in the control of
the simulated entities as part of the development of
different military training goals. For this reason, the
primary goal of these agents is to replicate relevant
aspects of human behaviours realistically, while fol-
lowing military doctrine. When dealing with the im-
plementation of semi-autonomous navigation behav-
iours, there are intelligent techniques proposed in the
literature. However, most of these techniques only
handle part of the relevant navigation issues in these
systems, which indicates that these techniques seldom
consider the implementation of complex, layered sim-
ulation scenarios. As discussed in this paper, there are
dynamic navigation and collision detection/avoid-
ance issues to be considered by a combination of
global and local agent navigation behaviours. These
behaviours should be consistent with real-life agent’
actions. Moreover, for any military simulation, agents
also compute navigation actions relying on data struc-
tures that represent relevant characteristics of large
real-life terrain environments.
From this landscape, this paper discusses alterna-
tive navigation techniques ought to be combined in a
Hybrid, Semi-Autonomous Navigation Framework to
Brondani, J., Silva, L., Rutzig, M., Pozzer, C., Nunes, R., Martins, J. and Freitas, E.
Semi-Autonomous Navigation for Virtual Tactical Simulations in the Military Domain.
DOI: 10.5220/0006863104430450
In Proceedings of 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2018), pages 443-450
ISBN: 978-989-758-323-0
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
443

support the development of realistic simulations in
virtual tactical simulation systems. As proposed here,
these virtual tactical simulations provide an environ-
ment in which low- or mid-level decision makers can
train their skills in how to better move and employ
their units in a battle scenario to accomplish their mis-
sions. Filling the gap that exists in between construc-
tive and virtual simulations, this type of virtual tacti-
cal simulation is grounded on a realistic scenario that
presents all the necessary elements to exercise the tac-
tical skills of these low- or mid-level commanders.
The paper is organized as follows: First, promi-
nent techniques used to address the agents’ navigation
tasks are analyzed. Second, the virtual tactical simu-
lation is discussed, highlighting its main characteris-
tics and differences from the other types of simula-
tion. Third, the Hybrid Semi-Autonomous Naviga-
tion Framework exploring the studied concept of vir-
tual tactical simulation is presented and analyzed
along with an application example. Then, discussions
are presented highlighting relevant aspects raised dur-
ing the development of the proposed framework, and
finally, the concluding remarks are presented.
2 AGENT’S NAVIGATION
BEHAVIORS IN SIMULATION
SYSTEMS
Navigation issues have been handled by different
techniques proposed in the literature (Botea et al.,
2013) (Kapadia and Badler, 2013) (Algfoor et al.,
2015). This section describes the most used ones in
simulation systems for the military domain, allowing
one to assess whether they cover the semi-autono-
mous navigation requirements of agents involved in
virtual tactical simulation environments.
2.1 A* Algorithms
The A* algorithm (Nilsson, 1998) is an instance of a
deliberative approach to the solution of navigation
problems. Although the A* algorithm is widely ex-
plored in different fields, the computational cost of
executing it may become prohibitive. That is because
the computation cost of the A* sharply increases as
the size of the virtual simulation environment and the
number of agents increase. Some proposals to deal
with known limitations of the A* algorithm are worth
mentioning: i) The Local Repair A* (LRA*) de-
scribes a family of algorithms based on the recalcula-
tion of the remaining of an agent route when a colli-
sion with other simulation objects is imminent (Sil-
ver, 2005). ii) The Cooperative A* (CA*) searches
for a path while considering the routes which are
planned for other agents being executed in the simu-
lation system (Silver, 2005). iii) The D* algorithm
(Stentz, 1994) is capable of planning paths in un-
known or partially known and changing environ-
ments as it is dynamic in the sense that the cost pa-
rameters used can change during the search for the
solution. This technique also has known optimiza-
tions called D* Lite (Koenig and Likhachev, 2002)
and Anytime D*(Likhachev et al., 2005). However,
these proposals still have computational limitations
when the virtual terrain size increases as this situation
is often related to the increasing of the memory space
requirements and the complexity of the simulation
scenario. In these cases, hierarchical A* techniques
are promising as they speed up the pathfinding pro-
cess by reducing the complexity of the problem sce-
nario as the pathfinding is broken down in a hierar-
chic structure (Cui and Shi, 2011). One of the first
proposals of this hierarchical algorithm (Botea et al.,
2004) proposes the HPA* (Hierarchical Path-Finding
A*), a “hierarchical approach for reducing problem
complexity in path-finding on grid-based maps.” This
technique proposes the creation of abstraction levels
relying on clusters obtained from a regular grid ter-
rain representation. The hierarchical approach miti-
gates the memory space problem and allows faster re-
sults to be computed. However, when dealing with a
virtual terrain with large dimensions, as it is often the
case of a simulation system for representing a real-
life environment, it is not feasible to use a terrain rep-
resentation, which is based on a regular grid. (Dooms,
2013) uses an A* adaptation to navigate upon a quad-
tree representation of the terrain, allowing rapid ad-
aptation to a terrain representation which can be dy-
namic as this solution only requires a limited number
of nodes to be re-evaluated. This algorithm still pre-
sents some drawbacks like the absence of parallelism
during the search and the use of a regular grid in the
representation of the space that is inside of each quad-
tree node.
