
Atlas - Examining the Wider Context of Assistive Robotics
H. D. Doran
1
, S. Neumann
2
, H. K. Becker
2
, A. Kollmar
2
, S. Misoch
3
, C. Pauli
3
,
S. Müller
4
and F. Hannich
4
1
Institute of Embedded Systems, Zürich University of Applied Sciences, Winterthur, Switzerland
2
Institute of Occupational Therapy, Zurich University of Applied Sciences, Winterthur, Switzerland
3
Interdisciplinary Competence Centre for Ageing IKOA-FHS, University of Applied Sciences St. Gallen,
St. Gallen, Switzerland
4
Institute of Marketing Management, Zurich University of Applied Sciences, Winterthur, Switzerland
Keywords: Elderly Care Robotics, Assisted Living, Assistive Robotics.
Abstract: We examine the proposition of a stationary assistive robot arm in the kitchen. Based on a preliminary
business plan and with the aim of generating engineering requirements, a multi-disciplinary project was
established to examine the wider ramifications of such assistive technology in the household, in a Swiss
context, in the fields of health and social wellbeing. Additionally the engineering aspects as well as the
business aspects were examined. We detail both the individual methodologies used in this study, the results
achieved and discuss the results in a wider context.
1 INTRODUCTION
1.1 Motivation
Over the course of a masters level business plan
creation week a group of engineering students
produced a well-argued business plan for a kitchen
assistant robot they called ATLAS. Given the current
interest in assistive robotics but cognisant of the fact
that complete understanding of the application area
was out of scope for the normal robotics engineer it
was decided to construct a multi-disciplinary
consortium to examine the proposal in a more
structured manner. This paper describes the results
achieved (Neumann 2016).
The novelty in this paper is that we focus on the
elderly still resident in their own homes in the
context of enabling them to remain there longer
rather than servicing those in care-homes or those
with constrained movement abilities.
1.2 Consortium and Task
The driving task was to establish engineering
requirements for a robotic assistive arm in the
kitchen guided by the scenario of an elderly person
cooking. The task of the consortium was to establish
whether and in what form a robotic assistive arm was
an acceptable accessory for elderly people in their
household kitchens. The consortium was designed to
complement engineering in domains where
engineering researchers traditionally have no specific
knowledge in this case business, health and social
research. In addition to the research consortium,
expertise from the Swiss national organisation
representing interests of the elderly, Pro Senectute,
was requested and granted. Funding was granted by
the Walder Stiftung.
1.3 Value of Paper and Structure
A large number of assistive robotic projects are
generated by engineering research and less by
market requirements, an exception to this are
assistive robotics for special needs patients. To a
large part, the value of this paper is an indication of
how projects with collaborators from different
disciplines can help generate engineering
specifications or, as in our case, show that an
imagined product might not find a market. We also
show that user requirements are a qualitative and not
quantitative research area and different approaches,
whilst converging on a common solution, offer
greater understanding of the problem domain as well
as otherwise easily missed nuances so this paper also
396
Doran, H., Neumann, S., Becker, H., Kollmar, A., Misoch, S., Pauli, C., Müller, S. and Hannich, F.
Atlas - Examining the Wider Context of Assistive Robotics.
DOI: 10.5220/0006885203960402
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 2, pages 396-402
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
serves to illustrate the techniques used by other
disciplines to interested researchers.
This position informs the general structure of the
paper. The next section deals with the engineering
element of this project, Section III, which is further
sub-divided by competence domain, examines the
problem space by that domain. The final section
draws appropriate conclusions and details future
work suggestions.
1.4 Initial Engineering Position
The engineering work consisted of three main tasks,
the establishment of the proposed system capabili-
ties, an advisory position within the consortium and
the development of a mock-up system.
1.4.1 System Proposal
In order to give the other researchers a visualisation
of the system preliminary usability studies were
commissioned. The results, which were presented to
the other researchers, are shown in the figures below.
