
Self-adaptive Synchronous Localization and Mapping using Runtime
Feature Models
Christopher Werner, Sebastian Werner, Ren
´
e Sch
¨
one, Sebastian G
¨
otz and Uwe Aßmann
Software Technology Group, Technische Universit
¨
at Dresden, Dresden, Germany
Keywords:
Self-adaptive Systems, Feature Modeling, Robotics, Slam.
Abstract:
Mobile autonomous robotic systems need to operate in unknown areas. For this, a plethora of simultaneous
localization and mapping (SLAM) approaches has been proposed over the last decades. Although many of
these existing approaches have been successfully applied even in real-world productive scenarios, they are
typically designed for specific contexts (e.g., in- vs. outdoor, crowded vs. free areas, etc.). Thus, for different
contexts, different SLAM algorithms should be used. In this paper, we propose a feature-based classification
of SLAM algorithms and a reconfiguration approach to switch between existing SLAM implementations at
runtime. By this, mobile robots are enabled to always use the most efficient implementation for their current
contexts.
1 INTRODUCTION
Simultaneous localization and mapping (SLAM) is
a standard problem in robotic software engineering,
which covers the ability of a mobile robot to orient
itself in an unknown environment. The robot has to
perform two tasks simultaneously: it has to discover
its environment (mapping) and has to estimate its own
position in this environment (localization). For this,
various sensors like ultrasonic, cameras, or LIDAR
(light detection and ranging) are used.
Over the last decades, vast amounts of SLAM al-
gorithms have been proposed in the literature, each of
which can be considered as a specialized solution for
a certain application context or certain operation con-
ditions. For example, different algorithms have been
proposed for in- and outdoor scenarios, for static and
dynamic environments, for crowded and sparse areas,
and for surface and underwater scenarios.
Typically, each new SLAM algorithm is develo-
ped from scratch without reusing parts of existing al-
gorithms. In consequence, no common framework
for SLAM algorithms, which allows to (de-)compose
SLAM algorithms, exists yet. Moreover, as SLAM is
used by mobile robots, the operation conditions of the
robot can change at runtime. For example, by leaving
the building, the operation conditions switch from in-
to outdoor.
Thus, a mobile robot should be able to switch its
SLAM algorithm at runtime whenever its operation
conditions change. For this, a unifying framework,
which explicitly covers the commonalities and diffe-
rences between existing SLAM algorithms is requi-
red.
As a result, in this paper, we present such a uni-
fying framework for SLAM algorithms represented
as a feature model based on a commonality and vari-
ability analysis of over 30 existing implementations.
Using this framework, we answer two research ques-
tions:
RQ1) Is it possible to systematically reuse parts of
existing SLAM algorithms?
RQ2) Is it possible to dynamically exchange parts of
existing SLAM algorithms during execution?
Additionally, we present a runtime reconfigu-
ration approach, which allows switching between
SLAM algorithms based on this feature model.
We show the general applicability of our approach
by a case study implemented within the GeneralRobot
framework (developed at HTW Dresden).
The remainder of this paper is structured as fol-
lows. In the next section, we introduce a running ex-
ample, which will be used throughout the paper for
illustrative purposes. Next, in Section 3, the unifying
framework is discussed. The dynamic reconfiguration
approach is captured in Section 4. The evaluation of
our approach is presented in Section 5. We demarcate
our approach from related work in Section 6. Finally,
in Section 7, we conclude the paper and give pointers
for future work.
Werner, C., Werner, S., Schöne, R., Götz, S. and Aßmann, U.
Self-adaptive Synchronous Localization and Mapping using Runtime Feature Models.
DOI: 10.5220/0006945504090418
In Proceedings of the 7th International Conference on Data Science, Technology and Applications (DATA 2018), pages 409-418
ISBN: 978-989-758-318-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
409

(a) KLD in wrong position with possible positions.
(b) KLD with wrong selected position.
(c) Random KLD with correct position.
Figure 1: Grid Map of changing particle component.
2 RUNNING EXAMPLE
As our running example a driving robot is considered,
which can be used in small and large rooms as well as
in corridors and outside. For an efficient and accurate
calculation, it is necessary to adapt the SLAM algo-
rithm for area changes. Such adjustments can also
be made on the basis of a low battery level, in which
case an energy efficient algorithm must be selected.
Furthermore, requirements for a SLAM algorithm can
vary, e.g., special areas are only traversed and in ot-
her areas localization must take place with millimeter
precision. For all such situations there are speciali-
zed SLAM implementations and adaptations, which
currently have to be determined manually and imple-
mented in a fixed algorithm.
Our example shows the adjustment of a compo-
nent of the particle filter and the corresponding parti-
cle number at runtime for a Core SLAM (Steux and
Hamzaoui, 2010), that uses particle based algorithms
for localization in a grid map with a 2D laser scan-
ner. In Figure 1, the process of localization with ap-
proaching a target is visualized for a grid map. At
the beginning in Figure 1(a), the particle filter KLD
(Kullback-Leibler distance) with a few particles is
used to save energy. The robot is actually at the
bottom left at the beginning. However, the KLD al-
gorithm estimates its position wrongly at the bottom
right. This is an immense deviation, which is due to
the homogeneous map and the used algorithm. In ad-
dition, errors in the robot sensors quickly lead to devi-
ations from the exact position. Throughout the exam-
ple, the target position is selected at the top right, with
a route to be driven drawn as a line from the localized
point to the target. Particles are shown in green, with
most of them already gathered around the estimated
position. In the second step in Figure 1(b), all parti-
cles are gathered around the localized position, thus
the robot is no longer able to find its correct position.
To remedy this state, the particle component has to
be replaced at runtime without affecting other compo-
nents or the complete SLAM implementation, which
would lead to a considerable overhead. In Figure 1(c),
this is done by using the Random KLD particle fil-
ter, which randomly distributes particles in space and
then selects the best one. This algorithm is more
computation-intensive but ensures that the localiza-
tion takes up the correct position of the robot again
and that it can still reach its goal.
