
Scalable Supervised Machine Learning Apparatus for Computationally
Constrained Devices
Jorge L
´
opez
1
, Andrey Laputenko
2
, Natalia Kushik
1
, Nina Yevtushenko
2,3
and Stanislav N. Torgaev
2
1
SAMOVAR, CNRS, T
´
el
´
ecom SudParis, Universit
´
e Paris-Saclay, 9 rue Charles Fourier, 91000
´
Evry, France
2
Department of Information Technologies, Tomsk State University, 36 Lenin street, 634050 Tomsk, Russia
3
Ivannikov Institute for System Programming of the Russian Academy of Sciences,
25 Alexander Solzhenitsyn street, 109004, Moscow, Russia
Keywords:
Supervised Machine Learning, Digital Circuits, Constrained Devices, Deep Learning.
Abstract:
Computationally constrained devices are devices with typically low resources / computational power built for
specific tasks. At the same time, recent advances in machine learning, e.g., deep learning or hierarchical or
cascade compositions of machines, that allow to accurately predict / classify some values of interest such as
quality, trust, etc., require high computational power. Often, such complicated machine learning configurations
are possible due to advances in processing units, e.g., Graphical Processing Units (GPUs). Computationally
constrained devices can also benefit from such advances and an immediate question arises: how? This paper
is devoted to reply the stated question. Our approach proposes to use scalable representations of ‘trained’
models through the synthesis of logic circuits. Furthermore, we showcase how a cascade machine learning
composition can be achieved by using ‘traditional’ digital electronic devices. To validate our approach, we
present a set of preliminary experimental studies that show how different circuit apparatus clearly outperform
(in terms of processing speed and resource consumption) current machine learning software implementations.
1 INTRODUCTION
Computationally constrained devices (Bormann et al.,
2014) are devices which are typically built for dedi-
cated tasks, and therefore, even if they include general
purpose processors, computationally complex opera-
tions are unfeasible. With the fast development of the
Internet of Things (IoT), constrained devices got a lot
of attention. Therefore, it is necessary to develop new
methods to reduce the complexity of computation and
at the same time provide the flexibility of modern data
science.
Particularly, providing such constrained devices
with close-to-human inference approaches that use
machine learning is of great interest as IoT devices of-
ten interact with each other relaying mission-critical
operations to their peers. For example, it is typical to
use intermediate IoT devices to route the network traf-
fic to the intended destination. For that reason, trust
management engines that use a machine learning trust
model have been previously presented (see, for exam-
ple (L
´
opez and Maag, 2015)). To avoid the computa-
tional load of training a self-adaptive model (or ma-
chine), the authors proposed to train the machine in
a central and computationally powerful device that is
later queried via a communication protocol (HTTP /
REST). Nonetheless, the constant querying of such a
centralized device might have a negative impact on
the workload, network traffic and battery of a com-
putationally constrained device. Furthermore, verify-
ing the correct behavior of the applications being exe-
cuted in such constrained devices can also be achieved
with the use of machine learning (L
´
opez et al., 2017).
Therefore, the question arises: how to provide
flexible machine learning capabilities which are not
computationally complex in order to integrate them
into computationally constrained devices? Further-
more, is it possible to consider any apparatus to avoid
the computational complexity of hierarchical learning
(see, for example (Tarando et al., 2017)) approaches?
Indeed, the previously stated questions form the prob-
lem statement that this paper aims to solve.
In order to provide a scalable and accurate infer-
ence mechanism, we showcase a procedure for de-
signing a digital circuit, which can be used for pre-
diction based on a data set. Furthermore, to over-
come the problem of synthesizing unknown patterns
in the digital circuit, we propose an inductive ma-
518
López, J., Laputenko, A., Kushik, N., Yevtushenko, N. and Torgaev, S.
Scalable Supervised Machine Learning Apparatus for Computationally Constrained Devices.
DOI: 10.5220/0006908905180528
In Proceedings of the 13th International Conference on Software Technologies (ICSOFT 2018), pages 518-528
ISBN: 978-989-758-320-9
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

chine learning approach. The resulting synthesized
digital circuit captures the prediction power of a com-
plex self-adaptive model and at the same time, it can
be implemented as hardware, or it can be simulated
in a scalable manner. Furthermore, we showcase
that through known digital electronic components,
hierarchical learning / cascade compositions can be
achieved. Our preliminary experimental studies with
different machine learning strategies clearly show that
digital circuit representations are consistently faster,
even when the utilized apparatus is based on simulat-
ing digital circuits.
To the best of our knowledge, little to no attention
has been paid to hardware implementations of self-
adaptive models. Currently, complex self-adaptive
models are reserved for devices with high computa-
tional power with software implementations. How-
ever, some optimized software implementations have
been considered, see for example (Nissen, 2003).
On the other hand, devices designed specifically for
self-adaptive models with powerful / robust process-
ing units exist in the market, see for example (Intel,
2018). Nevertheless, our approach aims at provid-
ing faster and integrated solutions for constrained de-
vices.
The paper is organized as follows. Section 2
presents the preliminary concepts used throughout the
paper. Section 3 presents a motivating example, i.e., a
mobile application case scenario. Section 4 contains
the design methodologies for machine learning appa-
ratus as digital circuits. Section 5 showcases how us-
ing digital circuits, cascade compositions for machine
learning can be effectively developed. Preliminary
experimental results are showcased in Section 6, and
finally, Section 7 concludes the paper and presents our
future research directions.
2 PRELIMINARIES
In this section, we briefly discuss the preliminary con-
cepts used in the paper.
2.1 Supervised Machine Learning
A Supervised Machine Learning algorithm takes as
inputs the examples alongside with their expected out-
puts. Given the inputs and expected outputs, the final
goal is to learn how to map a training example to its
expected output.
Formally, the inputs are called features or param-
eters. A parameter vector, denoted as X, is an n-tuple
of the different inputs, x
1
,x
2
,...,x
n
. The expected
output for a given feature vector is called a label, de-
noted simply as y, and the possible set of outputs is
respectively Y . The set of examples, called a train-
ing or data set, consists of pairs of a parameter vector
and a label; each pair is called a training example,
denoted as (X, y). For convenience, we represent the
data set as a matrix D
m×n
and a vector O
m
where D
contains the parameter vectors and O contains the ex-
pected outputs for a data set of cardinality m. The
vector representing the j-th column is denoted as D
j
.
Likewise, the i-th training example is denoted as D
T
i
(T denotes the transpose of the matrix D) and its as-
sociated expected output as O
i
. Finally, the j-th pa-
rameter of the i-th training example is denoted by the
matrix element d
i, j
.
In general terms, in supervised machine learning,
the objective is to find a function, h(X) called the hy-
pothesis, such that, h : X 7→ Y . A common problem
with supervised machine learning is that the training
set trains the machine with poor generalization; when
this problem occurs, it is called over-fitting. When
machine learning is used to predict only two values
(e.g., Y = {0,1}), the problem is said to be a bi-
nary classification problem. Furthermore, the hyper-
surface that separates the classes of the feature space
is called a decision boundary.
To evaluate the prediction accuracy of a given ma-
chine learning model, a technique known as n-fold
cross-validation is utilized. Cross-validation divides
the original data set into a training set (to train the
model) and a test set (to evaluate the trained model).
