
Mechanical Optimization Design of Sugarcane Cane Species
Stripping Method
Zhong Hua Shen
1
, Yi Wei Liu
2
and Jing Bo Cong
3
1
School of mechanical and control engineering, Guilin University of Technology
2
School of mechanical and control engineering, Guilin University of Technology
3
School of mechanical and control engineering, Guilin University of Technology
Keywords: Sugarcane cleaner, mechanical optimization, Sensor, MATLAB.
Abstract: The traditional method of harvesting sugarcane has no advantage and is inefficient. Mechanization
harvesting is gradually gaining popularity, which leads to higher utilization rate of sugarcane harvester
machinery. Feedback information based on actual field operation. The need for sugarcane harvester is no
longer the basic requirement of breaking rate and low heterosis rate. It is to keep the sugarcane seedlings
under the premise of keeping the leaves clean, so that they can be planted again in the second year. In this
paper, a linear displacement sensor is added to automatically identify sugarcane sugarcane nodes and avoid
the damage of sugarcane seedlings. Therefore, the rationality of sugarcane peeling is improved, and the
benefit of mechanized harvesting of sugarcane is improved.
1 INTRODUCTION
Guangxi is the largest province of sugarcane
cultivation in China, and the largest sugarcane and
sugar production base in China. It's the most
important sugar area in the country.
Sugarcane is an important production of sucrose
raw material by using stem buds for asexual
reproduction. At present, in the process of sugarcane
stripping, the cane bud of sugarcane is destroyed,
and the planting of sugarcane will be affected, thus
affecting the development of the whole industry. It is
of great significance to study how to avoid the
cutting process of sugarcane peeling, and to realize
the effective planting of sugarcane in the second
year.
According to observation, sugar cane buds are
long in the next to next to sugarcane stem section
and, in the side of the sugar cane kind if use cameras
to collect images may be taken less than sugarcane
shoots and therefore cannot be directly by
identifying sugarcane sprout methods to achieve the
purpose of injury prevention buds. The stems of
sugarcane species have the characteristics of a week
around sugarcane, and can be accurately identified
from any Angle. Therefore, this paper USES the
identification of sugarcane planting stem to
indirectly obtain the position of sugarcane bud to
achieve the accurate identification of the sugarcane
bud, and provides the accurate signal for the study of
the control system.
This paper will use the MATLAB genetic
algorithm and direct search toolbox (GADS), genetic
algorithm and direct search toolbox extends the
ability to deal with optimization problems in
MATLAB, can be used to deal with traditional
optimization technology is difficult to solve the
problem, including those that are difficult to define
or not convenient for mathematical modeling
problem, can also be used to solve the problem of
objective function is relatively complex. In this
paper, MATLAB6.0 is used to solve the optimal
design of sugarcane stripping device.
2 THE RESEARCH STATUS
First, Moshashai of Iran used the method of gray
image threshold segmentation to make a preliminary
study on sugarcane stem node identification.
According to the characteristics of sugarcane
grayscale image, the accuracy rate of the stalk
festival was 88 percent. Lu is equal people introduce
technology of machine vision recognition sugarcane
stem section, the first by the support vector machine
SVM (support vector machine) method of internodes
and internode classification, to identify to identify
the clustering of the internodes class, obtain
internodes number and position of internodes;
Yellow is the person with Matlab as development
platform, this paper proposes a of sugarcane stem
section recognition method, through the gray
processing, Sobel edge detection, combined with the
mathematical morphology of expansion and
corrosion, obtain the edge of the cane internodes
straight line, identification of sugarcane stem section.
Huang Yi Qi, Wang Xiao Bo et al. designed a strain
- resistant strain - based sugarcane plant - resistant
bud system. These research directions have high
accuracy, but the feasibility is not high in actual
production.