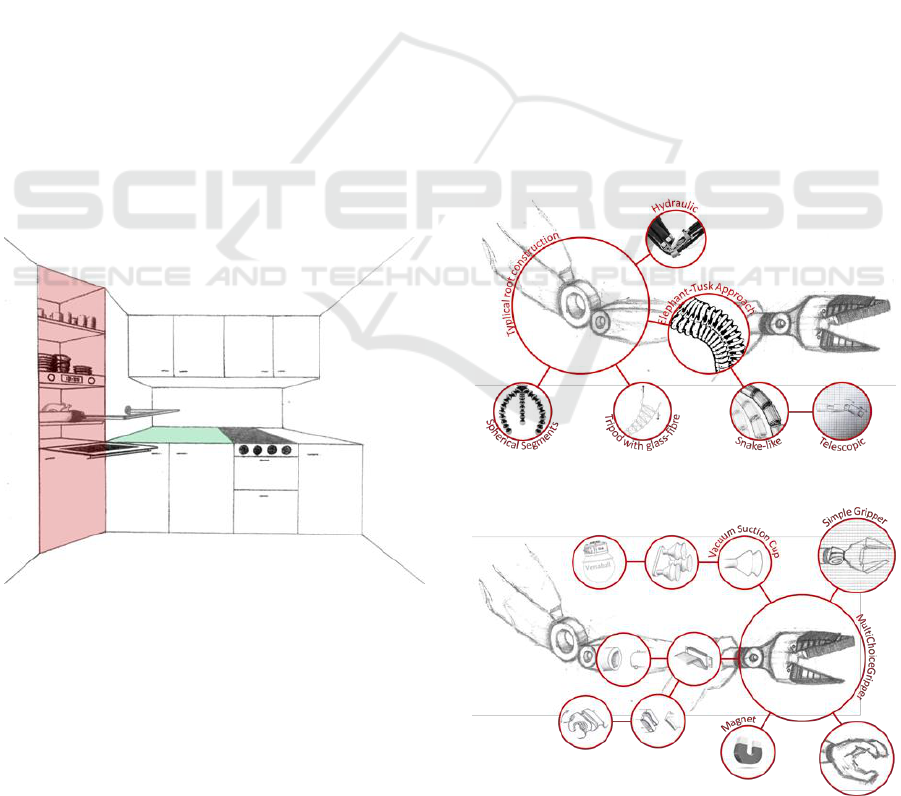
The initial proposition was that there would be a unit
in the kitchen dedicated to the heavy elements used
in cooking, plates, pounds of sugar or rice etc. and
the oven itself, or more specifically the contents
thereof (Figure 1).
Figure 1: Kitchen setup with assistive robot arm attached
to wall. The vertical shaded area is a kitchen unit designed
for access by the assistive arm. The arm is shown reaching
for a roast chicken in the oven. The shaded horizontal area
is the workspace accessible by the assistive arm.
The morphology of the assistive arm was also
considered important. The initial assessment
considered factors such as number of joints and
structure (Figure 2), the rendering of the arm and
gripper, the form and technology of the gripper
(Figure 3) and whether the rendering would be part
of the control system of the arm or not. Significant
engineering uncertainties were associated with the
rendering of the arm and the gripper, various ideas
from artificial skin to wood were considered before
it was decided to hand this issue over to researchers
from another domain.
2 INTERDISCIPLINARY
RESEARCH
2.1 Further Engineering Work
Independently of the main body of work an
engineering mock-up of a possible assistive arm was
commissioned (Bucher 2016). The work was
temporally staggered with that of the other research
groups. No results of this body of work were shared
with the non-engineering researchers for several
reasons. The first was because of uncertainties of the
design work. Engineering was cognisant of the fact
that because the initial design was starting from the
same knowledge base as the rest of the project,
Figure 2: Possible arm morphologies.
Figure 3: Possible gripper morphologies.
Atlas - Examining the Wider Context of Assistive Robotics
397
several design iterations would be necessary to reach
acceptable price and optic points.