Such n-fold cross-validation splits the data set into n
subsets. The model is tested with a single subset (out
of n) and it is trained with the remaining n − 1 sub-
sets. The process is repeated n times for each subset
to be used as the test set. The prediction accuracy is
obtained by averaging the correct prediction rate for
each of the test sets.
2.2 Digital Circuits
A logic network (circuit) consists of logic gates; the
composition is obtained through connecting the out-
put of some gates to the input of others. A logic gate
implements a Boolean function; some of the most
common logic gates are: AND (∧), OR (∨), XOR
(⊕), and NOT ( ). Inputs in the logic network that
are not connected to any other gate are considered
to be primary inputs, and similarly, outputs of the
gates which are not connected to any other gate in-
put are called primary outputs. In this paper, we con-
sider combinational circuits, i.e., loop-free circuits
with no memory elements (latches). A logic circuit
by definition implements (or represents) a system of
Scalable Supervised Machine Learning Apparatus for Computationally Constrained Devices
519
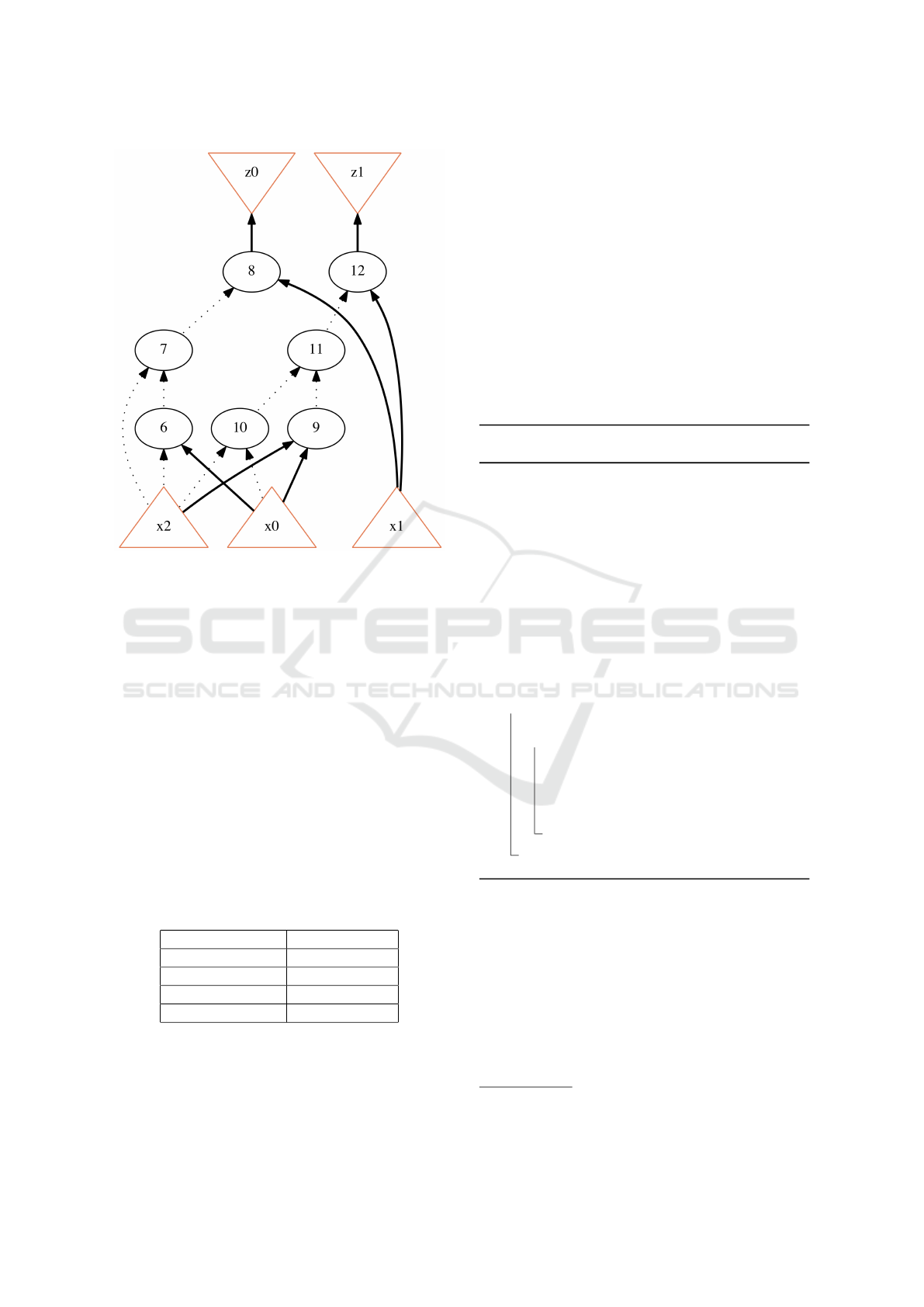
Figure 1: C
ex
Logical Network.
Boolean functions that can be described by a Look-
up-table (LUT). An LUT contains a set of input/out-
put Boolean vectors describing the circuit behavior.
As an example, consider the circuit C
ex
described
by the LUT shown in Table 1; C
ex
is represented by a
logic network in Figure 1. Note that the logic network
has 14 gates, 3 primary inputs ({x0,x1, x2}) and 2 pri-
mary outputs ({z0, z1}). Furthermore, only AND and
NOT gates (the circuit is designed as an And-Inverter
Graph or AIG) are present in the network; AND gates
are represented by the circles while the NOT gates
are depicted as dashed lines. There exist a number
of methods to synthesize a circuit from a system of
Boolean functions or LUTs which can be only par-
tially specified. In this paper, we do not focus on such
methods, however, in order to perform such synthesis,
we use ABC, a tool for logic synthesis and verifica-
tion (Brayton and Mishchenko, 2010).
Table 1: C
ex
LUT.
x0,x1, x2 (inputs) z0,z1 (outputs)
010 01
011 10
111 11
110 10
A Field Programmable Gate Array (FPGA) is
a device which can be reconfigured (programmed)
(Brown et al., 2012) by users, usually through a hard-
ware description language such as Verilog (IEEE,
2017). An FPGA circuit has an array of config-
urable logic blocks and respective communication
channels
1
, to achieve the proper reconfiguration. An
FPGA circuit can be seen as a re-configurable (com-
binational) circuit.
2.2.1 Using Digital Circuits for Prediction
As shown in (Kushik and Yevtushenko, 2015), there
exists an algorithm that synthesizes a digital circuit
that can be used to ‘predict’ values based on a train-
ing data set. A slight modification of this algorithm
is shown in Algorithm 1. For the unknown param-
eter values the circuit can be synthesized based on
the smallest distance to the vectors included in the
LUT (Kushik et al., 2016).
Algorithm 1: Algorithm to synthesize a logic circuit
for prediction.
Input : D
m×n
, a data (training) set, and a
vector of its expected outputs O
m
Output: C, a logic circuit
1. Determine the number of primary inputs and
primary outputs of C:
The number of primary inputs equals
∑
n
i=1
dlog
2
(max(D
i
) + 1)e, where max is a
function that calculates the maximum value
for a vector (for the i-th parameter); likewise,
the number of primary outputs equals
dlog
2
(max(O) + 1)e
2. Derive an LUT L from D and O
2.1. Set L to
/
0
2.2. for i = 1,2, .. ., m do
2.2.1. Set I empty
2.2.2. for j = 1,2,...,n do
2.2.2.1. Set I to I.bin(d
i, j
), where .
denotes the concatenation operator
between two Boolean vectors and bin
a function that transforms its input to
binary encoding
2.2.3. Set L to ∪ {I/O
i
}
3. Synthesize C from L and return C
3 MOTIVATING CASE STUDY
In (L
´
opez et al., 2017), the authors have showcased
how values of the variables in the source code can re-
flect the trustworthiness of a given application. For
that reason, there is a special interest to assure that
the applications running in constrained and mobile
devices are trustworthy. However, what is trustwor-
thiness in the context of a mobile application for
1
FPGAs might also contain memory elements as latches,
however, it is not relevant for our approach.
