
Water Asset Management Strategy based on Predictive Rainfall/Runoff
Model to Optimize the Evacuation of Water to the Sea
Baya Hadid and Eric Duviella
Institut Mines Telecom Lille Douai, Univ. Lille, France
Keywords:
Modelling, Water Management, Rainfall/Runoff Model, Optimization, Large Scale Systems, Water System.
Abstract:
Hydrographical networks are large scale systems that are used to answer to the Human uses. They are impacted
by extreme events that should be bigger due to climate change. By focusing on extreme rainy events, the
amount of water in excess has to be dispatched on all the network to avoid flood, and then rejected to the sea
heeding the tides. Pumps can also be used to reject the water to the sea but they lead to big operating cost. To
deal with this challenging issue, the modelling tools and the water asset management strategies that have been
recently proposed are adapted and improved in this paper. They consist in an integrated model, a flow-based
network and a quadratic optimization based on constrains. The efficiency of this water management strategy
requires an accurate predictive rainfall/runoff model. It is highlighted by considering a realistic case study that
is also used to describe all the methodology step.
1 INTRODUCTION
Transport via inland waterways benefits of econo-
mic and environmental advantages (Kara et al., 2015;
Mihic et al., 1993; Mallidis et al., 2012; Brand
et al., 2012). However, the inland waterways will
be strongly impacted by climate hazards (Koetse and
Rietveld, 2009; EnviCom, 2008; IWAC, 2009). It is
confirmed by the studies in (Arkell and Darch, 2006),
(Wang et al., 2007) and (Jonkeren et al., 2007) that fo-
cus on inland waterways in UK, in China and on the
Rhine respectively. The frequency and intensity of
future flood events are expected higher (Bates et al.,
2008; Bo
´
e et al., 2009; Ducharne et al., 2010). To
deal with the management of inland waterways in a
climate change context, a multi-scale management ar-
chitecture has been proposed in (Duviella et al., 2013)
and developed in (Nouasse et al., 2016b), allowing the
use of modelling approaches and management stra-
tegies for water level control (Segovia et al., 2017;
Horv
`
ath et al., 2014b; Horv
`
ath et al., 2015a; Horv
`
ath
et al., 2015b; Rajaoarisoa et al., 2014), and water vo-
lume allocation (Nouasse et al., 2015; Nouasse et al.,
2016a). However, it has been shown that even if it
is possible to control the hydraulic structures with ef-
ficiency by considering a deterministic problem, un-
controlled intakes and withdrawals have a strong in-
fluence on this optimization. It is particularly the case
for rainy events that have big influence on inland wa-
terways. Moreover, inland waterways with outlet to
the sea have not been considered. This implies a new
challenging issue that requires to take into account the
effect of the tide and the electrical cost of the pumps
during the design of the water management strategies.
The management strategy that consists in an opti-
mal adaptive allocation planning of water resource is
adapted and improved in this paper by dealing with
inland waterways with outlet to the sea. The influ-
ence of the tide has taken into account. A criterion
to minimize is defined based on the configuration of
the inland waterways, the priorities on water inta-
kes and withdrawals, the management objectives, the
tide and the predicted volumes that come from rainy
events. The requirement of an accurate prediction of
the amount of water volumes that comes from rain is
highlighted by considering a realistic case study.
The modelling tools and the optimal allocation
planning approach are described in the first section.
In the second section, a state of the art of existing pre-
dictive rainfall/runoff models is presented. Then, a
case study allows illustrating all the step to implement
the designed tools and strategy is proposed in the third
section. This case study is used to highlight the im-
portance of the rainfall/runoff models during the opti-
mization of the water resource planning.
76
Hadid, B. and Duviella, E.
Water Asset Management Strategy based on Predictive Rainfall/Runoff Model to Optimize the Evacuation of Water to the Sea.
DOI: 10.5220/0006866500760085
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 1, pages 76-85
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
2 WATER ASSET MANAGEMENT
STRATEGY
2.1 Integrated Model
An integrated model that is linked with a flow-based
network has been proposed in (Nouasse et al., 2016b)
to deal with inland navigation networks. It aims at
modelling the dynamics of each Navigation Reach
(NR), i.e. a part of the canal located between two
locks, as a tank with a sample time of several hours. It
allows taking into account all the inputs and outputs,
controlled or not, of each NR. For inland waterways
with links to the sea, it is necessary to define a new
element representing the output of the integrated mo-
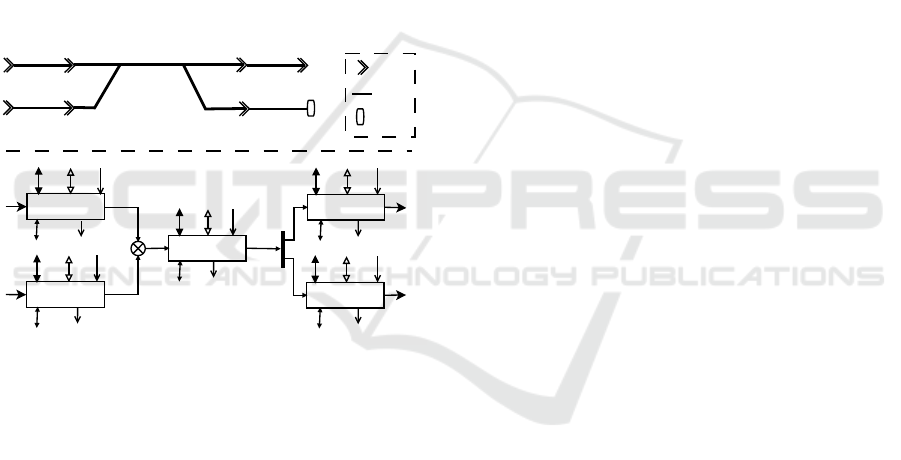
del. The model consists in considering a finite number
η of interconnected NR that are linked following the
configuration of the network (see Figure 1.a). Each
NR is numbered and denoted NR
i
, with i ∈ 1 to η.
(a)
Lock
NR
NR
i-2
NR
i-1
NR
i
NR
i+1
NR
i+2
(b)
NR
i
NR
i-2
NR
i-1
NR
i+1
NR
i+2
V
i
s,c
V
i
e,c
V
i
u
V
i
c
V
i
g,u
V
i-2
s,c
V
i-2
e,c
V
i-2
u
V
i-2
c
V
i-2
g,u
V
i-1
s,c
V
i-1
e,c
V
i-1
u
V
i-1
c
V
i-1
g,u
V
i+1
s,c
V
i+1
e,c
V
i+1
u
V
i+1
c
V
i+1
g,u
V
i+2
s,c
V
i+2
o,c
V
i+2
u
V
i+2
c
V
i+2
g,u
+
+
V
i-2
s,p
V
i-2
e,p
V
i-1
s,p
V
i-1
e,p
V
i
s,p
V
i
e,p
V
i+1
s,p
V
i+1
e,p
V
i+2
s,p
V
i+2
e,p
Outlet
Figure 1: (a) Inland navigation network, (b) corresponding
model.