It was also feared that early insight to the
engineering ideas would create a prejudice on the part
of the other researchers who may have less realistic
expectations of the ability of engineering to create an
optically acceptable prototype. Another reason was to
avoid anticipating a solution with the other research-
ers. A fourth was to avoid any specific discussions in
focus groups about the optics of the device. This
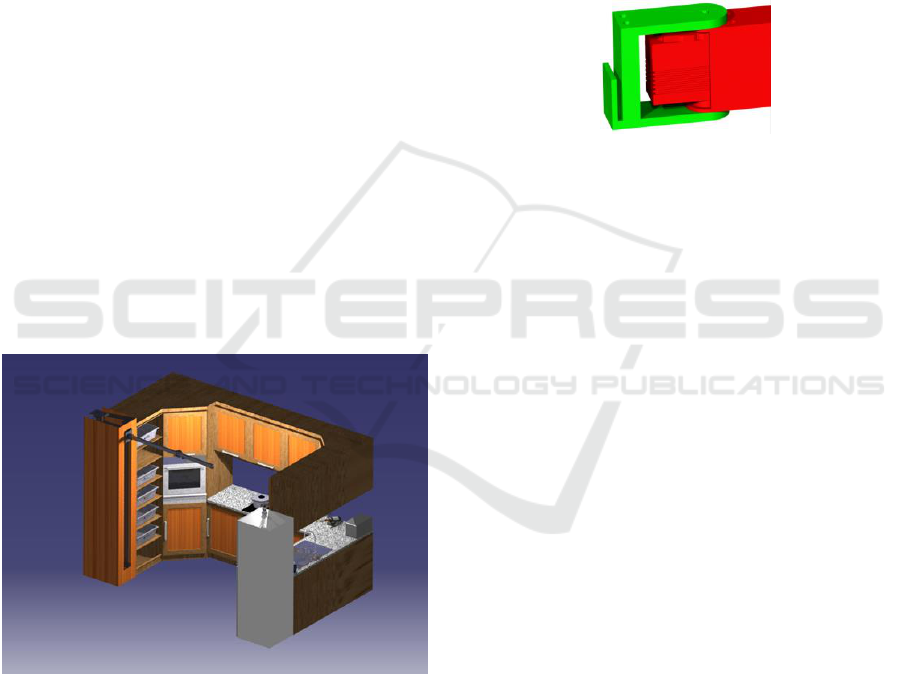
mock-up was advanced as far as a simulation and the
drawings and specifications for production of a
prototype including pricing (Figure 4.)
The general features of the assistive arm are a
two-axis arm with a spindle drive for the vertical
direction. The arm can carry 10 kg load and deposit
trays on the work surface on the left of the sink. A
simple hook-like gripper was chosen (Figure 5). The
unit mechanics were designed to allow a self-stow
along the top of the adjoining kitchen elements.
Initial costing for the mechanics, without the
cladding to suit the kitchen design, without the
shelf/oven elements, and without the electronic
control units but including the drives, was estimated
to be around 4’100 CHF calculated with one-off
pricing. Based on these criteria the finished design,
again without cladding and shelf and oven elements,
could retail for about 15’000 CHF.
Figure 4: Simulation of an assistive kitchen arm (far left).
The arm moves up and down and can place/extract trays
from the shelving beside it onto the work surface as well
as move objects in and out of the oven.
2.2 Social Significance of the Kitchen
2.2.1 Motivation
The introduction of a significant technical invest-
ment into the living space may cause a change as the
family learn to live with, and around, such a device.
Electric light or the television are most obvious
examples but the introduction of an assistive robot
arm in the kitchen may, or may not, also represent a
dislocation in the accepted fabric of rooms and their
use by a family and this was the question being
asked in this part of the study. This is a
fundamentally different question as to the acceptance
of such a unit as a technical object as asked in the
next part of the study where the question was based
in reference to the failing physical abilities of the
elderly and the micro-conditions under which such a
unit might be used.
Figure 5: Chosen gripper for the mock-up. There is a drive
integrated in the joint and the end is designed to hook into
the trays and oven door.
2.2.2 Methodology
Two group interviews were organised to establish
the significance of the kitchen in a social context for
the family. The group interview is a structured
interview process which consists of the answering of
pre-prepared open or partially standardised questions
by the interviewees. There is the possibility for the
interviewees to react to and discuss the answers of
the other participants (Misoch 2015).
