
Data-efficient Motor Imagery Decoding in Real-time for the Cybathlon
Brain-Computer Interface Race
Eduardo G. Ponferrada
1
, Anastasia Sylaidi
1
and A. Aldo Faisal
1,2,3
1
Department of Bioengineering, Imperial College London, London, U.K.
2
Department of Computing, Imperial College London, London, U.K.
3
Data Science Institute, London, U.K.
Keywords:
Brain-Computer Interfaces, Machine Learning, Cybathlon.
Abstract:
Neuromotor diseases such as Amyotrophic Lateral Sclerosis or Multiple Sclerosis affect millions of people
throughout the globe by obstructing body movement and thereby any instrumental interaction with the world.
Brain Computer Interfaces (BCIs) hold the premise of re-routing signals around the damaged parts of the
nervous system to restore control. However, the field still faces open challenges in training and practical
implementation for real-time usage which hampers its impact on patients. The Cybathlon Brain-Computer
Interface Race promotes the development of practical BCIs to facilitate clinical adoption. In this work we pre-
sent a competitive and data-efficient BCI system to control the Cybathlon video game using motor imageries.
The platform achieves substantial performance while requiring a relatively small amount of training data, the-
reby accelerating the training phase. We employ a static band-pass filter and Common Spatial Patterns learnt
using supervised machine learning techniques to enable the discrimination between different motor imageries.
Log-variance features are extracted from the spatio-temporally filtered EEG signals to fit a Logistic Regression
classifier, obtaining satisfying levels of decoding accuracy. The systems performance is evaluated online, on
the first version of the Cybathlon Brain Runners game, controlling 3 commands with up to 60.03% accuracy
using a two-step hierarchical classifier.
1 INTRODUCTION
Individuals suffering from severe neuromotor disor-
ders, such as Multiple Sclerosis, Spinal Cord In-
jury or Amyotrophic Lateral Sclerosis, face extra-
ordinary barriers in communicating with their envi-
ronment in their daily lives. Overcoming such bar-
riers through the use of technology, while achieving
successful adoption by the end-users remains an open
problem (Makin et al., 2017). Previous work in as-
sistive technology towards addressing this challenge
includes the development of a robotic arm control-
led by 3D eye-tracking which is able to assist rea-
ching movements (Maimon-Mor et al., 2017; Dzie-
mian et al., 2016; Tostado et al., 2016). This system
identifies movement targets based on binocular gaze
points and selectively employs a trigger to activate the
robotic arm. In a follow-up study, different methods
to control such triggers were evaluated, inferring that
blink detection can achieve better performance in ro-
botic control than electromyography (EMG) or voice
(Noronha et al., 2017). Despite this available range of
triggering approaches, the overall robust control of ro-
botic interfaces, remains substantially difficult for se-
verely paralyzed individuals, where movement is ex-
tremely limited. To address such cases, our lab has
previously developed an online non-invasive Brain-
Computer Interface (BCI) to control external envi-
ronmental entities with no muscle activity involved,
using deep learning techniques for multi-class closed-
loop motor imagery decoding (Ortega et al., 2018b;
Ortega et al., 2018a). Similar decoding strategies have
also been proven successful for offline BCIs in previ-
ous studies (Yang et al., 2015; Tabar and Halici, 2017;
Lu et al., 2017). Despite its decoding advantages,
this type of BCI uses supervised machine learning to
match brain activity to user intents, requiring a sig-
nificant amount of training data obtained throughout
lengthy training sessions. However, long training ti-
mes prior to BCI control pose a rejection risk from the
end-users’ side and can impair a mainstream adoption
process.
To address this limitation, here, we develop a data-
efficient BCI system, which maintains decoding per-
Ponferrada, E., Sylaidi, A. and Faisal, A.
Data-efficient Motor Imagery Decoding in Real-time for the Cybathlon Brain-Computer Interface Race.
DOI: 10.5220/0006962400210032
In Proceedings of the 6th International Congress on Neurotechnology, Electronics and Informatics (NEUROTECHNIX 2018), pages 21-32
ISBN: 978-989-758-326-1
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
21

formance, while reducing the amount of required trai-
ning data, thereby facilitating successful BCI adop-
tion in a clinical setting. Data-efficient BCI sys-
tems have been previously proposed primarily for off-
line motor imagery decoding (Ferrante et al., 2015).
Generally, to this date, the majority of BCI rese-
arch is dominated by offline decoding studies (Yang
et al., 2015; Tabar and Halici, 2017; Lu et al., 2017;
Zhang L. and Wang, 2010; Obermaier et al., 2001),
with only a few online testing cases of non-invasive
BCIs (Holz et al., 2015). Our system builds upon
these emerging approaches.
The Cybathlon (Riener and Seward, 2014) is a
competition in which people with disabilities com-
pete in a series of motor control activities using ad-
vanced assistive technology. The Cybathlon’s Brain-
Computer Interface Race is one of the presented acti-
vity tests intended for individuals with neuromotor
disorders, that consists of a competitive racing video
game, during which participants have to control an
avatar using strictly their brain activity.
Our system is particularly focused towards deve-
loping a competitive platform for the Cybathlon BCI
Race task, motivated by encouraging recent online de-
coding results within the same context (Ortega et al.,
2018a) (Schwarz et al., 2016).
The data-efficient BCI system we developed in
order to tackle the Cybathlon challenge, is based
on Common Spatial Patterns (Ramoser et al., 2000)
(CSP) and a logistic regression classifier (Tomioka
et al., 2007) to decode motor imageries.
The video game mechanics are simple. The players
of the game run on a given track at steady velocity
throughout the whole duration of the race. The track
occasionally changes colors to indicate switches in
desired commands and the players have to execute
these commands efficiently in order to obtain an ad-
vantage. Executing the wrong command whilst on a
coloured section, as well as sending any command
whilst on the grey (baseline) area of the track will
make the avatar fall behind by a few seconds. The
first player reaching the finish line wins the game.
Our system was developed and adjusted for the
first version of the Cybathlon Brain Runners video-
game. It is worth noting that this version was the
first release of the Cybathlon videogame, which be-
came significantly harder in the final version used in
the competition.
The Cybathlon BCI Race rules state that the game
must be controlled using strictly brain activity. We
decided to control the execution of each one of the
commands using motor imageries, namely, thoughts
of executing different intuitive body movements. We
thus developed a system able to decode motor thoug-
hts and execute their associated video game command
in real time. We treated the no-command -necessary
when the avatar is on the grey sections of the track-
as an additional command, amounting to four alter-
native motor imageries altogether, available for deco-
ding. The motor imageries we decoded for control
purposes consisted on imaginations of opening and
closing the right hand, opening and closing the left
hand, flexing and relaxing both feet at the ankle (dor-
siflexion) and contracting and relaxing the abdominal
muscles. Figure 1 presents the association between
section colour and motor imageries.
Figure 1: Association of game events with motor imageries.
2 METHODS
The BCI system is composed of two main modules.
The first one is the offline training pipeline in which
the parameters of the BCI model are learn using user-
specific supervised machine learning models trained
on EEG recordings. The second module consists
on the online decoding system, which performs real-
time data streaming and inference using the model le-
arnt during the offline training process to decode the
player’s intention continuously.