ICSOFT 2018 - 13th International Conference on Software Technologies
520

a constrained device? First, we should emphasize
that a smartphone might not be considered as a con-
strained device of a very restricted class, i.e., c0, c1,
or c2 (Bormann et al., 2014). Likewise, we do not
consider a high-end smartphone as a computation-
ally constrained device neither. Nonetheless, some of
these devices operate with the minimum requirements
and therefore can be considered as computationally
constrained. Moreover, the minimum requirements to
run ‘modern’ versions of mobile operating systems as
Android 4.4 require a minimum of 340MB of RAM
(Google, 2013). Nonetheless, this memory is utilized
for the operating system kernel and user space, and
for that reason, the memory gets consumed with dif-
ferent applications from the user, including memory-
intensive applications as web browsers. As a conse-
quence, this fact leaves fewer resources for checking
the trustworthiness of such applications. Intuitively,
one of the most important aspects which influences
the trustworthiness of a mobile application is its re-
source utilization. We note that different parameters
might be considered for the resource utilization of a
given mobile application. However, we consider the
following 5 parameters.
1. Heap size: The size of the memory occupied by
the application’s dynamic memory allocation.
2. Stack size: The size of the memory occupied by
the application’s execution thread.
3. CPU usage: The load of the application in per-
centage of utilized CPU(s).
4. Disc usage: The space taken by the application
data.
5. Energy Consumption: The amount of energy con-
sumed by the application.
A very important question that needs to be ad-
dressed is how to estimate the trustworthiness of an
application based on the previously established pa-
rameters. Certainly, if the values of all parameters
are rather big, the application is not trustworthy but,
assuming the application has high disc usage or, low
CPU usage and low heap and stack sizes, perhaps it
means that the application performs some caching and
this is considered trustworthy. What if the trustwor-
thiness of an application is only negatively assessed
when high disc usage is combined with high CPU
usage? Certainly, simple trust management models
are not capable to express complex patterns. How-
ever, the human-cognitive concept of trust can be used
through a self-adaptive model, for example through
the use of a complex machine learning model.
Nevertheless, utilizing such complex machine
learning approach inside a computationally con-
strained device seems rather contradicting. In this pa-
per, we attempt to overcome this complexity through
the replacement of software to hardware solutions.
As shown in Algorithm 1 (Kushik and Yevtushenko,
2015), a digital circuit can be ‘trained’ to produce the
desired result. In the current work, we employ this
technique to predict the trustworthiness of the appli-
cations being executed in the computationally con-
strained devices. We note that this technique seems
suitable given the fact that values in the data set are
small due to its nature, i.e., resource utilization in
a computationally constrained device. Nevertheless,
there exist some limitations in utilizing known strate-
gies for logic synthesis for the binary classification
problem. In the next section, we outline these limita-
tions, and provide solutions to them.
4 DIGITAL CIRCUITS AS
SCALABLE MACHINE
LEARNING APPARATUS
The algorithm to synthesize a digital circuit for ‘pre-
diction’ using a data set (Algorithm 1) has one ma-
jor limitation. In fact, the digital circuit implements
a system of Boolean functions F , where |F | is the
number of primary outputs. Moreover, these func-
tions are partially specified, and the number of train-
ing examples is much smaller than the number of pos-
sible inputs (combinations).
One might think of this problem as the model nat-
urally over-fits to the trained data set. At the same
time, over-defining the behavior of partially speci-
fied functions from F for the tested set is performed
via logic synthesis solutions, and thus the prediction
model is as good as such synthesis can make it. To
better outline the problem, and the proposed solution,
we present the following running example. Assume a
data set D, as shown in Figure 2, with two features,
x1 and x2, where the classes are labeled by o ∈ {0, 1},
the blue x represents a positive (1) class, and the pink
circle represents the negative (0) class.
To synthesize a digital circuit from the data set
D using Algorithm 1, a data transformation is neces-
sary, to only include positive values. To do so, a sim-
ple normalization can be used in this case, by shift-
ing the origin to the minimum point in the feature
space. For example, the point (0,−2) becomes (2,0)
as the minimum point in the feature space is x1 = −2,
and x2 = −2. The circuit C obtained from the data
set D (depicted in Fig. 2) is depicted in Figure 3 (as
an and-inverter graph), where 2-input and gates are
represented by circles, NOT gate is represented by a
dashed line in the connector of the gate to invert, the
Scalable Supervised Machine Learning Apparatus for Computationally Constrained Devices
521
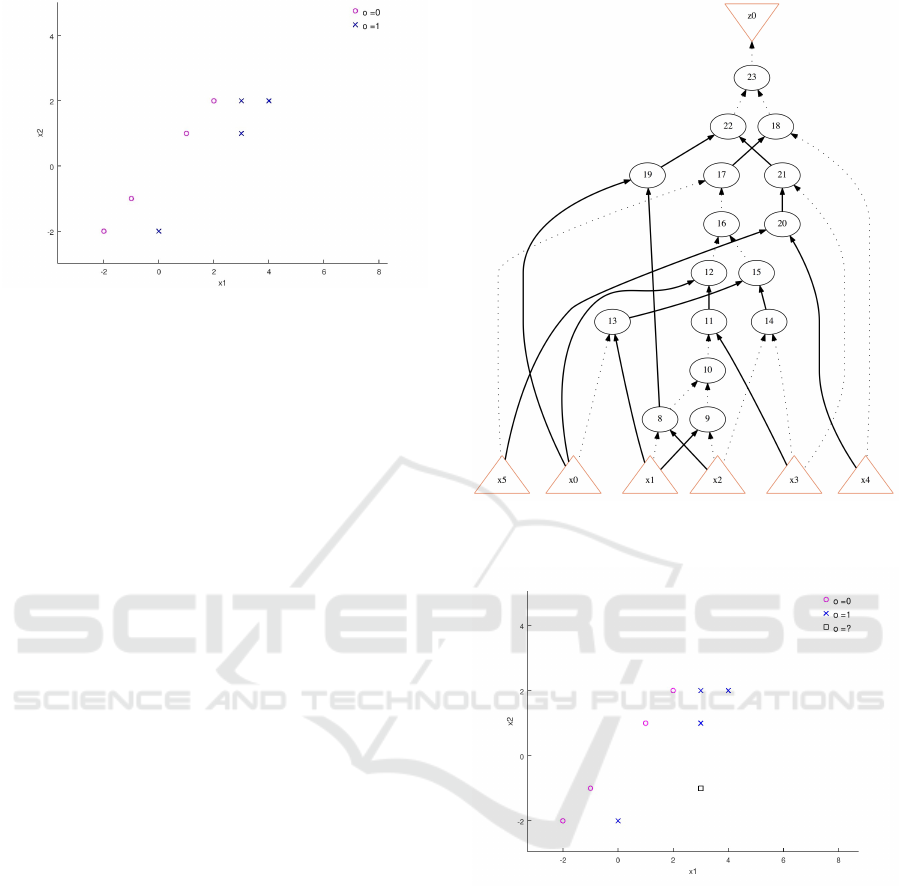
Figure 2: Example data set.
primary inputs are represented in triangles, and the
output is represented as an inverted triangle.