Stripping is the key process in the harvesting
process of sugarcane. The quality of foliation
directly affects the harvest quality of sugarcane. At
present, the small leaf-stripping machine is divided
into two types: tail feeding and root feeding. The
stripping element in the rear feeding is mostly made
of nylon brush. As the name implies, sugarcane is
fed from the end of cane, and the cane is torn and
removed under the action of reverse comb of the leaf
brush. The root feeding machine mainly adopts
nylon strip brush or rubber finger stripping element,
and sugarcane is fed by sugarcane root to peel the
leaves. The stripping element of the nylon strip is
used to crack the sugarcane leaves and break the
cane leaves. The Angle of the rubber finger can be
wedged into the sheath, and the friction of the stem
will peel off the leaves. The principle of the whole -
pole cane harvester was basically the same as that of
the root feeding.
At present, most studies have been carried out
from heterogeneity, stem fracture rate, skin injury
rate and the life of the stripping element. In our
country, most of the sugarcane stripping device is
centrifugal impingement, and its mechanism mainly
consists of the input and output roller and the
stripping roller. Stripping leaves components
installed in a certain way on the strip leaf roller,
work, stripping leaves components with high speed
rotation roller impact on sugar cane, extrusion,
friction and tear effect, making the sugarcane leaf
peeling off.
3 DESIGN PRINCIPLE
To strip off leaf element structure size optimization
analysis, first of all to analyze strip leaf element in
the process of work stress: peel leaf element is at
work is to rely on high speed rotating shell leaf
element of sugarcane stalk push, friction, and makes
the sugarcane leaves from. The stripping mechanism
is mainly composed of input roller, output roller,
stripping roller and frame.
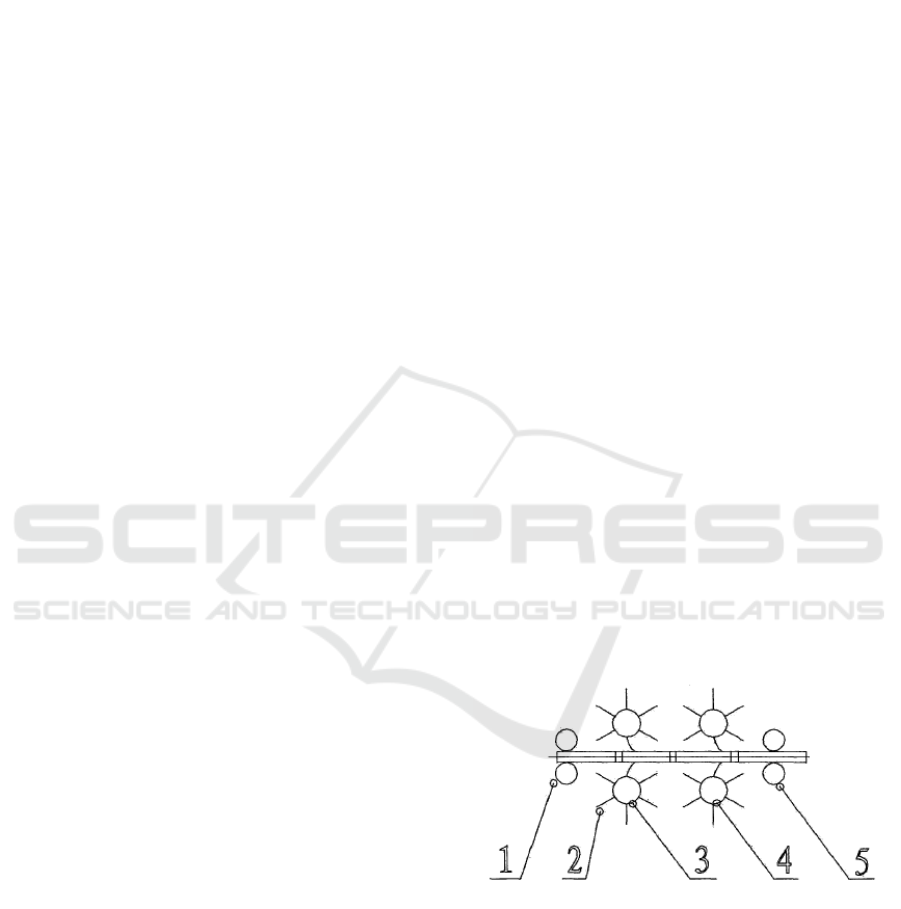
In this paper, design of stripping leaves device is
mainly composed of frame, type roller, 1 strip leaf
roll, 2 strip leaf roller and output roller chain drive
mechanism and motor etc plane diagram is shown in
figure 1. In each part, the upper and lower rollers are
included, and the rotation speed is the same with a
four gear group, and the reverse is reversed.
