
The Role of Robot Design in Decoding Error-related Information from
EEG Signals of a Human Observer
Joos Behncke
1,2
, Robin T. Schirrmeister
2
, Wolfram Burgard
1
and Tonio Ball
2
1
Department of Computer Science, Albert-Ludwigs-University Freiburg, Germany
2
Translational Neurotechnology Lab, University Medical Center Freiburg, Germany
Keywords:
EEG, Error Processing, Deep Learning, Convolutional Neural Networks, Robot Design, Mirror Neuron
System, BCI.
Abstract:
For utilization of robotic assistive devices in everyday life, means for detection and processing of erroneous
robot actions are a focal aspect in the development of collaborative systems, especially when controlled via
brain signals. Though, the variety of possible scenarios and the diversity of used robotic systems pose a chal-
lenge for error decoding from recordings of brain signals such as via EEG. For example, it is unclear whether
humanoid appearances of robotic assistants have an influence on the performance. In this paper, we designed
a study in which two different robots executed the same task both in an erroneous and a correct manner. We
find error-related EEG signals of human observers indicating that the performance of the error decoding was
independent of robot design. However, we can show that it was possible to identify which robot performed the
instructed task by means of the EEG signals. In this case, deep convolutional neural networks (deep ConvNets)
could reach significantly higher accuracies than both regularized Linear Discriminanat Analysis (rLDA) and
filter bank common spatial patterns (FB-CSP) combined with rLDA. Our findings indicate that decoding in-
formation about robot action success from the EEG, particularly when using deep neural networks, may be an
applicable approach for a broad range of robot designs.
1 INTRODUCTION
Error-related brain activity has the potential to sup-
port the management and implementation of BCI sy-
stems in various scenarios. Error detection systems
have been embedded to improve real life tasks, e.g.,
to detect and correct erroneous actions performed by
an assistive robot online, using primary and secon-
dary error-related potentials (ErrPs) (Salazar-Gomez
et al., 2017). Other approaches benefit from ErrPs
to extract incorrect maneuvers in a real-world driving
task (Zhang et al., 2015) or use error-related nega-
tivity (ERN) to correct erroneous actions in object
moving tasks (Parra et al., 2003). In addition, error-
related brain signals have been utilized to teach neu-
roprosthetics appropriate behaviour in situations with
changing complexity (Iturrate et al., 2015).
Recently we could show that deep Convolutional
Neural Networks (deep ConvNets) significantly im-
proved the decoding of robot errors from the EEG
of a human observer (Behncke et al., 2018). Howe-
ver, the role of robot design in the decodability of
error-related information in this scenario has not yet
been investigated, although robots come in a broad
range of different designs. Beside specifying proper-
ties like mobility or autonomy, a robot can be clas-
sified regarding its grade of being humanoid. Especi-
ally when collaborative interactions with humans take
place, this characteristic may have an influence on
the human’s perception of the robots behaviour. In a
comparison between a human and a robotic agent per-
forming several movement tasks, an activation of the
human mirror neuron system (Rizzolatti et al., 1996)
could be shown (Gazzola et al., 2007).
To investigate the impact of robot design, we de-
signed a study where two robots performed exactly
the same task, either correctly or not. The two robots
differed in their physical appearance and basic design.
We analyzed the classification performances of the
error-related EEG signals separately for the different
robot types. Furthermore, we investigated whether a
distinction between the two robot types could be made
based on the EEG recordings. For classification, we
employed a deep ConvNet, and we compared deco-
ding performances with those of two more conven-
tional methods, namely a regularized Linear Discri-
Behncke, J., Schirrmeister, R., Burgard, W. and Ball, T.
The Role of Robot Design in Decoding Error-related Information from EEG Signals of a Human Observer.
DOI: 10.5220/0006934900610066
In Proceedings of the 6th International Congress on Neurotechnology, Electronics and Informatics (NEUROTECHNIX 2018), pages 61-66
ISBN: 978-989-758-326-1
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All r ights reserved
61

minant Analysis (rLDA), see (Friedman, 1989), and
filter bank common spatial patterns (FB-CSP) combi-
ned with an rLDA classifier.
