
Fuzzy Logic based Model for Energy Consumption Trust Estimation in
Electric Vehicular Networks
Ilhem Souissi
1
, Nadia Ben Azzouna
1
, Tahar Berradia
2
and Lamjed Ben Said
1
1
Strategies for Modelling and ARtificial inTelligence research Laboratory (SMART Lab),
Institut Sup ´erieur de Gestion de Tunis, Universit´e de Tunis, Le Bardo, Tunis, Tunisia
2
Institut de Recherche en Syst`emes
´
Electroniques Embarqu ´es (IRSEEM Lab), ESIGELEC, Rouen, France
Keywords:
Trust, Energy Information, Attacks, Fuzzy Logic, Electric Vehicular Networks.
Abstract:
Electric vehicles emerged new applications that are strongly related to the energy constraints such as the
identification of the optimal path toward the vehicle’s destination or toward the nearest recharging station,
selection of the path where vehicle recovers extra energy, estimation of the need to recharge according to the
actual battery state and the traffic state, etc. However, in electric vehicular networks, vehicles may provide
wrong energy information due to sensors’ failure, selfish or malicious reasons. Therefore, energy-related
information trustworthiness needs to be evaluated in order to preserve the quality of the presented applications.
In this paper, we address the energy-related information trustworthiness to discriminate between credible
and erroneous values. Therefore, we propose a new fuzzy-based trust model that deals with the information
uncertainties. This model aims at detecting the wrong energy information that mismatches with the vehicle’s
behavior and ensure that only trustworthy and plausible energy-information are handled. Results prove the
performance of the proposed model and its capabilities to deal with several kinds of threats in different traffic
densities with high precision.
1 INTRODUCTION
The Internet of Vehicles (IoV) is a typical applica-
tion of the Internet of Things (IoT) in the transporta-
tion field. The main vision of the IoV is to en-
able multiple components to broadcast safety, effi-
ciency and infotainment services (Alam et al., 2015).
The IoV supports multiple kinds of communications
such as Vehicle-to-Sensor (V2S), Vehicle-to-Vehicle
(V2V), Vehicle-to-Infrastructure (V2I), Vehicle-to-
Network (V2N) and Vehicle-to-Human (V2H) (Sun
et al., 2016). Similarly, the emergence of the In-
ternet of Electric Vehicles (IoEV) involves the same
kinds of communications. However, the IoEV also
covers the Electric Vehicle-to-Electric Vehicle Supply
Equipment communications (Bayram and Papapana-
giotou, 2014). Over the last few years, Electric Vehi-
cles (EVs) have emerged to meet with ecological is-
sues mainly the environmental pollution and the lack
of natural resources. These vehicles are cost-effective
and easy to maintain (Bayram and Papapanagiotou,
2014) (Falk and Fries, 2012). However, EVs are
energy-constrained and suffer from the limited battery
capacity and the extensive charging time.
Alike the vehicular ad hoc networks (VANETs),
the open, distributed and highly dynamic nature of
the electric vehicular network makes it vulnerable to
many security threats that may affect the quality of
the provided services (Sumra et al., 2015). In such
network, misbehaving entities may broadcast bogus
and malicious information to affect the others’ deci-
sions. Hence, it is required to ensure the accuracy
of the received data to make effective decisions and
maintain the quality of services. Digital signature is
usually dedicated to ensure authentication, integrity
and non-repudiation (Al-Kahtani, 2012). However,
this technique cannot prevent authenticated vehicles
from misbehaving due to selfish reasons, malfunction
of embedded sensors, etc. Consequently, it is required
to assess the data trustworthiness so as to ensure that
only reliable data are disseminated in the network.
In the past decade, several trust management so-
lutions were proposed to overcome the security risks
in VANETs (Soleymani et al., 2015) (Zhang, 2011).
However, these solutions still present some limita-
tions regarding the system’s complexity, network se-
curity, etc. Moreover, sensed data in vehicular net-
works suffers from the fuzzy, inaccurate and uncertain
nature due to the quality of embedded sensors, the
intermittent connection, etc. Besides, to the best of
Souissi, I., Azzouna, N., Berradia, T. and Said, L.
Fuzzy Logic based Model for Energy Consumption Trust Estimation in Electric Vehicular Networks.
DOI: 10.5220/0006863202210233
In Proceedings of the 15th International Joint Conference on e-Business and Telecommunications (ICETE 2018) - Volume 2: SECRYPT, pages 221-233
ISBN: 978-989-758-319-3
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
221

our knowledge, none of the existing works addressed
the trustworthiness of the energy-related information
for EVs. Accordingly, in this paper we are interested
in the accuracy of the energy-related information in
electric vehicular networks. We are also interested
in V2N communications that ensure a direct connec-
tion between vehicles and a central processing entity.
Hence, we introduce a new fuzzy-based trust model
to cope with the malicious threats that provide wrong
energy information. This model considers two main
dimensions; the instant energy verification and the to-
tal energy verification. On the one hand, the first di-
mension intends to filter the inaccurate energy infor-
mation that mismatches with the vehicle’s accelera-
tion/ deceleration rate. On the other hand, the second
dimension deals with the unsteady and uncertain be-
havior of EVs. In summary, the main contributions of
this paper are:
• Propose a new fuzzy-based trust model in electric
vehicular networks to evaluate the trustworthiness
of the energy information based on two dimen-
sions: the instant energy verification and the total
energy verification.
• Provide a dynamic trust solution that adapts to the
different traffic densities and road characteristics.
• Conduct experiments to validate the performance
of the proposed solution to deal with multiple
kinds of threats in different traffic densities.
The rest of the paper is organized as follows: Sec-
tion 2 presents the related work. Section 3 provides
an overview about the problem definition. Section 4
introduces the proposed trust model. Section 5 de-
tails the suggested fuzzy logic based model. Section
6 presents the simulation results and discussions and,
section 7 concludes the paper.
2 RELATED WORK
In VANETs, multiple models for trust assessment are
proposed to mitigate the security risks. These mod-
els are categorized into three main classes: the entity-
centric trust, data/message-centric trust and hybrid
trust (Zhang, 2011) (Soleymani et al., 2015).
In general, the entity-centric trust models stand on
reputation and behavior evaluation. Reputation-based
trust models integrate the previous experience, direct
experience and recommendations from third parties.
Usually, the reputation of an entity evolves over time
according to its behavior. The more this entity be-
haves properly, the higher its reputation. M
´
armol and
P
´
erez (M
´
armol and P
´
erez, 2012) assumed that the rep-
utation score is computed according to previous in-
teractions and recommendations from adjacent vehi-
cles and from a central trusted authority. According to
the computed reputation, the authors apply the fuzzy
logic theory to decide whether to (1) reject the mes-
sage, (2) accept the message but do not forward it,
or (3) accept and forward the message. Wei et al.
(Wei et al., 2014) also focued on reputation assess-
ment. They adopted probability to evaluate the en-
tity’s reputation based on direct and indirect observa-
tions. Soni et al. (Soni et al., 2015) proposed a trust
based scheme for location finding to help the driver
to validate or deny the presence of the desired loca-
tion. To reach this purpose, they were based on the
majority voting from nearby vehicles. Hu et al. (Hu
et al., 2015) introduced a trust model for relay selec-
tion to guarantee that only the most reliable nodes are
selected for data transmission. The relay score that
refers to the candidate trust is calculated according to
the: (1) rate of successful routed messages and (2)
similarity level in regard to the routed message. Dah-
mane et al. (Dahmane et al., 2017) also presented
a weighted trust-aware relay selection scheme. They
combined the vehicles’ and context related informa-
tion such as the distance between the transmitter and
the candidate, the quality and lifetime of communica-
tion link as well as the rate of successful routed mes-
sages.