Generally speaking, it is not enough to have a set of
leaf-stripping roller. In particular, the sugarcane
leaves are more tightly packed. Therefore, we use
two sets of stripping roller, the first and the second
stage stripping roller. The speed is controlled by
three motors respectively. The distance between the
upper and lower input rollers is adjustable, and the
horizontal distance of the roller is adjustable. In
addition, the horizontal distance between the output
roller and the stripping roller can be adjusted.
Feeding roller, stripping roller (including the
first level stripping and second stripping roller) and
the output drum are driven by the driving motor and
driving chain and driving gear. The upper drum of
each drum group can be driven by the floating gear
connecting plate and the floating connecting plate,
and the driving shaft is floating in the circular arc
groove of the side plate. Under the force of rubber
strip, the root of sugarcane is entered into the leaf
roller. The elastic teeth of the stripping element are
in contact with the cane leaves. After stripping, the
sugarcane is output by the output roller.
Fig.1 Schematic diagram of leaf-stripping device.
1. Output roller 2. Stripping element 3. First stage
peeling roller 4. Second stage stripping roller 5. Input
roller.
The device enters the roller to choose rubber
material, and adopts the design method of hanging
rubber on the input roller. The outer cylinder of
rubber material can avoid the situation of damage to
sugar cane in the case of greater pressure and
friction. In order to increase the friction between
rubber drum and cane stem, it is necessary to use
groove design for rubber roller.
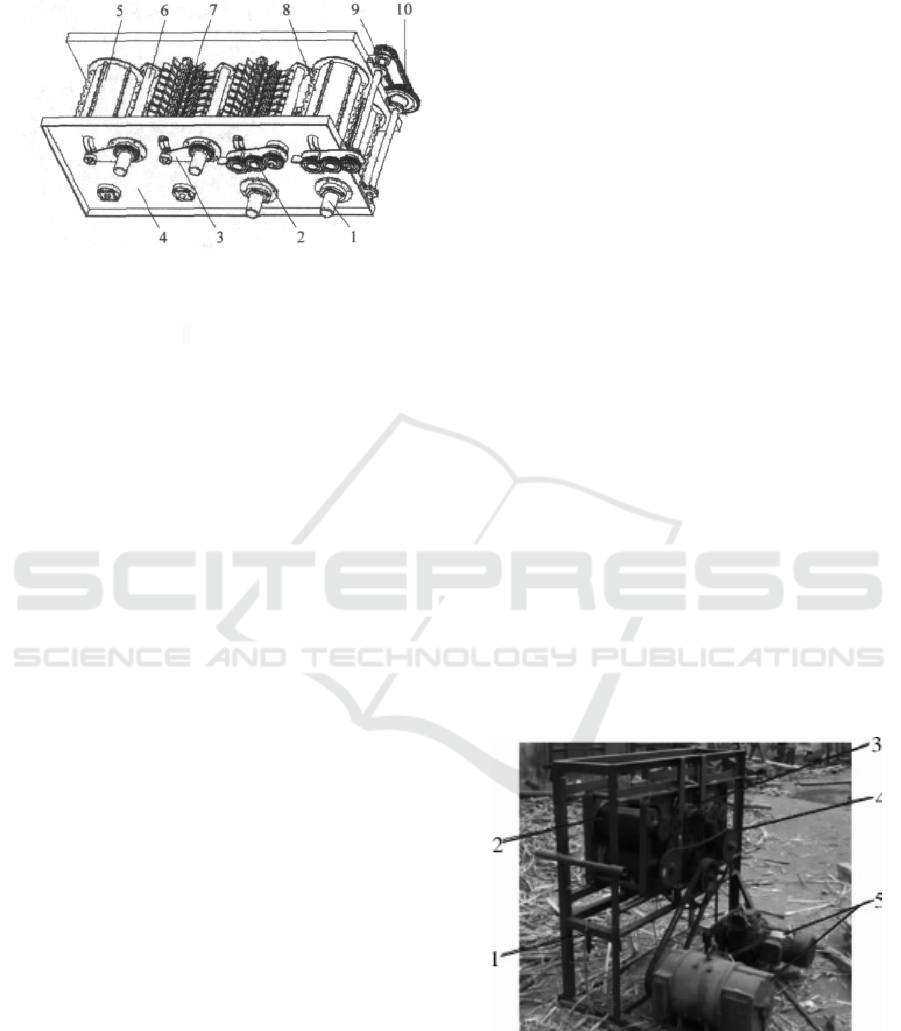
Fig.2 Structure of sugarcane leaf-stripping device.