2.1 Training Pipeline
The aim of the BCI Training pipeline is to learn the
parameters of a machine learning model for motor
imagery detection that will later be used for real-time
motor imagery decoding. These parameters are a set
of CSP filters (Ramoser et al., 2000) for feature ex-
traction and the parameters of a Logistic Regression
classifier. The training pipeline is shown on Figure 2.
The system was trained on two healthy subjects who
had never participated in BCI studies or used any BCI
system before - one of them (LG) was a twenty one
year-old left-handed male and the other one (EG) was
a twenty three year-old right-handed male. Informed
NEUROTECHNIX 2018 - 6th International Congress on Neurotechnology, Electronics and Informatics
22

consent was obtained and the study was performed ac-
cording to institutional standards for the protection of
human subjects. In this section we describe the details
of the training pipeline.
Figure 2: BCI model training: Labeled EEG recordings of
motor imageries are fed to the training pipeline. The sig-
nals are band-pass filtered between 7 and 30 Hz to capture
the mu and beta frequency bands associated to sensorimotor
rhythms. The band-pass filtered data is used to fit the Com-
mon Spatial Patterns, obtaining pairs of filters, such that one
maximizes the variance of one specific motor imagery and
minimizes the variance of another one, and the other filter
does the opposite. The logarithm of the variance of the spa-
tially filtered sources are used as the features to fit a Logistic
Regression classifier. Variations of the model were perfor-
med using 2-4 motor imageries to classify.
Experimental Setup for Training Data Acquisition
The subject sits in a comfortable chair at approxima-
tely 70 centimeters away from a computer screen. The
EEG signal is recorded using a Brain Products’ Easy-
Cap with 32 Ag-AgCl active actiCAP electrodes loca-
ted according to the International 10-20 system. High
viscosity electrolyte gel for active electrodes is used
to reduce the impedance between the electrode and
the scalp under a tolerance level of 50 KOhm. 5 elec-
tromyogram (EMG) bipolar pairs of electrodes are lo-
cated on the subject’s right and left forearm (around
the extensor retinaculum area), on the right and left
feet (around the extensor retinaculum area) and on the
torso (around the rectus abdominis area). One pair of
bipolar electrooculogram (EOG) electrodes are loca-
ted around the vertical vEOG up and vEOG down lo-
cations. Figure 3 shows the experimental setup. The
BCI user watches game-play videos of the game and
executes motor thoughts when the avatar reaches dif-
ferent sections of the race track. The motor imageries
consist on imaginations of opening and closing the
right hand, opening and closing the left hand, flexing
and relaxing both feet at the ankle (dorsiflexion) and
contracting and relaxing the abdominal muscles and
their associated game events are detailed on Figure 1.
This way we are able to gather and label motor ima-
gery data from a 32-electrode EEG cap. Note that for
this study, we used the first version of the Cybathlon
Brain Runners videogame, which differs from the fi-
nal one used in the Cybathlon competition. In order
to homogenize the number of pads of each class, the
five videos that maximized the homogeneity on the
number of pads of each type were selected, yielding
a total number of 90 trial events (22 green, 23 pur-
ple, 23 yellow and 22 grey). Each of these five videos
was repeated four times during the experiment, thus,
a total of 20 videos were played containing a total of
360 trial events (88 green, 92 purple, 92 yellow and
88 grey). Performing motor imageries is a tiring task,
so after each trial, the subject is allowed to rest and a
black screen appears informing him how many videos
he has already completed and asking him to press a
key to continue with the new video whenever he feels
prepared.
Figure 3: Experimental setup for training data acquisition
(the first author shown using the systems in the photograph).
The subject sits on a comfortable chair with the 32 active
electrodes cap recording his EEG signal, 5 pairs of bipolar
EMG recording his muscle activity and one pair of bipolar
EOG electrodes recording his eye movements and blinks.
Training the BCI Model
After collecting and labelling training data for the
different motor imageries for a given user, we feed
it to the training pipeline. Our approach focuses on
spectral and spatial filtering, using a band-pass filter
and learnt Common Spatial Patterns respectively
in event-locked time windows in order to capture
Event-Related-Desynchronisation (ERD) and Event-
Related-Synchronisation (ERS) features associated
to the motor imageries (Neuper et al., 2006). Once
the features of interest are extracted through spectral
and spatial filtering, we use them to fit a Logistic
regression classifier to discriminate across the diffe-
rent motor imageries. For clarity reasons, this paper
first describes the training platform to decode two
motor imageries and later on, an adaptation for for
multi-class classification. The training process as
Data-efficient Motor Imagery Decoding in Real-time for the Cybathlon Brain-Computer Interface Race
23

shown on Figure 2, consists on band-pass filtering,
selecting a time-window, fitting the CSP filters, spa-
tially filtering the signal using the learnt CSP filters,
extracting log-variance features and fitting a classifier.
Band-pass Filtering and Time-window Selection
The first step on the training process is band-pass fil-
tering the labeled EEG recordings. ERD and ERS
on the sensorimotor cortex are features observed on
EEG signals associated with motor imageries that are
prominent on the µ and β frequency bands. In order
to capture these events, the EEG recording is band-
pass filtered using a Finite Impulse Response (FIR)
filter with cutoff frequencies between 7 and 30 Hz and
using a pass-band ripple of -20 dB and a stop-band
ripple of -40 dB.
ERD/ERS are shown to be active from 0.5
seconds after the stimulus onset and last between
2 and 3 seconds (Neuper et al., 2006). Thus, the
EEG chunk of interest for our motor imagery control
purpose is contained within this time-window. We
were also interested on building a BCI system that
reacts as fast as possible to the user’s intent, for
online decoding purposes. To achieve this, ideally,
we would use the shortest possible time-window
while keeping enough information on the EEG signal
to provide a reliable decoding. Considering this,
we selected a time window from 0.5 seconds after
the motor imagery onset until 2.5 seconds after the
motor imagery onset, obtaining multiple samples of
2-seconds long labeled time-series to train the system
capturing ERD/ERS events.
Learning Optimal CSP Filters
Common Spatial Patterns (Ramoser et al., 2000) are
pairs of filters that linearly transform the multichannel
time series of an EEG signal into lower-dimensional
time series in such a way that the first filter maximizes
the voltage variance across time of signals of Class A,
while minimizing the variance of signals of Class B
and the second filter does the opposite, it minimizes
the variance of signals of Class A and maximizes the
variance of signals of class B. Class A and B are two
different motor imageries.
We show this in Figure 4, on a left-hand versus
right hand motor imagery trial. If we observe the
voltage distribution on a given trial on the C3 and C4
EEG channels, located on the left and right hemisp-
here of the motor cortex respectively (Figure 4A), we
can observe that the voltage distribution of both clas-
ses have an important amount of overlap and thus, the
variance of both clusters on each channel would not
be a good feature to separate the different-class trials
using a linear classifier. After filtering with a pair of
learnt spatial filters on Figure 4B, the signals obtai-
ned for the first source S1 (after filtering with the first
CSP filter 1), are maximal in variance for the blue
cluster, corresponding to left hand movement and mi-
nimal for the red cluster, corresponding to right hand
movement. The opposite happens with the second
source S2 (after filtering with the converse CSP fil-
ter 2). In this case the red cluster, corresponding to
right hand movement event has maximal variance and
the blue cluster, corresponding to left hand movement
have minimal variance. The signals are now much
more linearly separable by extracting variance-based
features.
