
A Fast and Efficient Method for Solving the Multiple Closed Curve
Detection Problem
Una Radoji
ˇ
ci
´
c
a
, Rudolf Scitovski
b
and Kristian Sabo
c
Department of Mathematics, University of Osijek, Trg Ljudevita Gaja 6, 31 000 Osijek, Croatia
Keywords:
Multiple Closed Curve Detection Problem, k-means Algorithm, Globally Optimal Partition, DIRECT.
Abstract:
The paper deals with the multiple closed curve detection problem, i.e. the multiple circle and the multiple
ellipse detection problem are especially considered. Based on data coming from a number of closed curves not
known in advance, it is necessary to recognize these curves. The approach we propose is based on center-based
clustering, which means that the problem is reduced to searching for an optimal partition whose cluster-centers
are the closed curves we searched for. By using a modified well-known k-means algorithm with carefully
chosen initial approximation we shall look for these curves. For detecting the most appropriate number of
clusters (closed curves), we have also proposed a new, specialized index that was significantly better than
other well-known indexes.
1 INTRODUCTION
Let A = {a
i
= (x
i
,y
i
)
T
∈R
2
: i = 1,...,m}, A ⊂∆ :=
[α
1
,β
1
] ×[α
2
,β
2
] be a set of data points coming from
a number of multiple closed curves in the plane not
known in advance that should be reconstructed or de-
tected. Suppose that data coming from a curve are ho-
mogeneously distributed around that curve such that
random errors from normal distribution with expecta-
tion 0 are added to uniformly distributed points on the
curve in the direction of a normal.
The paper is organized as follows. In Section 3
the multiple closed curve detection problem is de-
fined, a modification of the well-known k-means al-
gorithm for such problems is given and two new al-
gorithms are proposed, in which a new index for de-
tecting the most appropriate number of clusters is ap-
plied. In Section 4, we analyze some special cases
and give corresponding illustrative and numerical ex-
amples. Finally, some conclusions are given in Sec-
tion 5.
2 PRELIMINARIES
The method for solving the multiple closed curve de-
tection problem proposed in this paper is based on
a
https://orcid.org/0000-0003-0329-0595
b
https://orcid.org/0000-0002-7386-5991
c
https://orcid.org/0000-0002-1787-3161
center-based clustering; hence we shall outline the
main facts. In addition to using some distance-like
function d : R
n
×R
n
→ R
+
, R
+
= [0,+∞⟩ (see e.g.
(Kogan, 2007; Sabo et al., 2013)), the set A can be
partitioned into k clusters π
1
,...,π
k
with centers
c
j
:= argmin
x ∈conv(A)
∑
a
i
∈π
j
d(x, a
i
), (1)
by solving an appropriate global optimization prob-
lem (
GOP
)
argmin
c∈conv(A)
k
F(c), F(c) =
m
∑
i=1
min
1≤j≤k
d(c
j
,a
i
), (2)
where F : R
kn
→ R
+
is a Lipschitz continuous sym-
metric, but nondifferentiable and nonconvex function.
Problem (2) is well known under the name center-
based clustering problem.
The problem of recognizing some closed curve
and the problem of detecting a partition with the most
appropriate number of clusters with curve-centers can
be observed separately, but these two problems are es-
sentially closely related. The new index, proposed in
our paper, is specialized in such situations and shows
very good results.
Radoji
ˇ
ci
´
c, U., Scitovski, R. and Sabo, K.
A Fast and Efficient Method for Solving the Multiple Closed Curve Detection Problem.
DOI: 10.5220/0007238902690276
In Proceedings of the 8th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2019), pages 269-276
ISBN: 978-989-758-351-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
269

3 THE MULTIPLE CLOSED
CURVE DETECTION
PROBLEM
In our paper, we consider the multiple closed curve
detection problem as a special center-based cluster-
ing problem, where cluster-centers are closed curves
C
j
(p
j
), j = 1,...,k, where p
j
∈ R
n
is a vector of pa-
rameters. This means that the set A will be partitioned
into k ≥ 1 nonempty mutually disjoint clusters whose
centers will be curves C
j
. In what follows, they will
be called C -cluster-centers.
For example, we can consider the multiple cir-
cle detection problem (Akinlar and Topal, 2013; Sc-
itovski and Maro
ˇ
sevi
´
c, 2014), the multiple ellipse
detection problem (Akinlar and Topal, 2013; Grbi
´
c
et al., 2016; Maro
ˇ
sevi
´
c and Scitovski, 2015; Mosh-
taghi et al., 2011), the multiple generalized circle de-
tection problem (Thomas, 2011), etc. For each of
these types of curves, specialized methods have been
developed, which can be seen in the aforementioned
references.
Such problems occur in a number of applica-
tions like pattern recognition, computer vision and
robotics (Akinlar and Topal, 2013; Prasad et al.,
2013), anomaly detection in wireless sensor networks
(Moshtaghi et al., 2011), medical diagnosis (Grbi
´
c
et al., 2016), agriculture etc.
According to (2), the problem of searching for an
optimal k-partition will be defined as the following
GOP
:
argmin
p∈R
kn
F(p), F(p) =
m
∑
i=1
min
1≤j≤k
D(C
j
(p
j
),a
i
), (3)
where p = (p
1
,..., p
k
) and D(C
j
(p
j
),a
i
) is the dis-
tance from the point a
i
∈ A to the curve C
j
. This dis-
tance can be determined numerically (see e.g. (Ute-
shev and Goncharova, 2018)), but for the most com-
monly used curves there are explicit formulas.
Since with an increase in the number of clusters
k in the partition the value of the corresponding ob-
jective function F
k
decreases monotonically (Kogan,
2007; Scitovski and Scitovski, 2013) and since the
number of clusters (the number of curves) k is not
known in advance, we shall search for optimal k-
partitions for k = 1, 2, . . . until the following condi-
tion is met for some small ε
B
> 0 (say .005) (Bagirov,
2008):
F
k−1
−F
k
F
1
< ε
B
. (4)
Among the obtained optimal partition we should
choose the one with the most appropriate number of
clusters. Some modification of standard indexes such
as Davies-Bouldin, Calinski-Harabasz, etc. (see e.g.