The first group consisted of two women and one
man between the ages of 70 and 80 all of whom were
married and all of whom have children and
grandchildren. In both cases, the women were
responsible, as homemakers, for kitchen and
household.
The second group consisted of five women and
two men between the ages of 75 and 89. These
participants all had reduced motor-function due to
arthritis, rheumatism, after-effects of strokes, failing
strength in back and arms etc. and were all living in
separate flats in the same housing scheme with each
flat designed for people of that general health
category.
2.2.3 Scope and Results
The three themes researched were the kitchen,
cooking and problems cooking or in the kitchen.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
398

Kitchen. In all cases the kitchen was considered
more of a functional room than a social room and
like most functional rooms it was important that
everything could be properly stored, and was ready
to be used when required. It represented a
personalised optimisation between aesthetics and
functionality in that kitchen machines that were used
on a daily basis might occupy permanent space on a
kitchen counter. New technology in the kitchen was
in all cases acceptable.
The idea of the purely functional room was often
qualified depending on the available space where
children and husband could talk about the day whilst
the mother was cooking.
The study showed that the meaning of the kitchen
as a social/functional space did not change as much
as the act of cooking during the aging time-span and
that the participants increased their reliance on
kitchen machinery, for instance automated bread-
slicers, as their physical robustness deteriorated as
they aged.
Problems Working in the Kitchen. Issues with
working in the kitchen with increasing age and the
effects, after effects and slow recovery from diseases
could be divided into four categories. Pain whilst
cooking, decreasing strength in hands, arms and
back, changing body sizes and declining strength
during cleaning after cooking.
Pain was often ignored especially when preparing
meals for the partner whereby the scope of the
individual meals and the range of foodstuffs
prepared was significantly reduced, based in part on
the avoidance of pain. The decline in strength, be it
from increasing age or as a result of illness, resulted
in the increased use of electrical and mechanical
appliances and the avoidance of certain heavy
objects, particular pans or pots etc. In both cases the
work-flow, so to speak, was optimised and carried
out at a slower pace to cope with the hindrances.
The changes in body size with age generally
effected the ability to reach things in higher
cupboards and resulted in a rearrangement of the
contents of the storage in the kitchen, which also
resulted, in one case, with the dishwasher being used
to store things.
Finally cleaning after cooking was considered so
problematic that this becomes a reason not to cook
for guests, an effect more pronounced with
individuals who place importance on cleanness and
orderliness.
Cooking. Also questioned was the change of the
importance of cooking as such in a household. In
summary whilst women of that generation may or
may not have experienced fulfilment in cooking, that
function really began with the founding of a family.
The importance of cooking as a social act declines to
a certain extent, especially when the children leave
home, so whilst regular preparation of meals, and
shopping for ingredients, helps structure the day, the
number of complex meals prepared at home tends to
reduce to special occasions. While this also results in
a decline in the ability to manage the cooking of
larger (multi-course) meals it is not seen as a loss
mainly due to the change in appetite and the increase
in available time that reduction of cooking effort
affords. Of course the option of a restaurant for
special occasions was frequently mentioned.
2.3 Acceptance Study
2.3.1 Motivation
Having established that a robotic assistive arm is not
necessarily an intrusion in the personal sphere of the
inhabitants of the dwelling where it is to be installed,
it is important that the articulation of the robot
addresses the needs of the users. Given the
physiological nature of the intended function, in
other words the substitution of specific human
movements due to weakness and pain, health
researchers examined the requirements for
acceptance of a robotic arm in a kitchen
environment.
2.3.2 Methodology
In a first of two work packages, a literature study
was undertaken to identify the difficulties the
elderly, or disabled have while working in the
kitchen and from which requirements on an assistive
robot arm can be established. Then the acceptance
criteria of new technology in the kitchen was
examined and finally a review and critical analysis of
research projects in this field compiled.
The conclusions of this work package were to be
used to inform and guide the constitution and
questioning of focus groups that were to be
organised in the second work package.