At this point, it would be possible to switch back
to the KLD particle filter after a certain time to save
energy and to switch to the Random KLD particle fil-
ter if the position probabilities are too low to perform
a repositioning. If this approach is no longer appli-
cable due to a low battery level, an adjustment of the
maximum number of particles to be reviewed could
achieve further energy savings. This example shows
the applicability of a product family of SLAM algo-
rithms discussed in the next section and the need of
feedback loops for runtime modification.
3 A UNIFYING FRAMEWORK
FOR SLAM ALGORITHMS
In the scope of our investigations, we examined 42
SLAM algorithms, comprising both grid- and feature-
based methods, listed in Table 1 along with their es-
sential properties. However, only grid-based SLAM
methods are incorporated in the feature model in Fi-
gure 2. The integration of feature-based methods will
be investigated in the future.
To structure Table 1, all SLAM algorithms were
examined for their different properties, for which each
algorithm is implemented. Setting is the basic pro-
EDDY 2018 - Special Session on Adaptive Data Management meets Self-Adaptive Systems
410

Table 1: Features of SLAM algorithms.
Algorithm Map Sensors Feature
Detector
Setting Language
6D SLAM (Quigley et al., 2009) octo map 2D-laser,
D-camera
none outdoor C++
Bearing-only SLAM (Kwok and
Dissanayake, 2003)
feature map camera external indoor n/a
CEKF-SLAM (Wang et al., 2012) feature map camera external indoor,
outdoor
Matlab
Core-SLAM or Tiny-SLAM (Steux and
Hamzaoui, 2010)
grid map laser none indoor C++
D-SLAM (Wang et al., 2007) information
matrix
laser external indoor Mathlab
Dense Visual SLAM (Kerl et al., 2013) pose-sensor
graph
RGBD-
camera
external indoor C++
DP-SLAM (Eliazar and Parr, 2003) distributed
particle grid
map
laser none indoor C++
EKF-SLAM (Thrun et al., 2006) feature map laser,
camera
external indoor,
outdoor
any
EKFmono SLAM (Grasa et al., 2011) feature map camera external outdoor Matlab
ESEIF-SLAM (Walter et al., 2007) graph map,
information
matrix
any external indoor,
outdoor,
underwater
n/a
Fast Incremental Square Root
Information Smoothing (Kaess et al.,
2007)
feature map,
pose graph
any external outdoor n/a
FastSLAM 1.0 (Thrun et al., 2006) feature map,
grid map
laser,
camera
external,
none
indoor,
outdoor
any
FastSLAM 2.0 (Thrun et al., 2006) feature map,
grid map
laser,
camera
external,
none
indoor,
outdoor
any
FootSLAM (Bruno and Robertson, 2011) feature map pedometer none walkable n/a
G
2
o-SLAM (K
¨
ummerle et al., 2011) graph map any external indoor,
outdoor
C++
Gmapping (Quigley et al., 2009) grid map laser none indoor C++
Graph-SLAM (Thrun et al., 2006) graph map laser,
camera
external indoor,
outdoor
any
Grid-SLAM (Hahnel et al., 2003) grid map laser none indoor C++
Hector SLAM (Kohlbrecher et al., 2014) grid map RGBD-
camera
optional,
none
indoor C++
HOG-Man SLAM (Grisetti et al., 2010) graph map any external indoor,
outdoor
C++
ICP-SLAM (Tiar et al., 2013) grid map,
pose-sensor
graph
laser none indoor C++
iSAM SLAM (Kaess et al., 2008) feature map,
pose graph
laser external outdoor C++,
OCaml
iSAM2 SLAM (Kaess et al., 2011) feature map,
graph map
laser external indoor,
outdoor
n/a
Java FastSLAM (Oursland, 2014) feature map any external outdoor Java
Loopy SLAM (Ranganathan et al., 2007) feature map,
pose graph
any external outdoor n/a
Linear SLAM (Zhao et al., 2013) feature map,
pose graph
any external indoor,
outdoor
Matlab,
C++
Self-adaptive Synchronous Localization and Mapping using Runtime Feature Models
411

Table 1: Features of SLAM algorithms. (continued).
Algorithm Map Sensors Feature
Detector
Setting Language
Octo SLAM (Fossel et al., 2013) octo map 2D-laser none indoor,
outdoor
C++
Online 6D SLAM (Endres et al., 2012) octo map D-camera none indoor C++
PlaceSLAM (Bruno and Robertson,
2011)
feature map human
input
none walkable n/a
Range-Only SLAM (Blanco et al., 2008) feature map,
grid map
laser none indoor,
outdoor,
underwater
C++
RatSLAM (Ball et al., 2013) topological
map
camera external indoor,
outdoor
C++
RBPF-SLAM (Schroeter and Gross,
2008)
grid map laser none indoor,
outdoor
C++
RT-SLAM (Roussillon et al., 2011) feature map camera external indoor C++
SEIF-SLAM (Thrun et al., 2006) graph map,
information
matrix
laser,
camera
external indoor,
outdoor
any
SeqSLAM (Milford and Wyeth, 2012) image graph camera external outdoor Matlab
SLAM 6D (N
¨
uchter, 2008) octo map D-camera none indoor C++
SLAM++ (Salas-Moreno et al., 2013) feature map,
sparse matrix
RGBD-
camera
external indoor C++
Square Root SLAM (Kaess and Dellaert,
2009)
feature map,
pose graph
camera external indoor n/a
SPA-SLAM (Konolige et al., 2010) sparse matrix laser none indoor C++
Trajectory-oriented EKF
SLAM (G
´
erossier et al., 2009)
pose-sensor
graph
radar
sensor
none outdoor,
underwater
Matlab,
C++
Vector Field SLAM (Gutmann et al.,
2012)
feature map,
sparse matrix
infrared,
wifi
none indoor n/a
WiSLAM (Bruno and Robertson, 2011) feature map wifi, pe-
dometer
none walkable n/a
perty for which a SLAM process has been designed.