2.2 Potential Fields
Potential fields and influence maps are strategies
commonly used to treat dynamic obstacles (Silveira
et al., 2010) (Hagelbäck, 2012). They are concepts
originated in the robotics fields, first introduced for
the treatment of real-time obstacle avoidance, which
is a central issue in the development of navigation al-
gorithms for mobile robots (Khatib, 1986). The main
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
444

idea of the potential fields approach is to place attract-
ing or repelling charges at points of interest in a sim-
ulation map. The overall idea is that the agent can cal-
culate the resulting force according to the fields that
are available in the positions around the agent, and
then navigate to the most attracting position in the
near surroundings. The problem of this reactive be-
haviour is that the navigation algorithm may get stuck
at local optima where the highest potential position is
the current position of the agent, but this highest po-
tential position is not the destination position. In
(Hagelbäck, 2012), this problem was handled by as-
signing small repelling fields to the last agent posi-
tions, like a pheromone trail used by ants. This ap-
proach was successfully used in the Open Real Time
Strategy (ORTS) system (Hagelbäck and Johansson,
2008) as the maps representations used present large
open areas. As reported in (Hagelbäck, 2012), in
which maps from the popular RTS game StarCraft
were considered, which are complex and have many
choke points, the solution proposed did not work well
due to a large number of local maxima. To overcome
these problems, a potential field technique combined
to a traditional A* was used, resulting in a hybrid ap-
proach. Although this global-local approach gener-
ates a more realistic behaviour for each agent, it in-
curs in a high computation cost because the agent
keeps analyzing its surroundings and calculating the
potential of each cell in its local map representation.
2.3 Steering Behaviours
(Reynolds, 1999) defined steering behaviour for au-
tonomous agents as the ability to navigate around
their world in a life-like and improvisational manner.
Different steering behaviours like seek, flee and ar-
rive for a simple vehicle model are proposed. Then
these basic behaviours can be combined as to gener-
ate ones that are more complex. The steering behav-
iours are described in terms of the geometric calcula-
tion of a vector representing the desired steering force
(Reynolds, 1999). Due to the representation simplic-
ity of this approach in the solution of navigation prob-
lems, it is a popular framework in the computer game
scenario. Despite this fact, problems like a trajectory
with oscillations or a resultant vector being zero can
appear when the steering approach is used. (Frey,
2015) describes attempts to overcome these steering
difficulties with the introduction of weighting, prior-
itization and awareness concepts. However, these at-
tempts might not solve the cited problems or, if they
do, they increase the complexity of the system. For
this reason, a technique called Context Steering is
proposed. The basic idea is the use of context maps,
where these maps describe interest and danger vector-
based points around an agent. Then, map information
is combined to elect which vector describes the better
final decision according to the current state of the sys-
tem. This resulting approach maintains the benefits of
the steering behaviour since it creates a more “intelli-
gent” behaviour at a local level for each agent.
2.4 Velocity Obstacles
Velocity Obstacle (VO) is most commonly used in
the solution of reactive or local navigation problems.
This technique emerged in the field of robotics (Fio-
rini and Shiller, 1998). VO defines a set of robot ve-
locities (in geometric representation) that would re-
sult in a collision between the robot and a moving ob-
stacle. However, the VO approach presents some
drawbacks. One of them is the high computation cost
to keep updating the velocities of agents during the
execution of the system. Another difficulty is that
agents do not consider that other agents also have de-
cision-making abilities. In (Van den Berg et al.,
2008), this issue is addressed with the development of
the Reciprocal Velocity Obstacle (RVO) approach.