(Morales-Esteban et al., 2014)), can be used for this
purpose. By using a special structure of the problem
in Subsection 3.4 we define a new index that is signif-
icantly better. This index will enable us to stop the
procedure of searching for new optimal partitions be-
fore meeting criterion (4).
For solving
GOP
(3) we can use a derivative-
free, deterministic sampling method for global opti-
mization of a Lipschitz continuous function g: D →
R defined on a bound-constrained region D ⊂ R
p
named Dividing Rectangles (
DIRECT
) was proposed
by (Jones et al., 1993). The function g is first trans-
formed into f : [0,1]
p
→ R, and after that, by means
of a standard strategy (see, e.g. (Grbi
´
c et al., 2013;
Gablonsky, 2001; Jones et al., 1993; Jones, 2001;
Paulavi
ˇ
cius and
ˇ
Zilinskas, 2014)), the unit hypercube
[0,1]
p
is divided into smaller hyperrectangles, among
which the so-called potentially optimal ones are first
searched for and then further divided. It should be
noted that this procedure does not assume knowing
the Lipschitz constant L > 0. However, although the
objective function F from (3) is Lipschitz-continuous,
solving
GOP
(3) directly by applying the algorithm
DIRECT
is not acceptable since F is a symmetric func-
tion with n ×k variables in k parameters p
1
,... , p
k
∈
R
n
, which, due to these reasons, has at least k! dif-
ferent points in which it reaches the global minimum.
The
DIRECT
algorithm would search for all of these
points and because of that its efficiency would be very
low.
Therefore for solving
GOP
(3) we propose the
method which can be shortly described in two steps.
First, find a good initial approximation by applying
the
DIRECT
algorithm and after that find an optimal
solution by applying the k-means algorithm modified
for the case of C -cluster-centers.
3.1 Searching for an Initial
Approximation for GOP (3)
An initial approximation for
GOP
(3) will be searched
for such that we consider the problem of search-
ing for an optimal partition whose cluster-centers
are some simple geometrical objects resembling our
closed curves and possibly with a small number of pa-
rameters. By applying a smaller number of iterations
of the
DIRECT
algorithm we can obtain an acceptable
initial approximation for
GOP
(3). In this way, we
will try to at least position well the closed curves we
search for.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
270
3.2 Modification of the k-means
Algorithm for C -cluster-centers
In order to find an optimal k-partition, we shall use the
well-known k-means algorithm modified for the case
of C -cluster-centers. The algorithm can be described
in two steps repeated successively.
Algorithm 1: Modification of the k-means algorithm for C -
cluster-centers (
KMCC
).
Modification of the k-means algorithm for C -cluster-
centers (
KMCC
).
A: For each set of mutually different curves
C
1
(p
1
),. . . , C
k
(p
k
), the data set A should be parti-
tioned into k disjoint nonempty clusters by using
the minimum distance principle
π
j
= {D(C
j
(t
j
),a) ≤ D(C
s
(t
s
),a), ∀s ̸= j} (5)
B: For the given partition Π = {π
1
,... ,π
k
} of the
set A, we should determine the corresponding C -
cluster-centers
ˆ
C
j
( ˆp
j
), j = 1,. . . , k by solving the
following
GOPs
:
ˆ
C
j
( ˆp
j
) ∈ argmin
p∈R
n
∑
a∈π
j
D(C
j
(p),a). (6)
GOP
(6) could be solved by applying the
DIRECT
algo-
rithm, but if we are able to find a good initial approxi-
mation for the curve C
j
as a representant of the cluster
π
j
, then we can apply some local optimization method
(i.e. Nelder-Mead or some Quasi-Newton method).
3.3 A New Algorithm for Searching for
an Optimal k-partition
As already mentioned in Subsection 3.1, a new algo-
rithm for solving
GOP
(3) refers to finding a good ini-
tial approximation, which will be used in the
KMCC
algorithm in order to search for an optimal solution.
Algorithm 2: Searching for an optimal k-partition.
Input: A ⊂ ∆ ⊂ R
2
{Set of data points}; k ≥ 1;
1: Choose a family of some simple curves
˜
C
j
and
find an approximation of
GOP
(3) for them by ap-
plying a few iterations of the
DIRECT
algorithm;
2: Apply the
KMCC
algorithm with the initial approx-
imation from Step 1;
Output: {k,Π
⋆
k
, {C
⋆
1
,... ,C
⋆
k
}, F
⋆
k
}.
3.4 A New Index for Detecting the Most
Appropriate Number of Clusters
Let A ⊂ R
n
be a given set of data points coming
from a number of closed curves not known in ad-
vance. Assume that data coming from a curve are ho-
mogeneously distributed in the neighborhood of that
curve such that random errors from normal distribu-
tion with expectation 0 are added to uniformly dis-
tributed points on the curve in the direction of a nor-
mal. By uniformly distributed points on the curve we
mean points randomly chosen in such a way that the
probability of choosing a point on a particular arc is
proportional to its length. By using the concept from
the DBSCAN algorithm (see e.g. (Ester et al., 1996;
Viswanath and Babu, 2009)), we will try to estimate
the density of points in the neighborhood of the curve.