A distinction can be made between indoor, outdoor
or under water, and in the air. However, the diffe-
rence between individual rooms, long corridors, or a
combination of both is also important, as this already
limits the use of different SLAM procedures. For the
acquisition of environmental data, various sensors are
needed, ranging from simple RGB cameras over la-
ser scanners up to RGBD cameras (RGB with depth
information). The storage options of sensor data are
described in the maps column and comprises various
kinds of maps including grid maps, feature maps and
particle-based maps, as show in Table 1.
Grid-based maps are a two-dimensional represen-
tation, where a map is divided into square fields each
with the status free, occupied, or unknown. An octo
map adds the third dimension to a grid map retai-
ning all other properties. On the contrary, feature-
based maps contain identified features and their spa-
cial coordinates to derive the position of the robot ba-
sed on those features and their position. For particle-
based maps, particles are assumed to be the estima-
ted positions of the robot, which are randomly derived
from the estimated movements to correct hardware er-
rors. Therefore, each computation for a particle can
work on its own map or use a shared map. Further-
more, graph maps offer the option to store distances
between robot positions and features, as well as bet-
ween both, different features and different robot po-
sitions. Further, visibilities and paths are recorded.
All other map types are special cases of the presen-
ted base types. Those base types differ w.r.t. me-
mory requirements, dimension, and stored informa-
tion. The feature detector column indicates whether
features are required to be detected by an external al-
gorithm. As a last criterion, we list the programming
languages used for the sample implementations, if ap-
plicable.
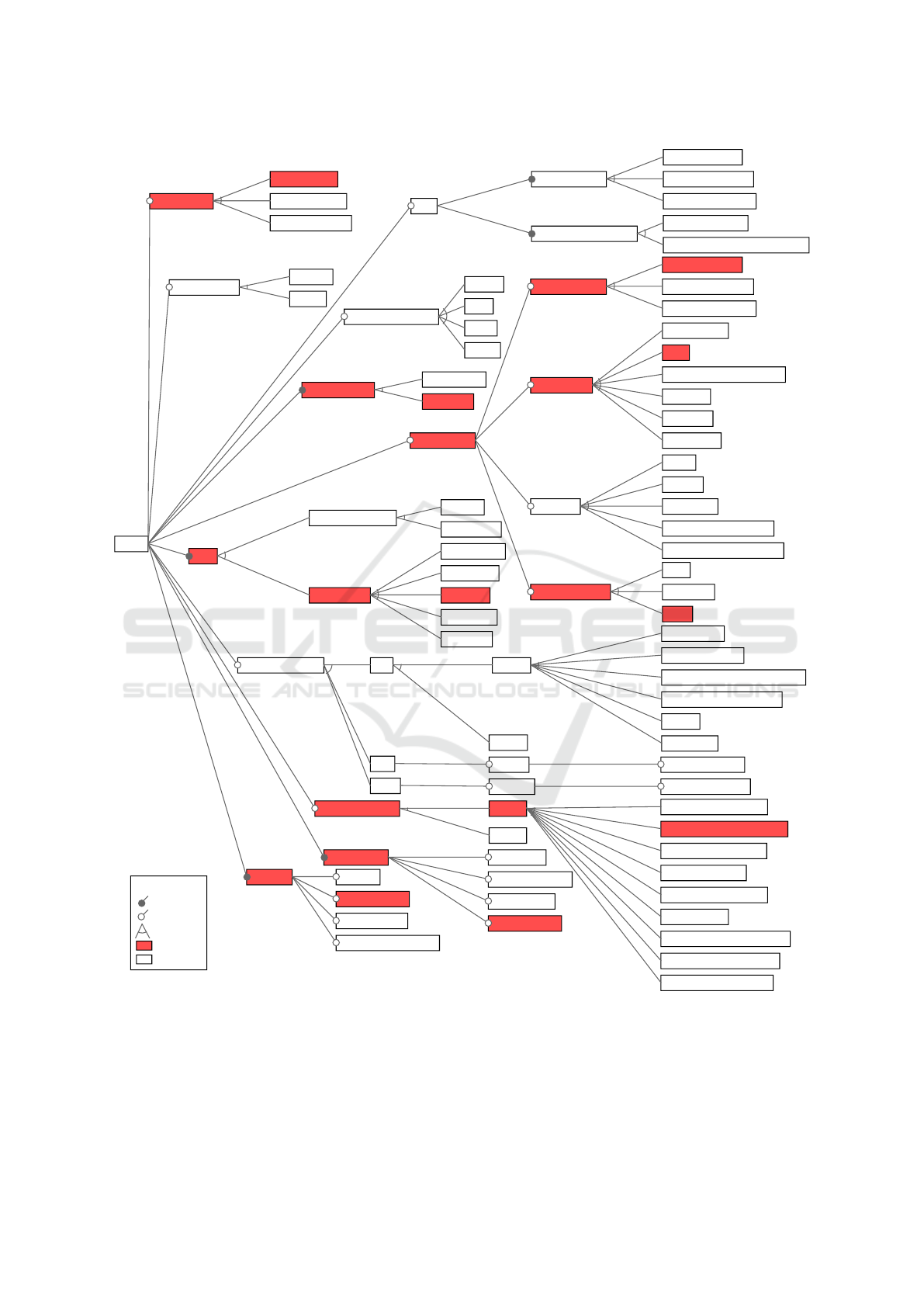
In Figure 2, you can see the feature model for grid-
based SLAM methods, which is divided into optional
and mandatory elements and can be used to construct
new SLAM algorithms. The Core SLAM (Steux and
Hamzaoui, 2010) is highlighted in red and represents
a valid feature configuration. Core SLAM is a further
EDDY 2018 - Special Session on Adaptive Data Management meets Self-Adaptive Systems
412

development of the Fast SLAM (Thrun et al., 2006)
algorithm and aims for mapping individual rooms. It
is a particle-based process and uses one map for all
particles, whereby several particles are determined for
one position and the likeliest one is used to update the
map. Thereby, the position of the robot is found. As
already shown in Section 2, this method can comple-
tely lose its orientation in homogeneous rooms. Core
SLAM is an example for the adaptation to changing
hardware components, because feature recognition is
not needed anymore contrary to Fast SLAM, but only
2D laser scanner data.