RVO assumes that other agents in the simulations are
also capable of similar collision-avoidance reasoning
while guaranteeing oscillation-free motions. How-
ever, RVO ended up creating another issue called “re-
ciprocal dance” (Feurtey, 2000). Reciprocal dance
occurs when two agents cannot reach an agreement
on which side to navigate around each other. To over-
come this problem, a Hybrid Reciprocal Velocity Ob-
stacle (HRVO) (Van Den Berg et al., 2011) approach
was proposed. HRVO eliminates almost all oscilla-
tions in practice, but it does not guarantee smoothness
in the movement. Therefore, trying to address all the
problems cited before, the Optimal Reciprocal Colli-
sion Avoidance (ORCA) (Snape et al., 2012) can the-
oretically guarantee no oscillations and smooth
movement.
3 VIRTUAL TACTICAL
SIMULATIONS: FILLING
THE GAP BETWEEN
CONSTRUCTIVE AND
VIRTUAL SIMULATION
SYSTEMS
There is a live discussion about military simulation
systems and their applicability. A consensus that
emerges among the practitioners in this area is that
Semi-Autonomous Navigation for Virtual Tactical Simulations in the Military Domain
445

there are clear benefits of using live, virtual and con-
structive simulations for military training. Such ben-
efits are even augmented when these three conceptual
types of simulation are combined in joint LVC simu-
lations (Hodson and Hill, 2014). Despite these con-
ceptual classifications, there are intermediary zones
between constructive and virtual, and between virtual
and live simulations (Meyer et al., 2014). The use of
virtual simulations usually targets the training of tech-
nical and operational skills regarding a given military
equipment. Thus, this specific application of virtual
simulations can be characterized as virtual technical
simulations. The second application of virtual simu-
lations, which is more linked to constructive ones,
does not target the training of how to handle a piece
of equipment, but it is concerned with tactical aspects.
This usage contrasts to constructive simulations,
which are concerned with higher-level (strategic) as-
pects, completely abstracting finer details of a spe-
cific terrain, for instance. Thus, it is possible to define
this second kind of virtual simulations as virtual tac-
tical simulations.
Considering its proximity to the constructive sim-
ulation, the best way to build-up this virtual tactical
simulation concept is to present examples of situa-
tions in which this type of simulation is used. In our
project, the employment of an artillery battery in a
military operation can be taken as a motivational ex-
ample. In this simulation application, the role of a
constructive simulation is to train high-ranked com-
manders in the situations in which it is worth using
the battery. In this type of simulation, higher-ranked
officers (e.g., generals and their high-level staff) se-
lect priority areas and targets in which the battery will
act, for instance. In this constructive simulation, how-
ever, the engagement of desired targets occurs ac-
cording to given rules, and this is enough to provide
automatically generated results to be analyzed by
these high-ranked commanders. Everything in be-
tween from the moment of the decision-making to the
return of the simulation results is entirely abstracted,
i.e., without any interference of the intended users.
Analyzing what happens between these above de-
scribed moments, several tactical decisions about
how to better employ the battery are taken in a real-
life military operation. From the moment in which
commanders of the battery receive the command to
engage a given set of targets, low- or mid-level mili-
tary personnel also need to tactically analyze the ter-
rain, to select where the most suitable routes are as to
safely navigate with vehicles that compose the bat-
tery, among other doctrine-based tasks. It is relevant
to observe that a virtual technical simulation system
is not able to train someone with the necessary skills
to take these tactical decisions. However, where will
the commander of the battery train his/her tactical
skills to best select and execute a set of tactical actions
as mentioned above? It is particularly for this type of
real-life training situation that the virtual simulation
is tailored for.
In virtual tactical simulations, there are different
degrees of user interaction, which go from very high-
level orders (like in the constructive ones) to more de-
tailed ones (which are closer to technical-virtual or
life simulations). Depending on the situation being
simulated, these levels of interaction, which need to
be reflected in the levels of autonomy of the simula-
tion algorithms being used, may also be used alter-
nately. In this context, an important issue for virtual
tactical simulation systems in the field of military
training is that they are used for educational purposes.
In these systems, therefore, simulated agents have the
capacity of receiving both computational and human
inputs, as well as the capacity of reasoning about the
best outcome of these actions according to their cur-
rent situation.