As an example, it can be easily verified that the
input (0,−2) is correctly predicted as 1 using C with
encoded inputs x1 = 0, x2 = 1, x3 = 0, x4 = 0, x5 = 0,
x6 = 0. The encoding process first transforms the in-
put data to the shifted point (2,0), then a binary trans-
formation results in (010000). But, what about the
input (3,−1)? The output of C for the encoded in-
put x1 = 1, x2 = 0, x3 = 1, x4 = 0, x5 = 0, x6 = 1
is 0. One of the possible explanations for this behav-
ior is that the algorithm used to synthesize the circuit
‘considers’ unspecified patterns as 0. Another possi-
bility is that in order to optimize the number of gates,
a particular gate is chosen which for the specified pat-
terns behaves as listed but, behaves different for other
patterns; for example, for the patterns (1, 0) and (0,
1) both OR and XOR gates ‘behave’ equally, but not
for (1,1). Indeed, the algorithm used by ABC (Bray-
ton and Mishchenko, 2010), the tool to synthesize the
circuit C (as shown in Fig. 3) assumes that unseen pat-
terns are 0. However, as shown in Figure 4, this un-
specified input seems to belong to the 1 class. There-
fore, the question arises, how can a circuit which pos-
sesses better generalization of the unseen data be syn-
thesized? Or, in other words, which logic synthesis
approach can be utilized when the criterion of opti-
mality is not a traditional one, such as for example,
the number of gates, the path length from primary
inputs to primary outputs, the surface or circuit pla-
narity, etc. but, the prediction accuracy over the tested
patterns? As mentioned above, for undefined patterns,
the ‘prediction’ circuit can be synthesized based on
the smallest distance to the vectors included in the
LUT.
Figure 3: Digital circuit for ‘predicting’ the class given the
data set D.
Figure 4: Unspecified data pattern.
4.1 An Inductive Machine Learning
Approach
In the literature, different machine learning mod-
els have been proposed to achieve the classification
(Christopher, 2016). Some of these models are widely
adopted. As an example, Support Vector Machines
(SVMs) (Boser et al., 1992) are known to have good
prediction performance regardless of the complexity
and non-linearity of the data. In (L
´
opez and Maag,
2015), an algorithm to train an SVM with high accu-
racy independent from the data is showcased. For the
example data set D, an SVM trained with the latter
ICSOFT 2018 - 13th International Conference on Software Technologies
522
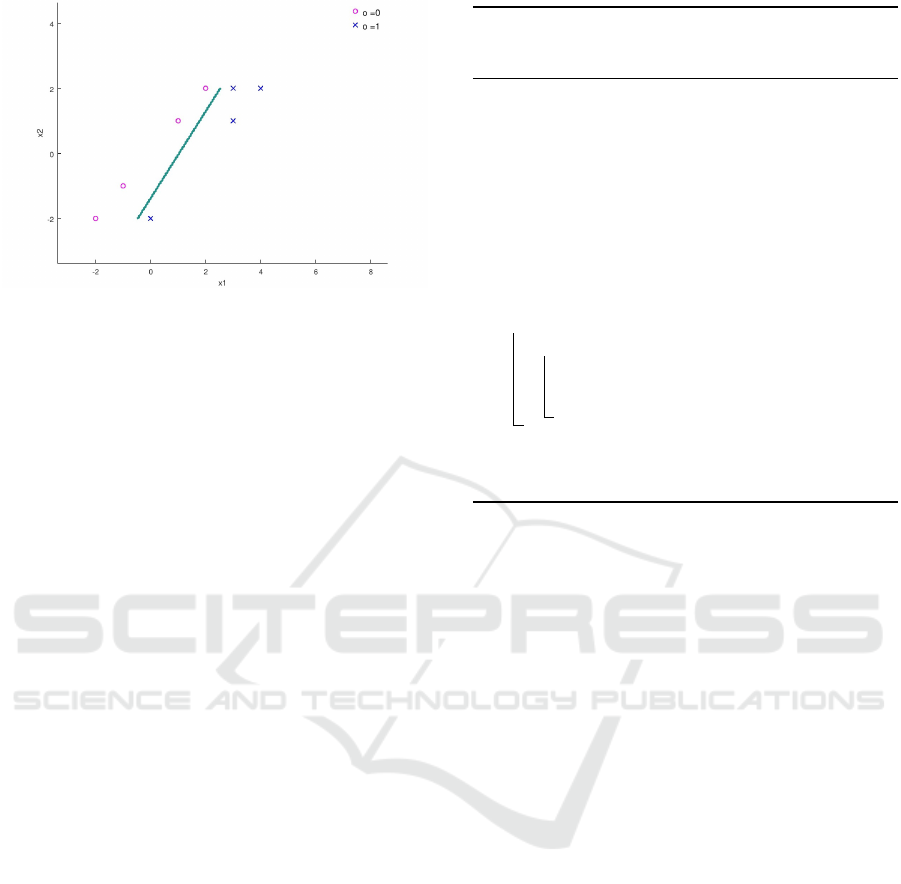
Figure 5: SVM Decision boundary for the dataset D.
mentioned algorithm delivers the decision boundary
as shown in Figure 5.
We propose an inductive approach which ‘learns’
the undefined (unseen) patterns from a model that has
high accuracy and good generalization for prediction.
Generally speaking, the naive algorithm to achieve
that is to train a desired model M (e.g., a SVM), and
use M to predict each of the points of interest to later
add as training examples and to synthesize the cir-
cuit using Algorithm 1. We recall at this point that
under the assumption that the feature space is ‘lim-
ited enough’ this is feasible. However, when dealing
with binary classification, this naive algorithm can be
improved by the use of a heuristic. The heuristic is
straightforward, we take advantage of the fact that
both unseen and 0 patterns are considered as 0. For
that reason, we propose that the training set to syn-
thesize the digital circuit only includes patterns which
are 1.
An interesting conclusion after training the circuit
C with the patterns obtained from M is that the cir-
cuit has the same prediction accuracy of M for cer-
tain bounds of the feature space. For example, all the
training examples that appear in D (the running ex-
ample) can be described as a vector of min/max pairs,
e.g., ((−2,−2), (4,2)). Furthermore, a purely com-
binational digital circuit can be implemented in hard-
ware, and this small apparatus can be integrated into a
computationally constrained device; the performance
of such physical prediction chip is extremely high.
Certainly, another option is to use any hardware de-
scription language together with an appropriate dig-
ital circuit simulator inside the computationally con-
strained device. In Algorithm 2, we present an algo-
rithm that designs a digital circuit with the prediction
power of a complex prediction model. An important
remark is that the algorithm works for any prediction
model with a reasonably bounded feature space.
Algorithm 2: Algorithm to synthesize a logic circuit
for prediction using the values of a trained machine
learning model M.