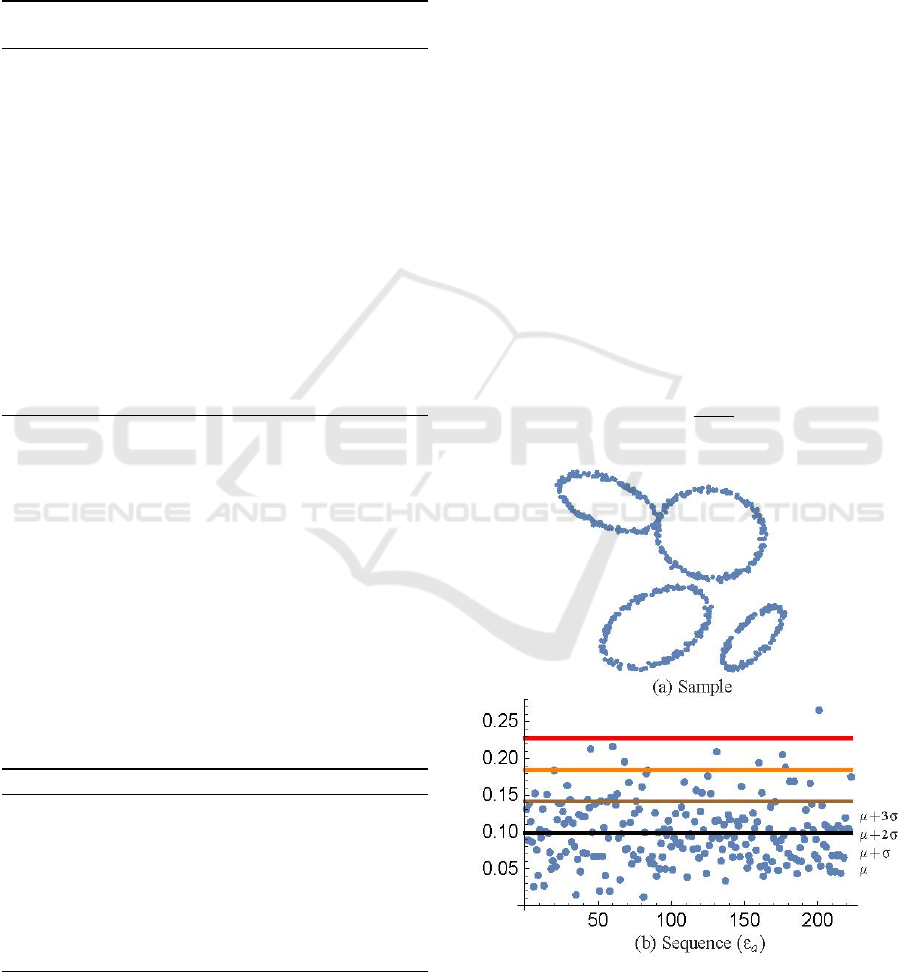
For the given MinPts > 2 (according to (Ester
et al., 1996) we take MinPts = 3) and for every a ∈A
we define the radius ε
a
> 0 of the circle in which
there are MinPts elements of the set A. For the set
R = {ε
a
: a ∈ A} of all these radii, we determine the
mean and the variance, and we define the parameter ε
as:
ε := µ + 3σ,
µ = Mean(R ), σ
2
=
1
|R |−1
∑
a∈B
(ε
a
−µ)
2
. (7)
Figure 1: Determination of the parameter ε.
Example 1. Let us consider the set of data A coming
from 4 ellipses (see Fig. 1a). A sequence (ε
a
) and the
options for choosing the parameter ε are shown in
A Fast and Efficient Method for Solving the Multiple Closed Curve Detection Problem
271
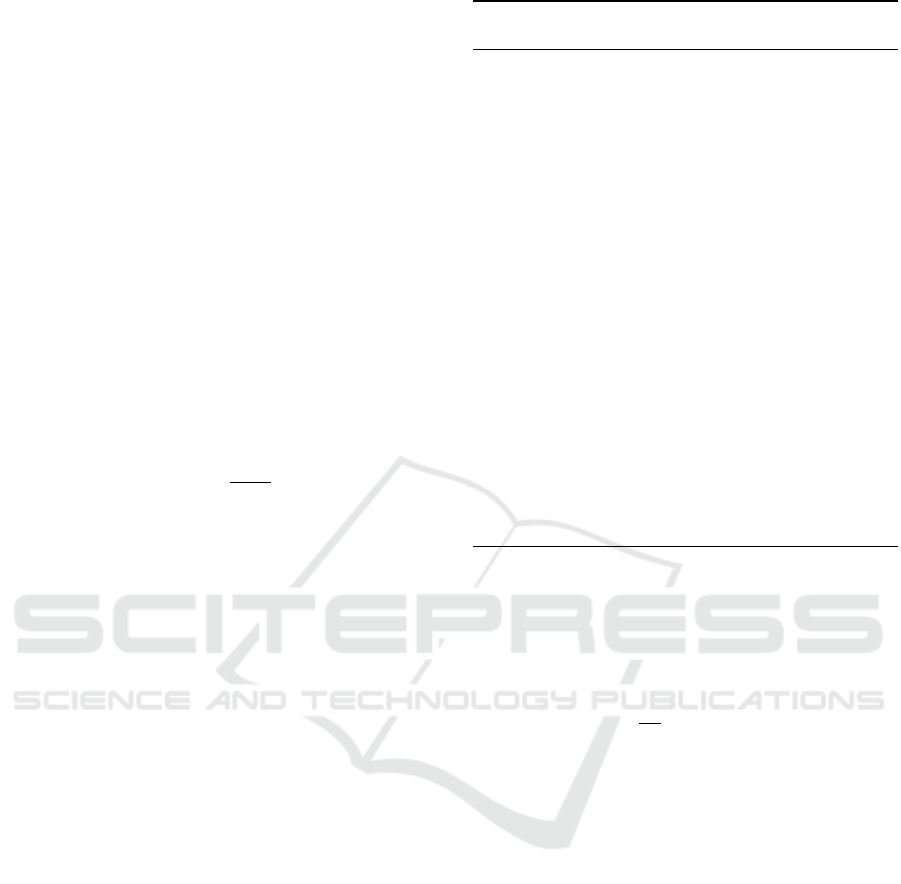
Fig. 1b. We have opted for ε = µ + 3σ because in this
case, for almost all points a ∈ A, the circle C(a,ε)
contains at least MinPts points from A.