4 A CASE FOR A HYBRID
SEMI-AUTONOMOUS
NAVIGATION FRAMEWORK
FOR VIRTUAL TACTICAL
SIMULATIONS
Navigation algorithms described in the literature are
mostly focused on solving specific navigation prob-
lems. It means that they are rarely combined to handle
realistic simulation scenarios where the navigation is-
sues change dynamically. To address this drawback,
a Hybrid, Semi-Autonomous Navigation Framework
is proposed aiming to fulfil the needs of virtual tacti-
cal training military simulations. The overall idea of
the proposed hybrid navigation framework is to com-
bine global and local navigation approaches to tackle
static and dynamic simulation issues over open fields
and roads of a large virtual terrain considering the
doctrine-oriented navigation demands of an artillery
battery in a tactical battle scenario.
The global navigation approach works over a
symbolic representation of the virtual terrain environ-
ment to search longer paths where the algorithms
used have to consider simulation performance con-
straints. To couple with that, the proposed framework
employs a multi-resolution quadtree data structure
that symbolically represents static obstacles found in
the virtual terrain scenario (Figure 1 (A)). In many
senses, such multi-resolution quadtree supports the
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
446
use of a hierarchical A* navigation algorithm. Thus it
is possible to find paths in large virtual terrains with
lower overhead than traditional A* algorithm.
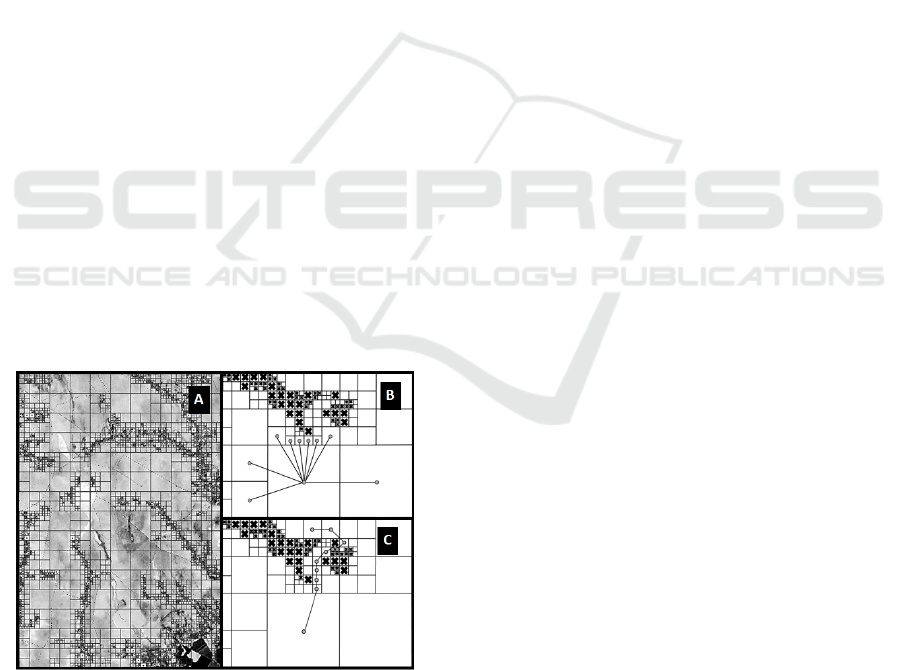
In Figure 1 (A), a real large terrain (50km²) is di-
vided into a quadtree containing thirteen representa-
tion levels. The proposed quadtree coupled to the hi-
erarchical A* automatically adjusts the depth of the
structure considering non-functional requirements of
the simulation system, such as available computation
capability and memory footprint. For instance, if
there are enough memory and execution time for a
finer search of an agent route in the virtual terrain en-
vironment, the algorithm considers finer terrain reso-
lutions to allow the construction of a more accurate
navigation result. Based on the division shown in Fig-
ure 1 (A), the representation structure can reach a res-
olution around 2 meters in its finest level, allowing
the representation of relevant obstacles such as rivers,
mountains and trees, as these obstacles are identified
in real-life terrain regions of military training (i.e., us-
ing the different map representation of a military
training field). As far as static navigation obstacles
are concerned, the multi-resolution terrain represen-
tations allow the algorithm to quickly detect a path
from one point to another in the virtual terrain if such
path exists. When constructing such quadtree struc-
ture upon the terrain, the navigation algorithm easily
identifies all the navigation-prone neighbouring
nodes of the one that is being analyzed (Figure 1 (B)).
As a result, a path is returned (Figure 1 (C) as required
to simulate a tactical action involving a path-follow-
ing movement of an agent in a simulation exercise –
such kind of path is represented by the line having
circle markers in this Figure 1).
Figure 1: (A) Example of the terrain represented in a quad-
tree structure. (B) Connections between the nodes of the
quadtree. (C) Path defined by the A* upon the quadtree rep-
resentation.