Input : M a trained machine learning model,
and B = (in f ,sup)
n
,in f , sup ∈ Z, a
vector of n elements representing a
hypercube of the bounded area of
interest for the feature set
Output: C, a logic circuit for prediction
simulating M
0. Set the row index r to 1
1. Set D
0
as an empty matrix of n columns
2. foreach point p ∈ B (inside the bounds of
interest) do
2.1. if M(p) = 1 then
2.1.1. Add p as the r-th row of the D
0
matrix
2.1.2. Increment r
3. Use Algorithm 1 to synthesize a circuit C
from D
0
and 1 (a vector of 1’s of size
m = r − 1), and finally return C
Discussion. It is important to note that Algorithm 2
synthesizes a digital circuit that predicts as accurate as
the given model M predicts for the given hypercube.
Furthermore, the algorithm can be extended so that
it continues ‘learning’ from M, increasing the size of
the hypercube, for example, until a given timeout or
a space limit are reached. Even though this process
sounds computationally expensive / costly, we must
note that this process is to be done only once. On
the other hand, the algorithm can be easily modified
for multi-class classification, considering the outputs
of M to be included into a vector of expected output
responses to o
0
and use it to synthesize C in Step 3.
Finally, we note that this approach is valid for any su-
pervised machine learning model. This implies that
many powerful algorithms such as convolutional neu-
ral networks or any other deep learning (Deng et al.,
2014) approach can be employed.
5 DIGITAL CIRCUITS FOR
CASCADE OR HIERARCHICAL
MACHINE LEARNING
CONFIGURATIONS
In the previous section, we have showcased a proce-
dure to synthesize a digital circuit that is capable of
classifying data with the accuracy of a given machine
learning model. In this section, we discuss how given
a set of the previously synthesized digital circuits, bet-
Scalable Supervised Machine Learning Apparatus for Computationally Constrained Devices
523
ter prediction accuracy can be achieved when a cas-
cade composition of such devices is designed.
To better illustrate our approach, we introduce a
sample data set D2 (with expected outputs O), as
shown in Figure 6. It is certainly possible to train
a single self-adaptive model that separates between
the different classes of D
2
, and furthermore, with
good accuracy. For example, when training an SVM
as suggested in (L
´
opez and Maag, 2015), the cross-
validation accuracy percentage reaches ∼ 96.67%.
However, as seen in D
2
, all classes seem to be lin-
early separable, in exception of classes 3 and 4. Fur-
thermore, if merging classes 3 and 4 as the virtual
class 6 all classes are linearly separable, as shown in
Figure 7; when creating a classifier for the newly cre-
ated data set, a 100% cross-validation accuracy can
be obtained. Likewise, if considering only the 3 and 4
classes in D
2
a classifier with a 100% cross-validation
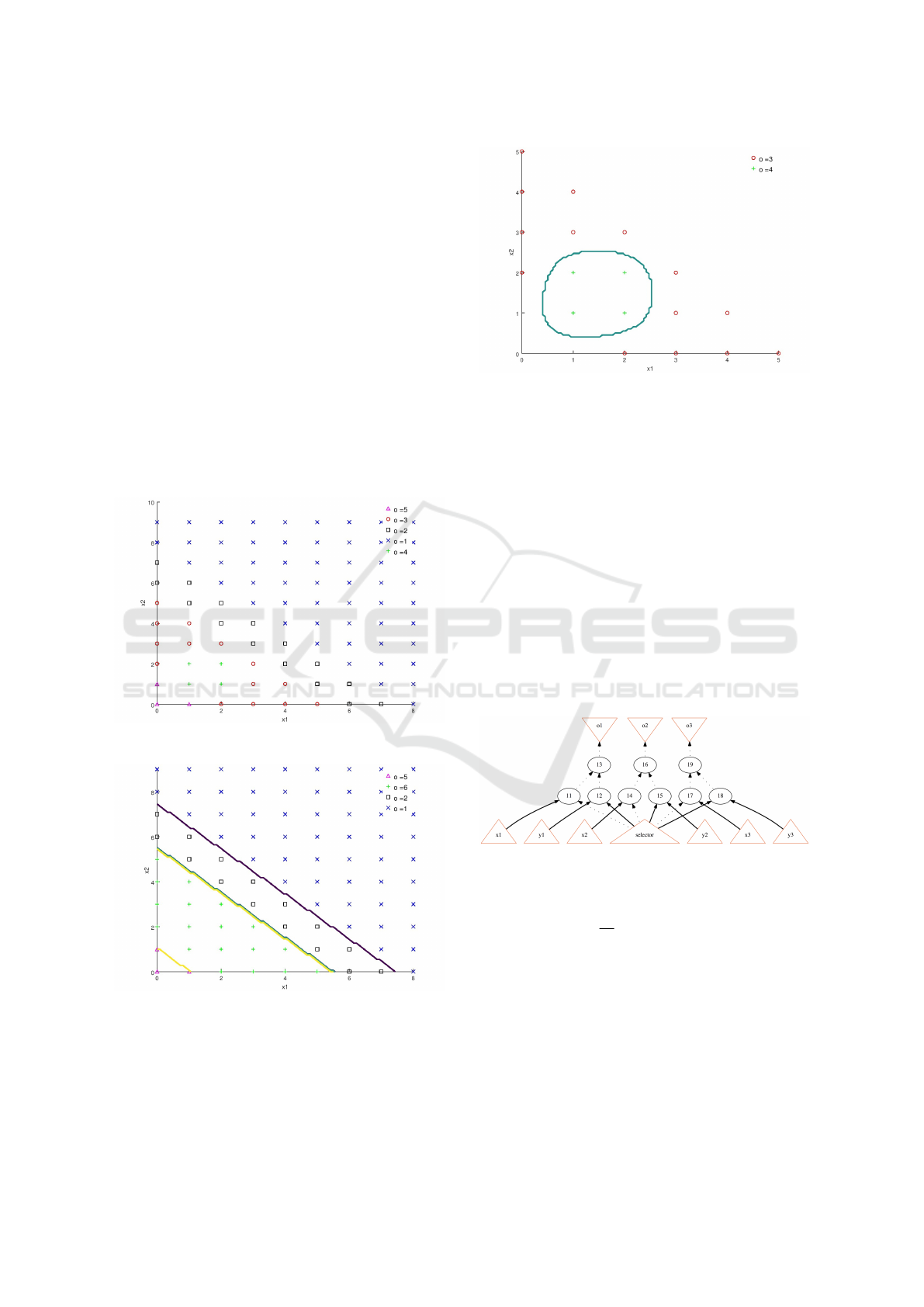
accuracy can be trained (as shown in Figure 8).
Figure 6: Sample Multi-class data set (D
2
).
Figure 7: Classification for D
2
with merged non-linearly
separable classes.
Both classifiers shown in Figures 7 and 8 can
be implemented in two different logic circuits LC1
and LC2 respectively. Nevertheless, how to combine
both prediction circuits? One possible solution is to
use LC1 to classify the data in exception whenever
Figure 8: Classification for classes 3 and 4 of D
2
.
LC1 outputs the class number 6 (LC2 ‘knows’ bet-
ter); when the output class is 6 then use LC2 to de-
cide on the proper class. In the literature, such cas-
cade configurations have been successfully utilized to
accurately predict overlapping classes (see, for exam-
ple (Tarando et al., 2017)). To achieve the desired
cascade configuration, we propose the use of tradi-
tional data selection circuits known as multiplexers.
A multiplexer is a logic circuit that based on the se-
lector chooses from different input signals and repli-
cates the selected input signal to its (single) output.