The methodology of the first part was to use
databases to find papers on kitchen robotics,
unsurprisingly few papers could be found on this
theme so the search was widened to include general
household robots. After filtering out double hits and
Atlas - Examining the Wider Context of Assistive Robotics
399

those (13) dealing with robot technicalities without
discussing user-experience, 27 papers were included
for further study. From these information and data was
gleaned concerning the problems and limitations of the
elderly in everyday situations, this was used to
generate initial requirements for household/kitchen
robotics. In the third step the acceptance criteria for
technology in household/kitchen robotics was
determined, with particular focus on apprehensions
and fears/suspicions of the target group with respect to
the Technology-Acceptance Model (TAM, Venkatesh
2000).
The methodology applied in the second work
package was to (attempt to) form two focus groups,
one consisting of elderly persons and the other of
people with constrained movement abilities.
Recruitment was very difficult, interestingly enough
those with constrained movement abilities
approached were not interested in technical solutions
believing that they were so constrained that it would
be better for them to learn to live without technical
help. For the elderly focus group only four people
could be recruited.
2.3.3 Scope and Results
Literature Review. The literature review resulted in
the understanding that cleaning help was the most
required assistance in the household (Pigini 2012,
Beer 2012, Ng 2012) followed by reaching for things
and carrying them (Choi 2009, Telson 2013, Beer
2012, Pigini 2012, Fischinger 2016) or holding
things in an assistive capacity (Pigini 2012, Beer
2012). Since potential users, through the literature,
generally accept that that a robot could be useful in a
household, the activities with the planned focus
groups would serve to confirm the literature and help
inform the necessary acceptance criteria which can
be structured according to the TAM.
The TAM informed criteria for questioning the
focus groups – in this case perceived usefulness;
perceived ease; image and technology experience.
The TAM does not recognise differences between
the sexes but Brodbent et. al. (Brodbent 2009) find
substantial difference to what they attribute to the
more emotional approach of women vis a vis the
more clinical approach by men towards technology.
Focus Group(s). Severe difficulties were encounter-
ed in trying to form two focus groups and eventually
only one of seven members could be formed. The
results of the literature could only be partially
predicted. Far more value was placed by the
participants on the difficulties of opening things
(bottles, jars, tins) than moving things from A to B.
In fact a long list of complaints about current bottle
and tin-openers followed. So in terms of the category
perceived usefulness a proposed kitchen assistive
robot was given a task list that it should be able to
perform which began with opening things, carrying
things through cleaning tasks and ending with
peeling vegetables.
The “image” results were less clear. Image in this
context is the effect on a person’s self-image of
being dependent, in this case, on technology. The
one participant with movement restrictions was more
inclined to want to use a robot for a multitude of
tasks whereas most other participants made it
dependent on limited available third-party human
resources – if human help was available however
most would prefer a human to do it.
In terms of technology experience most
participants had enough contact with technology not
to be put off, under the conditions already
mentioned, to consider using it.
The group also considered the practical issues
including general functional characteristics, costs
and general look and feel. It was clearly seen as a
kitchen device and should be in the same category as
a dish washer and/or cooker, it should be able to put
itself away after performing its task and be stationary
not mobile and it should look technical, the idea of it
having human characteristics wasn’t welcomed.
2.4 Business Considerations
2.4.1 Motivation
The business researchers examined the economic
viability of such a product and attempted to identify
the main influencers, those who, in this case, would
influence a potential user to purchase, in this case, an
assistive robot arm.
2.4.2 Methodology
A marketing methodology, under the assumption of a
strategic decision to market a kitchen assistive arm,
was applied. The marketing methodology consists of
several discrete steps generating measureable output
and culminating in the well-known marketing mix of
Price, Product, Place and Promotion (four Ps (Doyle
2006)). Apart from generating guidelines for the
marketing and sales of any technical unit, or washing
powder for that matter, the four Ps can be used to
generate engineering specifications right down to
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
400

packaging, logistics and maintenance policies. The
derivation of the four Ps is via defining a market
development strategy, which in turn is derived from
determining the market aims. The marketing aims
define the demographics, market segments, position-
ing of a product with respect to potential competitors
2.4.3 Scope and Results
From the point of view of an assistive robot arm for
kitchen use the market segment are the elderly and
disabled, the former the larger market by far. The
potential market size was determined by the use of
official statistics qualified by consideration of
various factors. These factors are, amongst others,
the aging characteristics of the target segment, in
other words when and how severely health declines
to a point where such an assistive technology
becomes useful and the duration of residence in the
own-flat before moving to a third-party run residence.