Several other trust models focus on the data trust
instead of the entity trust. Raya et al. (Raya et al.,
2008) were the first to investigate the message’s trust-
worthiness in ephemeral networks. They incorporated
(1) the correlative trustworthiness of the event and its
reporter, (2) the security status that reflects the entity
legitimacy and the (3) proximity in terms of time and
location. Mazilu et al. (Mazilu et al., 2011) were also
interested in the network security based on data trust
computation. This model uses similarity to find out
the coincidence between locally stored measurements
and the others’ detections. Zaidi et al. (Zaidi et al.,
2014) also adopted the same methodology to validate
their own measurements. They further investigated
the correlation between the speed, flow and density to
detect the rogue nodes that affect the quality of emer-
gency alerts. Alike the majority of the existing trust
models, all of the mentioned data-oriented trust mod-
els supposed that the trust-based decision should rely
on multiple messages to confirm the reliability of the
reported alert.
Regarding the hybrid trust, most of research stud-
ies combine the entity and message trust to achieve
more reliable and accurate trust estimation. Usually,
the entity trust represents one of the major factor to
build the message’s trustworthiness. Both Oluoch
(Oluoch, 2015) and Yao et al. (Yao et al., 2017a) as-
SECRYPT 2018 - International Conference on Security and Cryptography
222

sumed that the entity trust depends on its reputation
while the message trust is estimated according to the:
(1) reporter’s trustworthiness, (2) correlative trust of
the event and its reporter and (3) both time and lo-
cation. Li and Song (Li and Song, 2016) proposed
an attack resistant trust scheme. They combined the:
(1) functional trust and evidences from third parties
to evaluate the entity trust and (2) similarity between
the collected reports to validate the message’s trust-
worthiness. Soleymani et al. (Soleymani et al., 2017)
incorporated three main modules to decide whether to
trust an event or not. The experience module (refers to
reputation) depends on past interactions between ve-
hicles. The plausibility module aims at verifying the
correctness of the location information. The accuracy
module includes fog nodes that intend to store events-
related to the traffic state. Thus, whenever a vehicle
receives a warning, it asks fog nodes to prove or deny
the presence of the such event.
Most of the investigated trust schemes stand on
reputation assessment to validate the entity’s trust-
worthiness. Nonetheless, this methodology is not
well suited in highly dynamic environments since
it requires social connections that should last for a
long duration. We also highlight that some of these
schemes adopted predefined measurements (e.g. the
correlative trust of the event and its reporter) that may
affect the accuracy of the trust calculation. Moreover,
most of the cited research studies adopt fuzzy logic
and probability theory to cope with the information
uncertainties in VANETs. Some of these models use
fuzzy logic theory to compute trust based on basic pa-
rameters such as time, position, etc. (M
´
armol and
P
´
erez, 2012) (Soleymani et al., 2017). To the best
of our knowledge, none of the existing research ad-
dressed the trustworthiness of the energy-related in-
formation for EVs. In fact, electric vehicular net-
works have the same characteristics as VANETs.
However, they have additional restrictions, mainly the
energy-related constraints. Accordingly, in this paper
we introduce a new fuzzy-based trust model that re-
lies on the similarity assessment between messages in
terms of energy consumption. This model aims at fil-
tering the inappropriate reports in order to ensure that
only plausible measurements are considered to pro-
vide high quality of services.
3 PROBLEM DEFINITION
Nowadays, the emergence of cellular technologies
(e.g. 4G, 5G) and open WiFi access points enable
vehicles to directly communicate with the network
(V2N communication) particularly, with centralized
servers (Wang et al., 2014). In this paper, we as-
sume that the main roles of the server are to: (1) help
the driver to follow the optimal path (in terms of en-
ergy consumption, time and distance) and (2) decide
whether its battery state allows him to reach its des-
tination, depending on the traffic state, or not. To
reach this purpose, the server analyses and processes
messages from multiple dispersed vehicles in order to
mitigate the inherent security risks that may affect the
quality of the provided services.
Often, the network includes (1) credible entities
that behave properly and (2) malicious vehicles that
misbehave due to selfish reasons, sensors’ failure, etc.
These bad entities broadcast erroneous information
about their position, speed, energy consumption, etc.
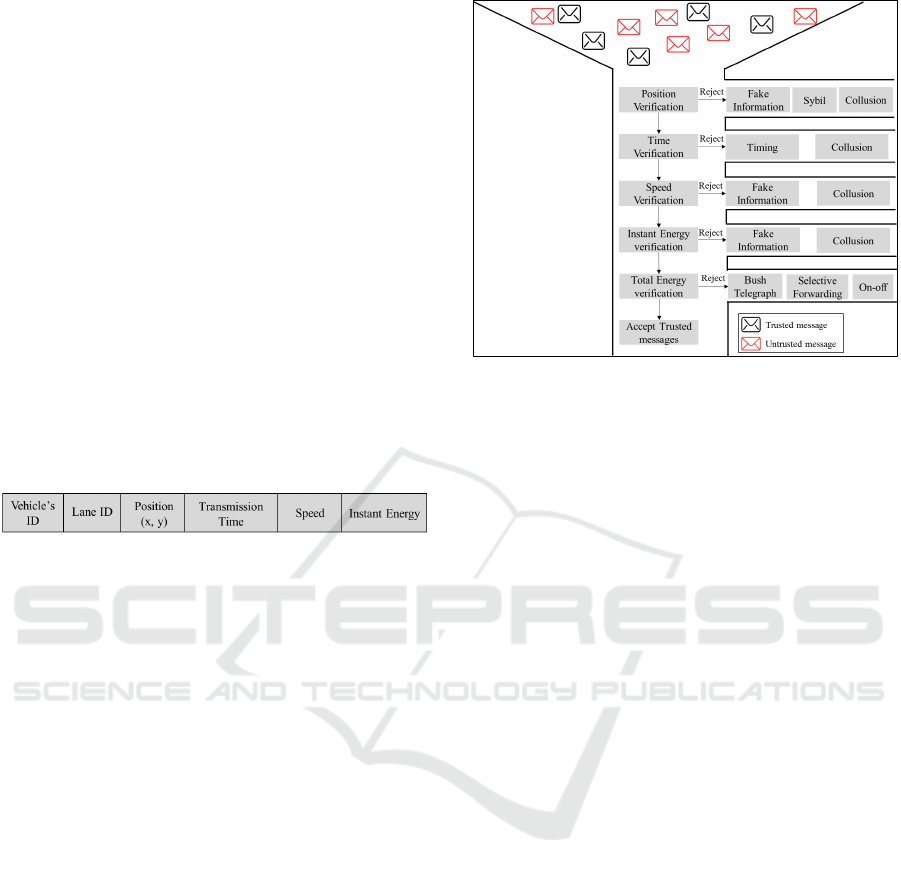
Our model addresses the following types of security
threats as depicted in Figure 2 (Sumra et al., 2015):
• Sybil attack: sends multiple messages under dif-
ferent identities and from different locations to lie
about the real traffic state.
• Fake information attack: injects erroneous infor-
mation about its speed, energy, etc. For example,
a vehicle says that it runs with a low speed and
it consumes a big amount of energy to discourage
the other vehicles to follow the same lane.
• Timing attack: creates a delay to prevent the
server from receiving real-time information.
• Selective forwarding attack: forwards messages
with low interest. For example a vehicle may only
transmit messages whenever it consumes energy
(i.e. denies that it recovers energy in downhill
roads) in order to say that the followed lane is
greedy in terms of energy consumption.
• On-off attack: behaves alternatively to maintain
the same level of trust. For example, a vehicle
transmits an accurate energy consumption value at
time t-1 and thereafter, it lies about the consumed
energy between the two instants t-1 and t.