Each NR
i
is supplied and emptied by control-
led water volumes from locks, controlled gates and
pumps when they are available, and by uncontrolled
water volumes from water intakes, rain, or exchan-
ges with groundwater. Moreover, the network can be
emptied thanks to the outlets to the sea. The set of
controlled water volumes is:
1. controlled volumes from one or several upstream
NR that supply NR
i
, denoted V
s,c
i
(s: supply, c:
controlled),
2. controlled volumes from NR
i
that empty it, deno-
ted V
e,c
i
(e: empty),
3. controlled volumes from water intakes that sup-
ply or empty NR
i
, denoted V
c
i
. These volumes are
signed; positive if NR
i
is supplied, negative other-
wise,
4. controlled volumes from pump that supply NR
i
,
denoted V
s,p
i
(s: supply, p: pumped),
5. controlled volumes from pump that empty NR
i
,
denoted V
e,p
i
.
6. controlled volumes that empty NR
i
to the sea, de-
noted V
o,c
i
(o: outlet).
The set of uncontrolled water volumes is:
1. uncontrolled volumes from natural rivers, rainfall-
runoff, Human uses, denoted V
u
i
(u: uncontrol-
led). These volumes are signed depending on their
contribution to the volume V
i
(k) in NR
i
.
2. uncontrolled volumes from exchanges with
groundwater, denoted V
g,u
i
(g: groundwater).
These volumes are also signed.
The dynamic volume of NR
i
is computed according to
the set of controlled and uncontrolled water volumes:
V
i
(k) = V
i
(k − 1) +V
s,c
i
(k) −V
e,c
i
(k) +V
c
i
(k) +V
s,p
i
(k)
−V
e,p
i
(k) +V
u
i
(k) +V
g,u
i
(k) − δ
i
V
o,p
i
(k),
(1)
where k corresponds to the current period of time and
k − 1 the last one with T
M
the sample time that corre-
sponds to several hours and δ
i
a variable equal to one
when outlet is available, equal to zero otherwise.
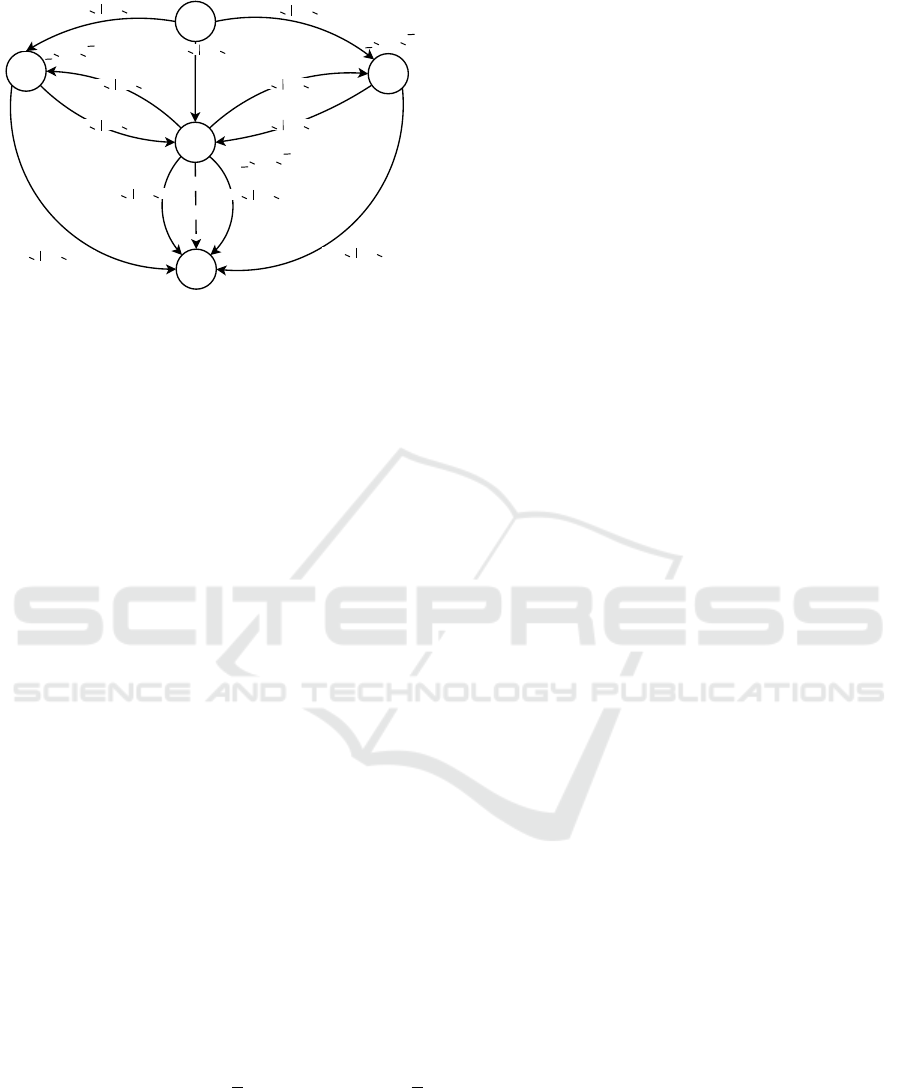
2.2 Flow-based Network
A flow-based network is designed according to the in-
tegrated model as G = (N ,A), where N is the set
of ordered nodes (vertices) and A the set of arcs (di-
rected edges). The set of nodes is composed of a
common source vertex O without incoming edges, a
common sink node without outgoing edges, denoted
S (see Figure 2), and a node for each NR
i
. The total
number of nodes is η = card(N ) + 2.
An arc links two nodes and is defined as a couple
a = (i, j), a ∈ R
α
with α = card(A), where i and j are
the origin and destination node of the edge respecti-
vely. For networks with outlet to the sea, it is neces-
sary to consider several arcs between the correspon-
ding NR and the sink node S. Indeed, the water volu-
mes can be rejected by gravity or thanks to the pumps
with not the same cost. Therefore, these arcs are defi-
ned as couple a
ν
= (i, S), a
ν
∈ R
α
with α = card(A),
where i is the origin node and ν ∈ {1 : m} with m the
number of arcs between these two nodes.
The water volume that is transferred between two
nodes is represented by a flow associated to each arc
a, such as φ
a
(k) = φ
i j
(k) with i and j the indexes of
the nodes. Here again, it is necessary to consider se-
veral flows φ
ν
i S
(k) between the NR
i
and the sink node
S. The exchanged water volumes are limited by phy-
sical characteristics of the hydraulic devices. Hence,
Water Asset Management Strategy based on Predictive Rainfall/Runoff Model to Optimize the Evacuation of Water to the Sea
77
< <
O
S
1
3
2
l (k)< (k)<u (k)
01
01
O
01
l (k)< (k)<u (k)
02
02
O
02
l (k)< (k)<u (k)
31
31
O
31
l (k)< (k)<u (k)
13
13
O
13
l (k)< (k)<u (k)
23
23
O
23
l (k)< (k)<u (k)
2S
2S
O
2Sl (k)< (k)<u (k)
1S
1S
O
1S
d (k)
1
w
(k)
01
w
(k)
31
w
(k)
13
w
(k)
02
w
(k)
23
w
(k)
2S
w
(k)
1S
l (k)< (k)<u (k)
3S
3S
O
3S
w
(k)
3S
l (k)< (k)<u (k)
03
03
O
03
w
(k)
03
32
l (k)< (k)<u (k)
32
32
O
32
w
(k)
d
1
d
1
< <
d (k)
2
d
2
d
2
< <
d (k)
3
d
3
d
3
D (k)
1
D (k)
1
D (k)
1
D (k)
3
D (k)
2
l (k)< (k)<u (k)
3S
3S
O
3S
w
(k)
3S
1
1
1
1
m
m
m
m
Figure 2: Flow graph composed of three NR with one outlet.
dynamical boundary constraints are considered such
as l
i j
(k) ≤ φ
i j
(k) ≤ u
i j
(k), where l
i j
(k) and u
i j
(k)
are the lower and upper bound constraints respecti-
vely; with l
ν
i S
(k) ≤ φ
ν
i S
(k) ≤ u
ν
i S
(k) for the arcs bet-
ween NR
i
and S.