Figure 4: A) The distribution of a raw EEG signal of a right
hand trial (red) and left hand trial (blue) before the Com-
mon Spatial Filters are applied. B) Same trials after spatial
filtering using a single pair of optimized CSP filters.
The supervised Machine Learning algorithm to learn
the CSP filters are is described as the following gene-
ralized eigenvalue problem, using the left versus right
hand motor imageries for illustration purposes:
We compute the average covariance matrices for each
class over all trials of our band-pass filtered 2-second
long time-series training dataset, obtaining Σ
L
and
Σ
R
, for left and right hand classes respectively, and
find the simultaneous diagonalizer W of Σ
L
and Σ
R
:
W
T
Σ
L
W = D
L
W
T
Σ
R
W = D
R
(1)
Such that the diagonal matrices D
L
and D
R
, fol-
low:
D
L
+ D
R
= I
(2)
This formulates a generalized eigenvalue problem
of the form:
Σ
L
W = λΣ
R
W
(3)
This is satisfied for W consisting of the generalized
eigenvectors w
j
( j=1,, C) and λ being: λ = λ
L
/λ
R
and λ
j
C
(c ∈ {L,R}), the diagonal elements of D
L
and
D
R
, respectively. It is important to note that λ
C
j
≥ 0,
is the variance of class c in the CSP source j, and that
NEUROTECHNIX 2018 - 6th International Congress on Neurotechnology, Electronics and Informatics
24

λ
j
L
+ λ
j
L
= 1. Thus, a value λ
j
L
close to one, means
that the spatial filter w
j
yields a high variance in the
left hand class and a low variance on the right hand
class and the opposite if it is close to zero. This makes
both classes easily discriminative by computing the
variance across time on the CSP filtered time series.
Once we obtain the eigenvectors matrix, we take
the n first and the n last columns of W (n = 3 in our
case), as they are maximally informative to extract va-
riance features. The pair of filters composed by the
first and last columns are the ones that provide max-
imal discriminative information between the variance
of the two classes, but the rest n − 1 pairs provide ro-
bustness for classification.
Since the Common Spatial Patterns are vectors of
dimension equal to the number of EEG channels, they
can be visualized using bipolar plots, which provide
useful information regarding the EEG channels that
are enhanced or suppressed to provide maximal
discrimination between classes and gives us a good
intuition about which areas of the brain the CSP
filter pairs are trying to extract information from.
An example of the bipolar plot of a pair of common
spatial filters optimized for subject EG2608’s right
hand versus left hand data is shown on Figure 5.
CSP Pattern 1 shows that the filter is amplifying the
depolarization associated with the activation of the
left hemisphere on the motor cortex, which is known
to be related to right hand movements. CSP Pattern 2,
in contrast, amplifies the depolarization of a similar
area of the motor cortex but in the right hemisphere,
associated to left hand movements. The visualization
of these filters, thus, provide a good interpretation
on whether the CSP filters are capturing ERD/ERS
features or other irrelevant EEG patterns, such as
artifacts, in which case we would observe a strong
weighting on the frontal electrodes. The visualization
of spatial filters also provide with an estimation on
which parts of the brain are being activated associated
to different motor imageries, which can vary across
different subjects and can be taken into account to
decide which motor imageries a specific subject
should use to control the BCI video game.
Fitting a Logistic Regression Classifier
After fitting the CSP filters, we extract variance featu-
res on the spatially filtered signal that are informative
of the underlying motor imagery.
First, we filter all time series of each class with
the spatial filters. An EEG time-series is X ∈ R
t×c
being t, the number of time steps contained on the 2
seconds epoch, (t = 1000 in our case, as signals are
sampled at 500 Hz) and c the number of channels of
Figure 5: Bipolar plot of the first pair of Common Spatial
Patterns from subject EG2608 optimized for the classifica-
tion between right hand (CSP Pattern 1) and left hand (CSP
pattern 2). CSP Pattern 1 shows that the filter is strongly
weighting the left hemisphere of the motor cortex, associa-
ted to right hand movements. The second filter of the pair,
CSP Pattern 2, in contrast, strongly weights the the right
hemisphere of the motor cortex, associated to left hand mo-
vements. The colour map represents the weights assigned
to each of the channels by the spatial filters, dark blue being
the highest and red being the lowest. Bipolar plots crea-
ted using BCILAB (Kothe and Makeig, 2013) using a cubic
interpolation of W
−1
.
the EEG signal (31, in our case). Our learnt CSP fil-
ters are, W ∈ R
t×2n
, being n the number of pairs of
filters being used (columns of the eigenvector matrix),
which is n = 3 in our case. Thus, each filtered time-
series S ∈ R
t×2n
becomes:
S = XW
(4)
We then extract features from the spatially filtered sig-
nals, which are discriminative with respect to their va-
riance. Thus, we build a feature space based on the
logarithm of the variance of S across time. The loga-
rithm compresses the range and reduces the impact of
outliers.
The features f ∈ R
1×2n
, are thus:
f = log(var(S))
(5)
We finally used the extracted features to train the L2-
regularized Logistic Regression classifier using BCI-
LAB (Kothe and Makeig, 2013), which is built upon
the LIBLINEAR (Fan et al., 2008) and CVX (Grant
and Boyd, 2008) packages.
In order to evaluate the classification perfor-
mance, we ran a 5-fold cross-validation on the
training dataset. Importantly, to avoid correlation
between nearby trials, we performed a block-wise
cross validation leaving 5 trials out between the
training and test blocks. Doing so attempts to remove
correlated trials between training and test sets on
each cross-validation split to avoid unrealistic offline
decoding accuracy results.
Multi-class Motor Imagery Classification
CSP generates optimized spatial filters to discriminate
between two motor imageries by linearly transfor-
Data-efficient Motor Imagery Decoding in Real-time for the Cybathlon Brain-Computer Interface Race
25
ming the EEG signal to maximize or minimize the va-
riance of one of the pair of motor imageries. Despite
its binary nature, it can be extended to work with more
than two classes by computing the filters for all pos-
sible pairs of classes and fitting classifiers for all pos-
sible pairs. We then compute the normalized probabi-
lity of each class across all binary Logistic Regression
classification tasks and select the class with maximum
probability.
As an alternative, we also developed a two-step hier-
archical binary classifier. For the first step, we fit a
model to classify the motor imagery associated to the
no-command signal against all the rest of motor ima-
geries. The second step is the standard classification
problem as described before for the remaining motor
imageries.
The decoding then starts on the first step, using a
Logistic Regression classifier. If the rest of the classes
wins against the no-command class, then the system
enter the second decoding step to classify which is
the most likely motor imagery out of the rest of the
classes using a Logistic Regression classifier.