• Bush telegraph attack: applies a slight modi-
fication, that cannot be perceived, to the right
measurement. For example, whenever a vehi-
cle sends its energy consumption between two in-
stants, it executes a slight modification to deceive
the server in identifying the optimal path.
• Collusion attack: a set of vehicles collude to reach
the same purposes. For example, they lie about
the energy consumption on a specific lane to con-
vince the server that this lane is greedy in terms of
energy consumption.
We highlight that there is a crucial need to propose
an effective and reliable trust management scheme
that mainly deals with energy-related issues for EVs.
Fuzzy Logic based Model for Energy Consumption Trust Estimation in Electric Vehicular Networks
223
The main role of this scheme is to maintain the quality
of the provided services (e.g. ensure that only trusted
messages contribute during the identification of the
optimal path).
4 SIMILARITY-BASED TRUST
ESTIMATION MODEL FOR
ELECTRIC VEHICLES
In electric vehicular networks, each vehicle periodi-
cally transmits its ID, position, speed, etc. (the struc-
ture of the message is depicted in Figure 1) to enable
the server to estimate the shortest path in terms of en-
ergy consumption, distance and travel time. Subse-
quently, we should underline that the server does not
have prior knowledge about the required energy for
the driver’s path due to the variation of the: (1) traffic
condition, (2) and the state of the environment (e.g.
accident, work-zone, heavy rain or snow).
Figure 1: Structure of the transmitted message.
In this paper, we present a new trust model to al-
low the server to filter the received messages as shown
in Figure 2. Based on this model, the server will only
consider plausible and trusted messages. Firstly, it
starts by grouping vehicles that belong to the same
lane. Accordingly, it is required to evaluate the accu-
racy of the reported lane as well as the vehicle’s posi-
tion. Thereafter, the server verifies the message valid-
ity to identify the outdated ones. Afterwards, it evalu-
ates the trustworthiness of the reported speed. As the
focus of this paper is on the accuracy of the reported
consumed energy for EVs, then we will stand on ex-
isting works for position, time and speed verification
as referred in (Yang, 2013) (Soleymani et al., 2017)
(Yao et al., 2017b).
Subsequently, the server assesses the reliability of
the reported energy consumption at each instant based
on the: (1) vehicle’s behavior (i.e. accelerates or de-
celerates) and (2) correlation between the speed varia-
tion and the sign of energy. The aim behind the instant
energy verification is to filter messages coming from
malicious vehicles that broadcast false energy infor-
mation. At the last step, the server evaluates the sim-
ilarity between the overall reported energy, by each
vehicle, on each lane according to: (1) the vehicle’s
position regarding the lane, and (3) the correlation be-
tween the average speed and the consumed energy. In
this stage, the server can detect the bush telegraph,
on-off and selective forwarding attacks.
Figure 2: Overview of the proposed model.
This model can effectively deal with several kinds
of threats (as depicted in Figure 2). The similarity
assessment between messages in terms of all of the
aforementioned parameters (position, time, speed and
energy) allows the server to identify and reject mes-
sages coming from malicious EVs. We underline that
this model is time-effective since it can speed up the
selection of the most trusted messages based on a se-
quential filtering. That is to say that whenever the
server detects weird and incredible information, it di-
rectly rejects them without the need to pass through
the other steps. We also underline that the fuzzy logic
theory can effectively evaluate the message’s trust-
worthiness in terms of energy consumption. The rea-
son behind the use of such theory is because of its
ability to: (1) deal with fuzzy, uncertain and impre-
cise measurements and (2) transform uncertain and
imprecise information into precise and accurate re-
sults. In the next section, we present and detail the
role of fuzzy logic to differentiate between trustwor-
thy and untrustworthy messages.
5 FUZZY-BASED TRUST
ASSESSMENT APPROACH
In this section, we detail the proposed fuzzy-based
model for energy trust assessment. Indeed, fuzzy
logic is able to transform the information-based per-
ception into information-based accurate measure-
ments (Klir and Yuan, 1995) (Zadeh, 2004). This the-
ory consists of three main phases:
• Fuzzification: converts the real domain into fuzzy
domain. At this stage, it is required to specify the
system’s inputs/ outputs, the size of the universe
SECRYPT 2018 - International Conference on Security and Cryptography
224

of discourse, the fuzzy classes and membership
functions (Klir and Yuan, 1995).
• Inference: there are three main inference meth-
ods: min-max method, max-prod method and
sum-prod method (Klir and Yuan, 1995). In this
paper, we use the min-max method since it is the
most commonly used one due to its simple struc-
ture. The inference process aims to represent the
correlation between the inputs and outputs using
the fuzzy rules.
• Defuzzification: transforms the fuzzy domain into
accurate and precise domain. Several defuzzi-
fication methods exist in the literature: bisector
method, mean of maxima method and centroid
method (Saade and Diab, 2004). In this paper,
we use the centroid method since it provides more
effective results than the other models (Saade and
Diab, 2004). The centroid is computed as follows:
Centroid =
R
x
i
µ(x
i
)
R
µ(x
i
)
x
i
and µ(x
i
) denote the fuzzy value and aggregated
membership function, respectively.
5.1 Assumptions
Our fuzzy-based trust model considers a set of as-
sumptions as follows:
(a) Each vehicle periodically sends its energy con-
sumption.
(b) The vehicle’s ID remains static until the vehicle
moves from one lane to another.
(c) The number of malicious entities that collude
to affect the instant/ total energy consumption
should not exceed the number of legitimate en-
tities.
(d) The number of vehicles that belong to the same
lane is greater than two.
(e) The energy trust is estimated for the same type of
electric vehicles.
(f) Only trusted messages in terms of position, trans-
mission time and speed are handled during the en-
ergy verification.
(g) The speed is the most influential factor that has a
great impact on the energy consumption for EVs
(Badin et al., 2013). The more the EV accelerates
or decelerates, the higher the energy consumed or
recovered, respectively.
5.2 Description of the Proposed Model
In this subsection, we detail the presented model for
the: (1) Instant Energy Verification (IEVer) and, (2)
Total Energy Verification (TEVer) in order to en-
sure that only trusted energy information is consid-
ered by the server. Both IEVer and TEVer processes
are instantly triggered (i.e. at each time t) to cope
with false energy information. IEVer cannot address,
alone, to the whole energy verification problem since
the vehicle’s behavior may evolve over time (e.g.
send/no − send/send behavior). Accordingly, the
TEVer is required to verify that the vehicle, always,
behaves properly throughout the lane.
To accomplish the IEVer and TEVer, we use the
fuzzy logic theory so as to evaluate the similarity
level between each input and the corresponding me-
dian value. We state that the use of the median strat-
egy can better reflect the energy trust than the mean
strategy. Actually, this latter may distinctly deviate
if malicious vehicles provide wrong information that
extensively differs from real information. In fact, the
median is a commonly used strategy in statistics and
probability theory (Cadenas et al., 2012). It depends
on the sample size as well as the reported values (e.g.
energy consumption). Accordingly, the establishment
of fuzzy classes, for each input, is strongly related to
the estimation of the median value. We should also
underline that fuzzy classes are dynamically estab-
lished to deal with the specifications of each road type
(highway, urban zone, etc.) as well as the traffic den-
sity.
IEVer: Instant Energy Verification. Initially, the
server checks the coincidence between the reported
energy consumption and the speed variation between
two instants t-1 and t. Therefore, if an electric ve-
hicle EV
i
accelerates or decelerates and the reported
energy is negative or positive respectively then, EV
i
is
classified as malicious. However, only based on the
coincidence between the speed variation and the sign
of energy, we cannot ensure that the reported energy
is absolutely accurate since a malicious EV may lie
about the amount of the consumed/ recovered energy.