The dynamical cost ω
i j
(k) ∈ R
α
that is associated
to each arc a is denoted ω
ν
i S
(k) for arcs between NR
i
and the outlet to the sea. These costs constant on the
period k, can be different between k and k + 1. They
allow taking into account a smaller cost for an arc that
corresponds to a water transfer by gravity comparing
to an arc that corresponds to a water transfer by pump.
The boundary constraints are computed in volume
([m
3
]) according to the device characteristics (gate,
lock, pump...), the time period T
M
following some ru-
les that are well described in (Duviella et al., 2016).
They have to reflect real behaviour of the inland navi-
gation networks.
Considering the nodes, with the exception of O
and S, a relative objective capacity D
i
(k), with i ∈
N −
{
O,S
}
is assigned to each of them. It is equal
to 0. The current capacity in the node NR
i
, denoted
d
i
(k), has to be equal to D
i
(k). It is computed as:
d
i
(k) = d
i
(k−1)+φ
a
+
(k)−φ
a
−
(k) for i ∈ N −
{
O,S
}
,
(2)
where a
+
is the set of arcs entering the node i, a
−
the
set of arcs leaving the node i, and d
i
(k) the capacity
of the node i for the last period. That means that at
each time the amount of water entering in the node
NR
i
has to be equal to the amount of water leaving
the node. However, an interval around the objective
D
i
(k) is allowed leading to d
i
≤ d
i
(k) ≤
¯
d
i
, with d
i
and
¯
d
i
the lower and upper bound constraints. Then,
the capacity d
i
(k) can be negative or positive. When
d
i
(k) is negative (respectively positive) at time k, NR
i
requires more (resp. less) water at time k + 1. Even
if the objective conditions can not be reached at each
time, the capacities d
i
(k) have to be closest as possible
to their objective. Hence, a dynamical cost function
W
i
((D
i
(k) − d
i
(k))
2
), i ∈ N −
{
O,S
}
is associated to
each capacity d
i
(k). This function aims at penalizing
the gap between the current capacity d
i
(k) and the ob-
jective D
i
(k). Thus, the optimal water management
consists in satisfying the objectives of each node, i.e.
D
i
(k), by optimizing the flows Φ(k) in terms of mi-
nimal cost; the vector Φ(k) contains the set of flows
φ
i j
(k), ∆(k) the set of capacities d
i
(k) at time k.
2.3 Optimal Allocation Planning
The objective of the optimal allocation planning con-
sists in determining the optimal sequence of flows
Φ to guaranty the objectives D
i
(k) (Duviella et al.,
2016). It is based on the minimization of an objective
criterion for each management step:
J
V
(k) =
η
∑
i
W
i
((D
i
(k) − d
i
(k))
2
) +
α
∑
a
ω
a
(k) · φ
a
(k),
(3)
with k the current step time, η the number of nodes
without nodes O and S, and α the number of arcs.
That includes arcs between NR
i
and S, where the cost
is computed as
∑
m
ν=1
ω
ν
i,S
(k) · φ
ν
i,S
(k). Note that the
value of d
i
(k) depends on d
i
(k − 1) and on the flows
φ
a
(k). First terms in equation 3 correspond to the cost
due to the gap between the capacity d
i
(k) and the ob-
jective D
i
. This cost can be expressed as a quadratic
function. Second terms are the cost of each flow.
The quadratic programming method quadprog in
Matlab is used to minimize J
V
(k) under the equality
constraints defined for each flow and each capacity:
min J
V
(k) such that
L
b
(k) ≤ x(k) ≤ U
b
(k)
A.x(k) = b(k)
(4)
with x(k) the vector that is composed of elements of
Φ(k) and ∆(k), L
b
(k) and U
b
(k) the boundary vec-
tors, b(k) ∈ R
η·1
the vector that contains the values
of ∆(k − 1) of the previous period and the matrix
A ∈ R
η·(α+η)
that is composed of 0 or 1 following
the equation 3 and the structure of the flow graph. It
is considered as initial conditions that d
i
(k − 1) = 0
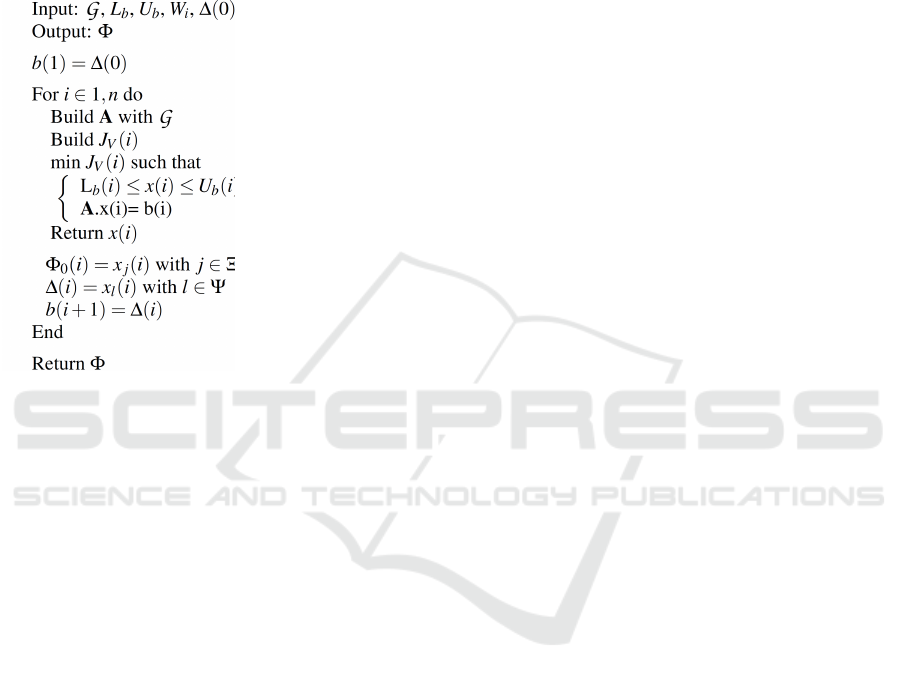
for i ∈ [1,η]. The following algorithm 1 is proposed
to obtain the sequence of optimal flows Φ by mini-
mizing the criterion J
V
(k), n times. In this algorithm,
Ξ ∈ N
α
gathers all the indexes of x(k) that correspond
to the flow φ
a
(k), and Ψ ∈ N
η
the indexes of x(k) that
correspond to the capacities d
i
(k).