As an example, consider a binary (two inputs) mul-
tiplexer with 3 primary inputs as shown in Figure 9;
the multiplexer sends to its output the values at the
input values (x1,x2,x3) if the selector input equals 0
and respectively sends (y1,y2, y3) if the selector input
equals 1.
Figure 9: binary 3-input multiplexer.
The resulting configuration is shown in Figure 10.
Note that the circuit LC3 is a very simple circuit im-
plementing the following Boolean function LC3(x1,
x2,x3) = x1 ∧ x2 ∧ x3, which outputs 1 whenever the
output of LC1 is 6 (binary 110). The circuit shown
in Figure 10 has a 100% cross-validation accuracy for
all classes in D
2
.
An algorithm to construct ‘cascade’ compositions
of logic circuits and a multiplexer is shown in Algo-
rithm 3. As an example, the algorithm executed with
inputs LC1, LC2, 6 respectively, produces the circuit
shown in Figure 10 where Mx (BinMux) produces
outputs of the LC1 (the principal classifier) when the
selector (LC3) input is 0 while producing outputs of
ICSOFT 2018 - 13th International Conference on Software Technologies
524
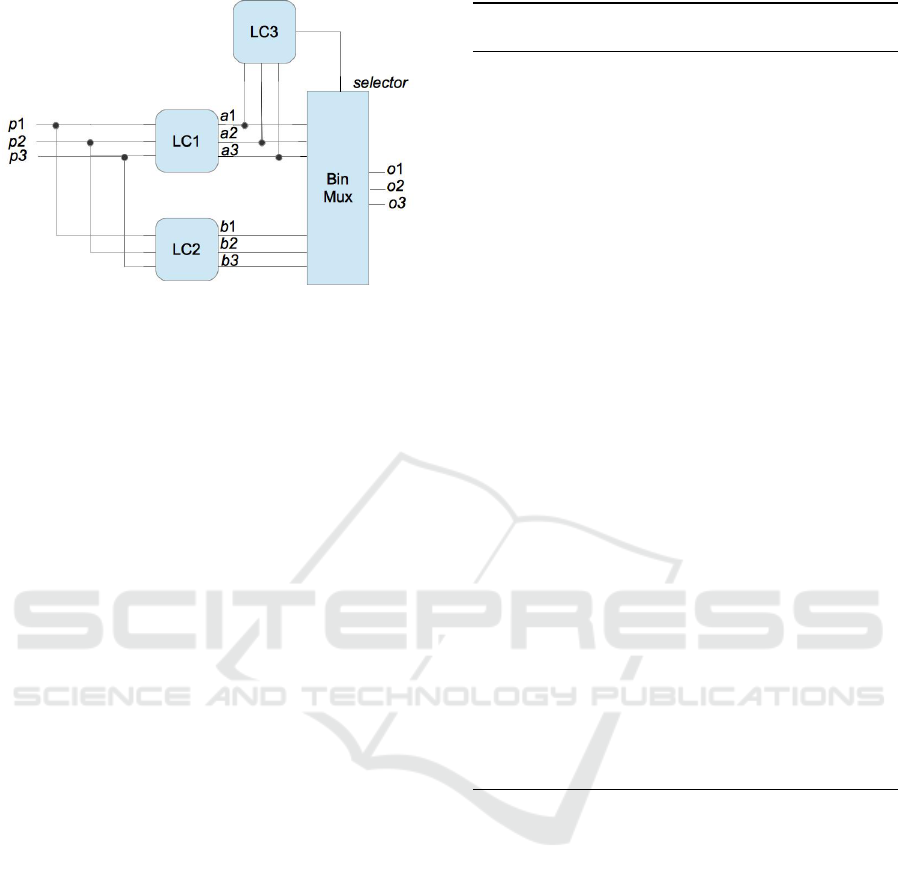
Figure 10: Cascade classification architecture using digital
circuits.
LC2 (the secondary classifier) otherwise.
Note that in Algorithm 3 we assume, for the sake
of simplicity that the primary number of inputs and
outputs of LC1 and LC2 which represent the principal
and secondary classifiers coincide. Further, it is im-
portant to note that the predictions relied on the sec-
ondary classifier can be present at different regions of
the primary classifier. Moreover, our approach can be
easily extended to consider more than two classifiers,
however, these extensions are out of the scope of this
paper, and left for future work. Finally, it is impor-
tant to highlight that creating a composition of devices
can be motivated due to different reasons, other than
achieving a better prediction accuracy. One of exam-
ples in this case is the pre-existence of certain devices
trained for specific data patterns.
6 PRELIMINARY
EXPERIMENTAL RESULTS
To validate our approach, an experimental evaluation
was conducted to compare how fast and scalable can
be a trained complex model as an SVM or an Artifi-
cial Neural Network (ANN) against a digital circuit
constructed from the complex model. As machine
learning implementations vary, as well as the possi-
bilities to implement a logic circuit, different exper-
iments, comparing different apparatus to implement
them were performed. Moreover, the experiments
were conducted using different experimental setups,
to further validate the consistency of our experiments
across various configurations. We showcase those ex-
periments and provide their context in the following
subsections.
Algorithm 3: Algorithm to synthesize a cascade com-
position of logic circuits for prediction.
Input : P, a principal prediction classifier as a
digital circuit; S, a secondary
prediction classifier as a digital
circuit; o, a “virtual class” for the
classifier P to be replaced with the
predictions of the classifier S
Output: C, a cascade logic circuit
1. Set o
0
to the binary representation of o, the
length of o
0
must be equal to the number of
primary outputs of P; using o
0
/1 synthesize V ,
a selector logic circuit
2. Set the number of primary inputs of C to the
number of primary inputs of P; likewise, set
the number of primary outputs of C to the
number of primary outputs of P
3. Connect the primary inputs of C to those of
P and S
4. Derive a binary multiplexer Mx with the two
input signals corresponding to the primary
outputs of P and S respectively, and a single
input for the signal selection; the number of
primary outputs of Mx equals the number of
primary outputs of P
5. Fork the primary outputs of P and connect
them to the primary inputs of V and to the first
input signal of Mx
6. Connect the output of V to the selector input
of Mx
7. Connect the primary outputs of S to the
second input signal of Mx
8. return C where primary outputs of C are
primary outputs of Mx
6.1 Well-known Machine Learning
Implementation Environment vs. a
Simulated Digital Circuit
The motivation behind these experiments is to show-
case that after a machine learning model has been
obtained in well-known mathematical programming
languages, it is comparatively slower than a simula-
tion of its digital circuit equivalent. We chose to com-
pare both approaches as they can be (arguably) con-
sidered to be the slowest of both domains.
The experiments were conducted in a virtual ma-
chine running CentOS 6.9 with 2 Intel(R) Core(TM)
i5-2415M CPU @ 2.30GHz processors, 3GB of
RAM, executed under a VirtualBox Version 5.1.30
r118389 for Mac OS X 10.13.1. Using the exam-
ple data set D from Section 4, the matrix represent-
Scalable Supervised Machine Learning Apparatus for Computationally Constrained Devices
525
ing the area (hypercube in the general case) of inter-
est as B = ((−2, −2),(4,2)), and a trained SVM M
as inputs for Algorithm 2, the obtained circuit was
simulated to predict the unknown pattern (3,−1) (as
shown in Fig. 4).