Overtaking dynamic obstacles while the simula-
tions are running is not a straightforward task. Con-
stantly recalculation of paths for every agent may be
prohibitive during real-time simulation executions
even when an optimized virtual structure is available,
such as a quadtree, to also represent the whereabouts
of dynamic obstacles. For this reason, a local naviga-
tion strategy needs to be used in combination with a
global pathfinding algorithm. Unlike the global navi-
gation, this local navigation perspective considers
that agents do not have a global view of the simula-
tion environments since they just maintain a continu-
ous and reactive relationship with their local sur-
roundings. Importantly, such local strategy is respon-
sible for the detection of dynamic obstacles and other
dangers that an agent may face during the virtual tac-
tical simulation exercises. To do so, the proposed
framework explores steering behaviour techniques
that are based on mathematical representations of the
forces in the modelling and implementation of local
navigation behaviours. Among other reasons, these
algorithms allow a quick calculation of the resulting
steering force, which is then used in the agents’ local
navigation actions.
As previously described, besides solving the
global and local navigation, the framework needs to
consider the military tactical doctrine to perform
these agents’ movements, as this requirement is fun-
damental to implement intelligent navigation algo-
rithms in virtual tactical simulation settings realisti-
cally. During the movement of a battery, although
agents adapt according to the current battle and ter-
rain situations, they are implemented as to not deviate
too much from a formation-kind of convoy organiza-
tion detailed by the doctrine (e.g., to maintain a col-
umn formation while moving). Different from many
computer game implementations, the proposed navi-
gation framework considers that the navigation guid-
ance coming from the military doctrine has a higher
priority than the global and local navigation algo-
rithms being executed.
5 THE SOLUTION OF A
PRACTICAL SIMULATION
SITUATION FOR GLOBAL AND
LOCAL SEMI-AUTONOMOUS
NAVIGATION
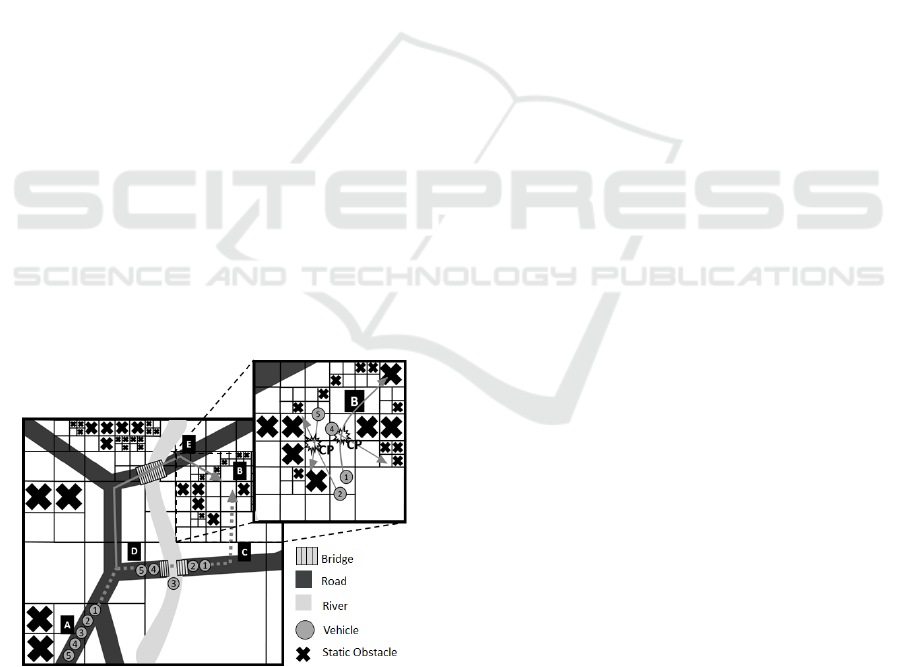
A practical simulation situation of a concrete military
exercise involving an artillery battery is illustrated in
Figure 2. This situation is representative of others that
occur when virtual tactical simulations are developed
Semi-Autonomous Navigation for Virtual Tactical Simulations in the Military Domain
447
in the implemented simulation system. As described
here, this situation illustrates the use of the global and
local semi-autonomous navigation algorithms imple-
mented in the framework. In doing so, this simulation
case involves a convoy with five vehicles parked at
point A as shown in Figure 2. According to the tacti-
cal goals of an artillery battery mission, the convoy
needs:
• to move from A to B;
• to deploy its artillery units in tactical positions in
B according to the military doctrine.