2 SYSTEM AND EXPERIMENTAL
DESIGN
In this study, participants were instructed to observe
two robots performing a naturalistic task either in a
correct or an erroneous manner. A humanoid (NAO
(TM), Aldebaran Robotics, Paris, France) and non-
humanoid robot (referred to as NoHu) were program-
med to approach, grab, and lift a ball from the ground.
They either succeeded in lifting or failed, letting the
ball drop again. The visual stimuli consisted of short
video clips, which were presented to the participants
in a randomized order. Each trial consisted of a fixa-
tion period followed by the video playback and com-
pleted by the final attention task. Figure 1 shows the
trials structure and the experimental paradigm sche-
matically. A total of at least 800 trials per participant
were recorded, split into sessions of 40 trials.
Figure 1: Timing structures of the experiment (> 800 trials
per participant). Each trial consisted of a 2 s fixation period,
video stimulus of 7s and an attention control task.
12 healthy participants (22-31 years old, 6 fe-
male) participated in our experiments, giving their in-
formed consent for the study, which was approved
by the local ethics committee. While observing the
performed tasks, the participants were seated inside
a dimly lit EEG recording chamber, being equipped
with an active electro-magnetic shielding to ensure a
high signal quality. The EEG cap consisted of 128
gel-filled electrodes positioned according to the five-
percent electrode layout.
3 METHODS
3.1 Pre-processing and Decoding
The recorded EEG signals were re-referenced to a
common average reference (CAR) and resampled to
250Hz. An electrode-wise exponential moving stan-
dardization was applied to normalize the data by ex-
ponential moving means and variances. Then, accor-
ding to stimulus onset and predefined decoding inter-
vals the data were cut into trials and used as classi-
fication features. The deep ConvNets were designed
using the open-source deep learning toolbox brain-
decode for raw time-domain EEG, based on the mo-
del Deep4Net. In the first of the four convolutional-
max-pooling blocks a temporal and a spatial convo-
lution over all channels is done stepwise. Followed
by three conventional convolution blocks, the out-
put is finally delivered by a dense softmax classifi-
cation layer. More detailed information about the un-
derlying architecture can be found in (Schirrmeister
et al., 2017). The data were split into two sets, 80 %
were used for training while the remaining 20% ser-
ved as a test set.
For the rLDA the pre-processing was similar ex-
cept the fact that no standardization was implemen-
ted, resulting in higher accuracies than with standar-
dization. The rLDA algorithm comprised a shrinkage
parameter estimation, based on the LedoitWolf esti-
mator (Ledoit and Wolf, 2004) as suggested in (Blan-
kertz et al., 2010)
In the FB-CSP implementation, the data were
high-pass filtered using a Butterworth filter (order
4, cut-off frequency 0.5 Hz) and automatically clea-
ned before cut into trials. The resulting trial struc-
ture was then band-pass filtered in 35 non-overlaying
frequency bands between 0.5 Hz and 144Hz, having
a bandwidth of 2Hz for bands lower than 30Hz
and a bandwidth of 6 Hz for higher frequency bands
(Buzs
´
aki and Draguhn, 2004). For further details on
feature selection and classifier design, see (Ang et al.,
2012; Blankertz et al., 2008).
3.2 Decoding Intervals
Relative to the video onset, two decoding intervals
were selected. A long decoding interval of 0 − 7 s co-
vered the full length of the video, while a late interval
of 4 − 7 s was selected since it was covering the actual
process of grasping and lifting the ball. For both in-
tervals decoding performances were calculated using
all of the methods presented in 3.1.
3.3 Statistical Procedures
For estimation of significance of the decoding results
per participant a random permutation test was applied
(Pitman, 1937). Each of the n = 10
6
sets of randomly
shuffled labels, reflecting the real total number of tri-
als per class, was compared to the genuine labels to
NEUROTECHNIX 2018 - 6th International Congress on Neurotechnology, Electronics and Informatics
62

create a reasonable distribution of potential classifica-
tion results. The generated distribution was then used
to determine the significance per participant and de-
coding interval. In Figure 2 group significances were
estimated by means of the single trials and using a
sign test (Hollander et al., 2013).
4 ERROR DECODING
Firstly, we investigated the influence of robot design
on the performance in an error-decoding scenario.
Therefore, the trials were sorted by robot type and
the decoding analysis of erroneous vs. correct tri-
als was performed separately on the two data sets.