Let Π = {π
1
,... ,π
k
} be an optimal k-partition of
the set A, whose cluster-centers are closed curves
C
1
,... ,C
k
and let ε > 0 be the parameter value esti-
mated by (7). For each cluster π
j
, j = 1, . . . , k we
define a set V
j
= {D
1
(C
j
,a): a ∈ π
j
} of orthogonal
distances from the points of the cluster π
j
to the curve
C
j
. Due to the character of the set A, the elements of
the set V
j
come from the folded normal distribution
with the location parameter 0 (see, e.g. (Tsagris et al.,
2014)).
Because of the assumption of homogeneity of data
around the curves searched for if the curve C
j
is well
detected, the absolute deviation of the majority of
points from π
j
to the curve C
j
(i.e. Quantile Abso-
lute Deviation (
QAD
)),
QAD
( j) = µ
j
+ 2σ
j
, (8)
µ
j
= Mean(V
j
), σ
2
j
=
1
|V
j
|−1
∑
v
j
∈V
j
(v
j
−µ
j
)
2
,
should be less than ε.
The new index should depict this property for ev-
ery curve C
j
; thus the new Density Based Clustering
index (
DBC
) is defined by:
DBC
(k) = max
j=1,...,k
QAD
( j). (9)
Note that the
DBC
-index defined in this way describes
a k-partition such that it detects the cluster whose
representant deviates most (in terms of the 95th per-
centile) from data associated to that cluster.
3.5 A New Algorithm for Searching for
an Optimal Partition With the Most
Appropriate Number of Clusters
The concept of the algorithm is as follows. First,
according to (7), for the given set A we define the
parameter ε. After that, in accordance with Algo-
rithm 2, we determine optimal k-partitions and the
corresponding values of the
DBC
-index in line with
(8)-(9) for k = 1,... until the
DBC
(k) value becomes
less than ε or until criterion (4) is met.
If among these k partitions we do not find a glob-
ally optimal one, the
DBC
-index will not be less than
ε, and the algorithm will stop running based upon cri-
terion (4) in the k-th step.
Algorithm 3 : Searching for an optimal partition with the
most appropriate number of clusters.
Input: A ⊂ ∆ ⊂ R
2
{Set of data points }; ε
B
> 0
{According to (Bagirov, 2008)};
1: Determine parameter ε > 0 according to (7);
2: Set k = 1 and call Algorithm 2; Determine Π
k
,
C
k
, F
1
,
QAD
, and
DBC
;
3: if
DBC
< ε, then
4: GO TO Output;
5: end if
6: while
Set k = k +1 and call Algorithm 2; Determine Π
k
,
C
1
,... ,C
k
, F
2
,
QAD
, and
DBC
;
DBC
> ε & (F
1
−F
2
)/F
1
> ε
B
do
7: Set F
1
= F
2
;
8: end while
9: if
DBC
< ε, then
10: k curves C
1
,... ,C
k
detected;
11: else
12: Investigate especially cases when
QAD
( j) <
ε;
13: end if
Output: {k,Closed curves detected}.
Remark 1. If DBC > ε occurs at the end of
Algorithm 3, then all components of the vector
(QAD(1),. . . , QAD(k)) should be checked up. For ev-
ery s ∈{1,...,k}, for which QAD(s) < ε, there is hope
that the s-th curve has been detected, which can be
additionally checked up based upon the density of
data by curves ρ
s
=
|π
s
|
|C
s
|
, s = 1,...,k.
4 SOME SPECIAL CURVES
Some closed curves will be analyzed that most fre-
quently occur in the literature and that have significant
applications in different areas.
4.1 Multiple Circle Detection Problem
Let A ⊂ ∆ ⊂R
2
be a set of data points coming from a
number of multiple circles in the plane not known in
advance.
When searching for an optimal k-partition (see
Subsection 3.3) we will use the algebraic distance
D(C (S, r),a) from the point a ∈A to the circle C with
the center S and the radius r, and when defining the set
V
j
by the
DBC
-index (see Subsection 3.4) we will use
the Least Absolute Distance (LAD) D
1
(C (S, r),a):
D
1
(C (S, r),a) = |∥S −a∥−r| (10)
D(C (S, r),a) = (∥S −a∥
2
−r
2
)
2
(11)
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
272
Now
GOP
(3) can be written in the following way:
argmin
S∈∆
k
,r∈[0,R]
k
m
∑
i=1
min
1≤j≤k
D(C
j
(S
j
,r
j
),a
i
). (12)
Example 2. Let A be the set of data points coming
from k circles C
1
,... ,C
k
homogeneously distributed
in the neighborhood of the circles. Four selected ex-
amples with k = 2,3,4,5 circles are shown in Fig. 2.
3 4 5 6 7 8 9
4
5
6
7
8
9
10
(a) k = 2
2 4 6 8 10
2
4
6
8
10
(b) k = 3
4 6 8 10
2
4
6
8
10
(c) k = 4
2 4 6 8 10
2
4
6
8
10
(d) k = 5
Figure 2: Four selected examples with k = 2,3,4,5 cir-
cles.
Let us consider a data point set A shown in
Fig. 2c. According to Algorithm 2, by using the
DIRECT
algorithm, we first determine an initial ap-
proximation (unit circles shown in Fig. 3a), and after
that, by using the KMCC algorithm, we obtain the so-
lution (Fig. 3b)).
4 6 8 10
2
4
6
8
10
(a) Initial approximation
2 4 6 8 10
0
2
4
6
8
10
(b) Solution
Figure 3: Implementation of Algorithm 2 for circles.
Searching for an optimal partition with the most
appropriate number of clusters will be illustrated by
using the same example. Algorithm 3 terminates when
the value of the DBC-index drops below the estimated
value of the parameter ε = 0.227 defined by (7).
We obtained DBC(1) = 1.93, DBC(2) = 1.07,
DBC(3) = 0.47, and DBC(4) = 0.17. This means that
the 4-partition is an optimal partition and all circles
have been recognized.
