
Chaos Engineering and Control in Mobile Robotics Applications
Salah Nasr
1
, Amine Abadi
1
, Kais Bouallegue
2
and Hassen Mekki
1
1
Networked Objects Control and Communication Systems-Laboratory, National Engineering School of Sousse,
University of Sousse, Tunisia
2
Department of Electrical Engineering, Higher Institute of Applied Sciences and Technology of Sousse, Tunisia
Keywords: Chaos Theory, Chaos Engineering, Chaotic Mobile Robot, Chaos Control, Robotic Applications.
Abstract: This article briefly summarizes the theory of chaos and its applications. Firstly, we begin by describing
chaos as an aperiodic bounded deterministic motion, which is sensitive to initial states and therefore
unpredictable after a certain time. Then, fundamental tools of the chaos theory, used for identifying and
quantifying chaotic dynamics, are shared. The paper covers a main numerical approach to identify chaos
such as the Lyapunov exponents. Many important applications of chaos in several areas such as chaos in
electrical and electronic engineering and chaos applications in robotics have been presented. An analysis of
the reviewed publications is presented and a brief survey is reported as well.
1 INTRODUCTION
During the 20th century, three great revolutions
occurred: quantum mechanics, relativity and chaos.
The theory of chaos, also called dynamical systems
theory, is the study of unstable aperiodic behavior in
deterministic dynamical systems, which show a
sensitive dependence on initial conditions
(Vaidyanathan, 2013). The sensitive dependence on
initial conditions implies that arbitrary initial
conditions follow trajectories that move away from
one another after a certain time (Moon, 2008), as
shown in figure 1. Due to determinism (Morrison,
2012), chaos is predictable for the short time; but it
is unpredictable in the long run due to sensitivity to
initial conditions. Chaos is characterized by a large
sensitive dependence to the initial state, by its
inability to predict future consequences, by the
Lyapunov exponent (Kuznetsov, 2016), by its fractal
dimension, and so on.
The nonlinear dynamics and chaos terms have
become known to most scientists and engineers over
the past few decades. Nonlinearities occur in
feedback processes (Gaponov-Grekhov and
Rabinovich, 2011), in systems containing interacting
subsystems, and in systems interacting with the
environment.
This scenario is qualitatively and quantitatively
distinct from the situations where the perturbations
develop linearly. Thanks to the availability of high-
speed computers and new analytical techniques, it
has become clear that the chaotic phenomenon is of
a universal nature and has transverse consequences
in various areas of human endeavour.
The devices of the fire fighting and floor
cleaning have been developed by exploiting
autonomous mobile robots as useful tools in
activities that put the integrity of humans in danger,
such as monitoring and exploring of terrains for
explosives or dangerous materials and such as
intrusion patrols at military installations. This has
driven to the development of intelligent robotic
systems (Martins-Filho and Macau, 2007).
Therefore, the unpredictability of a trajectory is also
a crucial factor for the mission success for such an
autonomous mobile robot. To meet this challenge,
Sekiguchi and Nakamura suggested a strategy in
2001 to solve the problem of path planning based on
chaotic systems (Nakamura and Sekiguchi, 2001).
Figure 1: Two trajectories that start close to each other but
diverge within a few tens of seconds (Moon, 2008).
364
Nasr, S., Abadi, A., Bouallegue, K. and Mekki, H.
Chaos Engineering and Control in Mobile Robotics Applications.
DOI: 10.5220/0006867103640371
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 2, pages 364-371
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
A key property of chaos is that simple dynamical
systems can often engender complex dynamics.
These systems can be implemented using simple
analogue hardware (Aihara, 2012).
In order to explore the applications of chaos in
engineering and robotics, this paper is organized as
follows. Section 2 gives an overview of the chaos
theory. In section 3, we review the research on
applications of chaotic dynamics in electrical and
electronic engineering. Chaos synthesis in robotics is
presented as an application of chaotic systems for
motion planning of autonomous mobile robots in
section 4. The conclusion is presented in section 5.
2 CHAOS THEORY:
AN OVERVIEW
The movements of several natural or engineering
systems can be governed by a set of equations
derived from natural laws such as the Newton's laws
or the Euler equation. The equations that describe a
dynamic system can be algebraic or differential. The
set of equations, mathematically defined as a
dynamic system, gives the temporal evolution of the
state of a system from the knowledge of its previous
history. Therefore, the state at any time can be
determined by the governing equations and the
initial states. In modern science, the term chaos is
used to describe a type of motion resulting from a
dynamic system that appears to be disordered and
extremely complex under detailed examination.
Complicacy and disorder are due to the reasons that
chaos is a recurrent aperiodic motion. Hence, chaos
can be defined as a bounded steady-state response
that is not an equilibrium state, a periodic motion, or
a quasi-periodic motion.