1. Drive motor 2. Floating gear connecting plate 3.
Floating connection plate 4. Side board 5. Feeding roller
group 6. Drive shaft 7. Stripping roller 8. Output drum
group 9. Transmission chain 10. Transmission gear train.
In order to make sure that the sugarcane leaves
have low heterosis, at the same time it will not harm
sugarcane seedling, especially a sugarcane stalk
recognition device. The core component of this
device is a one-way displacement sensor. The
installation of the sensor shall be connected with a
fixed shaft section. The fixed shaft is fixed on the
base, side support plate and axial support plate. The
sugarcane seedling is usually long on the stem node,
and the one-way displacement sensor is selected
here. In addition, the data acquisition equipment to
be prepared is the data acquisition instrument and
DASP data signal processing software.
The main design principle is that when sugar
cane is introduced into the cane harvester through
the feeding device, if the stripping element is rolled,
it is the cane segment of the stem node, and the
stripping element is normally stripped; When the
sugarcane stalk is pushed through the roller, it is the
sudden increase or decrease of the diameter of the
sugarcane. In order to detect this floating change, a
detection platform can be connected to the stripping
element, which can reflect the compressed motion of
the stripping element to the detection platform. At
this point, the displacement value is measured by
one-way displacement sensor, and the sensor output
signal detects the position of the stem node.
The linear displacement sensor used in this
experiment, also known as linear sensor, is a linear
device belonging to metal induction. The function of
the sensor is to convert the measured physical
quantity into electricity. Generally speaking, it
consists of pull rod, aluminum tube, circuit board,
brush, brush holder, high frequency absorption
circuit, end cover and assembly parts. The working
principle is a sliding rheostat, which is used as a
voltage divider to display the actual position of the
measured position with relative voltage. The pull rod
is connected with the brush equal to the resistance
element for straight back and forth motion. When
the measurement changes, the linear transformation
is carried out between the resistance and the brush
contact. The function of linear displacement sensor
is to convert the mechanical linear displacement into
electrical signal, and the signal can be proportional
to the mechanical movement. The linear
displacement sensor used in this paper is ktr-50, the
power supply voltage is dc 24V, the output signal is
0-10v, the range is 50mm, and the maximum
working speed of the probe is 5m/s. The precision
can reach 0.05% of the range, i.e. 0.0025mm, which
can meet the detection. The data acquisition system
includes charge amplifier, data acquisition card,
processor and display equipment.
4 OPTIMUM DESIGN OF
SUGARCANE PEELING
LEAVES
The stripping element is mounted on the stripping
roller by means of the clamping device. When the
leaf roller is rotating, it is mainly used to peel the
leaves by the fingertip of the stripping element, and
the root is fixed on the leaf roller. In this way, one
end is fixed end, the other end is free, and the free
end is bent. The deformation degree of the stripping
element is large.
Fig.3 The Tester of Sugarcane Detaching machine.

5 MATLAB OPTIMIZATION
ALGORITHM GEOMETRIC
DESCRIPTION
MATLAB optimization technology mainly includes
the following two aspects:
5.1 Mathematical Modelling
Use mathematical methods to describe optimization
problems. Mathematical relations in the model
reflect the goals and constraints to be achieved in the
optimization problem. MATLAB commonly used
mathematical model is:
Error! Reference source not found.