Example 3. The method for solving the multiple
circle detection problem given in Algorithm 3 will
be tested on 100 sets of data points generated as
in Example 2. Whether some circle is recognized
among calculated circles will be established by QAD-
index or by the Hausdorff distance between these
circles. As can be seen in Table 1, Algorithm 3
recognizes very well circles the set of data points
A was generated from and necessary
CPU
-time is
reasonably low. All evaluations were done on the
basis of our own Mathematica-modules, and were per-
formed on the computer with a 2.90 GHz Intel(R)
Core(TM)i7-75000 CPU with 16GB of RAM.
Table 1: Result analysis for circles.
No. Circles detected
CPU
-time
circ.
2 3 4 5 6
DIRECT
k-means Total
2 19 0 0 0 0 0.147 1.175 1.322
3 0 20 2 0 0 2.339 4.858 7.197
4 0 0 31 0 0 2.563 7.967 10.53
5 1 0 0 26 1 28.60 18.25 46.85
4.2 Multiple Ellipse Detection Problem
Let A ⊂ ∆ ⊂ R
2
be a set of data points coming from
a number of multiple ellipses in the plane not known
in advance.
An ellipse E can be interpreted as a Mahalanobis
circle (M-circle) M(S,r; Σ) with the center at the
point S ∈ R
2
, the radius r and the covariance matrix
Σ,
M(S,r;Σ) = {u ∈ R
2
: d
M
(S,u; Σ) = r
2
}, (13)
where d
M
: R
2
× R
2
→ R
+
is the Mahalanobis
distance-like function given by
d
M
(S,u; Σ) =
√
detΣ(S −u)
T
Σ
−1
(S −u)
= ∥u −v∥
2
Σ
. (14)
When searching for an optimal k-partition (see
Subsection 3.3) we will use the algebraic distance
D(M(S,r,Σ),a) from the point a ∈ A to the M-circle
M, and when defining the set V
j
by the
DBC
-index
(see Subsection 3.4) we will use the LAD-distance
D
1
(M(S,r,Σ),a) (see e.g. (Grbi
´
c et al., 2016)):
D
1
(M(S,r,Σ),a) = |∥S −a∥
Σ
−r| (15)
D(M(S,r,Σ),a) = (∥S −a∥
2
Σ
−r
2
)
2
(16)
A Fast and Efficient Method for Solving the Multiple Closed Curve Detection Problem
273
Now
GOP
(3) can be written as:
argmin
S∈∆
k
,r∈[0,R]
k
Σ∈M
k
2
m
∑
i=1
min
1≤j≤k
D(M
j
(S
j
,r
j
,Σ
j
),a
i
) (17)
where M
2
is the set of positive definite symmetric ma-
trices of order two.
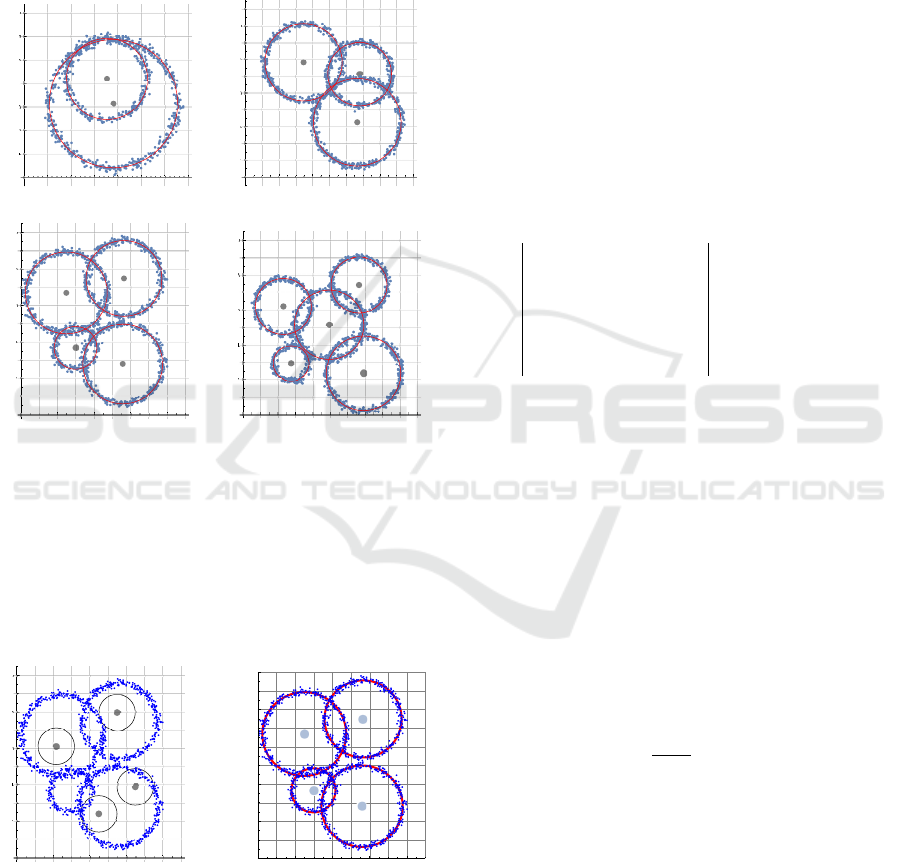
Example 4. Let A be the set of data points coming
from k ellipses E
1
,... ,E
k
homogeneously distributed
in the neighborhood of the ellipses. Four selected ex-
amples with k = 2,3,4,5 circles are shown in Fig. 4.
1 2 3 4 5 6
2
4
6
8
10
(a) k = 2
2 4 6 8 10
2
4
6
8
(b) k = 3
2 4 6 8
2
4
6
8
(c) k = 4
2 4 6 8 10
2
4
6
8
10
(d) k = 5
Figure 4: Four selected examples with k = 2, 3, 4, 5 el-
lipses.