This optimization approach leads to the determi-
nation of the optimal sequence of flows. It is well
suitable in a deterministic situation when all the flows
are supposed to be known. But, the uncontrolled wa-
ter volumes are often very difficult to determine with
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
78
accuracy. However, it is possible to estimate their
average values based on real measurements as pro-
posed in (Horv
`
ath et al., 2014a), or based on rain-
fall/runoff models as proposed in (Duviella and Bako,
2012). It will be highlighted that this information will
improve the quality of the proposed optimal water
management. In the next section, a brief state of the
art of predictive rainfall/runoff models is proposed.
Algorithm 1: Optimization algorithm.
3 PREDICTIVE
RAINFALL/RUNOFF MODELS
Rainfall/runoff modelling received considerable at-
tention of many researchers over the past two decades.
This important attention is motivated by the speed up
of the climate change phenomena and their impact on
water resources.
The literature can be classified into two approa-
ches according to the a priori knowledge of the sy-
stem: physical models and data-driven models. The
complexity of the considered system is too important
and then a physical-based/mathematical model could
not be considered because of the huge number of pa-
rameters. Moreover, no theoretical hydrological mo-
del is able to simulate the behavior of a catchment
(Perrin et al., 2003). On the contrary, data-driven,
black box fully numerical modelling approaches es-
tablish models by using only input and output mea-
surements. Many researchers have developed nume-
rical runoff/rainfall models with varying degrees of
success.
Linear models consisting in transfer functions
were firstly used due to their simplicity (Young, 1986;
T
`
oth et al., 2007). These methods have been abando-
ned because of the nonlinearities due to Evapotrans-
piration phenomenon. Consequently, other approa-
ches have emerged such as the neural networks non-
parametric approach (see (Siou et al., 2010) and re-
ferences therein). However, and despite the accep-
table forecasting results, it leads to non-interpretable
parameters. In (Bastin et al., 2009), the nonlinearities
were represented by a Hammerstein structure using
an a priori knowledge of the hydrological system to
characterize the static function which also means that
the achieved model is non replicable due to the diffe-
rences between a geographical location and another.
In (Perrin et al., 2003), a daily lumped rain-
fall/runoff model called GR4J (from the french
“G
´
enie Rural 4 param
`
etres Journaliers”) is presented
as an improvement of the GR3J (Edijatno and Michel,
1989; Edijatno et al., ) and the performance was tes-
ted using five criteria. This lumped model shows to
be a reliable tool since it was used in several case stu-
dies (Bourgin, 2014; Ficchi, 2017; Dakhlaoui et al.,
2017).
More recently, a black box Linear Parameter Va-
rying (LPV) model was investigated for the Rainfall-
Runoff Relationship (RRR) in urban drainage net-
works (Previdi and Lovera, 2009) and rural catchment
(Laurain, 2010). This kind of systems consider that a
lot of nonlinearities and depend on one or several ex-
ternal variables, called scheduling variables, and then
could be linearized at different operating points re-
sulting in a set of local Linear Time-Invariant (LTI)
systems. The issue with this approach comes from
how to choose the right scheduling variable which is
not trivial. In (Previdi and Lovera, 2009), the schedu-
ling variable was chosen as the output of a non pa-
rametric model and the model was identified using
the least-squares algorithm when the scheduling pa-
rameter is taken as the output of the best linear model
in (Laurain, 2010) but the optimal identification Sim-
plified Refined Instrument Variable (SRIV) algorithm
was applied. Both LPV methods lead to acceptable
results. However, in (Duviella and Bako, 2012), the
authors proposed an online recursive nonlinear identi-
fication algorithm applied to Liane river (France) and
was compared to a recursive least-squares linear mo-
del over a future horizon of 24 hours. Indeed, the on-
line estimation allows to track the catchment intrin-
sic variations. The study over a horizon is innova-
tive comparing to the previous cited approaches and
shows that even the Fit score (Ljung, 1999) or the
Nash coefficient (Nash and Sutcliffe, 1970) are good,
the introduction of a prediction horizon deteriorates
the estimation results and then increases the number
of false alarms and missed alarms.
One of these approaches will be used and proba-
Water Asset Management Strategy based on Predictive Rainfall/Runoff Model to Optimize the Evacuation of Water to the Sea
79
bly improved to deal with the prediction of the effects
of rainfall on the amount of water that it will be ne-
cessary to reject to the sea.
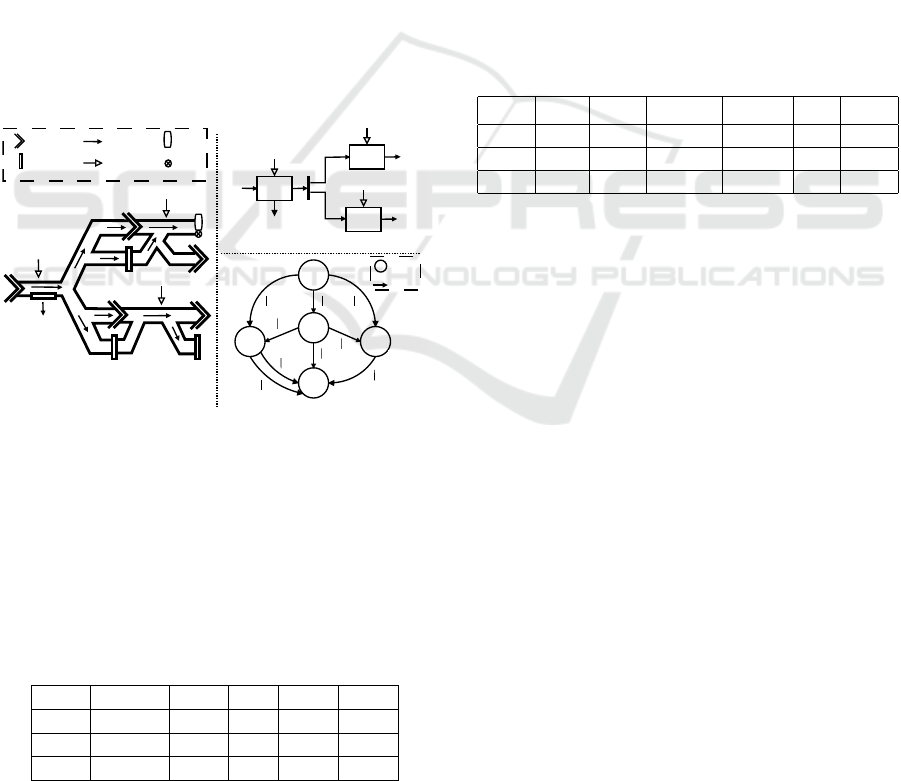
4 CASE STUDY
4.1 Description
The considered case study is based on a real inland na-
vigation network that is located in the north of France.
However, the characteristics of the navigation rea-
ches, locks, pumps and gates are realistic but not real.
It is composed of three NR that are interconnected as
it is depicted in Figure 3.a. The NR
1
supplies with a
controlled gate and a lock the NR
2
. It supplies also
with another controlled gate and lock the NR
3
. The
NR
2
is directly linked to the outlet to the sea, and
with a lock to another NR that is is not considered.
The NR
2
is equipped with a pump downstream that
allows rejecting water to the sea. The NR
3
supplies
another NR that is also not considered in this study.