2.2 Real-time BCI Module
Once the parameters of the BCI model have been
estimated running the training pipeline, they are used
to decode the mental state of the BCI user in real
time and send commands to control the video game
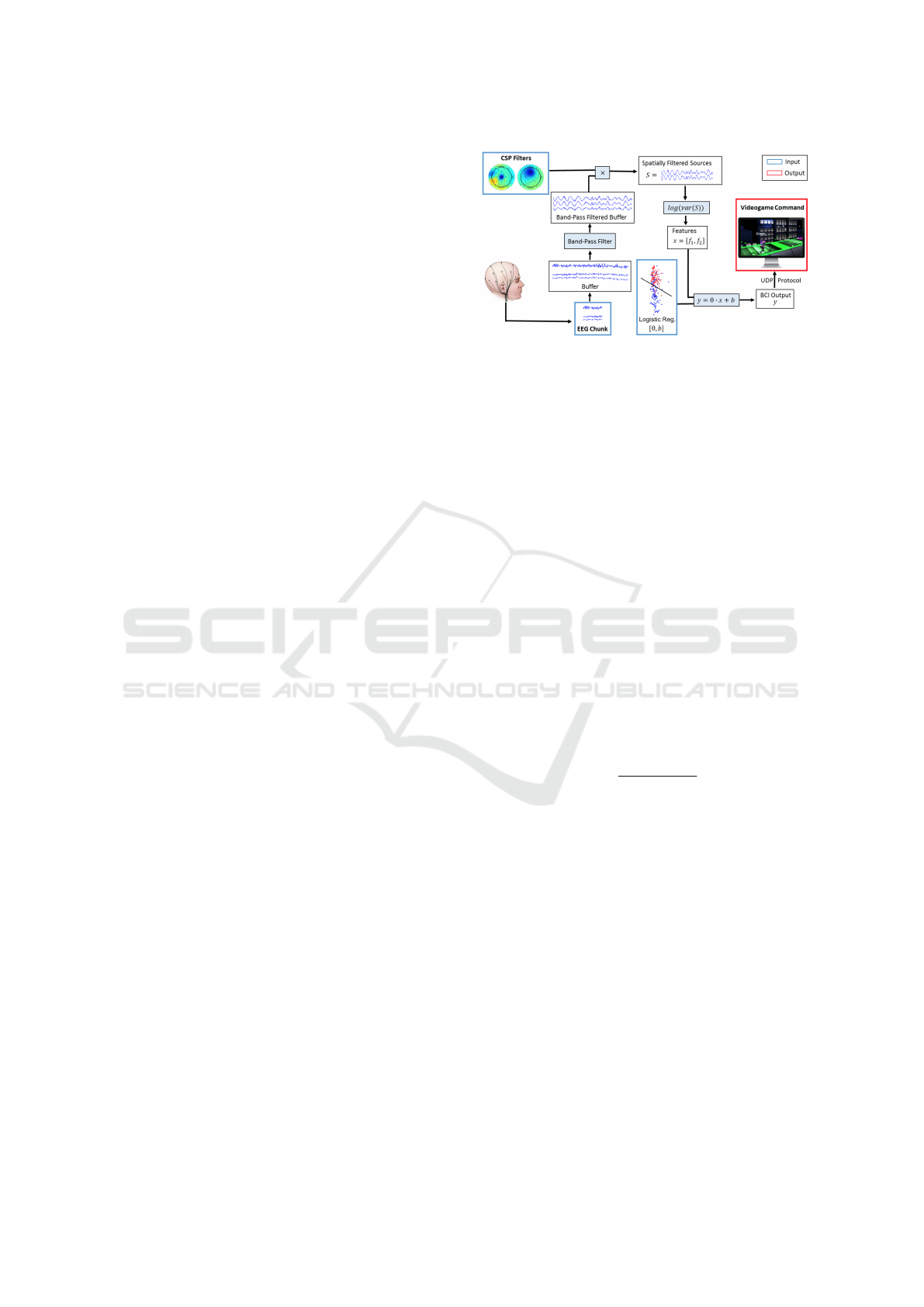
accordingly. Figure 6 summarizes the transition
from the real-time acquisition of EEG data to the
translation of this information into a videogame
command. In this section we describe the details of
real-time BCI module.
From an EEG Signal to a Video Game Command
In this section, we describe the specific case for two
classes and a Logistic Regression classifier is explai-
ned, although variations using more than two classes
were also implemented.
We used a modified version of the RDA Server for
the BrainVision Recorder, streaming the data directly
from the PyCorder recording software into MATLAB.
A 10 seconds ring buffer was implemented and upda-
ted every 50 milliseconds.
The 10 seconds-long RDA server buffer is filte-
red using a Finite Impulse Response (FIR) filter with
cutoff frequencies between 7 and 30 Hz and using a
pass-band ripple of -20 dB and a stop-band ripple of
-40 dB. Once the buffer is band-pass filtered, just the
last two seconds are used for decoding, matching the
time window length used to train the BCI model. The
reason for using a 10 seconds buffer for filtering is
Figure 6: Real-Time Decoding BCI module. A chunk of
EEG data is streamed into a buffer of 10 seconds length
every 50 milliseconds. This buffer is accessed by the deco-
ding thread, which first applies a band-pass filter between
7 and 30 Hz. Then, it takes the most recent 2 seconds of
the buffer and applies the CSP filters computed on the trai-
ning pipeline to it, obtaining a set of spatially filtered sig-
nals. The feature vector is obtained by computing the log-
variance of the signals across time. The log-variance feature
vector is classified using the Logistic Regression classifier.
The BCI system finally sends the corresponding command
to the video game system via UDP Protocol.
that the band-pass filter transients might distort the
first time steps of the signal, but the last two seconds,
which are the part we are interested on, are free of
distortions.
The 31-channel, 2 seconds-long EEG signal is
spatially filtered with the 3 pairs of CSP filters produ-
cing a time series of 2 seconds and 6 source channels.
The logarithm of the variance of each of these time
series is computed to produce a feature vector, which
is finally classified using the logistic regression clas-
sifier:
y =
1
1 + e
−(xw+b)
(6)
Being x ∈ R
1×2n
the log-variance feature, n the num-
ber of pairs of filters (3 in our case) and w and b the
parameters of the Logistic Regression Classifier. y is
a probabilistic output informative about the probabi-
lity of the input signal belonging to class 1 (e.g Right
Hand motor imagery) and the converse 1 − y is the
probability of the input signal to belonging to class 2
(e.g. Left Hand motor imagery).
Finally, we map the classification output to a
video game command. The video game has three
commands that execute different actions. In order to
send these commands to the video game, a specific
value has to be sent via UDP protocol to the specific
IP address of the game. In order to achieve a good
performance on the Cybathlon video game, it is im-
portant not to decode the wrong command, especially
during the grey pads within which no command must
be sent for a long period of time. For this reason,
NEUROTECHNIX 2018 - 6th International Congress on Neurotechnology, Electronics and Informatics
26

we adopted a conservative strategy to avoid false
positives and we only sent a command when a motor
imagery is decoded with a probability of 0.8 or higher
and a no-command otherwise.