For example, a vehicle may accelerate a little bit but,
it indicates that it consumes a high amount of energy
that mismatch with its acceleration rate. Therefore,
we use the fuzzy logic to deal with such situation and
decide whether the reported energy is appropriate or
not. The process for the IEVer is given in Algorithm
1.
In this study, we consider the coincidence be-
tween: (1) the Acceleration (A) and the Consumed
Energy (CE) where A and CE are positive, and (2)
Fuzzy Logic based Model for Energy Consumption Trust Estimation in Electric Vehicular Networks
225
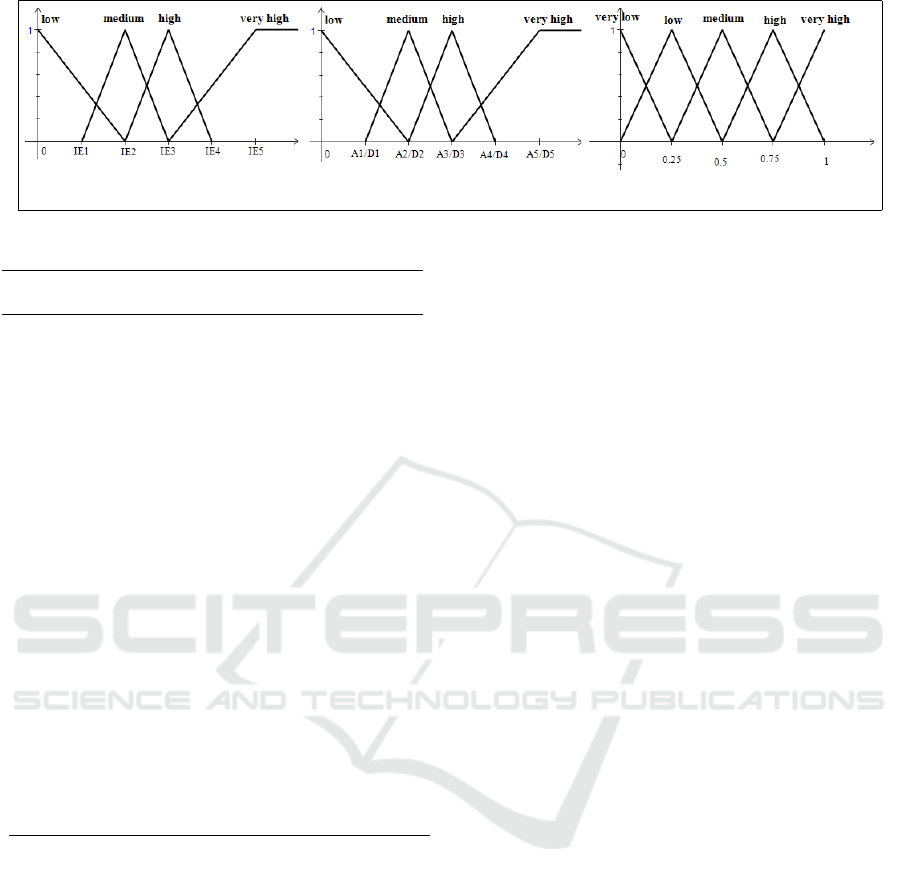
Input variable 'Instant Energy (IE)'
Input variable 'Acceleration/
Deceleration (A/D)'
Output variable 'Instant Energy Trust'
Figure 3: Fuzzy classes and membership functions for IEVer.
Algorithm 1: Detect untrustworthy messages in regard
to Instant Energy.
for each received message m at time t do % m is trusted in regard
to the speed
1. Verify the coincidence between the speed variation and the sign
of energy
Extract the speed (S
t−1
) and (S
t
) at time t-1 and t
Extract the instant energy consumption (IE) between t-1 and t
if ((S
t
)-(S
t−1
)≥0) then % Vehicle accelerates
if (IE ≥0) then m is probably trustworthy % Vehicle consumes energy
else m is untrustworthy
end if
else % Vehicle decelerates
if (IE ≥0) then m is untrustworthy
else m is probably trustworthy % Vehicle recovers energy
end if
end if
2. Apply the fuzzy logic to identify the untrustworthy messages
Determine the median Consumed/ Recovered Energy and the corre-
sponding Acceleration/ Deceleration rate
Build the Fuzzy Classes (FCs) and membership functions (refer to Fig-
ure 3)
Build the rule base (refer to Table 1)
Apply the defuzzification method
if (Trust(IE)≥Threshold) then m is trustworthy
else m is untrustworthy
end if
end for
the Deceleration (D) and the Recovered Energy (RE)
where D and RE are negative. Indeed, in electric
vehicular networks, EVs are designed to recover en-
ergy whenever the vehicle decelerates or goes down-
hill. Therefore, in our model, we create two Fuzzy
Inference Systems (FIS). The first FIS is dedicated to
check the reliability of CE while the second one is in-
terested in the trust evaluation of RE. However, we
suppose that the Instant Energy (IE) for CE and RE
can be both modeled similarly (IE{CE} =
|
IE{RE}
|
)
as shown in Figure 3. As well, both A and D can be
represented in the same figure (A =
|
D
|
). Accordingly,
our FIS considers the acceleration/ deceleration and
the instant consumed/ recovered energy as the sys-
tem’s inputs and the instant energy trust as the output.
We suppose that Fuzzy Classes (FCs) are dynami-
cally established according to the traffic state. In fact,
FCs for IE depend on the median energy value as de-
scribed below:
FC1 : [0, 0, IE
2
]
FC2 : [IE
1
, IE
2
, IE
3
] IE
1
= IE
2
/2
IE
3
= IE
1
+ IE
2
FC3 : [IE
2
, IE
3
, IE
4
] IE
4
= 2 ∗ IE
2
FC4 : [IE
3
, IE
5
, + ∞, + ∞[ IE
5
= IE
4
+ IE
1
IE
2
refers to the median consumed/ recovered
energy at time t. Regarding the fuzzy classes for
A/D, they are determined in correspondence with
the identified classes for IE. Particularly, for each
IE
i
{CE/RE} value, our solution identify the conve-
nient A
i
/D
i
rate as depicted in Figure 3.
Based on the used inputs, we propose the rule ta-
ble (Table 1) that includes sixteen rules. This value
depends on the number of the inputs (two inputs) and
the corresponding fuzzy sets (four fuzzy sets for each
input: low, medium, high, very high). Table 1 repre-
sents the correlation between the inputs and the out-
put. It illustrates that A/D should be proportional to
IE{CE/RE}. For example, if the consumed/ recov-
ered energy is below the computed median value IE
2
,
then the vehicle’s acceleration/ deceleration should
not exceed A
2
/D
2
.
Algorithm 1 shows that if the computed trust value
is below a defined threshold, then the message will be
discarded. Therefore, only trustworthy messages in
regard to instant energy will be handled in the next
step. We highlight that, although the IEVer allows
the detection of wrong energy information, EVs may
launch other kinds of threats that cannot be supported
by the IEVer alone. Next, we show the need of the
TEVer to detect the bush telegraph, on-off and selec-
tive forwarding attacks in order to enhance the quality
of the provided services.