In this case, only the deep ConvNet implementation
was used for error detection. Figure 2 shows the out-
come of this analysis, showing the distribution of the
accuracies for both robot conditions for all partici-
pants. Even though the decoding of trials presenting
the NoHu robot executing the task showed a broader
range, there was no significant (p = 1) difference be-
tween the two conditions. The ConvNets achieved
median accuracies of (64.82 ± 6.75) % for the NAO
condition and (64.02 ± 8.72)% for the NoHu condi-
tion, yielding almost the same performance taking the
errors into account.
Figure 2: Boxplots of accuracies for error decoding for the
two robot types.
5 DISTINCTION BETWEEN
ROBOT TYPES
Three different decoding methods were used for clas-
sification, ConvNets, rLDA and FB-CSP+rLDA. For
each participant decoding accuracies were determined
for both decoding intervals (see 3.2) which were de-
fined according to the video onset. An overview of
mean decoding accuracies is given in Table 1. The
results indicate that a distinction between the two
kinds of robots was decodable with all of the applied
techniques. Furthermore, for both decoding intervals
the deep ConvNet architecture performed consistently
and significantly better (sign test, p < 0.01).
Table 1: Mean Accuracies for Different Decoding Intervals.
0 - 7s 4 - 7s
ConvNet (78.31 ± 8.09)% (73.80 ± 7.52)%
rLDA (68.29 ± 8.00)% (64.71 ± 7.36)%
FB-CSP (55.71 ± 4.54)% (56.80 ± 3.92)%
Figure 3A shows the pairwise comparison of per-
formances for the different classifiers, including the
results of the analysis gained with both of the deco-
ding intervals. Significance is indicated by blue color
while the red squares represent the mean accuracies,
the diagonal indicates equal performance. For each
single participant, the decoding accuracies gained by
the deep ConvNet implementation significantly ex-
ceeded those of the other methods, i.e., compared to
rLDA and FB-CSP, the ConvNet performed signifi-
cantly better on the group level.
To gain a measure of the relationship between the
decoding results of the different decoding techniques,
we calculated the pairwise linear correlation between
decoding accuracies over subjects. Figure 3B shows
the correlation for all pairs; the dotted line represents
the result of the linear regression. The results indicate
a highly significant linear relationship between deep
ConvNet and rLDA performances, but also for both of
the other combinations a significant (p < 0.05) cor-
relation can be found.
6 VISUALIZATION
The visualization used in this section was applied as
suggested in (Schirrmeister et al., 2017), visualizing
EEG features that the deep ConvNet learned from the
data when used to distinguish between the different