Feedback to Improve Control of the System
The Real-Time BCI system provides feedback to the
user by displaying bars, representing the probability
of each of the motor imageries. This visual feedback
is very important in order for the user to be able to
adapt to the system. As in any natural learning task,
after some practice using the system, the user will be
able to adapt his brain activity to improve his skills
controlling the system.
A Brain-Computer interface is a system in which
both the computer and user’s brain activity must adapt
to each other to achieve an optimal performance. The
computer learns from the user through supervised ma-
chine learning and the user learns how to best control
the system through continuous training.
Once the users feel comfortable controlling the
BCI, they start using the system to control the Cy-
bathlon video game.
3 RESULTS
In the first part of his section, we introduce our re-
sults evaluating our decoding accuracy offline, using
cross-validation on the acquired training data. In the
second part, we characterise the online decoding sy-
stem. Finally, we evaluate the real time decoding per-
formance.
3.1 Offline Classification
We performed the described 5-fold block-wise cross-
validation to evaluate the training pipeline perfor-
mance. In this section we show the accuracy results
for all possible combinations of two and three motor
imagery decoding and the results for four motor ima-
gery decoding on two different subjects. Accuracy is
defined as:
Accuracy(%) = (Correct/Total) × 100
(7)
For two motor-imagery classification, the results on
all combinations of two pairs of motor imageries
using CSP with a Logistic Regression classifier are
reported on this section. The bars represent the accu-
racy on the classification of pairs of classes. The clas-
ses are labeled as S for thinking about contracting ab-
dominal muscles (stomach), RH for thinking about
opening and closing the right hand, LH for thinking
about opening and closing the left hand and F for thin-
king about expanding and contracting the feet. The
red line represents the chance level and the pink area
represents a 95% confidence interval for the chance
level (M
¨
uller-Putz et al., 2008). The blue bars repre-
sent the standard deviation for the classification accu-
racy.
Results for subjects LG2807 and EG2608 are
shown on Figure 7. In the case of LG2807, our sy-
stem is able to differentiate between right hand and
feet with an accuracy of up to an 84.44%, however
it is unable to differentiate between some other motor
imageries, such as the case of stomach versus feet, for
which the classification accuracy is within the chance
level range. For subject EG2608, our system is able
to decode three of the pairs of motor imageries with
up to an 81.67% accuracy for right hand versus left
hand classification. However, it is unable to differen-
tiate between other pairs, such as the case of stomach
versus feet.
Similarly to the two-motor imagery case, the clas-
sification results using CSP with a Logistic Regres-
sion on all combinations of three motor imageries are
shown on Figure 8 and the classification results for
the four motor imageries is shown in Figure 9. The
way in which the data is represented is equivalent to
the two motor imageries case.
The commands that subject LG2807 can best con-
trol for practical BCI purposes are feet versus right
hand, with an 84.44% accuracy for two classes, right
hand versus left hand versus feet with a 62.4% accu-
racy and for the four classes the decoding accuracy is
48.61%.
In the case of subject EG2608, the commands that can
be best controlled are right hand versus left hand with
an 81.67% accuracy for two classes, right hand versus
left hand versus feet with a 56.65% accuracy for three
classes and the decoding accuracy for the four classes
is 44.72%.
3.2 Real-time BCI Characterization
We describe the real-time BCI system characteristics
as:
Decoding delay: t
d
= 0.1214 ± 0.0031 seconds.
Decoding time-window length: t
w
= 2 seconds.
ERD/ERS delay: t
ERD/ERS
= 0.5 seconds.
The decoding delay refers to the minimum period of
time that it takes for our system to perform a full de-
coding task, this is, since the moment in which the
raw EEG data enters ours system until the moment
in which the decoded command is sent to the video
Data-efficient Motor Imagery Decoding in Real-time for the Cybathlon Brain-Computer Interface Race
27
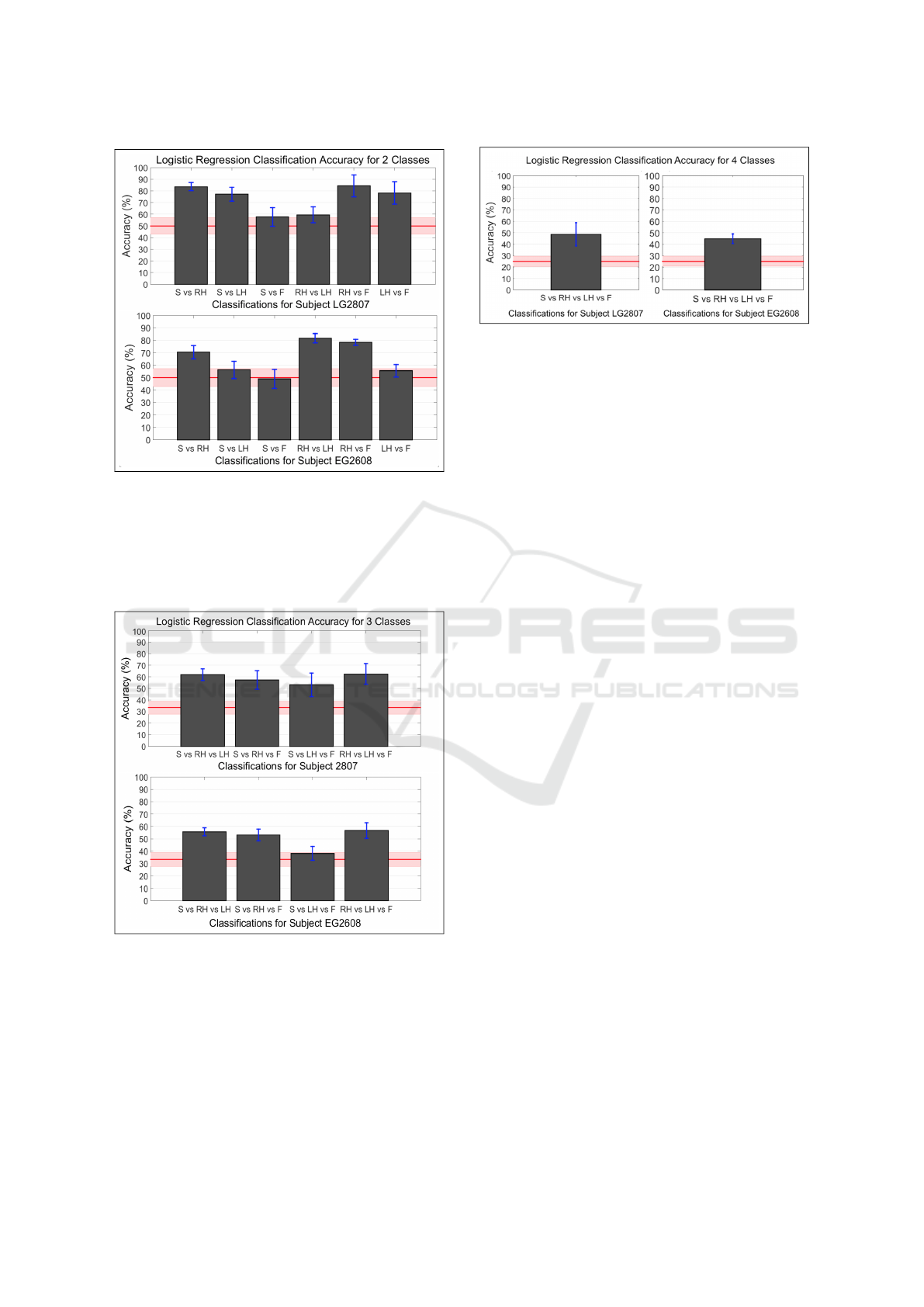
Figure 7: Classification accuracy between two motor ima-
geries for subjects LG2807 (top) and EG2608 (bottom)
using CSP with a Logistic Regression classifier. Motor ima-
geries are labeled as: S = Stomach, RH = Right Hand, LH
= Left Hand, F = Feet. The red line represents chance label
and the pink area is a confidence interval for chance level.