TEVer: Total Energy Verification. TEVer aims at
ensuring that EVs have not lied at all. Therefore, only
the most appropriate total energy consumption is con-
sidered by the server. Algorithm 2 is adopted to mea-
sure the trust in the total energy consumption by each
SECRYPT 2018 - International Conference on Security and Cryptography
226
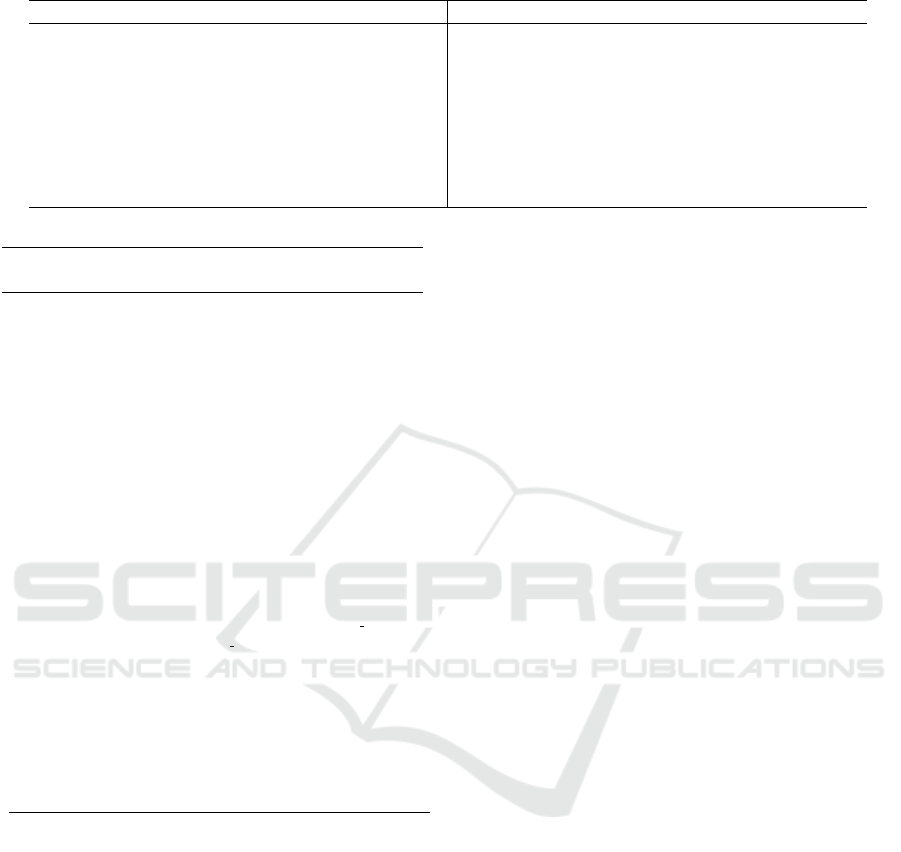
Table 1: Fuzzy rules for IEVer.
Rule Input A/D Input IE Output Trust(IE) Rule Input A/D Input IE Output Trust(IE)
1 low low very high 9 high low very Low
2 low medium high 10 high medium medium
3 low high low 11 high high very high
4 low very high very low 12 high very high medium
5 medium low high 13 very high low very low
6 medium medium very high 14 very high medium low
7 medium high medium 15 very high high medium
8 medium very high very low 16 very high very high high
Algorithm 2: Detect untrustworthy messages in regard
to Total Energy.
for each received message m at time t do % m is trusted in
regard to IE
Extract the speed (S
t
) at time t
Extract the energy consumption (E
t
) between t-1 and t
if (laneID
t−1
==laneID
t
) then % Vehicle still belongs to the
same lane
AS
t
=(nAS
t−1
+S
t
)/(n + 1) % Update the average speed
T E
t
=T E
t−1
+E
t
% Update the total energy
consumption
else % Vehicle moves to a new lane
AS
t
=S
t
% Initialize the average speed
T E
t
=E
t
% Initialize the total energy
consumption
end if
Extract the coordinates of the involved lane (X
min
, X
max
)
% X
min
refers to the start abscissa and X
max
refers to the end abscissa
Determine the median of the Total Energy Consumption (TE
Med) and
the corresponding Average speed (AS Med)
Build the Fuzzy Classes (FCs) and membership functions (refer to Fig-
ure 4)
Build the rule base (refer to Table 2)
Apply the defuzzification method
if (Trust(TE)≥Threshold) then m is trustworthy
else m is untrustworthy
end if
end for
EV throughout a specific lane.
In this study, the proposed FIS for TEVer takes
three inputs into consideration: (1) the vehicle’s posi-
tion in regard to the lane (Pos
lane
), the average speed
(AS), and the total energy consumption (T E). The
output of this FIS is the total energy trust (Trust(T E)).
Regarding the Pos
lane
, the range is between X
min
and
X
max
that, respectively, refer to the starting and ending
abscissa. FCs for Pos
lane
are described as follows:
FC1 : [X
min
, X
min
, X
2
] X
2
= (3/4)X
3
FC2 : [X
1
, X
2
, X
4
] X
1
= (1/4)X
3
X
4
= X
1
+ X
3
FC3 : [X
2
, X
4
, X
5
] X
5
= X
2
+ X
3
FC4 : [X
4
, X
4
, X
max
]
X
3
= (X
max
-X
min
)/2 is the basis of the FCs estab-
lishment for the parameter Pos
lane
. It refers to the
midpoint of the lane and it depends on its length. In
regard to T E, the range is between 0 and +∞. FCs
are defined as follows:
FC1 : [0, 0, T E
1
] T E
1
= T E
2
/2
FC2 : [0, T E
1
, T E
2
]
FC3 : [T E
1
, T E
2
, T E
3
] T E
3
= T E
1
+ T E
2
FC4 : [T E
2
, T E
3
, T E
4
] T E
4
= 2 ∗ T E
2
FC5 : [T E
3
, T E
4
, T E
5
] T E
5
= T E
1
+ T E
4
T E
2
is the median value for the total energy con-
sumption. It represents the basis of the specification
of FCs. If T E exceeds the value T E
5
, then T E will
be directly rejected. Regarding the AS range, it varies
from the minimum to the maximum reported speed.
For the sake of simplicity, we suppose that the maxi-
mum range tends to infinity (+∞). We should remind
that only trusted messages in terms of speed infor-
mation are considered in the TEVer process. Fuzzy
classes for AS are dependent upon the median value
for TE
2
. That is to say that, after the estimation of the
median value for TE, we can identify its equivalent in
terms of AS. Therefore, the proposed FCs for AS can
be described as below:
FC1 : [AS
min
, AS
min
, AS
2
]
FC2 : [AS
1
, AS
2
, AS
3
] AS
1
= AS
min
+
[(AS
2
− AS
min
)/2]
AS
3
= AS
1
+ AS
2
FC3 : [AS
2
, AS
4
, + ∞, + ∞[ AS
4
= 2 ∗ AS
2
AS
min
refers to the minimum followed speed at the
involved lane while AS
2
is the equivalent speed to the
median T E (i.e. T E
2
). For example, we suppose that
a set of vehicles are dispersed throughout a specific
lane. Therefore, if a vehicle runs with AS
2
then, it
usually consumes around T E
2
whenever it reaches a
particular position in the lane (near to X
3
). Table 2 il-
lustrates the dependencies between the suggested pa-
rameters (Pos
lane
, AS, T E and Trust(TE)). This ta-
ble shows that T E should be proportional to AS and
Pos
lane
. Actually, our study considers the vehicle’s
position into consideration since it can provide addi-
tional information about the reliability of the energy
consumption. For example, two vehicles EV
1
and EV
2
Fuzzy Logic based Model for Energy Consumption Trust Estimation in Electric Vehicular Networks
227
Input variable "Pos_lane"
Input variable "Total Energy (TE)"
Output variable "Total Energy Trust"
Input variable "Average Speed (AS)"
Figure 4: Fuzzy classes and membership functions for TEVer.
follow the same lane. EV
1
is still in the beginning
of the lane while EV
2
, almost, reaches the end of the
same lane. Therefore, EV
1
and EV
2
should not con-
sume the same amount of energy although they run
with the same average speed.