In particular the age from 80 seems to be a critical
period (in Switzerland) which sees a rapid increase in
the requirement for specialised care (Höpflinger 2011,
BfS 2015). Not only is that but the rate of degenerati-
on once a health dislocation has occurred is also rapid.
The ramification of this is that the market segment for
an assistive robot is the age group from 65-80 but the
window of opportunity for the installation of an
assistive robot would appear to be small.
A further hindrance is, at least in the canton of
Zürich, that the average 60 year old has lived in the
same accommodation for 30 years typically in 3-4.5
room apartments, which tend to be relatively small in
Switzerland at 100 m
2
. The length of time lived in
the same space would tend to discourage complica-
ted and inconvenient retro-fits, especially difficult
and expensive in smaller kitchens (Figure 6).
Figure 6: Typical kitchen layout in an older Swiss 3-4
room apartment (comparis.ch).
Whilst the stairs and the bathroom were
considered by the target group to be the main
hindrance in a currently occupied apartment, 36% of
the respondents of a study categorised the kitchen as
also being unsuitable for them (Höpflinger 2014).
The conclusion to be drawn here is whatever the
functionality of an assistive arm, the installation
aspects must be well considered.
The positioning of the solution with respect to
other assistive products, both high- and low-tech and
the strategic pricing options were also analysed.
Unsurprisingly there appear to be no potential
competitors on the market, except possibly for
Moley from the UK, which intends to offer a
complete programmable cooking station (Moley
2015).
Finally the sales channels and, most importantly,
the potential influencers were analysed. In terms of
influencers it was quite clearly determined that
partners and children are the main influencers, in
other words effort must be made to gain acceptance
of (grown-up) children in order to sell such a device.
3 DISCUSSION AND FUTURE
WORK
3.1 Discussion
There are two foci of comparison of the studies
undertaken. The first is the comparison of the results
of the non-engineering studies with each other and
the second the combined results with the output of
the initial engineering mock-up.
Whilst the three non-engineering studies
complement each other they also individually offer
nuances which otherwise might have gotten
unnoticed and so, a more complete picture of a
situation can be built. One theme is the declining
importance of the kitchen as an area in the context of
a family as the offspring leave the house. The kitchen
tasks are reduced in their complexity and frequency.
Despite this reduction in importance the kitchen is still
seen as a necessary workroom by the elderly and
whilst they are, prepared to invest somewhat in
equipment, they exhibit health and strength declines
that makes the use of such a robot merely to move
stuff from A to B an underutilization of a potentially
expensive piece of equipment.
The consequences for engineering is that a more
holistic approach to a kitchen assistive robot than
what was initially conceived as a pick-and-place
Atlas - Examining the Wider Context of Assistive Robotics
401

robot is required. The assistive unit must be able to
help grip things; jars, bottles, tins and the like; assist
in opening them; pour the contents into a pot it has
moved from storage to the stove; clean the tin for
disposal (common in Switzerland); move pots and
pans around the stove and then assist in cleaning the
pots and pans when the cooking activities are
finished. In this light, what is required is a sort of
exo-kitchen machine rather than an assistive help for
the elderly, which might even help dispel the image
issue raised by the acceptance study. The three non-
engineering studies clearly gave sufficient
information to help understand a kitchen situation in
a more structured fashion.
The three non-engineering studies also provided
sufficient guidelines for engineering to design the
look and feel of such a robot. A technical look-and-
feel is acceptable meaning normal kitchen standards
could be applied and, in our opinion, standard
usability features from industrial collaborative
robotics could be applied in adapted form. We also
believe that the mock-up could probably be
considered close to a useful first mechanical
prototype.