Chaotic movements are also characterized by
sensitivity to initial states; i.e, a simple variation in
the initial conditions can quickly produce enormous
differences in response. The long-term prediction of
chaos is impossible, due to such sensitivity. In other
words, chaos is unpredictable after some time
because a small difference in initial conditions
beyond their precision will result in a rapid growing
of the movement.
A dynamical system is called chaotic if it
satisfies the three properties: boundedness, infinite
recurrence, and sensitive dependence on initial
conditions (Azar and Vaidyanathan, 2015, Azar and
Vaidyanathan, 2014). The Chaos theory investigates
the qualitative and numerical study of unstable
aperiodic behaviour in deterministic nonlinear
dynamical systems.
In 1963, Lorenz (Lorenz, 1963) discovered a 3-D
chaotic system when he was studying a 3-D weather
model for atmospheric convection. After a decade,
Rössler (Rössler, 1976) discovered a 3-D chaotic
system, which was constructed during the study of a
chemical reaction. These classical chaotic systems
paved the way to the discovery of a lot of 3-D chao-
tic systems such as the Arneodo system (Arneodo et
al., 1981), the Chen system (Chen and Ueta, 1999),
the Lü-Chen system (Lü and Chen, 2002), the Tigan
system (Tigan and Opriş, 2008), etc.
Some other scientists have tried to propose new
dynamic systems. In (Leonov and Kuznetsov, 2013),
Leonov gave a survey on the relationship between
hidden oscillators and hidden chaotic attractors.
Snchez-Lpez et al. (Sánchez-López et al., 2010)
proposed a method to generate a multi-scroll chaotic
attractor based on Saturated Nonlinear Function
Series. In (Zhang and Tang, 2012), Zhang and Tang
introduced a new chaotic system with four
components that can generate chaos, hyperchaos,
and periodic and quasi-periodic behaviors. Sun et al.
(Sun et al., 2014) presented a finite-time
combination scheme of four chaotic systems and
solved the problem of the synchronization of two
systems. Bouallegue (Bouallegue, 2015b) found a
method to generate a new class of chaotic attractors
that possessed a multi-fractal scroll based on a
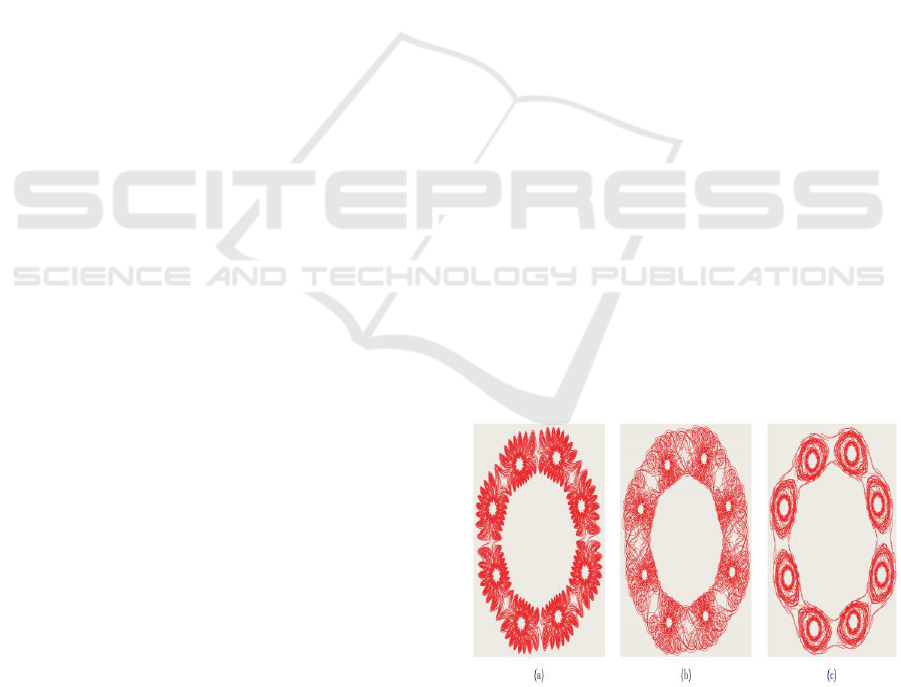
fractal process, as illustrated in figure 2. Another
work by Kais Bouallegue (Bouallegue, 2015a) and
Salah Nasr (Salah NASR, 2015) put forward a new
behavior of chaotic attractors with separated scrolls
using the combination between the fractal process
and the chaotic attractors as depicted in figure 3.
Figure 2: Chaotic attractor with fractal and multifractal
scrolls. (a) Multichaotic attractor with Lorenz system, (b)
multichaotic attractor with Chua system and (c)
multichaotic attractor with Rössler system (Bouallegue,
2015b).
Chaos Engineering and Control in Mobile Robotics Applications
365

Figure 3: Chaotic attractors with four behavior forms
(Salah NASR, 2015).