In brief, the proposed fuzzy-based trust model
consists of two main phases (IEVer and TEVer) to
enable the server to filter the inappropriate energy-
related information. In each phase, we use fuzzy logic
to detect wrong energy information that mismatches
with the vehicle’s behavior in terms of acceleration/
deceleration rate and average speed. In the next sec-
tion, we evaluate the performance of the proposed
model versus several kinds of threats.
6 PERFORMANCE EVALUATION
In this section, the performance of the proposed
fuzzy-based trust model is evaluated in regard to
the consistency of the energy consumption. Accord-
ingly, we are interested in the energy-related threats as
shown in Figure 2. Therefore, we mainly focus on the
fake information, bush telegraph, selective forward-
ing, on-off and collusion attacks. We use MAT LAB to
create a fuzzy-based inference engine and SU MO to
generate traffic data (Krajzewicz et al., 2006). SUMO
provides a set of files that include information related
to each vehicle in every simulation time step such as
the vehicle’s ID, the consumed energy between two
time steps, the actual battery capacity, the speed, etc.
In our simulation, we suppose that the length of the
lane segment is equal to 2000m. We also conduct
simulations for 100s where each step takes around 1s.
Regarding the number of vehicles, it varies from n=10
to n=100. Finally, we set the threshold to the neutral
value 0.5 (i.e. if the trust value is below 0.5 then the
message is suspicious otherwise, it is trustworthy).
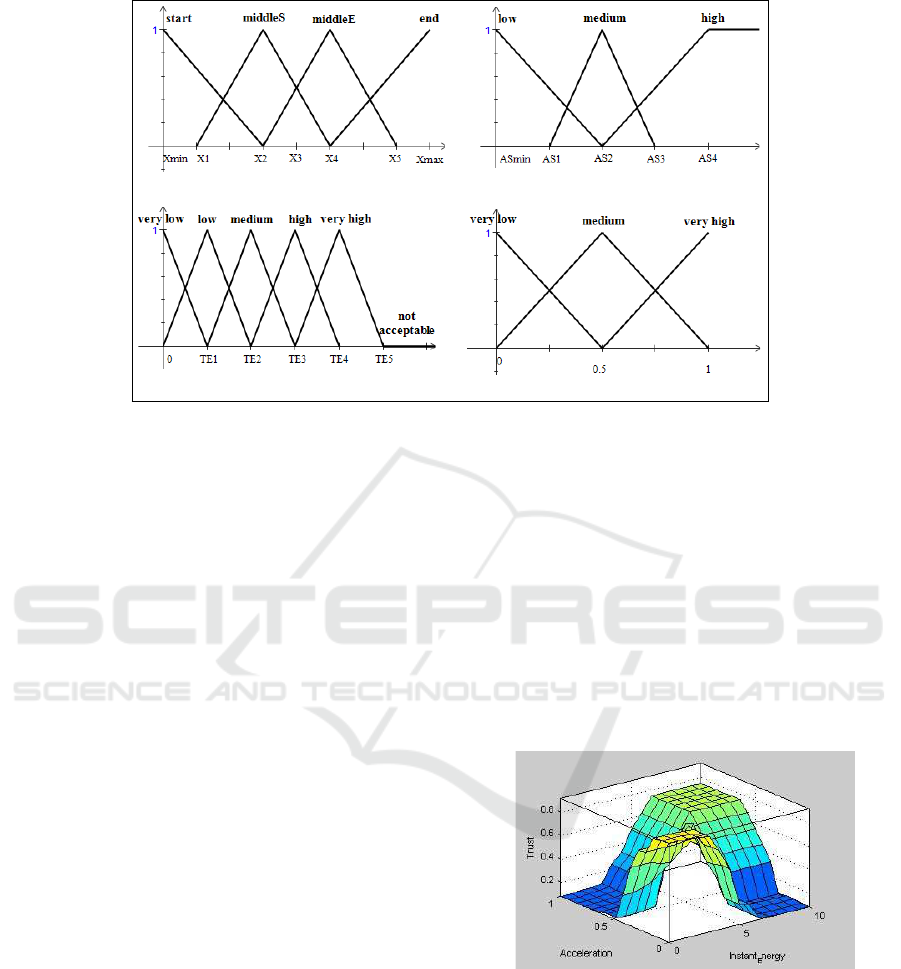
Figure 5 illustrates the correlation between the in-
puts (A and IE) and output (Trust(IE)). We suppose
that A and IE vary from 0m/s
−2
to 1m/s
−2
and from
0W to 10W , respectively. We also suppose that the
median value for IE is equal to 4W and the corre-
sponding acceleration is equal to 0.3m/s
−2
. Accord-
ingly, Figure 5 shows that trust increases whenever A
and IE are proportional.
Figure 5: Correlation between inputs and output for IEVer.
We notice that, if A and IE vary from 0m/s
−2
to 0.5m/s
−2
and from 0W to 6W respectively, then
trust is increasingly high. However, if A is between
0.5m/s
−2
and 1m/s
−2
, and IE is between 0W and
4W , then trust is between 0.08 and 0.25. There-
fore, the more the EV accelerates, the higher the IE
should be and, subsequently, the more the Trust(IE)
increases.
Figure 6 depicts the correlation between the inputs
(Pos
lane
AS and T E) and output (Trust(T E)). This
SECRYPT 2018 - International Conference on Security and Cryptography
228

Table 2: Fuzzy rules for TEVer.
Rule Input
Pos
lane
Input AS Input T E Output
Trust(TE)
Rule Input
Pos
lane
Input AS Input T E Output
Trust(TE)
1 start low very low high 31 middleE low very low low
2 start low low medium 32 middleE low low low
3 start low medium low 33 middleE low medium high
4 start low high low 34 middleE low high medium
5 start low very high low 35 middleE low very high low
6 start medium very low medium 36 middleE medium very low low
7 start medium low high 37 middleE medium low low
8 start medium medium low 38 middleE medium medium medium
9 start medium high low 39 middleE medium high high
10 start medium very high low 40 middleE medium very high low
11 start high very low low 41 middleE high very low low
12 start high low high 42 middleE high low low
13 start high medium medium 43 middleE high medium medium
14 start high high low 44 middleE high high high
15 start high very high low 45 middleE high very high low
16 middleS low very low medium 46 end low very low low
17 middleS low low high 47 end low low low
18 middleS low medium low 48 end low medium medium
19 middleS low high low 49 end low high high
20 middleS low very high low 50 end low very high low
21 middleS medium very low low 51 end medium very low low
22 middleS medium low high 52 end medium low low
23 middleS medium medium medium 53 end medium medium low
24 middleS medium high low 54 end medium high high
25 middleS medium very high low 55 end medium very high medium
26 middleS high very low low 56 end high very low low
27 middleS high low medium 57 end high low low
28 middleS high medium high 58 end high medium low
29 middleS high high low 59 end high high medium
30 middleS high very high low 60 end high very high high
Figure 6: Correlation between inputs and output for TEVer.
figure shows that AS and T E vary from 30km/h to
100km/h and from 0W to 50W , respectively. We sup-
pose that the median value for T E is equal to 20W and
the corresponding AS is equal to 60km/h. We further
suppose that the vehicle almost reaches the end of the
lane (Poslane=1900m).
Accordingly, whenever the vehicle reaches the
end of the lane, then trust seems to be high (around
0.82) only if AS and T E are proportional. For exam-
ple, we notice that if AS is between 30km/h (ASmin)
and 100km/h (ASmax) and T E between 0W and 30W
then trust does not exceed 0.4 since the EV is in the
end of the lane (Pos
lane
=1900m). However, in regard
to the same position, if AS and T E vary from 75km/h
to 100km/h and from 40W to 50W respectively, then
trust can reach 0.83. Nevertheless, if T E exceeds
50W then, trust decreases regardless the AS.