For reasons of clarity, the feature model does not
show dependencies between existing features. For ex-
ample, the corresponding motion data of the robot
is required for updating motion information. In ad-
dition, feature recognition algorithms require camera
images to work correctly. This example shows the de-
pendencies between sensors, their data formats, and
the corresponding algorithms. The described depen-
dencies are considered within our implementation.
Each SLAM algorithm requires Sensors (e.g., La-
ser Scanners, Cameras, Depth Image Cameras, or
RGBD-Cameras) to identify the environment. These
generate Sensor Data, which is stored in different
map formats. The identified map formats include
Simple Maps such as graph structures, raster images,
or point clouds, as well as DP maps and Particle Lists,
both of which are special Particle Filter Maps. The
Working Mode is critical to the scope of the process,
as Full-SLAM covers both localization and mapping,
whereas Localization does only the former. However,
if an inaccurate SLAM algorithm is used, the SLAM
can distort the maps and render them unusable.
Path Planning does not fit directly into the con-
figuration of a SLAM procedure but is required in
most cases and is therefore integrated in the feature
model with the A-Star and Dijkstra algorithms. All
other available features are optional and assemble the
SLAM algorithm.
The feature Motion Data distinguishes between
different motion models of a robot, where Velocity
Data defines a forward motion with a circular mo-
tion, and Odometry Data a sequential execution of
rotary and motion movements. The feature EKF (Ex-
tended Kalman Filter) is used to draw conclusions
about the real state caused by faulty measurement and
movement data, based on information about the resi-
lience of the hardware. Algorithms for Feature Gene-
ration are only used for camera recordings and search
for landmarks in them.
A large part of the feature model includes particle-
based features, which are divided into Sample Motion,
Resampling, Clusterer, and Particle Number. All
mentioned features except cluster algorithms have al-
ready been presented in Section 2. Cluster algorithms
are used to close loops within mapping environments.
These algorithms create a closed map and remove in-
correct overlaps of information.
Algorithms for direct determination of the robot
position based on motion and sensor data are summa-
rized in the feature Position Estimate including speci-
fications of ICP, IDC, and IMRP for 2D and 3D maps.
The last branch of the model includes probabi-
lity models, which determine a probability value for
the current position based on the robot position and
sensor data. In particular, map information and la-
ser lines of the scanner are included for this purpose.
The current feature model contains only raster-based
SLAM methods. However, it offers the possibility to
configure and create SLAM procedures based on self-
selected properties.
4 RUNTIME
RECONFIGURATION OF SLAM
ALGORITHMS
This section introduces a concept for reconfiguration
of a SLAM algorithm at runtime, using the feature
model described in Section 3 as a basis for creating
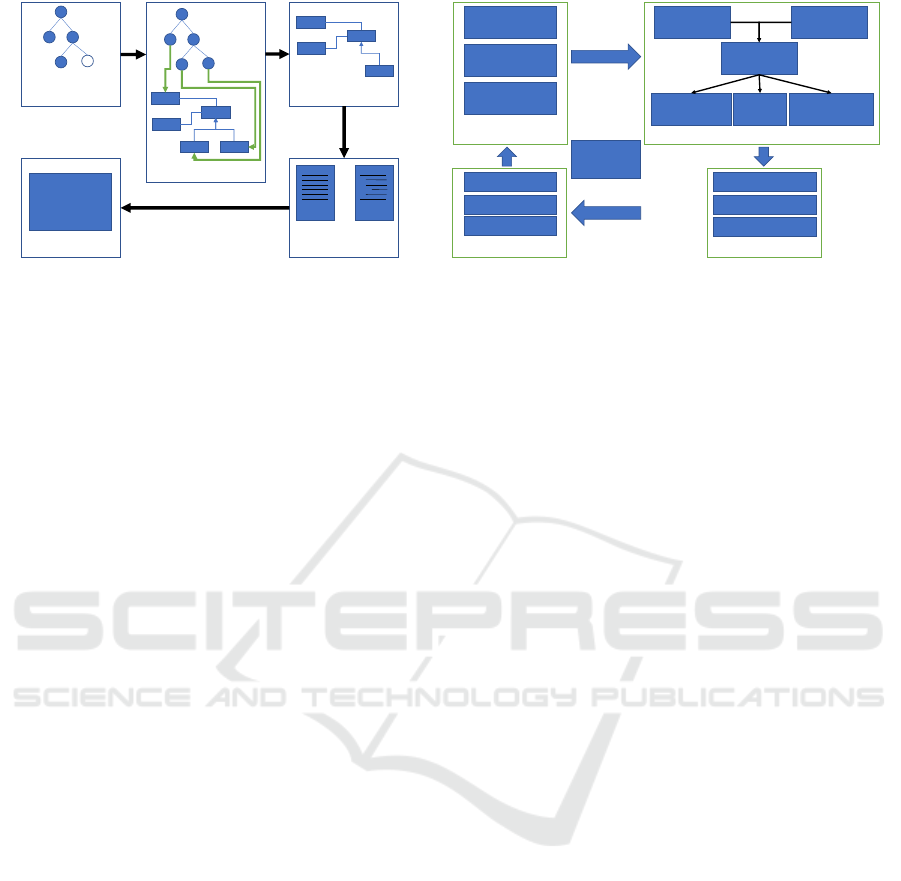
new variants. Figure 3(a) shows the basic process of
static variability modeling, which is taken as the basic
building block for our approach, wherein a new exe-
cutable is created from a variant of the feature tree. To
do this, a solution model must exist for a feature mo-
del that maps all features to elements in this model.
In the mapping phase, a modified model is created for
the selected variant, from which a configuration and
code is generated. This generated code can be compi-
led and started as an executable program and replaces
the current running model. The process is sufficient
for static reconfiguration but does not include any in-
formation from the running model and creates over-
head as the complete program is exited and restarted.