2.1 Identification of Chaos
The identification of chaos is the set of diagnostic
tests to determine if chaotic behavior occurs in a
specific system. To identify chaos, some numerical
characteristics associated with the motion of a
system can be used. These characteristics include the
Lyapunov exponents, power spectra and entropies.
2.2 Lyapunov Exponent
To estimate and compute the Lyapunov dimension,
Leonov (Kuznetsov et al., 2016, Kuznetsov, 2016)
proposed an analytical approach in 1991. A
Lyapunov exponent may be positive or negative. A
positive Lyapunov exponent implies the divergence
in the corresponding direction. A negative exponent
implies the constriction in the corresponding
direction. Hence, most dynamic systems can be
characterized by their Lyapunov exponents
(Kaygisiz et al., 2011). For a chaotic attractor, a two-
dimensional system must have a positive and a
negative Lyapunov exponents. If the system has two
zero Lyapunov exponents and two negative ones
then, the system is quasi-periodic. If the four-
dimensional system is hyperchaotic, it should have
two positives, a zero one and a negative one.
3 CHAOS ENGINEERING
APPLICATIONS
Over the last few decades, the terms chaos and
nonlinear dynamics are known to most engineers
and scientists. Nonlinearities occur in feedback
processes, in systems containing interacting
subsystems and in systems interacting with the
environment. It is striking to note that simple
devices, such as a double pendulum, and a very
complex event such as time follow the same
dynamics, which can only be predicted for short
time horizons (Kaygisiz et al., 2011). Thanks to the
existence of high-speed computers, new analytical
techniques and sophisticated experiments, it has
become clear that the chaotic phenomenon is of a
universal nature and has transverse consequences in
various fields of human endeavour.
Recently, chaos theory is found to have
important applications in several areas such as
biology (Garfinkel, 1992, May, 1976, Vaidyanathan,
2015a, Vaidyanathan, 2015b), memristors (Pham et
al., 2015, Volos et al., 2015a), electrical circuits
(Volos et al., 2015b), robotics (Nakamura and
Sekiguchi, 2001), etc.
A lot of practical applications of deterministic
chaos have been developed in various fields of
engineering and technology. Actually, studies of
nonlinear dynamics in engineering disciplines have
been steadily progressing over a half century.
Among these disciplines, we are going to deal with
electrical and electronic engineering, and
synchronization of chaotic systems.
3.1 Electrical and Electronic
Engineering
A lot Electrical and electronic circuits are typical
fields in which rich chaotic phenomena have been
reported. In 1927, Van der Mark and Van der Pol
heard noise corresponding to deterministic chaos in
an electrical system composed of a resistor, a neon
glow lamp, a variable condenser, and D.C. and A.C.
power sources (Van der Pol and Van der Mark,
1927). Since then, chaos has been detected both
experimentally and numerically in many electrical
and electronic circuits like the Chua's circuit, the
Shinriki's circuit (Chua et al., 1993, van Wyk and
Steeb, 1997) and the series RLC circuit with a
varactor diode (Testa et al., 1982). It should be noted
that both the Duffing equation and the Duffing-Van
Der Pol mixed type equation are also models of
electrical circuits with a nonlinear inductance and a
nonlinear resistance, respectively.
In order to create controlled chaotic outputs, the
work presented in (Hanias and Tombras, 2009,
Hanias et al., 2010) makes the study of simple
circuits which are composed of simple transistors
triggered externally be able to give significant
results for the possibility of creating its chaotic
outputs. These results are very important, especially
in telecommunication systems where the need for
safe signal transmission is imperative. In their work,
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
366
the authors presented the chaotic behavior of three
forms of these circuits as well as corresponding
theoretical methodology. Next, in the study of
simple chaotic circuits, we consider the case of an
optoelectronic chaotic circuit which is based on an
optocoupler device and which can be used as a
controlled optoelectronic chaotic signal generator,
presented in (Hanias, 2010).
These studies have confirmed that chaos can be
actually and easily generated in nonlinear electrical
and electronic circuits.
3.2 Synchronization of Chaotic System
In parallel with the great advances in the chaos
theory, the prospects of utilizing chaos in various
applications, particularly in telecommunication,
have motivated researchers to study the possibility
of synchronizing chaos. The synchronization of non-
linear oscillators is a phenomenon which has
attracted the attention of researchers since the
discovery and description of this phenomenon by
Huygens in 1673, in an example of two coupled
mechanical systems. The phenomenon of
synchronization is manifested when two dynamic
systems evolve in an identically as a function of
time.
Since this innovative discovery, different
synchronization regimes have been distinguished
such as identical synchronization (Pecora and
Carroll, 1990) and generalized synchronization
(Rulkov et al., 1995). In (Jemaâ-Boujelben and Feki,
2016, Feki, 2004), the authors suggested a simple
Multi-input Multi-output (MIMO) adaptive control
based on a Sliding Mode Observer (SMO) to
synchronize chaos in the PMSM.