We perform a series of experiments for different
percentages of false messages (P=10%, 25%, 40%)
and with/without collusion attack to evaluate the pre-
cision of the proposed IEVer solution as illustrated in
Figure 7. We should also highlight that false readings
are randomly generated. Simulation results show that
IEVer performs well to detect the misbehaving enti-
ties that provide wrong energy information that mis-
Fuzzy Logic based Model for Energy Consumption Trust Estimation in Electric Vehicular Networks
229

matches with their acceleration or deceleration rate.
Viewed from Figure 7, it is obvious that the IEVer
resists to the false data injection attack with/without
collusion and achieves a high precision regardless the
number of vehicles that belong to the same lane.
Moreover, we notice that the detection of the col-
lusion attack is achieved with higher precision com-
pared with the absence of such attack since all of bad
entities collude to provide similar wrong energy in-
formation (i.e. very low/ very high energy consump-
tion). That is to say that some vehicles, that consume
a small/big amount of energy, collude to convince the
server that they consume a big/small amount of en-
ergy, respectively. In such situation, these entities can
be detected with a high precision that usually reaches
98%. In the second instance (i.e. without collusion),
each vehicle independently lies about its energy. In
this case, the detection of bad entities is reduced a
little bit due to the dynamicity of fuzzy classes. We
also notice that the detection of false data injection at-
tack is moderately accomplished with around 87% (if
n=10 and P=40%) and 90% (if n=100 and P=40%)
since the rate of wrong messages has lower impact on
the selection of the median energy in high traffic den-
sity compared with in low traffic density.
However, the IEVer cannot resist to the bad enti-
ties that: (1) consume high amount of energy but they
pretend that they consume much more, (2) attribute a
slight modification of their real energy consumption
(i.e. Bush telegraph) in each time step or, (3) selec-
tively forward their energy consumption (i.e. selec-
tive forwarding or on-off). To overcome these lim-
itations, we propose to evaluate the accuracy of the
overall energy consumption (TEVer).
Figure 8 shows that TEVer is effective to over-
come these limitations. First, we should underline
that the more the vehicle is approaching to the end of
the lane, the better the detection of malicious nodes.
In Figure 8 we conduct different experiments to prove
that TEVer deals with the On-off attack in different
scenarios: (1) send/send/no − send, (2) send/no −
send/send and (3) no − send/no − send/send. Ac-
cording to Figure 8, it is obvious that TEVer allows
the detection of the on-off attack with high precision,
especially for the case no − send/no − send/send
(higher than 92%). In this case, the detection of such
attack is very effective since the total consumed en-
ergy is very low compared with the expected one.
Hence, the more the vehicle behaves improperly, the
higher the precision. Moreover, we notice that when-
ever the traffic density increases (n=100 and P=40%),
the precision increases simultaneously compared with
in low traffic density (n=10 and P=40%). This can
be explained by the fact that, for the same percentage
of malicious vehicles, the identification of the median
total energy consumption is more accurate in high
traffic density than low traffic density. Similarly, we
believe that TEVer is effective to deal with the selec-
tive forwarding attack since it almost behaves like the
on-off attack.
Regarding the bush telegraph attack, we perform
multiple experiments with different α values as de-
picted in Figure 9. α refers to the variation rate of
the real consumed energy that can increase (+α) or
decrease (-α). Indeed, TEVer is more effective with
the bush telegraph attack that provides high energy
information (+α) than the bush telegraph attack that
reduces the real energy consumption (-α) especially
when α=20% and α=30%. Figure 9 shows also that
the more the total energy deviates (i.e. α increases),
the higher the precision. Moreover, we notice that the
detection of this attack is improved whenever the traf-
fic density increases since the number of false mes-
sages has lower effect on the establishment of fuzzy
classes in the second instance (i.e n=100) compared
with the first one (i.e. n=10). Therefore, in regard to
the same percentage of false messages (e.g. P=25%),
we notice that for n=10, the precision is around 50%
and for n=100, the precision reaches 70%.
In summary, we can deduce that the proposed
model for IEVer and TEVer is resilient to multiple
threats in different traffic densities. This model pro-
vides a high protection against the malicious entities
that misbehave due to selfish, malicious and uninten-
tional reasons.
7 CONCLUSION AND FUTURE
WORK
In this paper, a new fuzzy-based trust model was pro-
posed to evaluate the accuracy of the energy infor-
mation reported by electric vehicles. The proposed
solution consists of two main dimensions: the instant
energy verification and total energy verification. The
aims of this model are mainly to (1) filter the wrong
energy information that mismatches with the vehicle’s
behavior (e.g. acceleration and deceleration) and (2)
ensure that only credible and plausible information is
considered to enhance the quality of the provided ser-
vices in electric vehicular networks. Results and anal-
ysis prove the effectiveness of the proposed solution
to detect several kinds of threats, that broadcast wrong
energy information, in different traffic densities. As
future work, we intend to propose a self-adaptive trust
model for electric vehicular networks. The purpose of
this model is to adopt the convenient methodologies
for trust assessment, according to the context and the
SECRYPT 2018 - International Conference on Security and Cryptography
230
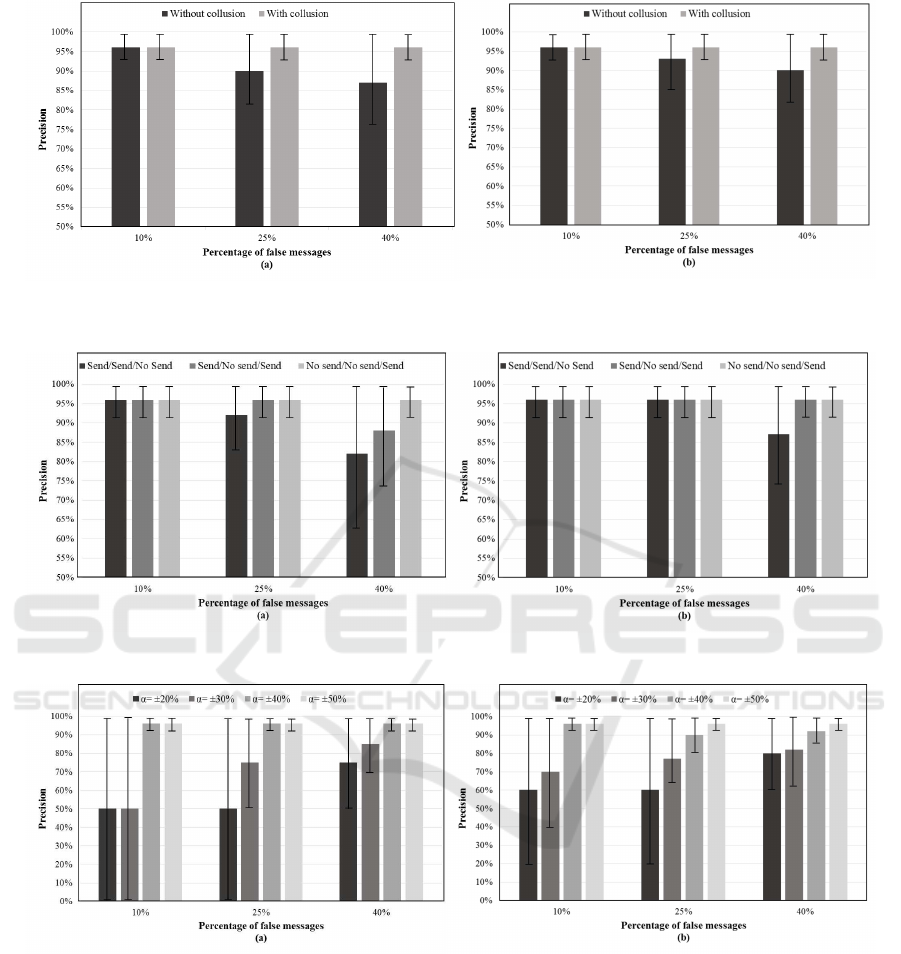
Figure 7: Performance of IEVer versus the false data injection attack (with/without collusion attack). Precision for (a) n=10
and (b) n=100.