This also means that the collected data must be saved
and reloaded. To improve efficiency, we extend the
process of static variability modeling by integrating
the MAPE-K feedback loop. MAPE-K contains the
phases Monitor, Analyze, Plan, and Execute. In ad-
dition, the MAPE-K loop contains a knowledge base
that collects data from the running system. With it, the
feedback loop permanently observes the underlying
system and reacts on changes.
Figure 3(b) shows the complete concept for run-
time reconfiguration of SLAM algorithms. In the mo-
nitor phase, the sensor and robot data are recorded and
Self-adaptive Synchronous Localization and Mapping using Runtime Feature Models
413
Overlapping Histogram
ICP Levenberg Marquardt
KLD
Histogram
SIFT
Trimmed ICP
RGB Image
2D Laser Scan
IDC
Simple Map
History
Full-SLAM
Model-free Sample
Measurement Update
Odometric Update
Likelihood Field II
Sum of Gaussian
Feature generation
Likelihood Consensus OWA
Sensors Camera
Particle filter
Particle List
Interpolating ICP
Hough
Likelihood Consensus
Octo Map
IMRP-2D
Feature Map
Neighborhood Histogram
Graph Map
SURF
Velocity Sample
Low
Grid Map
Motion Update
Stratified
Working Mode
Model-free Update
Map
Sensor Data
Motion Data
IMRP
Basic
Particle Number
Likelihood Simple Hybrid
Likelihood Cells Difference
Laser Scanner
Interpolating IMRP
Pointcloud
ICP IKF
Likelihood RayTracing
Residual
LM-2D
ICP-3D
Particle Filter Map
Dijkstra
Odometric Sample
Interpolating IDC
Model-free Data
Moderate
Random KLD
IDC-2D
Likelihood Field Thrun
ICP Classic
Localization
Velocity Update
High
EKF
Improved proposal distribution
SLAM
Likelihood Table Hybrid
Likelihood MI
Likelihood Model
Harris
Position extimate
Sample Motion
Odometry Data
ICP-2D
LM-3D
RGBD-Camera
Point-Line correspondence ICP
Depth Image
A-Star
Systematic
Path Planning
Clusterer
ICP
Greyscale Image
Depth Image Camera
Resampling
Velocity Data
Multinomial/Low Variance
DP-Map
Legend:
Mandatory
Optional
Alternative
Selected
Concrete
Figure 2: The Feature Model with Core SLAM as selected feature configuration.
passed on to the analysis phase. Therein, the data is
analyzed using various parameters and used to check
the efficiency of the currently running SLAM confi-
guration. If the analysis finds optimization possibi-
lities, a new feature variant is generated. Otherwise,
the running program is not changed. In the case of
optimization, the new feature configuration is map-
ped to a new model and transferred to the planning
phase. This compares the current model with the new
model to determine changes. Based on the identified
EDDY 2018 - Special Session on Adaptive Data Management meets Self-Adaptive Systems
414
Generalized Code
and Configuration
Feature Tree
Variant
Text Code
+
Program
Target Model
Mapping
Executable
(a) Static variablility.
Knowledge
Base
Mapping
Plan
New
Model
Running
Model
Compare
Operations
Preprocessing
System
Changes
Postprocessing
generate
Execute
1. Preprocessing
2. System Changes
3. Postprocessing
Monitor
Analyze
Robot State
Sensor Data
…
1. Monitor Data
2. Analyse
3. Generate
Feature Variant
(b) MAPE-K with dynamic runtime reconfiguration.
Figure 3: Concept for Reconfiguration.
modifications, preprocessing steps, system changes,
and postprocessing steps are determined. As a basic
rule, the earlier a change occurs in the feature model,
the more process steps are required for the adapta-
tion. Adapting a particle based on a position estimate
SLAM requires complete parts of the program to be
exchanged, which leads to interruptions in the pro-
cessing. However, switching between different res-
ampling algorithms can be performed within one step
without creating an interruption. In the static varia-
bility modeling, a new executable would have to be
created and started for each new configuration. As
soon as the planning phase has determined the process
sequence, it is transferred to the execute phase. This
phase manages the interruptions for the robot and exe-
cutes the reconfiguration steps in the predefined order,
e.g., in case multiple algorithms have to be instanti-
ated. Therefore, the feedback loop can modify the
running system based on the monitored runtime data
collected continuously. In the next section, the imple-
mentation of this concept is shown, with the focus on
the plan and execute phase, since the SLAM proce-
dures were examined only for their features. Neither
accuracy nor efficiency were considered yet, thus no
analysis algorithm can be derived.
5 EVALUATION BY
IMPLEMENTATION
In this section, the steps to get from one instance of
the feature model to a working, adaptable implemen-
tation are detailed.
We base our work on the component-based frame-
work GeneralRobot developed at the HTW Dresden.
Its main concepts are processors and data containers.
Processors are responsible for a certain computation
and running constantly triggered periodically or upon
new data is available. On the other hand, data contai-
ners only hold data, are read by processors and inform
them about changes. To configure the used processors
and data containers, GeneralRobot uses a simple con-
figuration file. We use a properties model describing
key-value pairs to define used components and their
configuration parameter values.
Getting from a feature configuration to such a pro-
perties model needs a mapping. We use the FeatureM-
apper (Heidenreich et al., 2008) to map each feature
to a set of key-value-pairs. It uses the 150% appro-
ach (Weißleder and Lackner, 2013), i.e., all compo-
nents in the target model are already there and will
be removed based on the feature selection. Using the
FeatureMapper, we can automatically generate a pro-
perties model from a given feature configuration. The
feature configuration is depicted in Figure 4.
To use this properties model, we made slight mo-
difications to the framework GeneralRobot, e.g., add
methods to update used components or configura-
tion values, or to modify processors to change sub-
processors in a thread safe way. Generating a new
properties model after a change in the feature model,
the framework compares the current properties with
the new ones and derive reconfiguration steps. Those
steps can be small, like changing a configuration para-
meter, or bigger adaptations such as exchanging a set
of processors. All changes will be reordered to avoid
unnecessary work, e.g., changing a parameter before
replacing the component using this parameter.