The blue bars represent the standard deviation for the clas-
sification accuracy. (These apply to all other figures).
Figure 8: Classification accuracy between three motor ima-
geries for subject LG2807 (top) and EG2608 (bottom) using
CSP with a Logistic Regression classifier. Using the same
legend described in Figure 7.
game system. This time is on average t
d
= 121 mil-
liseconds. The decoding response, however is limi-
ted by the length of the time window that we need to
use for the decoding. The EEG features that we are
using are relatively slow, at a maximum frequency of
Figure 9: Classification accuracy between four motor ima-
geries for subject LG2807 (top) and EG2608 (bottom) using
the CSP with an Logistic Regression classifier. Using the
same legend described in Figure 7.
30 Hz and even in the ideal case in which we would
be able to identify an ERD/ERS feature instantly, we
would still have a t
ERD/ERS
= 0.5s lag, which is an
intrinsic delay associated to these specific EEG featu-
res (Neuper et al., 2006). For training, we use a time
window between 0.5 seconds until 2.5 seconds after
the event onset, in order to capture ERD/ERS events.
For this reason, we need to keep a consistent in the
time-window length for real-time decoding, t
w
= 2s.
3.3 Real-time BCI Decoding Results
The real-time system was tested on one right-handed
subject, EG2608 using CSP with a Logistic Re-
gression classifier using two and three commands
respectively. This was the second session for this sub-
ject. First, the subject completed the training phase
to optimise the CSP filters and Logistic Regression
classifier for this second session. This time, however,
his offline performance was significantly lower than
the during the first session, obtaining a maximum
of 62.5% accuracy on two-class decoding for right
hand versus feet, a maximum of 52.29% accuracy for
three-class decoding for right hand versus left hand
versus feet. The subject then played the Cybathlon
game under three different conditions:
The first condition consisted on two commands
decoding using a standard binary classification.
Right hand motor imagery was assigned to control
the baseline command and stomach motor imagery
to control the accelerate command. The average
accuracy across 10 game rounds was: 68.62 %
The second condition consisted on three commands
using a three class classification. Right hand motor
imagery was assigned to control the accelerate com-
mand, stomach motor imagery to control the jump
command and left hand motor imagery to control the
baseline command. The average accuracy across 3
NEUROTECHNIX 2018 - 6th International Congress on Neurotechnology, Electronics and Informatics
28

game rounds was: 47.66%
The third condition consisted on three commands
decoding using a two-step hierarchical classifier.
Right hand motor imagery was assigned to control
the accelerate command and stomach motor imagery
was used to control the jump command. The first
step of the hierarchical classifier decides wether any
of the imageries are active and if the threshold is
greater than 0.8, it makes a prediction using the right
hand versus stomach classifier. If any of the motor
imageries are decoded, its respective command is
sent, otherwise no command is sent. The average
online-decoding accuracy across 3 game rounds was:
60.03 %
The subject was not able to complete the online 4-
class decoding task as he struggled to achieve control
for 4 commands on the feedback phase. A snapshot of
the subject playing the Cybathlon video game using
motor thoughts is shown on Figure 10.
Figure 10: A subject plays the Cybathlon video game using
thoughts. The three bars at the right of the screen represent
the probability of a specific motor thought to be decoded. In
this snapshot the subject is successfully executing a jump.
4 DISCUSION
In this work we demonstrate how a data-efficient
EEG-based online BCI system can achieve competi-
tive results on the Cybathlon BCI race task. The main
advantage of our system is that it requires a small
amount of training data, effectively translating in
short data acquisition sessions prior to live BCI usage
and potentially improving the BCI user experience.
Our system was able to achieve an average decoding
accuracy across subjects of 86%, 62% and 49%
for the offline classification of two, three and four
motor imageries respectively, evaluated using a
correlation-corrected cross-validation approach. Our
system was also able to achieve an online decoding
accuracy of up to 60.03% controlling 3 commands,
while only requiring the acquisition of 360 motor
imagery trials.
Considerations Regarding CSP-based BCIs
Common Spatial Patterns have some drawbacks (To-
mioka et al., 2007). CSP were originally described as
a decomposition technique (Koles, 1991) rather than a
tool for classification based on variance features. No-
netheless they have been extensively used for classifi-
cation purposes in motor imagery based BCI applica-
tions with success.
One important problem, however, is that the si-
multaneous diagonalization of the covariance matri-
ces suffers greatly from the presence of even a small
amount of outlier trials on the EEG dataset, such as in
cases of artifact presence.
Moreover, the nature of the CSP filters is binary.
They attempt to maximize the difference in variance
between pairs of classes. They can be extended to
multi-class tasks as we described on the methods
section but they are not directly optimized for multi-
class classification. Besides this workaround, other
alternatives to multi-class CSP have been attempted
in the past and might pose an appropriate choice for
the given problem (Grosse-Wentrup and Buss, 2008).
Previous Results on the Cybathlon BCI
Ortega et al. proposed an alternative decoding route
on their BCI for the Cybathlon using a Convolutional
Neural Network, consisting of a convolutional layer,
followed by a fully connected layer and a softmax
(Ortega et al., 2018a). They reported results for 4-
class decoding, using a 4-fold cross-validation, both
offline and online, obtaining up to 54.5% accuracy
offline, which shows that optimizing the data acqui-
sition approach to gather a larger dataset (9000 sam-
ples), allows deep neural networks to improve perfor-
mance compared to simpler linear classifications on
smaller datasets. Additionally, they reported 47% on-
line accuracy for 4-class decoding.
Schwartz et al. also showed relevant results on
their Cybathlon BCI system, using two CSP projecti-
ons, extracting 12 power-band features and fitting a
shrinkage regularized Linear Discriminant Analysis
(Schwarz et al., 2016). They collected 1230 trials
and obtained a 66.1% median accuracy offline, on the
best combination of motor imageries using right hand
versus left hand versus feet versus rest, which inte-
restingly indicates a large improvement compared to
their results using four motor imageries. These results
demonstrate that including a rest state and gathering
more data can boost decoding performance. They also
Data-efficient Motor Imagery Decoding in Real-time for the Cybathlon Brain-Computer Interface Race
29

reported a drop in online performance for 4-class de-
coding, down to 51.2% accuracy across all user deci-
sions.