Similar to the integration of order chaotic
systems, the synchronization of fractional order
chaotic systems has interested several researchers
(Wang and Song, 2009, Tang and Fang, 2010). In
(Kiani-B et al., 2009), the synchronization of
fractional chaotic systems using the fractional
extended Kalman filter has were presented with an
application to secure communication. To
synchronize uncertain fractional order chaotic
systems, the authors used the adaptive fuzzy sliding
mode control in (Lin et al., 2011), and in
(Senejohnny and Delavari, 2012) the authors
employed a combination of a classical sliding
observer and an active observer. The generalized
synchronization was also addressed in the context of
fractional order chaotic systems.
4 CHAOTIC APPLICATIONS IN
ROBOTICS
We hope time is ripe for reviewing the application of
chaos in robotics. The community of robotics is
trying to emulate these natural behaviours by
investigating humanoids, bio-robots and the
biologically inspired systems such as swarms. These
systems confront problems like vibration, noise-
sensing and robot environment interactions leading
to chaos.
As a very interesting topic, Robotics and
particularly their applications have emerged in
various activities. In the military field, robotic
systems should have an interesting feature as target
identification and perception as well as positioning
robots on the ground. Moreover, the greatest
challenge for those successful robot missions is the
optimal path planning. Such nonlinearities have led
researchers to utilize chaotic trajectory planning
techniques for autonomous mobile robots to ensure a
rapid search of the whole workspace(Kaygisiz et al.,
2011) . The aim of the employment of chaotic
signals for autonomous mobile robots is to benefit
from coverage areas got through their movement
paths.
To meet this challenge Sekiguchi and Nakamura
suggested a strategy in 2001 to solve the problem of
path planning based on chaotic systems (Nakamura
and Sekiguchi, 2001). In that work, the chaotic
behavior of the Arnold dynamical system was
imparted to the mobile robot’s motion control.
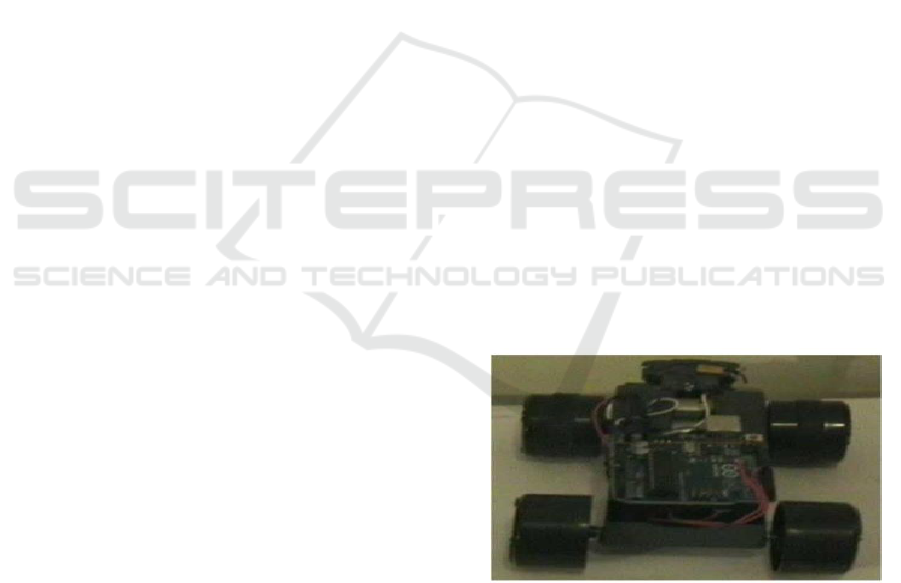
Figure 4: The chaotic autonomous mobile robot (Volos et
al., 2013a).
Since then, a lot of relative researches have been
presented by many research teams because the
chaotic movement of the robot ensures the scanning
of the entire workspace without previous knowledge
of the terrain map. In (Volos et al., 2013a), a new
navigation strategy by designing a controller was
experimentally investigated, which ensured a chaotic
Chaos Engineering and Control in Mobile Robotics Applications
367
motion to an autonomous mobile robot wich is
presented in figure 4. The proposed controller
produced an unpredictable trajectory by imparting
the system’s chaotic behavior to the two independent
active wheels of the mobile robot.