Coming back to the example described in
Section 2, in the following we describe what happens
to change from KLD to Random KLD. The base fea-
ture configuration is depicted in Figure 2 where KLD
is selected. From this, a properties model was crea-
ted and loaded by GeneralRobot. To start reconfigu-
ration, the feature KLD deselected and Random KLD
is selected. Then, the FeatureMapper is run again to
generate a new properties model, which now includes
a property using the class RandomKldSampling for
resampling. This model is picked up inside our mo-
Self-adaptive Synchronous Localization and Mapping using Runtime Feature Models
415
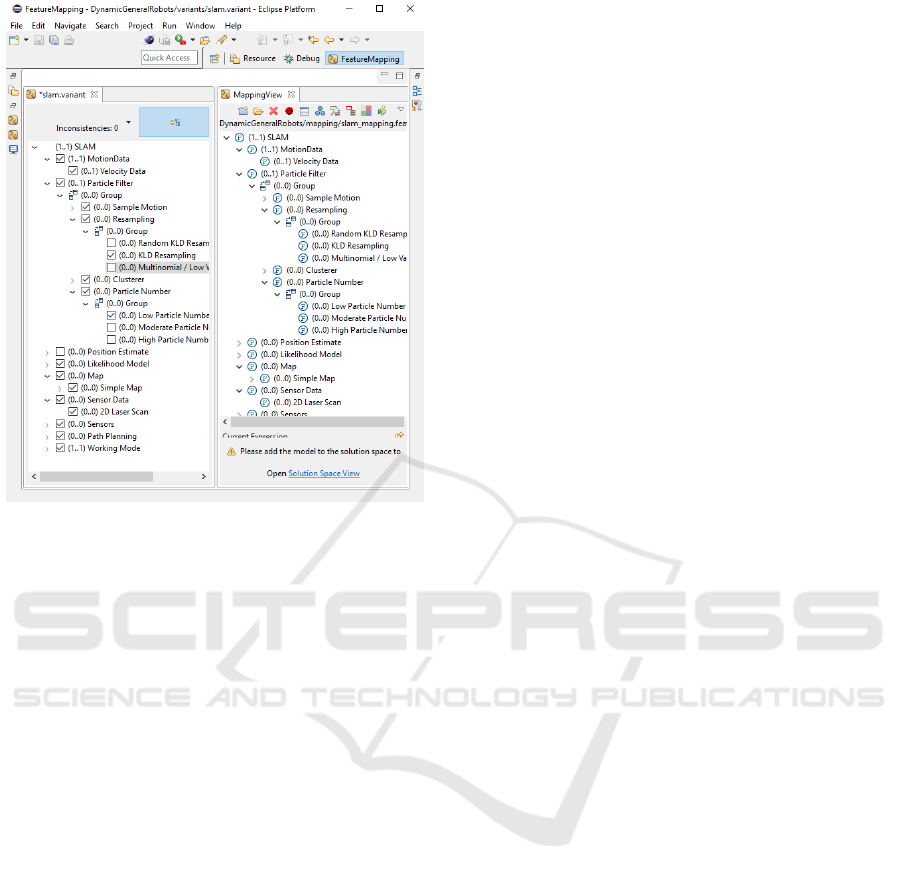
Figure 4: Screenshot of the FeatureMapper view.
dified version of GeneralRobot, where it is compared
to the current properties model to derive the needed
reconfiguration steps. In this case, the object of type
KldSampling is disabled, i.e., it is stopped and con-
nections to data containers are removed. Afterwards
a new object of type RandomKldSampling is crea-
ted and wired to the same containers. The important
point here is, that because of the separation of con-
cerns followed by GeneralRobot, only the processors
need to be replaced and the data containers are left un-
touched and intermediate data is preserved. The des-
cribed process eliminates the need for shut down and
restart of the running system altogether. Thus, it in-
creases the adaptability and performance of the over-
all system and with it the reuse of common SLAM
functionality.
6 RELATED WORK
In the research area for SLAM, individual algorithms
are usually created, which are optimized for a certain
type of environment or in a partial area of the algo-
rithm, but not frameworks, which combine the ad-
vantages of different SLAM methods. In this section,
we want to present four robot frameworks, which of-
fer several SLAM methods and prescribe fixed inter-
faces for the communication of the subcomponents.
Section 5, our extension to the GeneralRobot Fra-
mework from the HTW Dresden is already presen-
ted, using our feature model to transfer from the sta-
tic basic programming into a dynamic framework for
SLAM algorithms.
The Robot Operating System (ROS) (Quigley
et al., 2009) platform is an open source project, which
deals especially with robot environments. It provi-
des a complete framework with interfaces and imple-
mentations for sensors, robot controllers, localization,
mapping, and control. Two SLAM methods, GMap-
ping (Grisettiyz et al., 2005) and HectorSLAM (Kohl-
brecher et al., 2014) are implemented in ROS. These
are integrated into the ROS platform as complete mo-
dules and not as partial algorithms and can therefore
only be exchanged as a whole. This makes it difficult
to modify and adapt a SLAM algorithm. For ROS,
however, the SLAM algorithms only represent an ex-
tension of the platform. In addition, it is possible to
integrate frameworks such as OpenCV for processing
sensor data such as camera images or laser scanner
data but this does not facilitate the development and
integration of further SLAM methods.
The OpenSLAM (Stachniss et al., 2007) platform
collects a variety of SLAM algorithms and implemen-
tations and makes them available to researchers and
users. Users can publish their SLAM implementati-
ons on an internet platform with a small documen-
tation of the system requirements.These must be sta-
ble but are not linked in any framework or software
product. Due to the large selection of SLAM met-
hods, the platform offers a good opportunity to ana-
lyze the individual algorithms and the structure of the
SLAMs. However, the granularity of the implemen-
tation of SLAM implementations plays a major role
here. This ranges from complete implementation in
one method containing the complete communication
and function algorithms to splitting into several met-
hods. The results are multiple implementations of dif-
ferent algorithms. Therefore, OpenSLAM provides a
good basis for extending the existing software.