Error! Reference source not found. (linear
equality constraints)
Error! Reference source not found.
(nonlinear inequality constrained)
Error! Reference source not found. (non-
linear equality constraints)
Error! Reference source not found. (The
lower bound and the upper bound of x)
In the formula, x, beq, lb and ub are vectors, A
and Aeq are matrices, c(x) and ceq(x) are functions.
Finally we measure the parameters of peeling
leaves quality for impurity rate (y), y = (remaining
amount of sugarcane leaf/sugarcane total quality
after peeling leaves) x 100%, here with rubber resin
as the shell element, through mathematical statistics
software SPSS regression analysis of data, can get
strip element mathematical model of the impurity
rate
:Error! Reference source not found.Error!
Reference source not found.
Equation above is the regression value of the
heterogeneity of rubber fat stripping element. Where
x1 represents the input roller speed; x2 is the
rotating speed of the stripping roller; The spacing of
the horizontal direction between the input roller and
the stripping roller; X4 is the output roller speed.
5.2 Mathematical Determination
After the mathematical model is built, a reasonable
optimization method is selected to solve the problem.
Due to mechanical optimization design is mostly
nonlinear constraint minimum optimization problem,
the commonly used method is by constructing
penalty function and so on will have a constrained
optimization problem into unconstrained
optimization problems to solve. Here we use the
sequential quadratic programming method (SQP
method) to analyze. The implementation of SQP
method in MATLAB is mainly divided into three
steps:
(1) Update of the Lagrange function Hessian
matrix;
(2) Quadratic programming problem solving;
(3) The calculation of one-dimensional search
and objective functions.
5.3 The Calculation of One-
Dimensional Search and Objective
Functions.
In this paper, using the SQP method to solving
nonlinear constrained optimization problems,
stripping leaves device in MATLAB algorithm, to
solve nonlinear optimization problems is mainly
composed of femion function to achieve, their calls
the format and syntax is as follows: x =
fmincon(fun.X0,A,b,Aeq,beq,lb,ub,nonlcon,options)
Results show that the optimal interval is: input roller
speed range is 150-250 r/min, stripping leaves roller
speed range is 600-900 r/min, stripping leaves roller
speed range is 600-900 r/min, the input is 200-300 -
mm, roller spacing interval output roller speed range
is 280-350 r/min. After the optimization interval was
determined, the regression equation was optimized
by MATLAB, and the optimal value of y3min=0.3%
was obtained. The optimization effect is the best.
REFERENCES
1. Lu Shang Ping, Wen You Xian, Ge Wei. Extraction
and identification of sugarcane stem nodes based on
machine vision [J].
2. Moshashai K, Almasi M, Minaei S, etal. Identification
of sugarcane nodes using image processing and
machine vision technology[J]. International journal of
Agricultural Research, 2008,3(5):357~364.
3. Kong Lin, Zhou De Jian, Chen Yan Hui. Design and
optimization of the stripping mechanism of the new
type of small sugarcane peeling machine [J]
4. Mou Xiang Wei. Study on the dynamic striking force
of elastic teeth on the stalks of sugarcane and the
mechanism of leaf sheath stripping [J].
5. Mou Xiang Wei, QU Ying Gang, Liu Qing Ting, Wu
Hao, Song Jian Ming. Flexible toothed roller cane
stripping device [J]
6. Huang Yi Qi, Qiao Xi, Tang Shu Xi, Luo Zhao Yu,
Zhang Pei Dong. Based on Matlab, the distribution of
sugarcane stem nodes is located in the experiment. [J]

7. Dong Zhen, Shen Dao Yan, Wei Jin, Meng Yan Mei,
Ye Chun Bo. Design and research of sugarcane
planting and sugarcane stalk detection device.
8. Xu Yang, Ye Feng, Peng Yan Kun, Tang Xiu Ying,
Shi Huan Ru, Chen Te Qing. Optimization design of
the strip element of sugarcane combined harvester
based on ANSYS [J]