The ABC tool version 1.01 was used for the sim-
ulation of the pattern (using the sim command). As
the simulation time was so little and ABC does not
provide a precise way to measure the time to simulate
a single pattern, the pattern 101001 (after the shifting
and binary encoding) was simulated 10000 times. The
resulting time for the simulation was 0.02s. There-
fore, on average, each simulation took ∼ 2 ∗ 10
−6
s.
When using GNU Octave version 3.4.3 with LibSVM
version 3.22, the time for predicting the same pattern
was 9.5∗10
−4
s. Therefore, the performance obtained
by using the presented approach was 424 times faster
than the prediction using a complex model (and pro-
gramming language). Nonetheless, thorough experi-
mental investigation is needed to obtain a more pre-
cise value of the speed up.
6.2 Optimized Machine Learning
Libraries / Implementations vs.
Optimized Digital Circuit
Simulation
The motivation behind these experiments is to show
that optimized implementations for machine learning
models are still comparatively slower than a digital
circuit implemented in software. Furthermore, the ex-
periments show that given the nature of a digital cir-
cuit representation, the prediction time does not de-
pend on the complexity of the underlying model (the
model M used to synthesize the circuit).
The experiments were conducted in a computer
with the following features: an Intel(R) Cor(TM) i5-
3210M CPU @ 2.5 GHz, with 8 GB of RAM, running
the operating system GNU/Linux Ubuntu 14.04 (ker-
nel 4.4.0-119-generic).
The Fast Artificial Neural Network li-
brary (FANN) (Nissen, 2003) allows rapid load
and execution of a trained ANN. Furthermore,
when using FANN through a compiled program, the
computation time for predicting the class / value
for a given input vector is short. To ‘optimize’ a
digital circuit simulation, we also provide a compiled
version of a digital circuit. For these experiments,
after obtaining the desired circuit from the original
(FANN provided) neural network, we used the
ABC (Brayton and Mishchenko, 2010) tool to output
the circuit into the Verilog (IEEE, 2017) format. As
the syntax of Verilog highly resembles the C syntax,
we manually translated these simple specifications
into C programs and compiled them
2
. To compare
the approaches, different ANNs were generated, from
a randomly generated data set. Note that the ANNs
were generated with different numbers of hidden
nodes. Each ANN was (i) generated with the FANN
library, and (ii) converted to a compiled program
simulating the corresponding digital circuit. The time
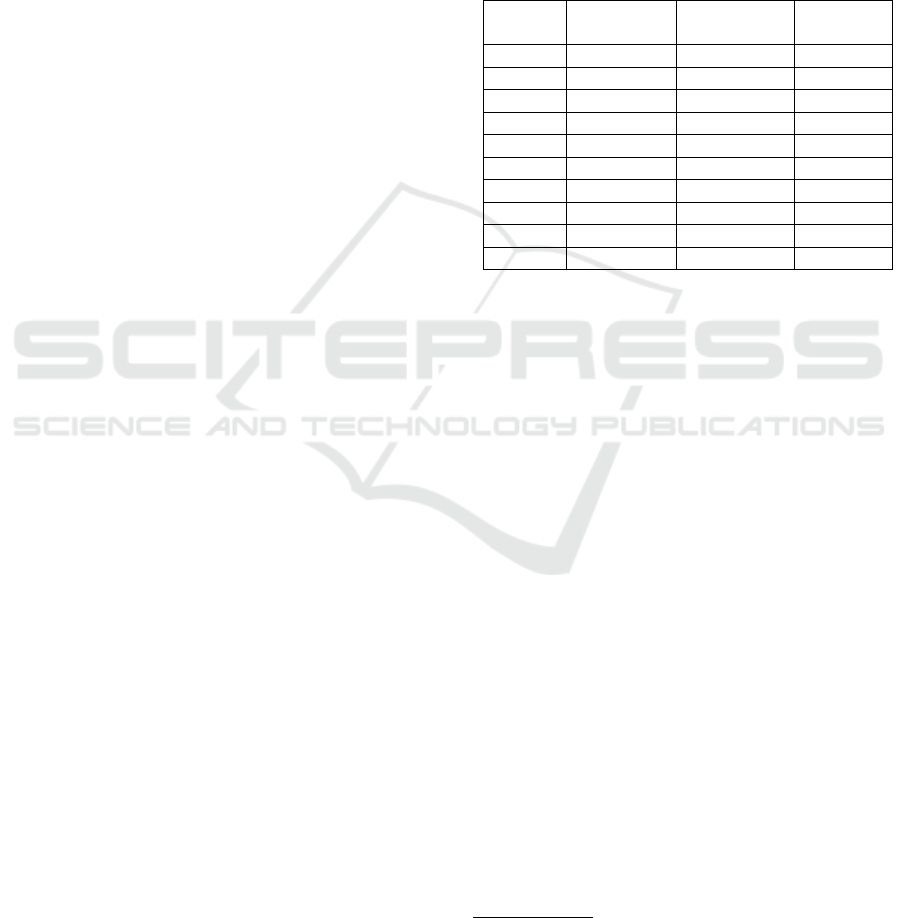
taken to process an input vector is shown in Table 2.
Table 2: Speed-up results for the simulation of optimized
digital circuits.
Hidden
nodes
FANN avg.
time (ms)
Circuit avg.
time (ms)
Circuit
Speed-up
10 1.8917761 1.5471885 1.22
20 2.024755 1.5657246 1.29
30 2.1441107 1.5544505 1.38
40 2.2387445 1.6087804 1.39
50 2.2489767 1.5748608 1.43
60 2.4201026 1.5526805 1.56
70 2.4620724 1.5614781 1.58
80 2.6246381 1.5584424 1.68
90 2.7182679 1.5445390 1.76
100 2.7970853 1.4505086 1.93
It is important to note that due to inherent char-
acteristics of the ANN model different configurations
require longer time; for example, an ANN with more
hidden nodes (neurons) in the network. As deep
learning (Deng et al., 2014) is increasingly gaining
attention, the number of inputs, and hidden layers
in neural networks is expected to be considerably
large thus, significantly affecting the prediction per-
formance. On the other hand, as Table 2 shows the
prediction time for a digital circuit is stable. There-
fore, the speed-up obtained by the digital circuit rep-
resentation consistently increases as the model gets
more complex.
6.3 Field-programmable Gate Array
Implementations
We would like now to showcase a ‘close-to-real’ per-
formance evaluation of what digital circuits used for
classification / prediction can provide. Further, it is
expected that in order to provide a possibility to refine
the prediction model for computationally constrained
devices, FPGA circuits can be employed.
The experiments were preformed by compil-
ing Verilog files obtained from synthesizing digi-
tal circuits from machine learning models as shown
2
To verify the correct translation, the original data set
used to synthesize the ANN was used to compare the digital
circuit program against the trained ANN.
ICSOFT 2018 - 13th International Conference on Software Technologies
526

in Algorithm 2, to the Cyclone V GX FPGA
(5cgxfc5c6f27c7n (Altera Products, 2014)). To mea-
sure the time the FPGA takes to process an input, the
propagation delay was used, i.e., the time a logic sig-
nal takes from the primary input to the primary output
was measured.
As expected, the average propagation time was
largely smaller than any software-based response
time. On average, the propagation time for an FPGA
circuit which implements the behavior of a complex
machine learning model was 11,543 nanoseconds.