robot designs. To this aim, the correlation between
changes of the predictions made by the ConvNet and
perturbation changes in time domain voltage amplitu-
des were calculated. By adding Gaussian noise, trai-
ning trials were randomly perturbed. After that, the
perturbed signal and the unperturbed signal were both
fed into the deep ConvNet. The two outputs were ex-
tracted before the softmax activation, and their diffe-
rence was correlated with the perturbation itself. The
results can be visualized in a channel-resolved man-
ner. The decision to use time domain signals as an
The Role of Robot Design in Decoding Error-related Information from EEG Signals of a Human Observer
63
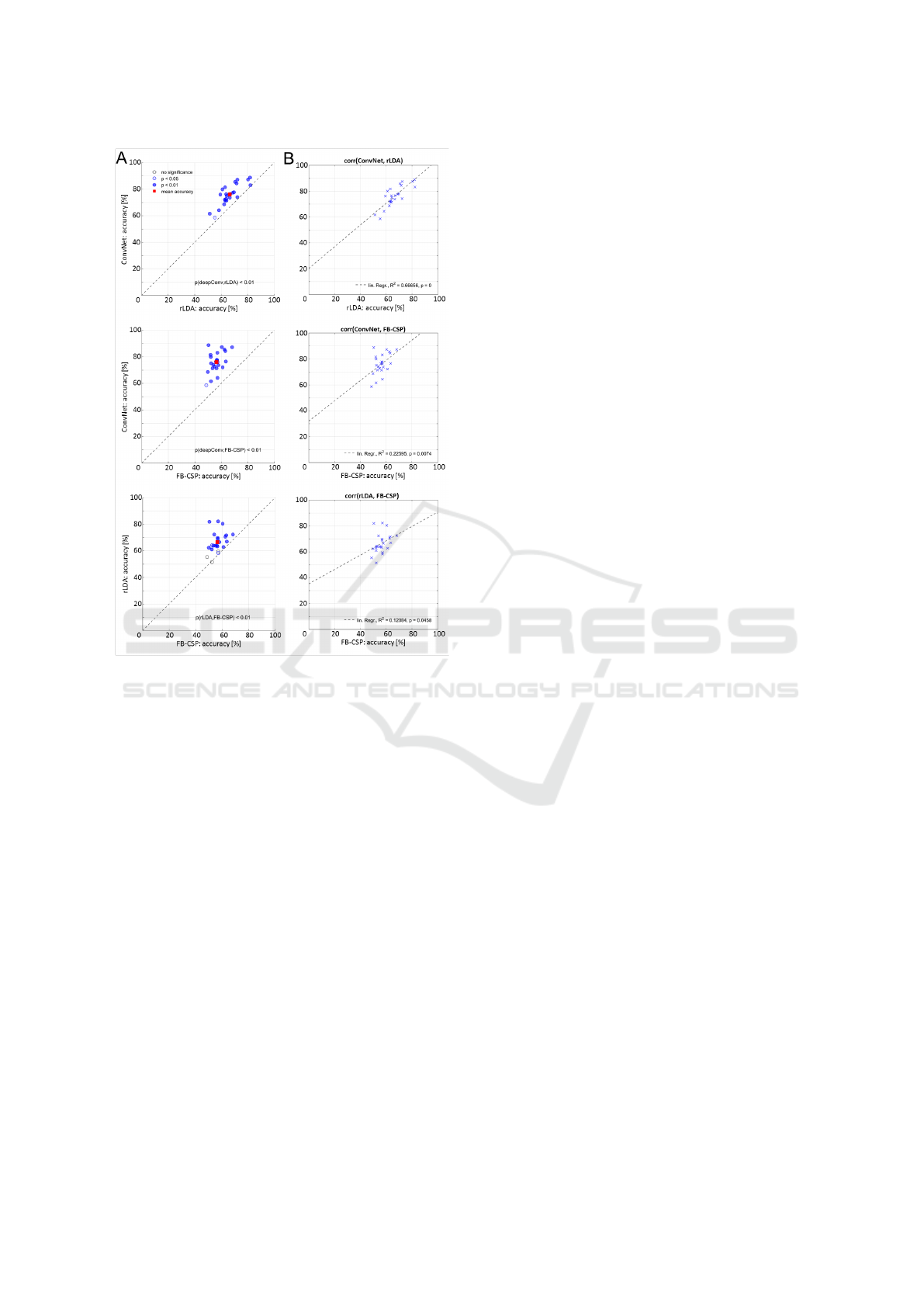
Figure 3: (A) Pairwise comparison of decoding accuracies
investigated with three different methods. (B) Pairwise li-
near regression of the participants performances.
input for the perturbations instead of spectral ampli-
tudes was made according to the fact of lower deco-
ding performances of the CSP algorithm, which re-
lies on spectral features. This circumstances suggest
that spectral information was likely not that promi-
nent in the underlying decoding problem. The cor-
relations shall indicate at which moment changes in
certain channels might contribute to the classifiers de-
cision causally.
In Figure 4 the (participant- and iteration-)
averaged time-resolved input-perturbation network-
prediction correlation maps for voltage features of
the robot type decoding are shown. The maps are
depicted from 2 − 6 s, whereby each map illustrates
the correlation of a 0.2s time bin. For each bin, the
two maps (NAO and NoHu) are shown together with
their corresponding video frame. As expected, pairs
of maps for the two different conditions exhibit op-
posed correlations. Figure 4 is divided into a section
were the robots approach the ball (top) and a section
were the robots try to lift the ball (bottom). At the
bottom of each section, the time-resolved normalized
L1 distance ∆
norm
of sequential pairs of video frames
for both conditions is illustrated.
The perturbation maps in Figure 4 exhibit in-
creasing, prominent correlation patterns for signals
around 3.2 s and 5.0 s according to video onset. At the
first time point, the effects show spatially more wide-
spread correlations with a remarkable, centered peak
in frontal areas accompanied by an occipital symme-
tric effect. The later time window around 5.0s shows
similar but less symmetric patterns in occipital regi-
ons, and a more pronounced frontal peak. The occi-
pital effects for both time points might indicate diffe-
rent cerebral processings of the visual characteristics
in the robots execution of the programmed task.