The Mobile Robot Programming Toolkit (Claraco,
2008) platform goes one step further than OpenS-
LAM (Stachniss et al., 2007) and offers a complete
framework programmed in C/C++. The framework
prescribes data exchange formats and data structu-
res to which developers must orient themselves wit-
hout any help from the toolkit to create a new adap-
ted algorithm. The framework consists of three parts:
(1) movement planning with different navigation and
control algorithms, (2) computer vision for the analy-
sis of sensor data, and (3) SLAM methods and algo-
rithms. It currently includes Graph, EKF, Fast, RBPF,
and ICP-SLAM implementations but provides those
without usage rules, which transfers a lot of usage
effort to programmers. Furthermore, this platform
EDDY 2018 - Special Session on Adaptive Data Management meets Self-Adaptive Systems
416

offers implementations for communication with har-
dware components such as sensors and robots. With
the functionality and structure of the framework, it of-
fers a good extension point for the current feature tree
and the current implementation.
7 CONCLUSION
In this paper, in Section 3, we presented a novel
feature-based classification of SLAM algorithms as a
result of analyzing more than 40 existing algorithms
as shown in Table 1 and Figure 2. Next, in Section 4,
we introduced an approach to switch between SLAM
algorithms at runtime based on this classification. We
evaluated our approach using a prototypical imple-
mentation as described in Section 5.
Using the proposed classification reusable and ex-
changeable parts of SLAM algorithms are identified.
In consequence, the variation or exchange of running
SLAM algorithms is enabled. This, in turn, allows to
always use the most adequate algorithm depending on
the current framing conditions (e.g., in- vs. outdoor).
In future, we will extend the feature model and
add results from analyzing feature-oriented SLAM al-
gorithms and other new implemented SLAMs. This
leads to a higher amount of SLAM variants and cre-
ates the needs for extending the implementations of
the plan and execute phases to add adaptable analyze
algorithms for robots.
ACKNOWLEDGMENTS
This work has been funded by the German Re-
search Foundation within the Collaborative Rese-
arch Center 912 “Highly Adaptive Energy-Efficient
Computing”, within the Research Training Group
“Role-based Software Infrastructures for continuous-
context-sensitive Systems” (GRK 1907) and by the
German Federal Ministry of Education and Research
within the project “OpenLicht”.
REFERENCES
Ball, D., Heath, S., Wiles, J., Wyeth, G., Corke, P., and
Milford, M. (2013). OpenRatSLAM: an open source
brain-based SLAM system. Autonomous Robots,
34(3):149–176.
Blanco, J. L., Fernandez-Madrigal, J. A., and Gonzalez, J.
(2008). Efficient probabilistic Range-Only SLAM. In
IEEE/RSJ International Conference on Intelligent Ro-
bots and Systems, pages 1017–1022.
Bruno, L. and Robertson, P. (2011). WiSLAM: Improving
FootSLAM with WiFi. In International Conference
on Indoor Positioning and Indoor Navigation, pages
1–10.
Claraco, J. L. B. (2008). Development of scientific applica-
tions with the mobile robot programming toolkit. The
MRPT reference book. Machine Perception and In-
telligent Robotics Laboratory, University of M
´
alaga,
Spain.
Eliazar, A. and Parr, R. (2003). DP-SLAM: Fast, robust
simultaneous localization and mapping without pre-
determined landmarks. In 18th International Joint
Conference on Artifical Intelligence, volume 3, pages
1135–1142.
Endres, F., Hess, J., Engelhard, N., Sturm, J., and Bur-
gard, W. (2012). Online- 6D-SLAM f
¨
ur RGB-D-
Sensoren. Automatisierungstechnik Methoden und
Anwendungen der Steuerungs-, Regelungs-und Infor-
mationstechnik, 60(5):270–278.
Fossel, J., Hennes, D., Claes, D., Alers, S., and Tuyls, K.
(2013). OctoSLAM: A 3D mapping approach to si-
tuational awareness of unmanned aerial vehicles. In
International Conference on Unmanned Aircraft Sys-
tems, pages 179–188.
Grasa, O. G., Civera, J., and Montiel, J. M. M. (2011). EKF
monocular SLAM with relocalization for laparosco-
pic sequences. In IEEE International Conference on
Robotics and Automation, pages 4816–4821.
Grisetti, G., K
¨
ummerle, R., Stachniss, C., Frese, U., and
Hertzberg, C. (2010). Hierarchical optimization on
manifolds for online 2D and 3D mapping. In IEEE In-
ternational Conference on Robotics and Automation,
pages 273–278.
Grisettiyz, G., Stachniss, C., and Burgard, W. (2005). Im-
proving Grid-based SLAM with Rao-Blackwellized
Particle Filters by Adaptive Proposals and Selective
Resampling. In IEEE International Conference on
Robotics and Automation, pages 2432–2437.
G
´
erossier, F., Checchin, P., Blanc, C., Chapuis, R., and
Trassoudaine, L. (2009). Trajectory-oriented EKF-
SLAM using the Fourier-Mellin Transform applied to
Microwave Radar Images. In IEEE/RSJ International
Conference on Intelligent Robots and Systems, pages
4925–4930.
Gutmann, J. S., Eade, E., Fong, P., and Munich, M. E.
(2012). Vector Field SLAM–Localization by Learning
the Spatial Variation of Continuous Signals. IEEE
Transactions on Robotics, 28(3):650–667.
Hahnel, D., Burgard, W., Fox, D., and Thrun, S. (2003). A
highly efficient FastSLAM algorithm for generating
cyclic maps of large-scale environments from raw la-
ser range measurements. In IEEE/RSJ International
Conference on Intelligent Robots and Systems.
Heidenreich, F., Kopcsek, J., and Wende, C. (2008). Featu-
reMapper: Mapping Features to Models. In Compa-
nion of the 30th International Conference on Software
Engineering, pages 943–944. ACM.
Kaess, M. and Dellaert, F. (2009). Covariance re-
covery from a square root information matrix for
data association. Robotics and autonomous systems,
57(12):1198–1210.