(a)
Lock
Gate/Dam
NR
2
NR
1
O
S
O
1S
Flow
direction
O
12
NR
3
(c)
NRNR
2
3
O
2S
O
3S
O
13
d (k)
1
d (k)
2
d (k)
3
Uncontrolled
discharge
NR
1
O
O3
O
O1
O
O2
(b)
Arc
Node
NR
1
V
1
s,c
V
1
e,c
V
1
u
V
1
c
NR
2
V
2
s,c
V
2
o,c
V
2
u
NR
3
V
3
s,c
V
3
e,c
V
3
u
Outlet
Pump
O
2S
2
1
Figure 3: (a) Studied network, (b) the integrated volume
model, (c) the flow graph.
The integrated model and the associated flow
graph are depicted in Figures 3.b and .c, respectively.
The characteristics of the system, i.e. dimensions of
the NR and the boundaries on water levels are given
in Table 1.
Table 1: Characteristics of NR, with length L in [km], width
w in [m], depth l in [m] and upper and lower level boundaries
in [m].
L w l l(+) l(−)
NR
1
56.724 41.8 3.7 0.1 0.05
NR
2
42.3 52 4.3 0.05 0.05
NR
3
25.694 45.1 3.3 0.05 0.05
The dimensions of the locks, the operating range
of the gates and the average values of the uncontrolled
discharges are given in Table 2. Notice that the ope-
rating range of Q
c
dw
2
depends on the tide. During low
tide, the discharge due to the gravity corresponds to
Q
c
dw
2
= 30 [m
3
/s]. During high tide, this discharge is
equal to 0. However, the pump can empty NR
2
with
discharge between [0;40] [m
3
/s] whatever is the pe-
riod of the day. That means that the operating range
of Q
c
dw
2
= [0; 70] during low tide and Q
c
dw
2
= [0; 40]
during high tide. Of course the cost of pumping is
higher than the cost of water rejection by gravity. It
is the reason of the consideration of two arcs between
nodes 2 and S (see Figure3.c). The flow φ
1
2,S
repre-
sents all the water volume that is emptied to the NR
2
with the downstream lock and by gravity to the sea.
The flow φ
2
2,S
is dedicated to the water volume that is
pumped to be rejected to the sea.
Table 2: Characteristics of the lock chamber υ
ch
{up;dw}
i
ex-
pressed in 10
3
.[m
3
], gates Q
c
{up;dw}
i
, controlled and un-
controlled inputs Q
c
i
and Q
u
i
; discharges are expressed in
[m
3
/s]. X = nonavailable, and ∗ = depends to the operating
conditions.
υ
ch
up
i
υ
ch
dw
i
Q
c
up
i
Q
c
dw
i
Q
c
i
Q
u
i
NR
1
6.7 − X − −1 6.56
NR
2
3.5 23 [0;6.4] [0;∗] 0 0.63
NR
3
5.9 7.3 [0; 30] [0; 60] 0 1.2
By taking into account the tide, the sample time
that is considered in these simulations corresponds to
T
M
= 6 hours.
4.2 Design of the Optimal Water
Allocation Strategy
The lower and upper bound capacities of the arcs
l
i j
(k) and u
i j
(k) are determined according to the flow
graph G depicted in Figure 3.c and to the known dis-
charge intervals that are given in Table 2 over the pe-
riod T
M
. By considering the case study, the sets are
χ =
{
1
}
, and κ =
{
2,3
}
, the number of lock operati-
ons is denoted β
i j
(k) ∈ N with i the index of the up-
stream NR (i can be the node O) and j the index of
the downstream NR ( j can be the node S):
1. upper bound capacities for arcs
φ
12
, φ
13
, φ
O1
, φ
1
2S
,φ
3S
are the sum of the
maximum available volumes from water intakes
over T
M
, i.e. as an example V
u
1
= Q
u
1
· T
M
, and
volumes that correspond to the lock operations,
i.e. as an example υ
ch
up
1
· β
O1
(k),
2. upper bound capacities for arcs
{
φ
O2
,φ
O3
}
are
the sum of the maximum available volumes from
water intakes over T
M
, i.e. V
u
2
= Q
u
2
· T
M
and
V
u
3
= Q
u
3
· T
M
respectively,
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
80

3. upper bound capacity for arc
{
φ
1S
}
, corresponds
to the sum of the maximum volumes that can
empty NR
1
during T
M
, i.e. V
c
1
= Q
c
1
· T
M
,
4. upper bound capacity for arc
φ
2
2S
, corresponds
to the maximum discharge that can be pumped to
the sea during T
M
, i.e. Q
p
2
· T
M
,
5. lower bound capacities for arcs
φ
12
, φ
13
, φ
1
2S
,φ
3S
are the volumes from that
lock operations, i.e. as an example υ
ch
dw
2
· β
2S
(k),
6. lower bound capacity for arc
{
φ
O1
}
is the volume
from that lock operation and the sum of the max-
imum available volumes from water intakes over
T
M
, i.e. υ
ch
up
1
· β
O1
(k) and V
u
1
= Q
u
1
· T
M
,
7. lower bound capacities for arcs
φ
O2
,φ
O3
,φ
2
2S
are equal to 0,
8. lower bound capacity for the arc
{
φ
1S
}
is equal to
the reserved discharge during period T
M
, i.e. V
c
1
=
Q
c
1
· T
M
,
that leads to:
φ
O1
∈ [υ
ch
up
1
· β
O1
(k) + Q
u
1
· T
M
; υ
ch
up
1
· β
O1
(k) + Q
u
1
· T
M
],
φ
O2
∈ [Q
u
2
· T
M
; Q
u
2
· T
M
],
φ
O3
∈ [Q
u
3
· T
M
; Q
u
3
· T
M
],
φ
1S
∈ [Q
c
1
· T
M
; Q
c
1
· T
M
],
φ
1
2S
∈ [υ
ch
dw
2
· β
2S
(k); υ
ch
dw
2
· β
2S
(k) + Q
dw
2
· T
M
], low tide,
φ
1
2S
∈ [υ
ch
dw
2
· β
2S
(k); υ
ch
dw
2
· β
2S
(k)], high tide,
φ
2
2S
∈ [0; Q
p
2
· T
M
],
φ
3S
∈ [υ
ch
dw
3
· β
3S
(k); υ
ch
dw
3
· β
3S
(k) + Q
c
dw
3
· T
M
],
φ
12
∈ [υ
ch
up
2
· β
12
(k); υ
ch
up
2
· β
12
(k) + Q
c
up
2
· T
M
],
φ
13
∈ [υ
ch
up
3
· β
13
(k); υ
ch
up
3
· β
13
(k) + Q
c
up
3
· T
M
],
(5)
where Q
p
2
is the maximum capacity of the pump, T
M
is expressed in 10
−3
s to obtain volumes in 10
3
· [m
3
],
and Q the upper value of the controlled discharge in-
terval.