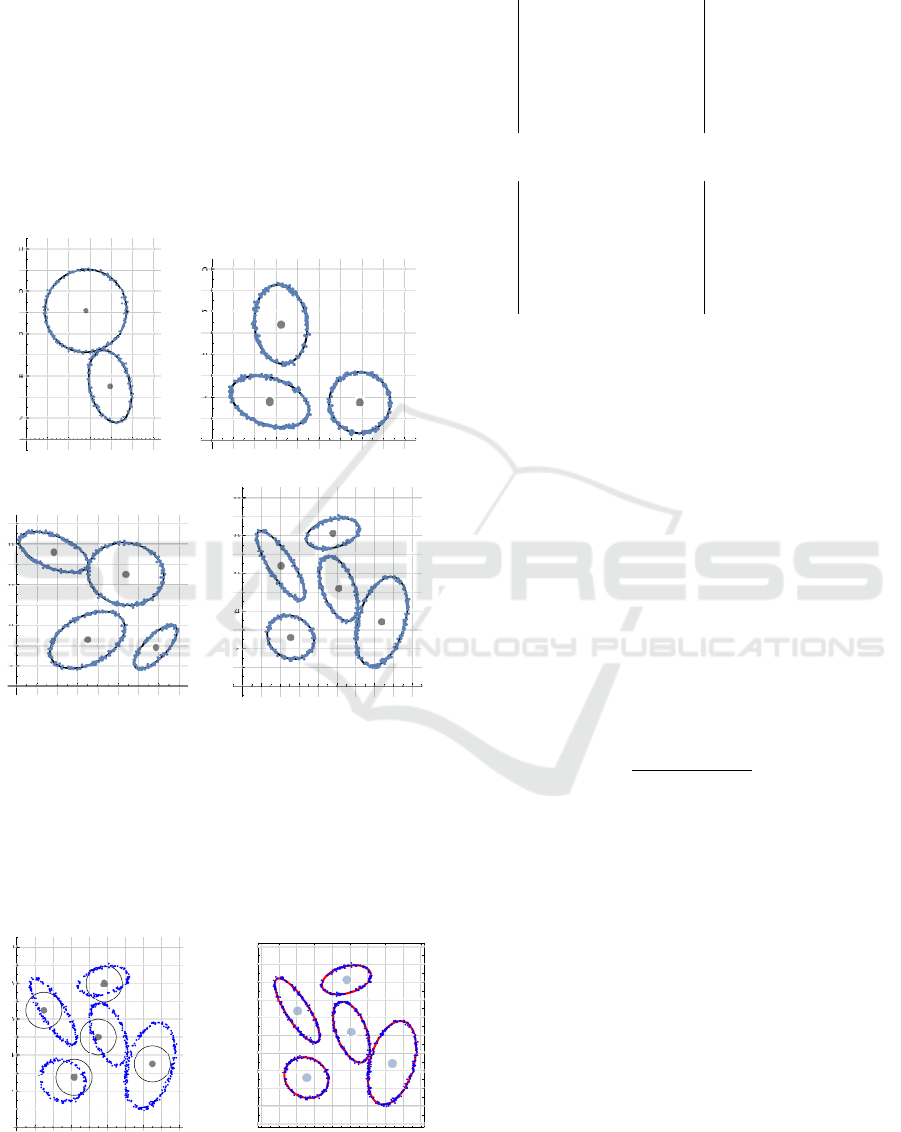
Let us consider a data point set A shown in
Fig. 4d. According to Algorithm 2, by using the
DIRECT
algorithm, we first determine an initial ap-
proximation (unit circles shown in Fig. 5a), and after
that, by using the KMCC algorithm, we obtain the so-
lution (Fig. 5b).
2 4 6 8 10
2
4
6
8
10
(a) Initial approximation
2 4 6 8 10
0
2
4
6
8
10
(b) Solution
Figure 5: Implementation of Algorithm 2 for ellipses.
Table 2: Result analysis for ellipses that mostly do not
intersect.
No. Ellipses detected
CPU
-time
ell
1 2 3 4 5
DIRECT
k-means Total
2 0 20 0 0 0 0.093 1.258 1.351
3 0 0 25 0 0 0.262 3.319 3.580
4 2 0 0 23 2 1.141 8.776 9.917
5 0 1 0 0 27 4.916 19.11 24.03
Table 3: Result analysis for intersecting ellipses.
No. Ellipses detected
CPU
-time
ell. 1 2 3 4 5
DIRECT
k-means Total
2 0 20 0 0 0 0.093 2.270 2.363
3 0 1 24 0 0 0.319 4.766 5.086
4 1 3 0 22 1 3.337 15.55 18.89
5 0 2 5 1 20 15.36 31.24 46.60
Searching for an optimal partition with the most
appropriate number of clusters will be illustrated
by using the same example (see Fig. 4d). The esti-
mated value of parameter (7) is ε = .235, and Algo-
rithm 3 terminates when the value of the DBC-index
drops below that value. We obtained DBC(1) = 2.72,
DBC(2) = 1.70, DBC(3) = 1.46, DBC(4) = 1.22, and
DBC(5) = 0.19. This means that the 5-partition is
an optimal partition and all ellipses have been rec-
ognized.
Example 5. The method for solving the multiple el-
lipse detection problem given in Algorithm 3 will be
tested on 100 sets of data points generated as in Ex-
ample 4. Whether some ellipse, interpreted as an M-
circle M(S,r,Σ), is recognized among calculated M-
circles as an M-circle N(
ˆ
S, ˆr,
ˆ
Σ) will be established
by QAD-index or by calculating the distance (Grbi
´
c
et al., 2016):
D(N,M) =
√
d
M
(
ˆ
S,S,
ˆ
Σ +Σ) + |ˆr −r|. (18)
As can be seen in Table 2, Algorithm 3 recognizes very
well ellipses the set of data points A was generated
from as in Example 4 and necessary
CPU
-time is very
low.
Example 6. Similarly to Example 5, Algorithm 3 will
be tested on 100 sets of data points generated from
2,3,4 or 5 intersected ellipses. Four different exam-
ples can be seen in Fig. 6
As can be seen in Table 3, Algorithm 3 still recognizes
well ellipses and
CPU
-time increases a little bit in the
case of many ellipses.