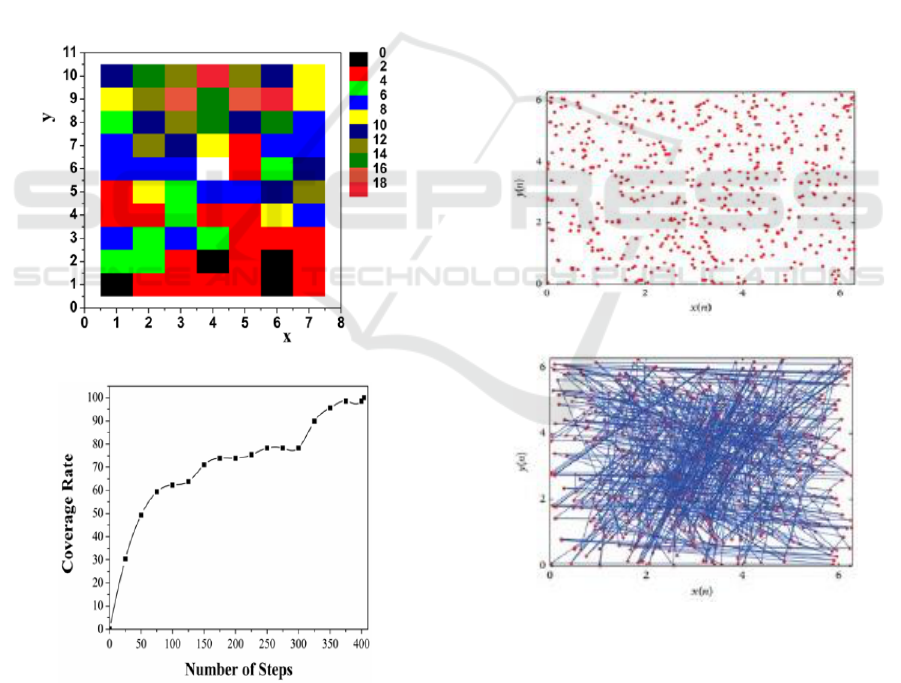
In figure 5 a, the diagram shows the color scale
map of the terrain’s cells versus the times of visiting.
There are cells, wherein the robot has visited from 1
to up 18 times in the 24 minutes of operation. In
addition, the coverage rate versus the number of
visited cells, for the robot with the proposed chaotic
motion controller, is presented in figure 5 b.
Finally, according to the experimental results, the
high unpredictability of the robot’s trajectory, which
is very crucial in many tasks, is confirmed by
utilizing the suggested chaotic motion controller.
Furthermore, other two crucial tasks are succeeded
such as the complete and fast scanning of the
workspace.
(a)
(b)
Figure 5: (a) Color scale map of the terrain’s cells versus
the times of visiting, (b) Coverage rate versus number of
motion commands, for operation of 16 minutes. (Volos et
al., 2013a).
Similarly, a chaotic path planning generator for a
mobile robot was implemented by Volos et al. to
cover the overall workspace in an erratic and swift
manner. Therefore, the authors presented a Khepera,
which is popular in the robotics community,
integrating a behaviour-based control (Volos et al.,
2012a, Volos et al., 2012b). The chaotic generator
used three different chaotic systems producing a
double-scroll chaotic attractor.
Furthermore, Volos et al. put forward a motion
control strategy for humanoid and mobile robots
utilizing a chaotic truly random bit generator (Volos
et al., 2012d, Volos et al., 2012c). They implement-
ed an autonomous robot on an experimental platform
called the “Magician Chassis” using this generator.
This technique ensured highly unpredictable robot
trajectories that are random from an observer’s
viewpoint (Volos et al., 2013a, Volos et al., 2013b).
The numerical simulations demonstrated the
efficiency of this strategy and the statistical tests
also proved the randomness of the planned motions.
(a)
(b)
Figure 6: Intermediate iteration points distribution in the
phase space and their trajectories: (a) Iteration points; (b)
Iteration trajectories (Li et al., 2015).
Other proposals such as the studies of Caihong et al.
introduced a chaotic path planner based on a logistic
map. This deterministic and simple system was
characterized by a random behaviour, allowing large
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
368
workspace coverage (Li et al., 2013). Morever, they
suggested a fusion strategy to develop a chaotic path
planner for mobile robots, based on the standard
map (Li et al., 2015). Figure 6 analyzes the iteration
points distribution of the standard map in the phase
space and the adjacent qualitative and quantitative
trajectories. Using the original Standard map of the
chaotic state as a robot path planner generator to
perform the surveillance mission is a good choice
except for its large distance of the chaotic trajectories
between the iteration adjacent intermediate points.