The management objective aims at keeping the ca-
pacity objective D
i
= 0 for each NR. A same and con-
stant quadratic cost function W
i
is assigned to each
NR
i
:
W
i
((D
i
− d
i
(k))
2
) =
(
C
max
(d
i
)
2
· (D
i
− d
i
(k))
2
, i f d
i
(k) ≤ 0,
C
max
(d
i
)
2
· (D
i
− d
i
(k))
2
, i f d
i
(k) > 0,
(6)
with C
max
the maximal cost, assuming that d
i
and
d
i
correspond to the lower and upper boundaries re-
spectively. For the proposed system, C
max
= 2,000 as
a big arbitrary value. It is assumed that water volu-
mes that supply or empty the network from natural ri-
vers
{
φ
O2
, φ
O3
, φ
1S
}
have less priority than the others
φ
O1
, φ
12
, φ
13
, φ
1
2S
, φ
3S
. Thus, two different costs
are chosen such as
ω
O1
, ω
12
, ω
13
, ω
1
2S
, ω
3S
= 0
and
{
ω
O2
, ω
O3
, ω
1S
}
= 1. Moreover, the cost asso-
ciated to the pump is defined as
ω
2
2S
= 5.
Table 3: Navigation demand over 1 week.
Day 1 2 3 4 5 6 7
β
O1
21 19 20 22 21 20 0
β
12
13 10 14 12 13 14 0
β
13
14 12 15 16 13 14 0
β
2S
10 9 10 11 9 11 0
β
3S
16 15 16 18 16 15 0
4.3 Water Allocation Planning
The proposed water allocation planning algorithm has
been implemented in Matlab. A Simulink model has
been build to reproduce the dynamics of the studied
network. It is run at a discrete time T M correspon-
ding to 6 hours. At each step k, the current states
of the NR, i.e. d
i
(k), the navigation demand and the
predicted water volumes that come from rain are ta-
ken into account for the minimization of the criterion
J
V
(k) (see equation 4). New setpoints are therefore
computed for the controlled devices of the conside-
red network, then a new simulation step is run. The
results can be depicted at the end of the simulation.
To test the proposed approach and highlight the
requirement of a good prediction of water volumes
that come from rain, several scenarios have been built.
For all these scenarios, the navigation is allowed du-
ring half of the day and then forbidden (12 hours for
navigation and 12 hours without navigation). The na-
vigation is also forbidden the 7
th
day that corresponds
to Sunday. The navigation demand is the same for all
the scenarios. It is given in Table 3. The effect of the
tide is also simulated that allows the rejection of water
volume to the sea by gravity during 6 hours during the
beginning of the navigation periods and the beginning
of the non navigation periods.
The scenarios are built by considering extreme
rainy events. They impact directly the inland naviga-
tion network by increasing the uncontrolled dischar-
ges that supply each NR. These uncontrolled dischar-
ges are multiplied by 3 between time 1 to 4 and by
more than 4 between time 7 to 14 (see Figure 4).
The first scenario (Scenario 1) consists in using
the water allocation planning algorithm without any
prediction about the increase of the uncontrolled dis-
charges. The NR
1
is the most impacted because the
magnitude of uncontrolled discharges is high and the
water allocation planning is not able to allocate the
water between the NR (see Figure 5.a). The rain has
also some flood consequence during the second rainy
event in the NR
3
(see Figure 5.c). However, the vo-
lume of the NR
2
stays inside the defined boundaries
thanks to the use of the pump (see Figure 6.b) and the
water rejection to the sea by gravity (see Figure 6.a).
The water volumes can be rejected by gravity to the
Water Asset Management Strategy based on Predictive Rainfall/Runoff Model to Optimize the Evacuation of Water to the Sea
81
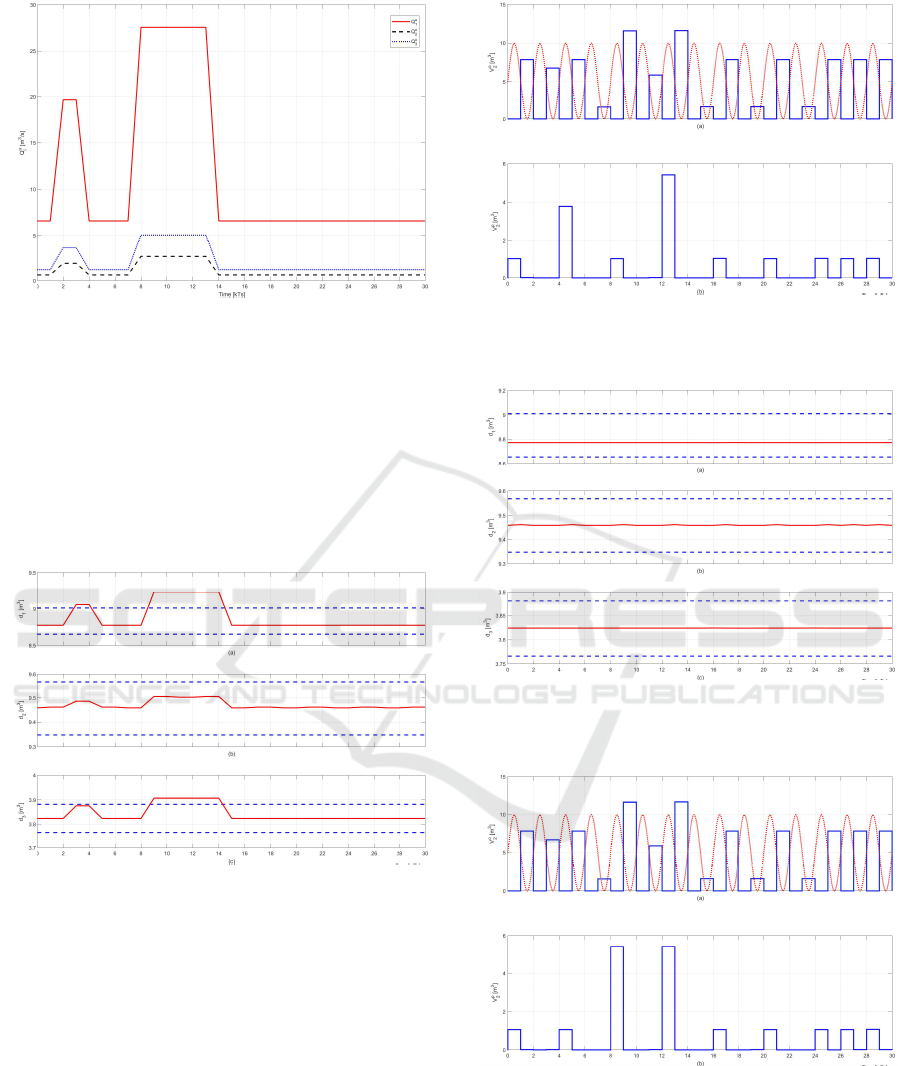
Figure 4: Uncontrolled discharges Q
u
1
, Q
u
2
and Q
u
3
for the
defined scenario with two periods of strong rain, where a
sample time correspond to 6 hours.
sea only during low tide. The tide is depicted in red
dotted line in Figure 6.a. When additional water vo-
lumes that come from rain have to be rejected during
high tide, it is necessary to use the pump guaranteeing
the navigation condition in NR
2
(see sample times 4
and 12 in Figure 6.b). This strategy allows limiting
the cost due to the use of the pump.
Figure 5: Scenario 1: in red line, the water volume in (a)
the NR
1
, (b) the NR
2
and (c) the NR
3
, in blue dashed line
the allowed boundaries.