One of the reasons why our results may dif-
fer from the previous studies discussed above is the
choice of a different cross-validation method. In pre-
vious work, a standard block-wise cross-validation
was chosen. Instead, we attempted to propose a more
robust cross-validation technique, which corrects for
highly correlated contiguous trials between training
and test blocks by discarding the 5 trials in between
them for each split of our block-wise cross-validation.
Correlated trials between training and test sets might
be one of the factors involved in the offline to online
accuracy drop reported in previous work, but perhaps
not the only one. Note, that, even by using this ad-
vanced cross-validation technique to correct for cor-
related trials across training and test sets, we also
experienced an offline to online accuracy drop on 3-
classes decoding (although better results were obtai-
ned online than offline for the 2-class decoding case).
This suggests that there could be additional factors
involved in the offline to online accuracy drop. On
the whole our platform manages to offer correlation-
corrected cross-validation results for offline decoding,
which are at competitive levels of performance com-
pared to previous approaches, while significantly re-
ducing the amount of training data needed to operate
the BCI (360 samples compared to thousands of sam-
ples employed in other studies). It thereby poses a so-
lid decoding system that is aimed at managing more
efficiently the trade-off between decoding accuracy
and the length of training sessions.
For online BCI decoding tasks other than the
Cybtahlon, previous studies have shown promising
results on time-locked tasks. Friedrich et al. achieved
accuracies for 4-class decoding ranging between 61%
and 72% on 14 subjects, where 8 of them achieved
performance over the chance level for all 4 classes,
including motor and non-motor imageries (Friedrich
et al., 2013). In the case of 3-class decoding, Milln
et al. showed accuracies ranging between 55% and
76% across 5 subjects, also including both motor and
non-motor imageries (Mill
´
an et al., 2004).
Comparing Offline and Online Results
Results on real time decoding accuracy for subject
EG2608 showed a classification accuracy of 68.62%,
surpassing the offline cross-validation results for the
same subject and session (62.5%). After several ga-
mes, the subject was able to achieve good control
over the video game tracks where only two commands
were needed.
In the case of three commands, the online accu-
racy was 47.66%, showing a drop compared to the
52.29% accuracy obtained offline, evidencing that the
control of three commands is much more challenging.
We also demonstrated that 3-class accuracy can be
greatly improved by using a two-step classification
scheme, which executes binary classification on each
step, obtaining a 60.03% accuracy.
In the three commands case, the subject reported
that control was possible provided enough concentra-
tion but significantly harder than the two commands
case. The subject also attempted 4-class decoding,
however, during the feedback phase, the subject was
unable to achieve meaningful control. It is worth noti-
cing that previous studies on BCIs applied to commu-
nication have shown that a minimum of 70% accuracy
is necessary for the system to be usable (K
¨
ubler et al.,
2001). We consider improvements on the 4-class ga-
ming control as one of the primary outlook research
areas for the given decoding context and as a prioriti-
zed extension of the present version of our platform.
We also observed a high variability in perfor-
mance across the two subjects and across different
sessions, verifying that consistency and personali-
zation is an important challenge that needs to be
addressed for practical BCI adoption in clinical
settings.
Data Efficiency Assessment
Our approach builds upon previous work on offline
data-efficient EEG BCI decoding (Ferrante et al.,
2015), where results for 2-class motor-imagery de-
coding using a CSP-based linear system showed an
average accuracy of 88% when trained on just a do-
zen of samples per-class and takes it one step further,
proving satisfying decoding performance for multi-
class motor imagery decoding, as well as suitability
for practical online BCI tasks.
In particular, our system was able to achieve com-
petitive results compared to previous Cybathlon sy-
stems using a number of training samples one order
of magnitude smaller. More precisely, we trained our
classifier using 360 samples, achieving an offline 4-
class mean decoding accuracy across subjects of 49%
on our correlation-corrected cross-validation asses-
sment. When compared against the offline block-wise
cross-validation results from previous Cybathlon sy-
stems on the same task, one of them (Ortega et al.,
2018a) showed a 11% increase in accuracy at the ex-
pense of a 2400% increase in training data volume
and a second one (Schwarz et al., 2016) obtained a
35% accuracy increase at the expense of increasing
training data volume by 242%.
NEUROTECHNIX 2018 - 6th International Congress on Neurotechnology, Electronics and Informatics
30

The main characteristic making our system data-
efficient is that it only needs to optimize a very small
set of model parameters, compared to other appro-
aches using much more complex non-linear models
(Ortega et al., 2018a; Yang et al., 2015; Tabar and
Halici, 2017; Lu et al., 2017). In fact, our classifier
only needs to learn 6 weights and one bias term.
Overall, our system aims to find an optimal trade-
off between accuracy and volume of training data nee-
ded prior to BCI live usage, so as to obtain satisfying
levels on the former, while reducing the latter dras-
tically, effectively shortening the duration of training
sessions. This could potentially lead to an improved
BCI user experience, enabling mainstream adoption
of such systems in the clinical setting.
5 CONCLUSION
In this work we demonstrate how a data-efficient
EEG-based online BCI system can be deployed end-
to-end to compete in the Cybathlon BCI race. The
main advantage of our system compared to others
from previous literature is that it requires a volume
of training data one order of magnitude smaller while
retaining a competitive accuracy, essentially reducing
the amount of time needed for data acquisition prior
to live BCI usage. In addition, we present methods
to troubleshoot an EEG-based BCI system by exa-
mining CSP bipolar plots, pre-CSP and post-CSP fil-
tered trials. We also demonstrate good practices to
avoid over-optimistic offline results by using a block-
wise cross-validation discarding a number of trials be-
tween the training and test blocks, effectively elimina-
ting correlated trials.
The system we implemented was based on tem-
poral filtering using band-pass filtering and spatial fil-
tering using Common Spatial patterns to extract log-
variance features to fit a linear classifier (Logistic Re-
gression). We focused on the identification of senso-
rimotor rhythms associated with motor imageries and
4 different motor imageries were tested (right hand
movement, left hand movement, both feet movement,
and abdominal contraction). Our results showed com-
parable results in offline and online accuracy for 2-
commands control, obtaining superior results on the
online mode than on the offline mode, but a drop
in performance for 3-class online decoding with re-
spect to offline decoding. We were able to improve
3-command online control by using a two-step binary
classification strategy.
We also observed great variability in performance
across subjects and sessions, which suggests that mul-
tiple sessions would be ideally needed to identify
which motor imageries can be best controlled by each
subject, so that training can be focused on those spe-
cific ones. The data-efficient nature of our approach
makes it well suited for fast identification of optimal
motor-imageries per subject. Finally, the Cybathlon
testing task and performance conditions of our sy-
stem align it with contemporary assistive technolo-
gies’ standards and afford it the potential to become
a good benchmark and a promising tool for the ad-
vancement of non-invasive BCI research and applica-
tions.
REFERENCES
Dziemian, S., Abbott, W. W., and Faisal, A. A. (2016).