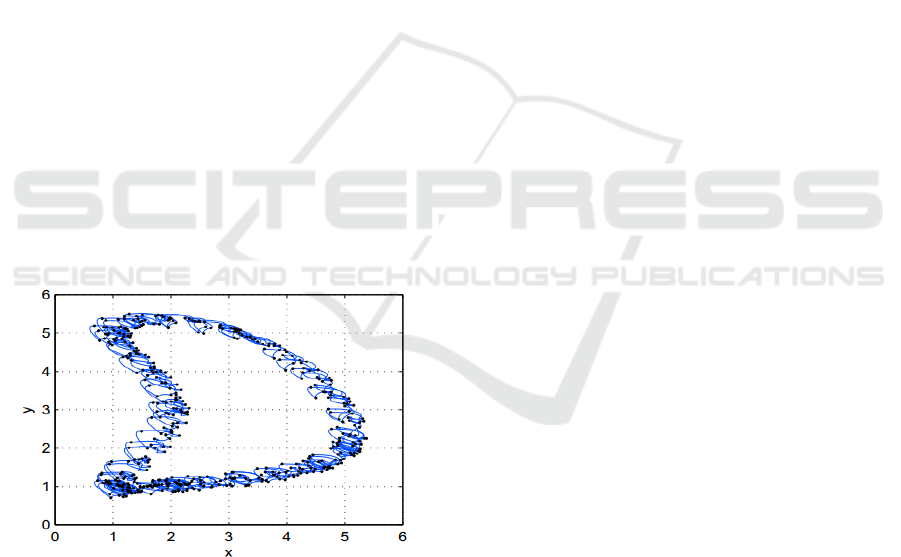
To accomplish boundary surveillance missions
for mobile robots, Curiac and Volosencu proposed
an improved chaotic path planning technique
(Curiac and Volosencu, 2014). This study underpin-
ned the testing and design of a chaotic controller
incorporating a known chaotic equation. While
performing monitoring and research tasks, the
chaotic trajectories for autonomous robots had a
great enhancement over other methods. Security
patrol, fire fighting and cleaning were included in
the proposed applications of chaotic mobile robots.
As depicted in figure 7, the authors started with the
periodic motion on a closed contour of a reference
frame in which the Henon chaotic system would
evolve. They proved that the compound trajectories
obtained in the fixed frame were also chaotic. Based
on this result, they developed an original method to
create chaotic trajectories in the proximity of any
arbitrary boundary shape.
Figure 7: Chaotic robot path in the proximity of a closed
curve (two complete laps along the guiding line) (Curiac
and Volosencu, 2014).
These efforts show that the application of the chaotic
behaviour of dynamic systems for the planning of
mobile robot movements is a fascinating
interdisciplinary research field.
Unlike other path planning methods, chaotic path
planning does not require a map of the workspace
and it is more efficient than the random walk
algorithm. With various chaos equations, a robot
could exhibit a range of motion paths. The chaotic
controllers can be implemented by embedding
simple chaotic circuits into the robots. Chaotic
trajectories are generated using state variables of
dynamical systems, which are used as input for the
wheels of differential-drive robots.
5 CONCLUSIONS
This paper presents the concept of chaos, which
leads to several understandings of chaos. The theory
of chaos reveals our inability to make long-term
predictions of these deterministic dynamic systems.
Chaotic dynamics can be explained, measured and
categorized using this theory. The growth of research
on chaos is highlighted by the interdisciplinary nature
of the field. Due to several applications in electrical
appliances, the application of deterministic chaos has
attracted a lot of attention. The deterministic chaos
has been perceived as unpredictable and unstable, and
therefore worthless. Over the past decades, its
usefulness and application have been recognized.
Like other fields of science and technology, chaotic
dynamics have been discovered and implemented in
various fields of robotics.
In addition, some efforts for uncovering the
chaotic behaviour of various robots are presented.
This part provides basic knowledge about the
common methods and processes involved in finding
the evidence for the existence of chaos in robotic
motion, which can help in better applications of
chaos to real robots.
REFERENCES
Aihara, K. 2012. Chaos and its applications. Procedia
IUTAM, 5, 199-203.
Arneodo, A., Coullet, P. & Tresser, C. 1981. Possible new
strange attractors with spiral structure. Communica-
tions in Mathematical Physics, 79, 573-579.
Azar, A. T. & Vaidyanathan, S. 2014. Computational
intelligence applications in modeling and control,
Springer.
Azar, A. T. & Vaidyanathan, S. 2015. Chaos modeling
and control systems design, Springer.
Bouallegue, K. 2015a. Chaotic attractors with separated
scrolls. Chaos: An Interdisciplinary Journal of
Nonlinear Science, 25, 073108.
Bouallegue, K. 2015b. Gallery of chaotic attractors
generated by fractal network. International Journal of
Bifurcation and Chaos, 25, 1530002.
Chen, G. & Ueta, T. 1999. Yet another chaotic attractor.
Chaos Engineering and Control in Mobile Robotics Applications
369

International Journal of Bifurcation and chaos, 9,
1465-1466.
Chua, L. O., Wu, C. W., Huang, A. & Zhong, G.-Q. 1993.
A universal circuit for studying and generating chaos.
I. Routes to chaos. IEEE Transactions on Circuits and
Systems I: Fundamental Theory and Applications, 40,
732-744.
Curiac, D.-I. & Volosencu, C. 2014. A 2D chaotic path
planning for mobile robots accomplishing boundary
surveillance missions in adversarial conditions.
Communications in Nonlinear Science and Numerical
Simulation, 19, 3617-3627.