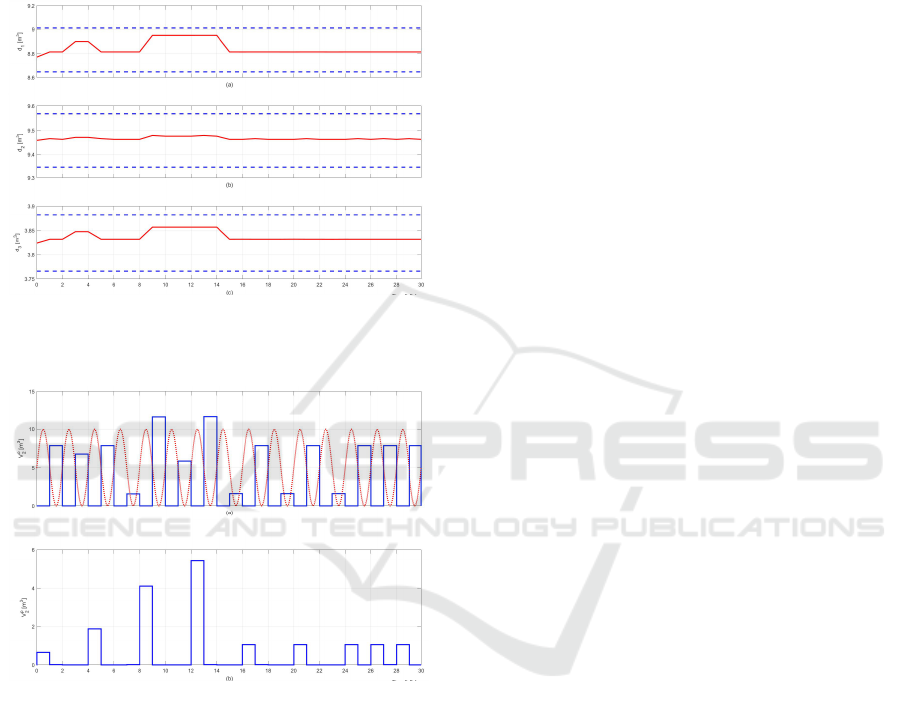
The second scenario (Scenario 2) is based on the
strong assumption that the water volumes from rainy
events are perfectly predicted. With this assumption,
the three NR keep perfectly their navigation objective
as it is depicted in Figure 7. In this case also, the
pump and the water rejection by gravity are used to
keep the objective in the NR
2
by taking into account
the tide (see Figure 8). The water volumes that are
pumped are not so different than the Scenario 1. In
this Scenario 2, the water volumes have been better
allocated between the three NR. This strategy allows
limiting the cost due to the use of the pump.
The third scenario (Scenario 3) consists in consi-
Figure 6: Scenario 1: water volumes that are rejected by (a)
gravity to the sea, (b) pump [m
3
], with the tide depicted in
red dotted line.
Figure 7: Scenario 2: in red line, the water volume in (a)
the NR
1
, (b) the NR
2
and (c) the NR
3
, in blue dashed line
the allowed boundaries.
Figure 8: Scenario 2: water volumes that are rejected by (a)
gravity to the sea, (b) pump [m
3
], with the tide depicted in
red dotted line.
dering an error of 30 % in the prediction of the water
volumes from rainy events. Based on this assumption,
the NR
1
is still the most impacted. However, its vo-
lume is kept inside the defined boundaries (see Figure
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
82
9.a). The objectives are guaranteed also for NR
2
and
NR
3
as it is depicted in Figure 9.b and in Figure 9.c.
The pump and the water rejection by gravity are still
used to keep the objective in the NR
2
by taking into
account the tide (see Figure 8). The pumped volu-
mes are more progressive during the time, but not so
different from the two first scenarios.
Figure 9: Scenario 3: in red line, the water volume in (a)
the NR
1
, (b) the NR
2
and (c) the NR
3
, in blue dashed line
the allowed boundaries.
Figure 10: Scenario 3: water volumes that are rejected by
(a) gravity to the sea, (b) pump [m
3
], with the tide depicted
in red dotted line.
The three scenarios show that the prediction of
strong rainy events is required to optimize the water
resource management of inland navigation networks.
However, the Scenario 3 indicates that the manage-
ment objectives can be kept even if a big error is made
on this prediction, i.e. an error of 30 %. Hence, a
strong effort have to be done on the design of accu-
rate predictive rainfall/runoff models.
5 CONCLUSIONS
In this paper, the integrated model and the flow graph
that have been already proposed in past publications,
are adapted and improved to deal with the case of in-
land water systems with outlet to the sea. The water
allocation planning algorithm is also adapted to consi-
der these new elements. A realistic case study which
characteristics are based on the real inland waterways
of the north of France is presented to test these im-
proved tools and algorithm. The simulation results
show that the prediction of the impacts of rainy events
is necessary to guarantee the management objectives
even if an important error in prediction can be allo-
wed. Future works will be dedicated to improve the
predictive rainfall/runoff model. Then, the designed
tools and methods can be applied on a part of a real
inland waterway.
REFERENCES
Arkell, B. and Darch, G. (2006). Impact of climate change
on london’s transport network. Proceedings of the ICE
- Municipal Engineer, 159:231–237.
Bastin, G., Moens, L., and Dierick, P. (2009). Online ri-
ver flow forecasting with hydromax : successes and
challenges after twelve years of experience. In pro-
ceedings of the 15th IFAC Symposium on System Iden-
tification, Saint-Malo, France, July 6-8.
Bates, B., Kundzewicz, Z., Wu, S., and Palutikof, J. (2008).
Climate change and water. Technical repport, Inter-
governmental Panel on Climate Change, Geneva.
Bo
´
e, J., Terray, L., Martin, E., and Habetsi, F. (2009). Pro-
jected changes in components of the hydrological cy-
cle in french river basins during the 21st century. Wa-
ter Resources Research, 45.
Bourgin, F. (2014). Comment quantifier lincertitude pr-
dictive en modlisation hydrologique ? : Travail explo-
ratoire sur un grand chantillon de bassins versants.
PhD thesis. Thse de doctorat dirige par Andrassian,
Vazken Hydrologie Paris, AgroParisTech 2014.
Brand, C., Tran, M., and Anable, J. (2012). The uk transport
carbon model: An integrated life cycle approach to
explore low carbon futures. Energy Policy, 41:107–
124.
Dakhlaoui, H., Ruelland, D., Tramblay, Y., and Barga-
oui, Z. (2017). Evaluating the robustness of concep-
tual rainfall-runoff models under climate variability
in northern tunisia. Journal of Hydrology, 550:201
– 217.
Ducharne, A., Habets, F., Pag
´
e, C., Sauquet, E., Viennot,
P., D
´
equ
´
e, M., Gascoin, S., Hachour, A., Martin, E.,
Oudin, L., Terray, L., and Thi
´
ery, D. (2010). Cli-
mate change impacts on water resources and hydro-
logical extremes in northern france. XVIII Conference
on Computational Methods in Water Resources, June,
Barcelona, Spain.
Water Asset Management Strategy based on Predictive Rainfall/Runoff Model to Optimize the Evacuation of Water to the Sea
83

Duviella, E. and Bako, L. (2012). Predictive black-box mo-
deling approaches for flow forecasting of the liane ri-
ver. SYSID12, Bruxelles, Belgium, July 11-13.
Duviella, E., Nouasse, H., Doniec, A., and Chuquet, K.