For the first goal, the hierarchical A* algorithm de-
fines, over the multi-resolution structure of the virtual
terrain representation, the best path from A to B (rep-
resented by dotted line in Figure 2). The best path is
not only the shortest path between these points, but
also the path that can consider key terrain character-
istics and the other forces (i.e. other agents) being
simulated in the current battle situation. It is im-
portant to notice that the defined path which is gener-
ated by the pathfinding algorithm considers move-
ment over different types of scenarios: roads and open
fields. When there are roads in the area (from A to C),
the pathfinding algorithm computes the route over an
undirected graph that contains information about the
roads and their interconnections. However, when an
open field area is considered in the movement (from
C to B), the pathfinding algorithm computes the route
according to the obstacle information present in the
nodes of the aforementioned quadtree structure. In the
end, this quadtree structure represents the information
that is observed by the agents allowing them to move
over the virtual terrain representation.
Figure 2: Example of a convoy execution a navigation task.
During the navigation of the convoy towards B,
the vehicles may face situations that were not ex-
pected when the A* algorithm was executed (i.e.,
when the path was calculated). During the execution
of the simulation exercise, as illustrated in Figure 2,
the first two vehicles of the convoy crossed the bridge
that connects A to B (passing by C). However, the
third vehicle broke the bridge and fell into the river as
a result of such a non-deterministic simulation situa-
tion. When this happens in this simulation system, the
simulation stops since the route from A to B as
planned by the global navigation algorithm no longer
exists. As defined in this virtual tactical simulation
system, this is a relevant military problem which was
selected to be simulated due to its educational value
to the users, among other such problems treated by
the system. In summary, such kinds of problems offer
relevant opportunities for simulation-based training.
Different from fully-autonomous simulation scenar-
ios, which are more common in constructive simula-
tion systems, the users here are invited to decide
which course of action they need to take according to
their knowledge and experience with the underlying
military doctrine and their mission goals, under these
new conditions. One course of action is to allow the
vehicles which already crossed the bridge (vehicles 1
and 2) to continue over the original route to reach the
destination B. When this happens, the hierarchical A*
algorithm is called again as to compute a new route
from D to B for the remaining vehicles (vehicles 4
and 5). This way, a new route from the D to B (repre-
sented by the solid line in Figure 2) is created to allow
the movement of vehicles 4 and 5. It is important to
notice the split of the original convoy and the need for
the user interaction to decide what the simulation sys-
tem should do next, which reveals that a completely
autonomous solution is not suitable in this kind of
simulated situation. As this fragment of simulation
exercise shows, there is a need for a certain degree of
agent semi-autonomy, which is provided by the pro-
posed framework that was implemented in the simu-
lator. Similar to this one, other situations also require
the intervention of users as the tactical training goals
of the simulation system requires. So, this simulation
training scenario requires the implementation of other
degrees of semi-autonomy in the global and local
agent navigation behaviours as this is likely to be the
case of other simulation systems similar to this one.
For the second goal, the convoy is deployed in a
selected region in the virtual terrain scenario accord-
ing to the rules of the tactical military doctrine. In the
example illustrated in Figure 2 (zoomed portion on
the top-left), when vehicles approach their tactical po-
sitions, many conflict points (CP) are found, as it is
expected to be the case of other multi-agent simula-
tion systems. It means that the A* algorithm was used
to define paths for different agents, where these paths
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
448

produced overlapping routes, which may cause colli-
sions among the agents while the simulations are run-
ning. In these dynamic simulation situations, the local
navigation algorithm takes over as implemented in
the simulator, applying steering behaviour forces to
avoid collision between dynamic obstacles. In the im-
plementation of social agent rules to solve such con-
flict situations, such as the rule: stop the movement
and give preference to, for instance, the switch be-
tween the global and local navigation does not need
to have user interaction, thus emphasizing the im-
portance of combining both navigation types in a hy-
brid solution. Even when these local algorithms are in
the control of the agents’ actions, it is relevant to no-
tice that the implemented algorithms also need to con-
sider that the guidelines of a military doctrine have to
be followed; otherwise, the local movement actions
will look like randomly implemented, which is some-
thing that provides a poor realism for the simulations.
While in many kinds of computer games the realism
may not be an issue while dealing with local move-
ment actions, this is a relevant aspect implemented in
our simulation system. As described here, parameters
in the semi-autonomous local algorithms (e.g., veloc-
ity, direction, etc.) are also explored by users under
training to allow them to guide these local actions of
movement as to fulfil defined training goals of the
tactical simulation exercises.