Feki, M. 2004. Synchronization of chaotic systems with
parametric uncertainties using sliding observers.
International Journal of Bifurcation and Chaos, 14,
2467-2475.
Gaponov-Grekhov, A. V. & Rabinovich, M. I. 2011.
Nonlinearities in Action: Oscillations Chaos Order
Fractals, Springer Publishing Company, Incorporated.
Garfinkel, A. 1992. Controlling cardiac chaos. Science.
Hanias, M., Giannis, I. & Tombras, G. 2010. Chaotic
operation by a single transistor circuit in the reverse
active region. Chaos: An Interdisciplinary Journal of
Nonlinear Science, 20, 013105.
Hanias, M. & Tombras, G. 2009. Time series cross
prediction in a single transistor chaotic circuit. Chaos,
Solitons & Fractals, 41, 1167-1173.
Hanias, P. M., Nistazakis, H. E., Tombras, G. S., 2010.
Study of an optoelectronic chaotic circuit.
International Interdisciplinary Chaos Symposium on
Chaos and Complex Systems, Istanbul, Turkey.
Jemaâ-Boujelben, S. B. & Feki, M. 2016. Synchronisation
of chaotic permanent magnet synchronous motors via
adaptive control based on sliding mode observer.
International Journal of Automation and Control, 10,
417-435.
Kaygisiz, B. H., Karahan, M., Erkmen, A. M. & Erkmen,
I. 2011. Robotic approaches at the crossroads of
Chaos, fractals and percolation theory. Applications of
Chaos and Nonlinear Dynamics in Engineering-Vol.
1. Springer.
Kiani-B, A., Fallahi, K., Pariz, N. & Leung, H. 2009. A
chaotic secure communication scheme using fractional
chaotic systems based on an extended fractional
Kalman filter. Communications in Nonlinear Science
and Numerical Simulation, 14, 863-879.
Kuznetsov, N. 2016. The Lyapunov dimension and its
estimation via the Leonov method. Physics Letters A,
380, 2142-2149.
KUZNETSOV, N., ALEXEEVA, T. & LEONOV, G.
2016. Invariance of Lyapunov exponents and
Lyapunov dimension for regular and irregular
linearizations. Nonlinear Dynamics, 85, 195-201.
Leonov, G. A. & Kuznetsov, N. V. 2013. Hidden
attractors in dynamical systems. From hidden
oscillations in Hilbert–Kolmogorov, Aizerman, and
Kalman problems to hidden chaotic attractor in Chua
circuits. International Journal of Bifurcation and
Chaos, 23, 1330002.
Li, C., Song, Y., Wang, F., Liang, Z. & Zhu, B. 2015.
Chaotic path planner of autonomous mobile robots
based on the standard map for surveillance missions.
Mathematical Problems in Engineering, 2015.
Li, C., Wang, F., Zhao, L., Li, Y. & Song, Y. 2013. An
improved chaotic motion path planner for autonomous
mobile robots based on a logistic map. International
Journal of Advanced Robotic Systems, 10, 273.
Lin, T.-C., Lee, T.-Y. & Balas, V. E. 2011. Adaptive
fuzzy sliding mode control for synchronization of
uncertain fractional order chaotic systems. Chaos,
Solitons & Fractals, 44, 791-801.
Lorenz, E. N. 1963. Deterministic nonperiodic flow.
Journal of the atmospheric sciences, 20, 130-141.
Lü, J. & Chen, G. 2002. A new chaotic attractor coined.
International Journal of Bifurcation and chaos, 12,
659-661.
Martins-Filho, L. S. & Macau, E. E. 2007. Trajectory
planning for surveillance missions of mobile robots.
Autonomous Robots and Agents. Springer.
May, R. M. 1976. Simple mathematical models with very
complicated dynamics. Nature, 261, 459-467.
Moon, F. C. Chaotic and Fractal Dynamics. Introduction
for Applied Scientists and Engineers: John Wiley &
Sons.
Morrison, F. 2012. The art of modeling dynamic systems:
forecasting for chaos, randomness and determinism,
Courier Corporation.
Nakamura, Y. & Sekiguchi, A. 2001. The chaotic mobile
robot. IEEE Transactions on Robotics and
Automation, 17, 898-904.
Pecora, L. M. & Carroll, T. L. 1990. Synchronization in
chaotic systems. Physical review letters, 64, 821.
Pham, V., Volos, C. K., Vaidyanathan, S., Le, T. & Vu, V.
2015. A memristor-based hyperchaotic system with
hidden attractors: dynamics, synchronization and
circuital emulating. Journal of Engineering Science
and Technology Review, 8, 205-214.
Rössler, O. E. 1976. An equation for continuous chaos.
Physics Letters A, 57, 397-398.
Rulkov, N. F., Sushchik, M. M., Tsimring, L. S. &
Abarbanel, H. D. 1995. Generalized synchronization
of chaos in directionally coupled chaotic systems.