The speed-up is therefore, in the order of ten thou-
sand times. Arguably, a digital circuit assembled for
the particular purpose might have better performance,
however, as FPGA circuits seem to be better suited for
the prediction task in computationally constrained de-
vices, we focused on them. Moreover, the real time to
communicate with the prediction circuit was not taken
into account in the current experiments and further
work implementing the approach on real constrained
devices is necessary to accurately evaluate the time
speed-up. In order to validate the cascade composi-
tion approach, a digital circuit was synthesized and
programmed into an FPGA circuit. As expected, the
circuit possesses the prediction accuracy of the ma-
chine learning cascade composition and the inexpen-
sive features of a digital circuit.
6.4 Discussion
We note that the complexity issues for the proposed
approach (Section 4) impose a number of limitations
on its applicability. In fact, the main complexity ‘is
hidden’ in Steps 2 of both Algorithms 1 and 2. Indeed,
the number of iterations to build an LUT for the logic
circuit derivation dramatically affects the scalability
of the proposed approach. When the number of rows
m in the data set depends in a polynomial way on the
number of significant trust parameters, the complex-
ity of the derivation of the cascade logic circuit can be
also approximated with a proper polynom. However,
on the other hand, the bigger is m the more precise
is the prediction. Performing the preliminary experi-
ments allowed us to draw some conclusions about this
precision / scalability trade-off.
Evidently, in this case, the size of the hyper-cube
is a limitation of the approach. However, computing
the expected values in the hyper-cube until a given
time or space limit is a common heuristic. The ap-
proach is applicable for smaller hyper-cubes of inter-
est as in the motivating case study presented in Sec-
tion 3. We conclude that a mobile application running
in a constrained device should use at most few units
in MB for heap and stack sizes, and for disc utiliza-
tion; it should also use few units of CPU percentage;
likewise, few units of micro-amperes for the energy
consumption. For that reason, the number of patterns
labeled as trustworthy is expected to be small, and the
obtained digital circuit to predict the trustworthiness
of a mobile application is expected to have a relatively
small number of inputs. Therefore, even if the num-
ber of rows m grows exponentially w.r.t. the number
of trust parameters, the power of the exponent can still
be limited by a feasible constant. Nonetheless, we
note that further experimental evaluation is necessary
to carefully estimate when the approach is applicable
and / or preferable.
7 CONCLUSION
In this paper, we presented an approach to synthesize
digital circuits that reproduce the behavior of complex
machine learning algorithms. Such digital devices
can be used as scalable apparatus for complex classifi-
cation / prediction in computationally constrained de-
vices. We note that the proposed approach is generic
and can be applied for implementing any (semi-) su-
pervised machine learning technique as the corre-
sponding hardware device. In this paper, for exam-
ple, we focused on neural networks and support vec-
tor machines utilized for this purpose. We show-
cased later on how cascade compositions for machine
learning-based devices can be achieved through using
a digital multiplexer. Such compositions have high
accuracy prediction level, and at the same time they
are not resource consuming (computationally inex-
pensive). Preliminary experimental results show the
applicability and scalability of the proposed approach.
We also notice that when using an appropriate
multiplexer, the proposed approach can be applied for
a cascade composition of two machine learning / self-
adaptive models (Kushik and Yevtushenko, 2015) if
subsets of the data set for effective prediction are
known for each circuit. However, a circuit for such
multiplexer is known to be much simpler than those
for digital circuits and can be not taken into account
when evaluating the processing time and consumed
resources.
As mentioned above, experimental results are
rather preliminary and we therefore plan to perform
large-scale experiments in real environments to fur-
ther validate the applicability and limitations of the
proposed approach. On the other hand, we would like
to try different (machine-learning-based) digital cir-
cuit compositions to try to estimate the prediction ac-
curacy for each of such compositions. Furthermore,
an interesting perspective is to study the use of digital
Scalable Supervised Machine Learning Apparatus for Computationally Constrained Devices
527

circuits for unsupervised and reinforcement learning.
ACKNOWLEDGEMENTS
The authors would like to thank Prof. Roland Jiang,
and his group at National Taiwan University for the
organized seminars and fruitful discussions that par-
tially inspired this research. The results in this work
were partially funded by the Russian Science Foun-
dation (RSF), project # 16-49-03012.
REFERENCES
Altera Products, A. C. (2014). Altera mature devices.
https://www.altera.com/products/fpga/overview.html.
Bormann, C., Ersue, M., and Keranen, A. (2014). IETF
RFC 7228.
Boser, B. E., Guyon, I. M., and Vapnik, V. N. (1992). A
training algorithm for optimal margin classifiers. In
Proceedings of the Fifth Annual Workshop on Compu-
tational Learning Theory, COLT ’92, pages 144–152,
New York, NY, USA. ACM.
Brayton, R. and Mishchenko, A. (2010). Abc: An aca-
demic industrial-strength verification tool. In Touili,
T., Cook, B., and Jackson, P., editors, Computer
Aided Verification, pages 24–40, Berlin, Heidelberg.
Springer Berlin Heidelberg.
Brown, S. D., Francis, R. J., Rose, J., and Vranesic, Z. G.
(2012). Field-programmable gate arrays, volume 180.
Springer Science & Business Media.
Christopher, M. B. (2016). PATTERN RECOGNITION
AND MACHINE LEARNING. Springer-Verlag New
York.
Deng, L., Yu, D., et al. (2014). Deep learning: methods
and applications. Foundations and Trends® in Signal
Processing, 7(3–4):197–387.
Google, I. (2013). Android 4.4 compatibility definition.
https://source.android.com/compatibility/4.4/android-
4.4-cdd.pdf. Last accessed: 2018-04-14.
IEEE (2017). Ieee approved draft standard for
systemverilog–unified hardware design, specification,
and verification language. IEEE P1800/D4a, July
2017, pages 1–1317.
Intel, C. (2018). Intel movidius neural compute stick
v2.04.00. https://developer.movidius.com. Last ac-
cessed: 2018-05-05.
Kushik, N. and Yevtushenko, N. (2015). Scalable qoe pre-
diction for service composition. In Proceedings of
the 2nd International Workshop on Emerging Soft-
ware as a Service and Analytics - Volume 1: ESaaSA,
(CLOSER 2015), pages 16–26. INSTICC, SciTePress.
Kushik, N., Yevtushenko, N., and Evtushenko, T. (2016).
Novel machine learning technique for predicting
teaching strategy effectiveness. International Journal
of Information Management.
L
´
opez, J., Kushik, N., and Yevtushenko, N. (2017). Proac-
tive trust assessment of systems as services. In
Proceedings of the 12th International Conference on
Evaluation of Novel Approaches to Software Engi-
neering - Volume 1: ENASE,, pages 271–276. IN-
STICC, SciTePress.
L
´
opez, J. and Maag, S. (2015). Towards a generic trust
management framework using a machine-learning-
based trust model. In 2015 IEEE Trustcom/Big-
DataSE/ISPA, volume 1, pages 1343–1348.
Nissen, S. (2003). Implementation of a fast artificial neu-
ral network library (fann). Report, Department of
Computer Science University of Copenhagen (DIKU),
31:29.
Tarando, S. R., Fetita, C. I., and Brillet, P. (2017). Cas-
cade of convolutional neural networks for lung texture
classification: overcoming ontological overlapping.
In Medical Imaging 2017: Computer-Aided Diagno-
sis, Orlando, Florida, United States, 11-16 February
2017, page 1013407.
ICSOFT 2018 - 13th International Conference on Software Technologies
528