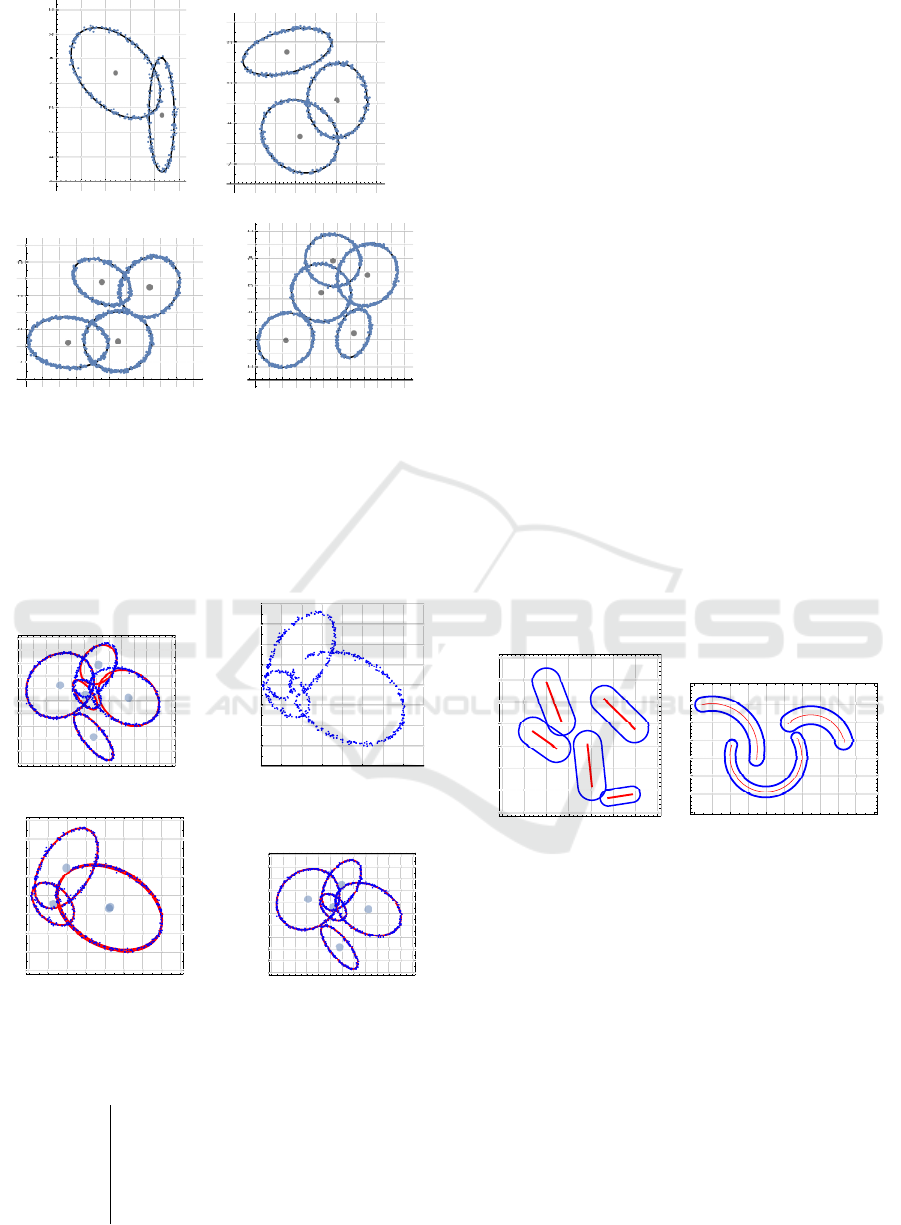
Example 7. Another advantage of the DBC-index will
be illustrated by an example in which a globally op-
timal partition has not been found (see Fig. 7a). The
estimated value of the parameter ε is ε = 0.217, and
the algorithm terminates when condition (4) is met,
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
274
4 5 6 7 8
4
5
6
7
8
9
10
(a) k = 2
1 2 3 4 5 6 7
2
4
6
8
(b) k = 3
0 2 4 6 8
2
4
6
8
(c) k = 4
2 4 6 8 10
0
2
4
6
8
10
(d) k = 5
Figure 6: Four selected examples with k = 2, 3, 4, 5 in-
tersected ellipses.
with ε
B
= 0.005. The 5-partition that was found is
not globally optimal, and characteristics of its clus-
ters are given in Table 4: centers of ellipse-centers,
values of the parameter QAD and densities of points
around ellipses according to Remark 1.
0 2 4 6 8 10
2
4
6
8
10
(a) 5-optimal partition
4 6 8 10
4
6
8
10
(b) Set A \(π
1
∪π
4
)
4 6 8 10
4
6
8
10
(c) 3-opt. part.
0 2 4 6 8 10
2
4
6
8
10
(d) Final Solution
Figure 7: An example of data for which Algorithm 3
has not found any globally optimal partition.
Table 4: Characteristics of calculated ellipses.
j S
j
QAD
( j) ρ
j
1
(2.12,7.23) 0.134 20.6
2 (7.57,6.24) 0.198 17.5
3
(
5
.
17
,
8
.
89
)
0.618 24.9
4 (4.78,3.14) 0.133 19.9
5 (4.11,6.48) 0.471 30.2
It can be stated that ellipses E
1
,E
2
,E
4
have been rec-
ognized among original ellipses since the correspond-
ing values of the parameter QAD are less than 0.217,
where we should carefully take into account ellipse
E
2
since the density of points ρ
2
significantly deviates
from the average density
¯
ρ = |A|/
5
∑
j=1
|E
j
| = 21.5 .
On the basis of this brief analysis, we can leave
out clusters π
1
,π
4
from the set A and reconsider a
simple multiple ellipse detection problem for the set
A \(π
1
∪π
4
) (see Fig. 7b). We obtain the remaining
three ellipses (see Fig. 7c). By applying the KMCC
algorithm to the whole set A, the initial approxima-
tion obtained in this way yields the Final Solution (see
Fig. 7d).
4.3 Some Other Possibilities
Some other similar problems can be treated in the
same way. For example, we can observe a mul-
tiple generalized circle detection problem, where a
generalized circle implies a set C (O(p),r) = {u ∈
R
2
: D(O(p),u) = r, r > 0, p ∈ R
n
}, where O(p) is
some simple geometrical object.