Physical Review E, 51, 980.
Salah Nasr, K. B., Hassen Mekki 2015. Hyperchaos Set
By Fractal Processes System 8th International
CHAOS Conference Proceedings Henri Poincare
Institute, Paris, France
Sánchez-López, C., Trejo-Guerra, R., Munoz-Pacheco, J.
& Tlelo-Cuautle, E. 2010. N-scroll chaotic attractors
from saturated function series employing CCII+ s.
Nonlinear Dynamics, 61, 331-341.
Senejohnny, D. M. & Delavari, H. 2012. Active sliding
observer scheme based fractional chaos synchroniza-
tion. Communications in Nonlinear Science and
Numerical Simulation, 17, 4373-4383.
Sun, J., Shen, Y., Wang, X. & Chen, J. 2014. Finite-time
combination-combination synchronization of four
different chaotic systems with unknown parameters
via sliding mode control. Nonlinear Dynamics, 76,
383-397.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
370

Tang, Y. & Fang, J.-A. 2010. Synchronization of N-
coupled fractional-order chaotic systems with ring
connection. Communications in Nonlinear Science
and Numerical Simulation, 15, 401-412.
Testa, J., Pérez, J. & Jeffries, C. 1982. Evidence for
universal chaotic behavior of a driven nonlinear
oscillator. Physical Review Letters, 48, 714.
Tigan, G. & Opriş, D. 2008. Analysis of a 3D chaotic
system. Chaos, Solitons & Fractals, 36, 1315-1319.
Vaidyanathan, S. 2013. Analysis and adaptive
synchronization of two novel chaotic systems with
hyperbolic sinusoidal and cosinusoidal nonlinearity
and unknown parameters. Journal of Engineering
Science and Technology Review, 6, 53-65.
Vaidyanathan, S. 2015a. Adaptive backstepping control of
enzymes-substrates system with ferroelectric
behaviour in brain waves. International Journal of
PharmTech Research, 8, 256-261.
Vaidyanathan, S. 2015b. Adaptive biological control of
generalized Lotka-Volterra three-species biological
system. Int J PharmTech Res, 8, 622-631.
Van Der Pol, B. & Van Der Mark, J. 1927. Frequency
demultiplication. Nature, 120, 363-364.
Van Wyk, M. & Steeb, W. 1997. Chaos in Electronics,
series Mathematical Modelling: Theory and
Applications, Vol. 2. Kluwer Academic Publishers,
Dordrecht, The Netherlands.
Volos, C. K., Bardis, N., Kyprianidis, I. M. & Stouboulos,
I. N. 2012a. Implementation of mobile robot by using
double-scroll chaotic attractors. Recent Researches in
Applications of Electrical and Computer Engineering,
119-124.
Volos, C. K., Bardis, N., Kyprianidis, I. M. & Stouboulos,
I. N. 2012b. Motion control of a mobile robot based on
double-scroll chaotic circuits. WSEAS Trans. Systems,
11, 479-488.
Volos, C. K., Doukas, N., Kyprianidis, I., Stouboulos, I. &
Kostis, T. Chaotic autonomous mobile robot for
military missions. Proceedings of the 17th
International Conference on Communications, 2013a.
Volos, C. K., Kyprianidis, I. & Stouboulos, I. 2012c.
Motion control of robots using a chaotic truly random
bits generator. Journal of Engineering Science and
Technology Review, 5, 6-11.
Volos, C. K., Kyprianidis, I., Stouboulos, I., Tlelo-
Cuautle, E. & Vaidyanathan, S. 2015a. Memristor: A
new concept in synchronization of coupled
neuromorphic circuits. Journal of Engineering Science
and Technology Review, 8, 157-173.
Volos, C. K., Kyprianidis, I. M. & Stouboulos, I. N.
2012d. A chaotic path planning generator for
autonomous mobile robots. Robotics and Autonomous
Systems, 60, 651-656.
Volos, C. K., Kyprianidis, I. M. & Stouboulos, I. N.
2013b. Experimental investigation on coverage
performance of a chaotic autonomous mobile robot.
Robotics and Autonomous Systems, 61, 1314-1322.
Volos, C. K., Pham, V.-T., Vaidyanathan, S., Kyprianidis,
I. & Stouboulos, I. 2015b. Synchronization
Phenomena in Coupled Colpitts Circuits. Journal of
Engineering Science & Technology Review, 8.
Wang, X.-Y. & Song, J.-M. 2009. Synchronization of the
fractional order hyperchaos Lorenz systems with
activation feedback control. Communications in
Nonlinear Science and Numerical Simulation, 14,
3351-3357.
Zhang, J. & Tang, W. 2012. A novel bounded 4D chaotic
system. Nonlinear Dynamics, 67, 2455-2465.
Chaos Engineering and Control in Mobile Robotics Applications
371