6 DISCUSSION
In the context of military tactical training, it happens
to be impractical to recreate complete scenarios using
real people and equipment due to the cost, amount of
required resources and even the danger in the han-
dling of military equipment without making sure that
users achieved a certain level of training maturity. In
this setting, constructive and virtual simulations have
been used for personnel training by familiarizing the
trainees with tools, vehicles, equipment, military doc-
trines and routines employed in real life. It also means
that there has been an increase of interest in the com-
bination of different types of simulations leading to
the term “blended training” (Stevens et al., 2015). Ex-
amples in the military simulation field that use
blended architectures integrating a constructive sys-
tem with human-in-the-loop are the Royal Australian
Force (RAAF) simulation system (Heinze et al.,
2002) and the semi-automated forces (SAFORS) in
the large-scale SIMNET environment (Tambe et al.,
1995). Different from these approaches, the proposal
presented in this paper is a hybrid semi-autonomous
navigation framework that allows a customized con-
trol of the tasks and agents being simulated. In addi-
tion, in virtual tactical simulations, the use of semi-
autonomous algorithms become relevant as they com-
bine a constructive navigation behavior with the pos-
sibility of human interference, which can provide dif-
ferent benefits for trainees involved in the simulation
exercises.
In the field of simulation, a hybrid solution is also
proposed in (Sahli and Moulin, 2005), describing how
to support wildland fire suppression actions in a vir-
tual environment scenario. As described in their
work, the single-use deliberative techniques (like A*)
is not sufficient to solve real problems, as their appli-
cation problem can present too many constraints.
These reasons also sustain the proposal of hybrid nav-
igation algorithms to navigate in simulation environ-
ments. The use of multiple navigation techniques al-
lows agents to plan a safe and fast route using a global
planner. It also allows such agents to deal with dy-
namic obstacles, other agents, and unforeseen situa-
tions by using local navigation techniques.
7 FINAL REMARKS
The modeling and implementation of realistic naviga-
tion behaviors is a fundamental feature for intelligent
agents in military simulation systems. This paper re-
visits the most prominent solutions in this area, high-
lighting key aspects of algorithms used in the con-
struction of alternative navigation strategies. While
reviewing the existing approaches, the paper proposes
a framework that combines navigation solutions to
address the realistic modeling of task-oriented mili-
tary navigation needs. This framework addresses lo-
cal and global navigation issues, the handling and
avoidance of static and dynamic obstacles, the exist-
ence of multiple military agents along with their nav-
igation needs, besides the possibility of semi-auton-
omy and user interaction in a simulation scenario.
Moreover, the paper also proposes the description of
large realistically terrains to allow the planning algo-
rithms to maintain a global vision of the scenario al-
lowing for better results in the pathfinding.
ACKNOWLEDGMENTS
We thank the Brazilian Army for the financial support
through the SIS-ASTROS Project (813782/2014), de-
veloped in the context of the PEE ASTROS 2020.
Semi-Autonomous Navigation for Virtual Tactical Simulations in the Military Domain
449

REFERENCES
Algfoor, Z. A., M. S. Sunar and H. Kolivand, 2015. A com-
prehensive study on pathfinding techniques for robotics
and video games. International Journal of Computer
Games Technology 2015: 7.
Botea, A., B. Bouzy, M. Buro, C. Bauckhage and D. Nau,
2013. Pathfinding in games. Dagstuhl Follow-Ups,
Schloss Dagstuhl-Leibniz-Zentrum fuer Informatik.
Botea, A., M. Müller and J. Schaeffer, 2004. Near optimal
hierarchical path-finding. Journal of game develop-
ment 1(1): 7-28.
Cui, X. and H. Shi, 2011. A*-based pathfinding in modern
computer games. International Journal of Computer
Science and Network Security 11(1): 125-130.
Dooms, A., 2013. Parallel multi-agent path planning in dy-
namic.
Feurtey, F., 2000. Simulating the collision avoidance be-
havior of pedestrians. Master's Thesis.
Fiorini, P. and Z. Shiller, 1998. Motion planning in dynamic
environments using velocity obstacles. The Interna-
tional Journal of Robotics Research 17(7): 760-772.
Fletcher, J., 2009. Education and training technology in the
military. Science 323(5910): 72-75.