Figure 8: Performance of TEVer versus the On-off attack. Precision for (a) n=10 and (b) n=100.
Figure 9: Performance of TEVer versus the Bush Telegraph attack. Precision for (a) n=10 and (b) n=100.
characteristics of the provided applications. ACKNOWLEDGEMENTS
This work was supported by the PHC Utique pro-
gram of the French Ministry of Foreign Affairs and
Ministry of higher education and research and the
Tunisian Ministry of higher education and scientific
research in the CMCU project number 16G1404.
Fuzzy Logic based Model for Energy Consumption Trust Estimation in Electric Vehicular Networks
231

REFERENCES
Al-Kahtani, M. S. (2012). Survey on security attacks in ve-
hicular ad hoc networks (vanets). In Signal Process-
ing and Communication Systems (ICSPCS), 2012 6th
International Conference on, pages 1–9. IEEE.
Alam, K. M., Saini, M., and El Saddik, A. (2015). Toward
social internet of vehicles: Concept, architecture, and
applications. IEEE Access, 3:343–357.
Badin, F., Le Berr, F., Briki, H., Dabadie, J., Petit, M., Ma-
gand, S., and Condemine, E. (2013). Evaluation of
evs energy consumption influencing factors, driving
conditions, auxiliaries use, driver’s aggressiveness. In
Electric Vehicle Symposium and Exhibition (EVS27),
2013 World, pages 1–12. IEEE.
Bayram, I. S. and Papapanagiotou, I. (2014). A survey on
communication technologies and requirements for in-
ternet of electric vehicles. EURASIP Journal on Wire-
less Communications and Networking, 2014(1):223.
Cadenas, J., Megson, G. M., Sherratt, R., and Huerta, P.
(2012). Fast median calculation method. Electronics
letters, 48(10):558–560.
Dahmane, S., Kerrache, C. A., Lagraa, N., and Lorenz, P.
(2017). Weistars: A weighted trust-aware relay se-
lection scheme for vanet. In Communications (ICC),
2017 IEEE International Conference on, pages 1–6.
IEEE.
Falk, R. and Fries, S. (2012). Electric vehicle charging
infrastructure security considerations and approaches.
Proc. of INTERNET, pages 58–64.
Hu, H., Lu, R., and Zhang, Z. (2015). Vtrust: a robust
trust framework for relay selection in hybrid vehicular
communications. In Global Communications Confer-
ence (GLOBECOM), 2015 IEEE, pages 1–6. IEEE.
Klir, G. and Yuan, B. (1995). Fuzzy sets and fuzzy logic,
volume 4. Prentice hall New Jersey.
Krajzewicz, D., Bonert, M., and Wagner, P. (2006).
The open source traffic simulation package sumo.
RoboCup 2006.
Li, W. and Song, H. (2016). Art: An attack-resistant trust
management scheme for securing vehicular ad hoc
networks. IEEE Transactions on Intelligent Trans-
portation Systems, 17(4):960–969.
M
´
armol, F. G. and P
´
erez, G. M. (2012). Trip, a trust and
reputation infrastructure-based proposal for vehicular
ad hoc networks. Journal of Network and Computer
Applications, 35(3):934–941.
Mazilu, S., Teler, M., and Dobre, C. (2011). Securing ve-
hicular networks based on data-trust computation. In
P2P, Parallel, Grid, Cloud and Internet Computing
(3PGCIC), 2011 International Conference on, pages
51–58. IEEE.
Oluoch, J. O. (2015). A unified framework for trust manage-
ment in Vehicular Ad Hoc Networks (VANET). PhD
thesis, Oakland University.
Raya, M., Papadimitratos, P., Gligor, V. D., and Hubaux,
J.-P. (2008). On data-centric trust establishment in
ephemeral ad hoc networks. In INFOCOM 2008.
The 27th Conference on Computer Communications.
IEEE, pages 1238–1246. IEEE.
Saade, J. J. and Diab, H. B. (2004). Defuzzification methods
and new techniques for fuzzy controllers.
Soleymani, S. A., Abdullah, A. H., Hassan, W. H., Anisi,
M. H., Goudarzi, S., Baee, M. A. R., and Man-
dala, S. (2015). Trust management in vehicular ad
hoc network: a systematic review. EURASIP Jour-
nal on Wireless Communications and Networking,
2015(1):146.
Soleymani, S. A., Abdullah, A. H., Zareei, M., Anisi, M. H.,
Vargas-Rosales, C., Khan, M. K., and Goudarzi, S.
(2017). A secure trust model based on fuzzy logic in
vehicular ad hoc networks with fog computing. IEEE
Access, 5:15619–15629.
Soni, S., Sharma, K., and Chaurasia, B. K. (2015). Trust
based scheme for location finding in vanets. In Ad-
vances in Optical Science and Engineering, pages
425–432. Springer.
Sumra, I. A., Hasbullah, H. B., and AbManan, J.-l. B.
(2015). Attacks on security goals (confidentiality, in-
tegrity, availability) in vanet: a survey. In Vehicu-
lar Ad-Hoc Networks for Smart Cities, pages 51–61.
Springer.
Sun, S.-h., Hu, J.-l., Peng, Y., Pan, X.-m., Zhao, L., and
Fang, J.-y. (2016). Support for vehicle-to-everything
services based on lte. IEEE Wireless Communications,
23(3):4–8.
Wang, C.-X., Haider, F., Gao, X., You, X.-H., Yang,
Y., Yuan, D., Aggoune, H., Haas, H., Fletcher, S.,
and Hepsaydir, E. (2014). Cellular architecture and
key technologies for 5g wireless communication net-
works. IEEE Communications Magazine, 52(2):122–
130.
Wei, Z., Yu, F. R., and Boukerche, A. (2014). Trust based
security enhancements for vehicular ad hocnetworks.
In Proceedings of the fourth ACM international sym-
posium on Development and analysis of intelligent ve-
hicular networks and applications, pages 103–109.
ACM.
Yang, N. (2013). A similarity based trust and reputa-
tion management framework for vanets. International
Journal of Future Generation Communication and
Networking, 6(2):25–34.
Yao, X., Zhang, X., Ning, H., and Li, P. (2017a). Using trust
model to ensure reliable data acquisition in vanets. Ad
Hoc Networks, 55:107–118.
Yao, Y., Xiao, B., Wu, G., Liu, X., Yu, Z., Zhang, K., and
Zhou, X. (2017b). Voiceprint: A novel sybil attack
detection method based on rssi for vanets. In Depend-
able Systems and Networks (DSN), 2017 47th Annual
IEEE/IFIP International Conference on, pages 591–
602. IEEE.
Zadeh, L. A. (2004). A note on web intelligence, world
knowledge and fuzzy logic. Data & Knowledge Engi-
neering, 50(3):291–304.
Zaidi, K., Milojevic, M., Rakocevic, V., and Rajarajan, M.
(2014). Data-centric rogue node detection in vanets.
In Trust, Security and Privacy in Computing and
Communications (TrustCom), 2014 IEEE 13th Inter-
national Conference on, pages 398–405. IEEE.
SECRYPT 2018 - International Conference on Security and Cryptography
232

Zhang, J. (2011). A survey on trust management for
vanets. In Advanced information networking and ap-
plications (AINA), 2011 IEEE international confer-
ence on, pages 105–112. IEEE.
Fuzzy Logic based Model for Energy Consumption Trust Estimation in Electric Vehicular Networks
233