As a first step, to examine visual features which
might have led to differences in brain signals for the
two robot conditions, we calculated the time-resolved
normalized L1 distance ∆
norm
. The corresponding
curve in Figure 4 indicates a rather small difference
between sequential frames and a steady difference be-
tween the two conditions, as the curve varies only
little but with consistently high values. Furthermore,
with this method no obvious correlation between the
time course of visual changes and informative featu-
res extracted by the perturbation analysis can be sug-
gested.
7 CONCLUSION & OUTLOOK
The potential of error detection for practical BCI ap-
plications has recently led to several studies in EEG
research, e.g. (Salazar-Gomez et al., 2017; Zhang
et al., 2015; Parra et al., 2003; Iturrate et al., 2015).
However, to our knowledge, aspects of robot design
has not been part of investigations on error-related
brain signals so far. In this study, we examined this
aspect and show that at least the two different robot
designs used in our current study did not have any sig-
nificant negative impact on the performance of error
decoding, indicating that in principle error decoding
is applicable to various robot types.
The distinction between robot types based on the
participants brain-signals yielded in mean accura-
cies of (78.31 ± 8.09) % for the ConvNet, (68.29 ±
8.00)% for the rLDA and (55.71 ± 4.54) % for FB-
CSP implementation when decoding on the whole
time-window covered by the video stimulus. Hence,
the robot type indeed could be classified on the basis
of the EEG data. Moreover, our ConvNet implemen-
tation could reach systematically better results than
the two other methods. Notably, the ConvNet was not
specifically adjusted to the problem, but used ”out-of-
the-box” as it was available in the used open-source
NEUROTECHNIX 2018 - 6th International Congress on Neurotechnology, Electronics and Informatics
64
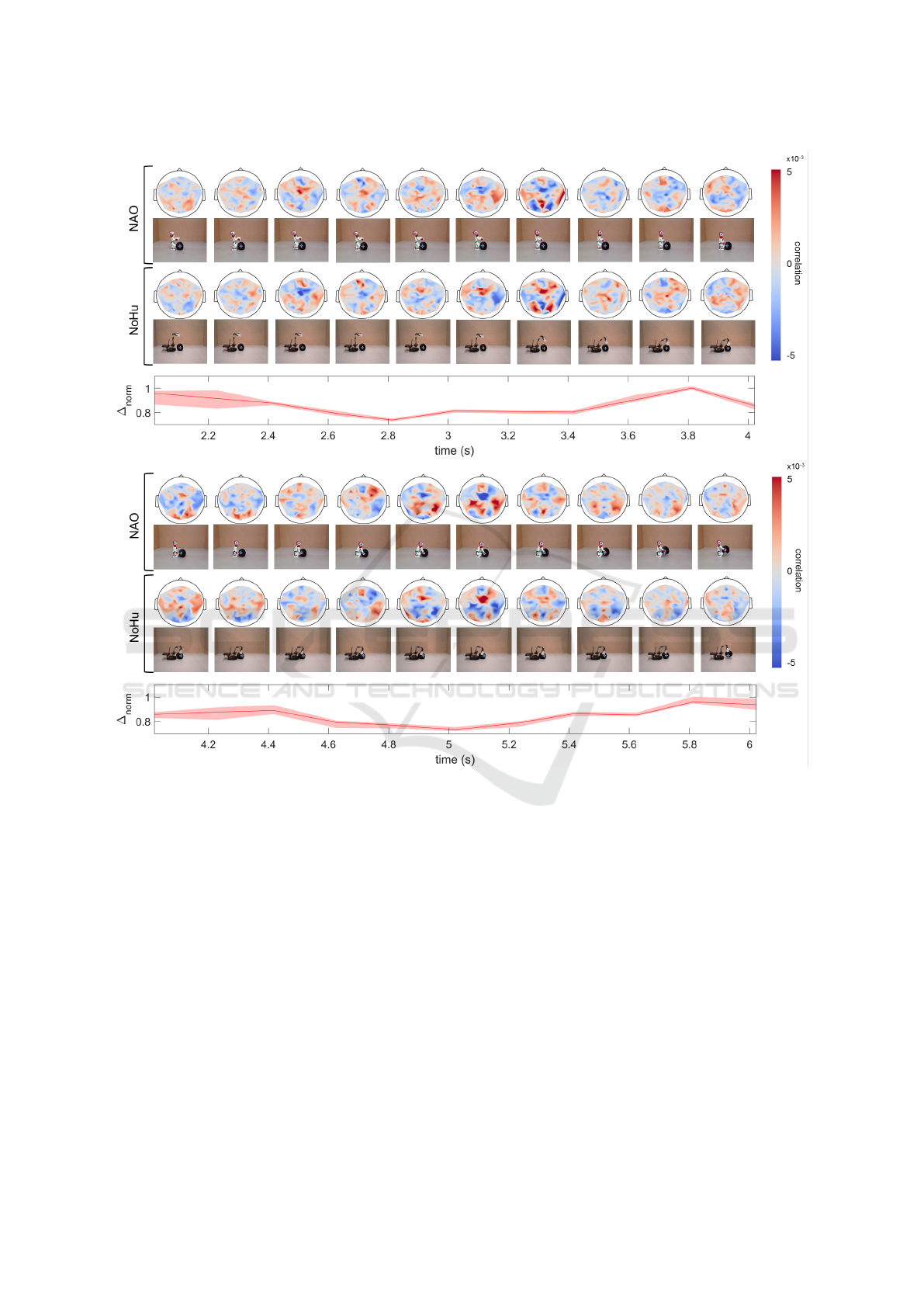
Figure 4: Time-resolved voltage feature input-perturbation network-prediction correlation maps for robot type decoding,
averaged over participants and 30 iterations, and corresponding video frames (top rows). Time-resolved normalized L1
distance of sequential pairs of video frames for both conditions (bottom row).
implementation. Deep ConvNets have already ente-
red the field of EEG research and proven their appli-
cability (Tang et al., 2017), but not yet for distinction
of robot types. Overall, the accuracies reached here