(2016). Dynamic optimization approaches for re-
source allocation planning in inland navigation net-
works. ETFA2016, Berlin, Germany, September 6-9.
Duviella, E., Rajaoarisoa, L., Blesa, J., and Chuquet, K.
(2013). Adaptive and predictive control architecture
of inland navigation networks in a global change con-
text: application to the cuinchy-fontinettes reach. in
IFAC MIM conference, Saint Petersburg, 19-21 June.
Edijatno and Michel, C. (1989). Un mod
`
ele pluie-d
´
ebit
journalier
`
a trois param
`
etres. La Houille Blanche,
2:113 121.
Edijatno, Nascimento, N. D. O., Yang, X., Makhlouf, Z.,
and Michel, C.
EnviCom (2008). Climate change and navigation - water-
borne transport, ports and waterways: A review of cli-
mate change drivers, impacts, responses and mitiga-
tion. EnviCom - Task Group 3.
Ficchi, A. (2017). An adaptive hydrological model for mul-
tiple time-steps : diagnostics and improvements based
on fluxes consistency. Theses, Universit
´
e Pierre et Ma-
rie Curie - Paris VI.
Horv
`
ath, K., Duviella, E., Rajaoarisoa, L., and Chuquet,
K. (2014a). Modelling of a navigation reach with
unknown inputs: the cuinchy-fontinettes case study.
Simhydro, Sofia Antipolis, 11-13 June.
Horv
`
ath, K., Duviella, E., Rajaoarisoa, L., Negenborn, R.,
and Chuquet, K. (2015a). Improvement of the naviga-
tion conditions using a model predictive control - the
cuinchy-fontinettes case study. International Confe-
rence on Computational Logistics, Delft, The Nether-
lands, 23-25 September.
Horv
`
ath, K., Petrecsky, M., Rajaoarisoa, L., Duviella, E.,
and Chuquet, K. (2014b). Mpc of water level in a navi-
gation canal - the cuinchy-fontinettes case study. Eu-
ropean Control Conference, Strasbourg, France, June
24-27.
Horv
`
ath, K., Rajaoarisoa, L., Duviella, E., Blesa, J., Pet-
reczky, M., and Chuquet, K. (2015b). Enhancing in-
land navigation by model predictive control of water
level the cuinchy-fontinettes case. Transport of Wa-
ter versus Transport over Water - Exploring the dyn-
amic interplay between transport and water - Carlos
Ocampo-Martinez, Rudy Engenborn (eds).
IWAC (2009). Climate change mitigation and adaptation.
implications for inland waterways in england and wa-
les. Report.
Jonkeren, O., Rietveld, P., and van Ommeren, J. (2007). Cli-
mate change and inland waterway transport: welfare
effects of low water levels on the river rhine. Journal
of Transport Economics and Policy, 41:387–412.
Kara, S., Sihn, W., Pascher, H., Ott, K., Stein, S., Schu-
macher, A., and Mascolo, G. (2015). A green and
economic future of inland waterway shipping. Proce-
dia CIRP - The 22nd CIRP Conference on Life Cycle
Engineering, 29:317 – 322.
Koetse, M. J. and Rietveld, P. (2009). The impact of cli-
mate change and weather on transport: An overview
of empirical findings. Transportation Research Part
D: Transport and Environment, 14(3):205 – 221.
Laurain, V. (2010). Contributions l’identification de
mod
`
eeles param
´
etriques non lin
´
eaires. application la
modlisation de bassins versants ruraux. PhD thesis,
Universit
´
e Henri Poincar
´
e, Nancy 1.
Ljung, L. (1999). System identification : theory for the user
(2nd Edition). Prentice Hall, Upper Saddle River.
Mallidis, I., Dekker, R., and Vlachos, D. (2012). The impact
of greening on supply chain design and cost: a case for
a developing region. Journal of Transport Geography,
22:118–128.
Mihic, S., Golusin, M., and Mihajlovic, M. (1993). Policy
and promotion of sustainable inland waterway trans-
port in europe - danube river. Renewable and Sustai-
nable Energy Reviews, 15:1801–1809.
Nash, J. E. and Sutcliffe, J. V. (1970). River flow forecas-
ting through conceptual models part I: a discussion of
principles. Journal of Hydrology, 10(3):282–290.
Nouasse, H., Doniec, A., Lozenguez, G., Duviella, E., Chi-
ron, P., Archimde, B., and Chuquet, K. (2016a). Con-
straint satisfaction problem based on flow transport
graph to study the resilience of inland navigation net-
works in a climate change context. IFAC Conference
MIM, Troyes, France, 28-30 June.
Nouasse, H., Horv
`
ath, K., Rajaoarisoa, L., Doniec, A., Du-
viella, E., and Chuquet, K. (2016b). Study of global
change impacts on the inland navigation management:
Application on the nord-pas de calais network. Trans-
port Research Arena, Varsovie, Poland.
Nouasse, H., Rajaoarisoa, L., Doniec, A., Chiron, P., Du-
viella, E., Archimde, B., and Chuquet, K. (2015).
Study of drought impact on inland navigation systems
based on a flow network model. ICAT, Sarajevo, Bos-
nie Herzegovia.
Perrin, C., Michel, C., and Andr
´
eassian, V. (2003). Impro-
vement of a parsimonious model for streamflow simu-
lation. Journal of Hydrology, 279:275 – 289.
Previdi, F. and Lovera, M. (2009). Identification of
parametrically-varying models for the rainfall-runoff
relationship in urban drainage networks. IFAC Pro-
ceedings Volumes, 42(10):1768 – 1773. 15th IFAC
Symposium on System Identification.
Rajaoarisoa, L., Horv
`
ath, K., Duviella, E., and Chuquet, K.
(2014). Large-scale system control based on decen-
tralized design. application to cuinchy fontinette re-
ach. IFAC World Congress, Cape Town, South Africa,
24-29 August.
Segovia, P., Rajaoarisoa, L., Nejjari, F., Puig, V., and Du-
viella, E. (2017). Decentralized control of inland na-
vigation networks with distributaries: application to
navigation canals in the north of france. ACC17, Se-
attle, WA, USA, May 2426.
Siou, L. K. A., Johannet, A., Pistre, S., and Borrell, V.
(2010). Flash floods forecasting in a karstic basin
using neural networks: the case of the lez basin (south
of france). International Symposium on Karst ISKA,
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
84

Malaga. In Advances in research in karst media. An-
dreo et al eds Springer.
T
`
oth, R., Felici, F., Heuberger, P. S. C., and den Hof, P.
M. J. V. (2007). Discrete time lpv i/o and state space
representations, differences of behavior and pitfalls of
interpolation. Proc. of the European Control Conf.,
Kos, Greece, July 5418 5425.
Wang, S., Kang, S., Zhang, L., and Li, F. (2007). Model-
ling hydrological response to different land-use and
climate change scenarios in the zamu river basin of
northwest china. Hydrological Processes, 22:2502–
2510.
Young, P. C. (1986). Time series methods and recursive
estimation in hydrological systems analysis. In River
flow modelling and forecasting, D. A. Kraijenhoff, J.
R. Moll (eds). D. Reidel : Dordrecht, page 129 180.
Water Asset Management Strategy based on Predictive Rainfall/Runoff Model to Optimize the Evacuation of Water to the Sea
85