3.2 Future Work
As unaware as engineering professionals may be
about the methodologies employed by non-
engineering researchers so are non-engineering
researchers unclear about what engineers need in
order to understand end-user requirements. It might
be worth establishing a methodology to allow non-
engineering researchers to ensure that feedback from
focus groups in their research domain is as
unequivocal as possible.
The research and development of an assistive
robot and its use in real-world situations is not
impossible but its success in the open market would,
based on the presented results, be challenging. Re-
framing the issue scope, as suggested in the previous
sub-section, along the lines of a kitchen machine
might mitigate the negatives out of the presented
study and accentuate the positives for surely, if such
a kitchen machine becomes standard issue the
elderly will benefit as well.
ACKNOWLEDGMENTS
Thanks are due to the Walder Stiftung, Zurich, for
their financial support: to Pro Senectute, Zürich for
their support: and to R. Pfrommer and H.
Hesselbarth, Institute of Mechanical Systems,
ZHAW, for organizing and managing the
engineering mock-up project. Lukas Reisinger,
Institute of Embedded Systems, ZHAW, was
responsible for the initial arm and gripper designs.
REFERENCES
Beer, J. M., Smarr, C. Chen, T. Prakash, A. Mitzner, T.
Kemp, C. Rogers, W.A. 2012 “The Demesticated”.
BfS, Bundesamt für Statistik. “Statistik der Hilfe und Pflege
zu Hause - Ergebnisse 2014: Zahlen und Trends.“ 2015
Neuchâtel: BfS.
Brodbent, E., Stafford R., MacDonald B., 2009 “Acceptance
of Healthcare Robots for the Older Population: Review
and Future Directions,” Int J Soc Robot 1:319-330.
Bucher, S. Di Fazio, L. “Kitchen-Aid”, 2016. Project report
ZHAW, unpublished.
Choi YS., Deyle T., Chen T., Glass J.C., Kemp CC. 2009
“A List of Household Objects for Robotic Retrieval
Prioritized by People with ALS”, IEEE, 11th
International Conference on Rehabilitation Robotics,
Kyoto International Conference Center, Japan, June
23-26.
Doyle, 2006 Marketing Management and Strategy, Prentice
Hall; 4 edition (May 28, 2006)
Fischinger D., Einramhof P., Papoutsakis K., Wohlkinger
W., Meyer P., Panek., Hofmann S., Köertner T., Weiss
a., Argyros A., Vincze M., 2016. Robotics and
Autonomous Systems 75; 60-78.
Höpflinger, F., Bayer-Oglesby, L. & Zumbrunn, A. 2011
Pflegebedürftigkeit und Langzeitpflege im Alter. Bern:
Hans Huber.
Höpflinger, F., Van Wezemael, J. (Hrsg.) 2014. Age Report
III: Wohnen im höheren Lebensalter Grundlagen und
Trends. Zürich: Seismo.
Misoch, S. 2015 “Qualitative Interviews.” Berlin: Walter de
Gruyter.
Moley 2015 http://www.moley.com/ last accessed
16.03.2018
Neumann, S., Becker, H. K., Kollmar, A., Misoch, S., Pauli,
C., Doran, H. D., Müller, S., Hannich, F. 2017.
«Küchenassistenzroboter für Seniorinnen und Senioren:
Bedürfnisse, Akzeptanzfaktoren und Wirtschaftlichkeit.”
In: G. Kempter, I. Hämmerle, (Ed). Umgebungsunter-
stützes Leben. Beiträge zum Usability DayXV (38-44).
15. Lengerich: Pabst.
Ng, J. Tan, O. Wong, A. Kiat, K.W. 2012. “Older Adults'
Attitudes towards Homfes Service Robots,” WASA, 11;
26-27 2012.
Pigini, L. Facal, D. Blasi, L. Andrich, R. 2012. “Service
robots in elderly care at home: Users' needs and
perceptions as a basis for concepts development,”
Technology and Disability 24; 303-311.
Telson J., 2013, Research Update- A Helping Hand in the
Kitchen; PN, 38-40
Venkatesh, V. Davis, F. 2000 “A theoretical extension of the
technology acceptance model: Four longitudinal field
studies.” Management science 46(2), 186–204. 2000.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
402