are however still far from the requirements for practi-
cal application. E.g. intracranial signals or further
improved non-invasive methods will be necessary to
reach better performance.
The pairwise comparison of the participants deco-
ding results for the different methods showed a signi-
ficant linear correlation for all cases. Particularly the
behaviour of ConvNet und rLDA accuracies were ap-
parent: the net appears to act more ”rLDA-like” for
the given problem, in line with the assumption that
time-domain features were mainly informative.
For the visualization, the time-domain EEG signal
changes were correlated with decoding results deter-
mined after a Gaussian perturbation. Based on the
correlation maps as shown in Figure 4 it appears that
the ConvNet learns time-domain information to dis-
tinguish between classes, as specific time windows
reveal more pronounced effects than others. Thus, a
prominent focus of the distribution of informative sig-
nals lies on occipital brain regions. This might reflect
the difference in the processing of the visual input for
the two robot types. Visualizations also show a dis-
tinct medio-frontal peak. This effect appeared around
the same time when the robot approached to the tar-
get and grasped it. It is possible that in this cases
the mirror neuron system (MNS) might get activated
(Hari et al., 1998; Rizzolatti et al., 1996; Rizzolatti
and Craighero, 2004; Mukamel et al., 2010), which
The Role of Robot Design in Decoding Error-related Information from EEG Signals of a Human Observer
65

involves widespread frontal and parietal regions. Ac-
cording to this, the different robot types could have
lead to a differential activation of this system.
ACKNOWLEDGEMENTS
This work was supported by DFG grant EXC1086
BrainLinks-BrainTools and Baden-Wrttemberg Stif-
tung grant BMI-Bot. Furthermore, the authors would
like to thank Dominik Welke and Marina Hader for
their support in creating and processing the data sets,
but especially the subjects for their conscientious par-
ticipation.
REFERENCES
Ang, K. K., Chin, Z. Y., Wang, C., Guan, C., and Zhang, H.
(2012). Filter bank common spatial pattern algorithm
on bci competition iv datasets 2a and 2b. Frontiers in
neuroscience, 6:39.
Behncke, J., Schirrmeister, R. T., Burgard, W., and Ball, T.
(2018). The signature of robot action success in eeg
signals of a human observer: Decoding and visuali-
zation using deep convolutional neural networks. In
Brain-Computer Interface (BCI), 2018 6th Internatio-
nal Conference on, pages 1–6. IEEE.