Gaze-based teleprosthetic enables intuitive continu-
ous control of complex robot arm use: Writing dra-
wing. In 2016 6th IEEE International Conference on
Biomedical Robotics and Biomechatronics (BioRob),
pages 1277–1282.
Fan, R., Chang, K., Hsieh, C., Wang, X., and Lin, C. (2008).
LIBLINEAR: A library for large linear classification.
Journal of Machine Learning Research, 9:1871–1874.
Ferrante, A., Gavriel, C., and Faisal, A. A. (2015). Data-
efficient hand motor imagery decoding in EEG-BCI
by using morlet wavelets and common spatial pattern
algorithms. In 2015 7th International IEEE/EMBS
Conference on Neural Engineering (NER), pages
948–951.
Friedrich, E. V., Scherer, R., and Neuper, C. (2013). Long-
term evaluation of a 4-class imagery-based braincom-
puter interface. Clinical Neurophysiology, 124(5):916
– 927.
Grant, M. C. and Boyd, S. P. (2008). Graph implemen-
tations for nonsmooth convex programs. In Recent
Advances in Learning and Control. Lecture Notes in
Control and Information Sciences, volume 371, pages
95–110, London. Springer.
Grosse-Wentrup, M. and Buss, M. (2008). Multiclass com-
mon spatial patterns and information theoretic feature
extraction. IEEE Transactions on Biomedical Engi-
neering, 55(8):1991–2000.
Holz, E. M., Botrel, L., Kaufmann, T., and K
¨
ubler, A.
(2015). Long-term independent brain-computer inter-
face home use improves quality of life of a patient in
the locked-in state: A case study. Archives of Physical
Medicine and Rehabilitation, 96(3):S16–S26.
Koles, Z. (1991). The quantitative extraction and topo-
graphic mapping of the abnormal components in the
clinical EEG. Electroencephalography and Clinical
Neurophysiology, 79(6):440 – 447.
Kothe, C. A. and Makeig, S. (2013). BCILAB: a platform
for braincomputer interface development. Journal of
Neural Engineering, 10(5):056014.
K
¨
ubler, A., Neumann, N., Kaiser, J., Kotchoubey, B., Hin-
terberger, T., and Birbaumer, N. P. (2001). Brain-
computer communication: Self-regulation of slow
Data-efficient Motor Imagery Decoding in Real-time for the Cybathlon Brain-Computer Interface Race
31

cortical potentials for verbal communication. Ar-
chives of Physical Medicine and Rehabilitation,
82(11):1533–1539.
Lu, N., Li, T., Ren, X., and Miao, H. (2017). A deep le-
arning scheme for motor imagery classification based
on restricted boltzmann machines. IEEE Transacti-
ons on Neural Systems and Rehabilitation Engineer-
ing, 25(6):566–576.
Maimon-Mor, R. O., Fernandez-Quesada, J., Zito, G. A.,
Konnaris, C., Dziemian, S., and Faisal, A. A. (2017).
Towards free 3D end-point control for robotic-assisted
human reaching using binocular eye tracking. In 2017
International Conference on Rehabilitation Robotics
(ICORR), pages 1049–1054.
Makin, T. R., de Vignemont, F., and Faisal, A. A. (2017).
Neurocognitive barriers to the embodiment of techno-
logy. Nature Biomedical Engineering, 1:0014 EP.
Milln, J. R., Renkens, F., Mourio, J., and Gerstner, W.
(2004). Brain-actuated interaction. Artificial Intelli-
gence, 159(1):241 – 259.
M
¨
uller-Putz, G. R., Scherer, R., Brunner, C., Leeb, R., and
Pfurtscheller, G. (2008). Better than random: a closer
look on BCI results. International Journal of Bioelec-
tromagnetism, pages 52–55.
Neuper, C., Wrtz, M., and Pfurtscheller, G. (2006).
ERD/ERS patterns reflecting sensorimotor activation
and deactivation. In Neuper, C. and Klimesch, W.,
editors, Event-Related Dynamics of Brain Oscillati-
ons, volume 159 of Progress in Brain Research, pages
211 – 222. Elsevier.
Noronha, B., Dziemian, S., Zito, G. A., Konnaris, C., and
Faisal, A. A. (2017). Wink to grasp - comparing eye,
voice and EMG gesture control of grasp with soft-
robotic gloves. In 2017 International Conference on
Rehabilitation Robotics (ICORR), pages 1043–1048.
Obermaier, B., Neuper, C., Guger, C., and Pfurtschel-
ler, G. (2001). Information transfer rate in a five-
classes brain-computer interface. IEEE Transactions
on Neural Systems and Rehabilitation Engineering,
9(3):283–288.
Ortega, P., Colas, C., and Faisal, A. A. (2018a). Compact
convolutional neural networks for multi-class, perso-
nalised, closed-loop EEG-BCI. In 2018 IEEE Inter-
national Conference on Biomedical Robotics and Bi-
omechatronics (BioRob), 7th IEEE International Con-
ference (forthcoming).
Ortega, P., Colas, C., and Faisal, A. A. (2018b). Convoluti-
onal neural network, personalised, closed-loop brain-
computer interfaces for multi-way control mode swit-
ching in real-time. bioRxiv.
Ramoser, H., Muller-Gerking, J., and Pfurtscheller, G.
(2000). Optimal spatial filtering of single trial EEG
during imagined hand movement. IEEE Transactions
on Rehabilitation Engineering, 8(4):441–446.
Riener, R. and Seward, L. J. (2014). Cybathlon 2016.
In 2014 IEEE International Conference on Systems,
Man, and Cybernetics (SMC), pages 2792–2794.
Schwarz, A., Steyrl, D., and Mller-Putz, G. R. (2016).
Brain-computer interface adaptation for an end user
to compete in the Cybathlon. In 2016 IEEE Interna-
tional Conference on Systems, Man, and Cybernetics
(SMC), pages 001803–001808.
Tabar, Y. R. and Halici, U. (2017). A novel deep learning
approach for classification of EEG motor imagery sig-
nals. Journal of Neural Engineering, 14(1):016003.
Tomioka, R., Aihara, K., and M
¨
uller, K. (2007). Logis-
tic regression for single trial EEG classification. In
Sch
¨
olkopf, B., Platt, J. C., and Hoffman, T., editors,
Advances in Neural Information Processing Systems
19, pages 1377–1384. MIT Press.
Tostado, P. M., Abbott, W. W., and Faisal, A. A. (2016).
3D gaze cursor: Continuous calibration and end-point
grasp control of robotic actuators. In 2016 IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 3295–3300.
Yang, H., Sakhavi, S., Ang, K. K., and Guan, C. (2015).
On the use of convolutional neural networks and aug-
mented CSP features for multi-class motor imagery
of EEG signals classification. In 2015 37th Annual
International Conference of the IEEE Engineering in
Medicine and Biology Society (EMBC), pages 2620–
2623.
Zhang L., He W., H. C. and Wang, P. (2010). Improving
mental task classification by adding high frequency
band information. Journal of Medical Systems, 34:51
– 60.
NEUROTECHNIX 2018 - 6th International Congress on Neurotechnology, Electronics and Informatics
32