Self-adaptive Synchronous Localization and Mapping using Runtime Feature Models
417

Kaess, M., Johannsson, H., Roberts, R., Ila, V., Leonard,
J., and Dellaert, F. (2011). isam2: Incremental smoo-
thing and mapping with fluid relinearization and in-
cremental variable reordering. In IEEE International
Conference on Robotics and Automation, pages 3281–
3288.
Kaess, M., Ranganathan, A., and Dellaert, F. (2007). Fast
Incremental Square Root Information Smoothing. In
20th International Joint Conference on Artifical Intel-
ligence, pages 2129–2134. Morgan Kaufmann Publis-
hers Inc.
Kaess, M., Ranganathan, A., and Dellaert, F. (2008). iSAM:
Incremental Smoothing and Mapping. IEEE Tran-
sactions on Robotics, 24(6):1365–1378.
Kerl, C., Sturm, J., and Cremers, D. (2013). Dense visual
SLAM for RGB-D cameras. In IEEE/RSJ Internati-
onal Conference on Intelligent Robots and Systems,
pages 2100–2106.
K
¨
ummerle, R., Grisetti, G., Strasdat, H., Konolige, K., and
Burgard, W. (2011). G
2
o: A general framework for
graph optimization. In IEEE International Conference
on Robotics and Automation, pages 3607–3613.
Kohlbrecher, S., Meyer, J., Graber, T., Petersen, K., Klin-
gauf, U., and von Stryk, O. (2014). Hector Open
Source Modules for Autonomous Mapping and Navi-
gation with Rescue Robots. In RoboCup 2013: Robot
World Cup XVII, pages 624–631. Springer.
Konolige, K., Grisetti, G., K
¨
ummerle, R., Burgard, W.,
Limketkai, B., and Vincent, R. (2010). Effi-
cient Sparse Pose Adjustment for 2D mapping. In
IEEE/RSJ International Conference on Intelligent Ro-
bots and Systems, pages 22–29.
Kwok, N. and Dissanayake, G. (2003). Bearing-only slam
in indoor environments using a modified particle filter.
In Australasian Conference on Robotics and Automa-
tion. University of Queensland.
Milford, M. J. and Wyeth, G. F. (2012). SeqSLAM: Visual
route-based navigation for sunny summer days and
stormy winter nights. In IEEE International Confe-
rence on Robotics and Automation, pages 1643–1649.
N
¨
uchter, A. (2008). 3D robotic mapping: the simultaneous
localization and mapping problem with six degrees of
freedom, volume 52. Springer.
Oursland, A. (2014). Java FastSLAM. http://
www.oursland.net/projects/fastslam/.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., and Ng, A. Y. (2009). ROS: an
open-source Robot Operating System. In ICRA works-
hop on open source software, volume 3, page 5.
Ranganathan, A., Kaess, M., and Dellaert, F. (2007). Loopy
SAM. In 20th International Joint Conference on Ar-
tifical Intelligence, pages 2191–2196. Morgan Kauf-
mann Publishers Inc.
Roussillon, C., Gonzalez, A., Sol
`
a, J., Codol, J.-M., Man-
sard, N., Lacroix, S., and Devy, M. (2011). RT-
SLAM: A Generic and Real-Time Visual SLAM Im-
plementation. In Computer Vision Systems, pages 31–
40. Springer.
Salas-Moreno, R. F., Newcombe, R. A., Strasdat, H., Kelly,
P. H., and Davison, A. J. (2013). Slam++: Simulta-
neous localisation and mapping at the level of objects.
In Computer Vision and Pattern Recognition, pages
1352–1359. IEEE.
Schroeter, C. and Gross, H. M. (2008). A sensor-
independent approach to RBPF SLAM - Map Match
SLAM applied to visual mapping. In IEEE/RSJ In-
ternational Conference on Intelligent Robots and Sys-
tems, pages 2078–2083.
Stachniss, C., Frese, U., and Grisetti, G. (2007). OpenS-
LAM. http://www.openslam.org.
Steux, B. and Hamzaoui, O. E. (2010). tinySLAM: A
SLAM algorithm in less than 200 lines C-language
program. In 11th International Conference on Con-
trol Automation Robotics Vision, pages 1975–1979.
Thrun, S., Fox, D., and Burgard, W. (2006). Probabilistic
Robotics. The MIT Press.
Tiar, R., Ouadah, N., Azouaoui, O., Djehaich, M., Ziane,
H., and Achour, N. (2013). ICP-SLAM methods im-
plementation on a bi-steerable mobile robot. In IEEE
11th International Workshop of Electronics, Control,
Measurement, Signals and their application to Me-
chatronics, pages 1–6.
Walter, M. R., Eustice, R. M., and Leonard, J. J. (2007). Ex-
actly Sparse Extended Information Filters for Feature-
Based SLAM. The International Journal of Robotics
Research, 26(4):335–359.
Wang, H., Li, C., Lv, H., and Chen, X. (2012). Research on
compressed EKF based SLAM algorithm for unman-
ned underwater vehicle. In 15th International IEEE
Conference on Intelligent Transportation Systems, pa-
ges 1402–1406.
Wang, Z., Huang, S., and Dissanayake, G. (2007). D-
SLAM: Decoupled Localization and Mapping for Au-
tonomous Robots. In Thrun, S., Brooks, R., and
Durrant-Whyte, H., editors, Robotics Research, pages
203–213. Springer.
Weißleder, S. and Lackner, H. (2013). Zwei Ans
¨
atze
zur automatischen modellbasierten Generie-
rung von Testf
¨
allen f
¨
ur variantenreiche Systeme.
Softwaretechnik-Trends, 33(2).
Zhao, L., Huang, S., and Dissanayake, G. (2013). Linear
SLAM: A linear solution to the feature-based and pose
graph SLAM based on submap joining. In IEEE/RSJ
International Conference on Intelligent Robots and
Systems, pages 24–30.
EDDY 2018 - Special Session on Adaptive Data Management meets Self-Adaptive Systems
418