Blankertz, B., Tangermann, M., Vidaurre, C., Fazli, S., San-
nelli, C., Haufe, S., Maeder, C., Ramsey, L. E., Sturm,
I., Curio, G., et al. (2010). The berlin brain–computer
interface: non-medical uses of bci technology. Fron-
tiers in neuroscience, 4:198.
Blankertz, B., Tomioka, R., Lemm, S., Kawanabe, M., and
Muller, K.-R. (2008). Optimizing spatial filters for ro-
bust eeg single-trial analysis. IEEE Signal processing
magazine, 25(1):41–56.
Buzs
´
aki, G. and Draguhn, A. (2004). Neuronal oscillations
in cortical networks. science, 304(5679):1926–1929.
Friedman, J. H. (1989). Regularized discriminant analy-
sis. Journal of the American statistical association,
84(405):165–175.
Gazzola, V., Rizzolatti, G., Wicker, B., and Keysers, C.
(2007). The anthropomorphic brain: the mirror neu-
ron system responds to human and robotic actions.
Neuroimage, 35(4):1674–1684.
Hari, R., Forss, N., Avikainen, S., Kirveskari, E., Salenius,
S., and Rizzolatti, G. (1998). Activation of human pri-
mary motor cortex during action observation: a neuro-
magnetic study. Proceedings of the National Academy
of Sciences, 95(25):15061–15065.
Hollander, M., Wolfe, D. A., and Chicken, E. (2013). Non-
parametric statistical methods, volume 751. John Wi-
ley & Sons.
Iturrate, I., Chavarriaga, R., Montesano, L., Minguez, J.,
and Mill
´
an, J. d. R. (2015). Teaching brain-machine
interfaces as an alternative paradigm to neuroprosthe-
tics control. Scientific reports, 5:13893.
Ledoit, O. and Wolf, M. (2004). A well-conditioned estima-
tor for large-dimensional covariance matrices. Journal
of multivariate analysis, 88(2):365–411.
Mukamel, R., Ekstrom, A. D., Kaplan, J., Iacoboni, M., and
Fried, I. (2010). Single-neuron responses in humans
during execution and observation of actions. Current
biology, 20(8):750–756.
Parra, L. C., Spence, C. D., Gerson, A. D., and Sajda, P.
(2003). Response error correction-a demonstration
of improved human-machine performance using real-
time eeg monitoring. IEEE transactions on neural sy-
stems and rehabilitation engineering, 11(2):173–177.
Pitman, E. J. (1937). Significance tests which may be app-
lied to samples from any populations. Supplement to
the Journal of the Royal Statistical Society, 4(1):119–
130.
Rizzolatti, G. and Craighero, L. (2004). The mirror-neuron
system. Annu. Rev. Neurosci., 27:169–192.
Rizzolatti, G., Fadiga, L., Gallese, V., and Fogassi, L.
(1996). Premotor cortex and the recognition of mo-
tor actions. Cognitive brain research, 3(2):131–141.
Salazar-Gomez, A. F., DelPreto, J., Gil, S., Guenther, F. H.,
and Rus, D. (2017). Correcting robot mistakes in real
time using eeg signals. In Robotics and Automation
(ICRA), 2017 IEEE International Conference on, pa-
ges 6570–6577. IEEE.
Schirrmeister, R. T., Springenberg, J. T., Fiederer, L. D. J.,
Glasstetter, M., Eggensperger, K., Tangermann, M.,
Hutter, F., Burgard, W., and Ball, T. (2017). Deep
learning with convolutional neural networks for eeg
decoding and visualization. Human brain mapping,
38(11):5391–5420.
Tang, Z., Li, C., and Sun, S. (2017). Single-trial eeg clas-
sification of motor imagery using deep convolutio-
nal neural networks. Optik-International Journal for
Light and Electron Optics, 130:11–18.
Zhang, H., Chavarriaga, R., Khaliliardali, Z., Gheorghe,
L., Iturrate, I., and d R Mill
´
an, J. (2015). Eeg-
based decoding of error-related brain activity in a real-
world driving task. Journal of neural engineering,
12(6):066028.
NEUROTECHNIX 2018 - 6th International Congress on Neurotechnology, Electronics and Informatics
66