Frey, A., 2015. Context Steering: Behavior-Driven Steering
at the Macro Scale. Game AI Pro 2: Collected Wisdom
of Game AI Professionals. S. Rabin. Natick, MA, USA,
A. K. Peters Ltd.
Hagelbäck, J., 2012. Potential-field based navigation in
starcraft. Computational Intelligence and Games
(CIG), 2012 IEEE Conference on, IEEE.
Hagelbäck, J., 2016. Hybrid pathfinding in StarCraft. IEEE
Transactions on Computational Intelligence and AI in
games 8(4): 319-324.
Hagelbäck, J. and S. J. Johansson, 2008. The rise of poten-
tial fields in real time strategy bots. Fourth Artificial
Intelligence and Interactive Digital Entertainment Con-
ference, Stanford University.
Heinze, C., S. Goss, T. Josefsson, K. Bennett, S. Waugh, I.
Lloyd, G. Murray and J. Oldfield, 2002. Interchanging
agents and humans in military simulation. AI Magazine
23(2): 37.
Hodson, D. D. and R. R. Hill, 2014. The art and science of
live, virtual, and constructive simulation for test and
analysis. The Journal of Defense Modeling and Simu-
lation 11(2): 77-89.
Johnson, C. and A. J. Gonzalez, 2008. Automated after ac-
tion review: State-of-the-art review and trends. The
Journal of Defense Modeling and Simulation 5(2): 108-
121.
Kapadia, M. and N. I. Badler, 2013. Navigation and steer-
ing for autonomous virtual humans. Wiley Interdisci-
plinary Reviews: Cognitive Science 4(3): 263-272.
Khatib, O., 1986. Real-time obstacle avoidance for manip-
ulators and mobile robots. The international journal of
robotics research 5(1): 90-98.
Koenig, S. and M. Likhachev, 2002. D* Lite. AAAI/IAAI
15.
Likhachev, M., D. I. Ferguson, G. J. Gordon, A. Stentz and
S. Thrun, 2005. Anytime Dynamic A*: An Anytime, Re-
planning Algorithm. ICAPS.
McGaghie, W. C., S. B. Issenberg, E. R. Petrusa and R. J.
Scalese, 2010. A critical review of simulationbased
medical education research: 2003–2009. Medical edu-
cation 44(1): 50-63.
Meyer, R., T. Andre, K. Conning Chik and G. Liming,
2014. Performance Evidence Management in Live, Vir-
tual, and Constructive Training. Journal of Applied
Learning Technology 4(4).
Murphy, S. P. and T. Perera, 2002. Successes and failures
in UK/US development of simulation. Simulation Prac-
tice and Theory 9(6): 333-348.
Nilsson, N. J., 1998. Artificial intelligence: a new synthesis.
Elsevier.
Reynolds, C. W., 1999. Steering behaviors for autonomous
characters. Game developers conference.
Sahli, N. and B. Moulin, 2005. Real-world pathfinding us-
ing agent-based simulation. Agent-Directed Simulation
Symposium, part of the SpringSim.
Silveira, R., L. Fischer, J. A. S. Ferreira, E. Prestes and L.
Nedel, 2010. Path-planning for RTS games based on
potential fields. International Conference on Motion in
Games, Springer.
Silver, D., 2005. Cooperative Pathfinding. AIIDE 1: 117-
122.
Snape, J., S. J. Guy, D. Vembar, A. Lake, M. C. Lin and D.
Manocha, 2012. Reciprocal collision avoidance and
navigation for video games. Game Developers Conf.,
San Francisco.
Stentz, A., 1994. Optimal and efficient path planning for
partially-known environments. Robotics and Automa-
tion, 1994. Proceedings., 1994 IEEE International Con-
ference on, IEEE.
Stevens, J., P. Kincaid and R. Sottilare, 2015. Visual mo-
dality research in virtual and mixed reality simulation.
The Journal of Defense Modeling and Simulation
12(4): 519-537.
Tambe, M., W. L. Johnson, R. M. Jones, F. Koss, J. E.
Laird, P. S. Rosenbloom and K. Schwamb, 1995. Intel-
ligent agents for interactive simulation environments.
AI magazine 16(1): 15.
Van Den Berg, J., S. Guy, M. Lin and D. Manocha, 2011.
Reciprocal n-body collision avoidance. Robotics re-
search: 3-19.
Van den Berg, J., M. Lin and D. Manocha, 2008. Recipro-
cal velocity obstacles for real-time multi-agent naviga-
tion. Robotics and Automation, 2008. ICRA 2008.
IEEE International Conference on, IEEE.
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
450