For example, O(p) can be a line segment seg(µ,ν)
ending in points µ,ν ∈ ∆ (see Fig. 8a), or an arc
arc(C,t
1
,t
2
) of a circle, where C is the center of a cir-
cle, and t
1
,t
2
∈ [0,2π], t
1
< t
2
(see Fig. 8b).
1 2 3 4 5 6 7 8
2
3
4
5
6
7
8
9
(a)
0 2 4 6 8 10
0
1
2
3
4
5
6
7
(b)
Figure 8: Generalized circles.
After defining the distance from the point a ∈ A
to the generalized circle C ,
D(C (O(p),r),a) = (D(O(p),a)
2
−r
2
)
2
, (19)
where D is the distance from the point a ∈ A to geo-
metrical objects O(p), then
GOP
(3) becomes
argmin
p∈R
nk
,r∈[0,R]
k
m
∑
i=1
min
1≤j≤k
D(C
j
(O
j
(p
j
),r
j
),a
i
). (20)
5 CONCLUSIONS
The proposed method for solving the multiple closed
curve detection problem has been shown to be very
efficient in special cases of multiple circle and multi-
ple ellipse detection problems.
A Fast and Efficient Method for Solving the Multiple Closed Curve Detection Problem
275

Let us also mention that in the literature there are
some other possibilites such as path-based clustering
approach (see (Fischer and Buhmann, 2003)) that can
also be used for solving multiple closed curve detec-
tion problem.
The proposed
DBC
-index for detecting the most ap-
propriate number of clusters (closed curves) enables
this procedure to be carried out as fast as possible.
In more complex cases of intersecting closed curves,
i.e. when Algorithm 3 does not give a globally opti-
mal partition, construction of the
DBC
-index enables
the detection of some closed curves and the algorithm
to be run on a constrained data set.
The proposed DBC-index should be further inves-
tigated and corrected. We will try to apply the pro-
posed method to other curves. In the meantime, we
successfully applied the method to multiple gener-
alised circle detection problem with application in Es-
cherichia Coli and Enterobacter-cloaca recognizing.
The proposed algorithm could also be applied to
real-world images.
ACKNOWLEDGEMENTS
The author would like to thank Mrs. Katarina Mor
ˇ
zan
for significantly improving the use of English in
the paper. This work was supported by the Croa-
tian Science Foundation through research grants
IP-2016-06-6545
and
IP-2016-06-8350
.
REFERENCES
Akinlar, C. and Topal, C. (2013). Edcircles: A real-time
circle detector with a false detection control. Pattern
Recognition, 46:725–740.
Bagirov, A. M. (2008). Modified global k-means algo-
rithm for minimum sum-of-squares clustering prob-
lems. Pattern Recognition, 41:3192–3199.
Ester, M., Kriegel, H., and Sander, J. (1996). A density-
based algorithm for discovering clusters in large spa-
tial databases with noise. In 2nd International Con-
ference on Knowledge Discovery and Data Mining
(KDD-96), pages 226–231, Portland.
Fischer, B. and Buhmann, J. M. (2003). Path-based clus-
tering for grouping of smooth curves and texture seg-
mentation. IEEE Transaction on Pattern Analysis and
Machine Intelligence, 25:1–6.
Gablonsky, J. M. (2001). Direct version 2.0. Technical
report, Center for Research in Scientific Computation.
North Carolina State University.
Grbi
´
c, R., Grahovac, D., and Scitovski, R. (2016). A
method for solving the multiple ellipses detection
problem. Pattern Recognition, 60:824–834.
Grbi
´
c, R., Nyarko, E. K., and Scitovski, R. (2013). A modi-
fication of the DIRECT method for Lipschitz global
optimization for a symmetric function. Journal of
Global Optimization, 57:1193–1212.
Jones, D. R. (2001). The direct global optimization algo-
rithm. In Floudas, C. A. and Pardalos, P. M., edi-
tors, The Encyclopedia of Optimization, pages 431–
440. Kluwer Academic Publishers, Dordrect.
Jones, D. R., Perttunen, C. D., and Stuckman, B. E. (1993).
Lipschitzian optimization without the Lipschitz con-
stant. Journal of Optimization Theory and Applica-
tions, 79:157–181.
Kogan, J. (2007). Introduction to Clustering Large and
High-dimensional Data. Cambridge University Press,
New York.
Maro
ˇ
sevi
´
c, T. and Scitovski, R. (2015). Multiple ellipse fit-
ting by center-based clustering. Croatian Operational
Research Review, 6:43–53.
Morales-Esteban, A., Mart
´
ınez-
´
Alvarez, F., Scitovski, S.,
and Scitovski, R. (2014). A fast partitioning algorithm
using adaptive Mahalanobis clustering with applica-
tion to seismic zoning. Computers & Geosciences,
73:132–141.
Moshtaghi, M., Havens, T. C., Bezdek, J. C., Park,
L., Leckie, C., Rajasegarar, S., Keller, J. M., and
Palaniswami, M. (2011). Clustering ellipses for
anomaly detection. Pattern Recognition, 44:55–69.
Paulavi
ˇ
cius, R. and
ˇ
Zilinskas, J. (2014). Simplicial Global
Optimization. Springer.
Prasad, D. K., Leung, M. K. H., and Quek, C. (2013). Ellifit:
An unconstrained, non-iterative, least squares based
geometric ellipse fitting method. Pattern Recognition,
46:1449–1465.
Sabo, K., Scitovski, R., and Vazler, I. (2013). One-
dimensional center-based l
1
-clustering method. Op-
timization Letters, 7:5–22.
Scitovski, R. and Maro
ˇ
sevi
´
c, T. (2014). Multiple circle
detection based on center-based clustering. Pattern
Recognition Letters, 52:9–16.
Scitovski, R. and Scitovski, S. (2013). A fast partitioning
algorithm and its application to earthquake investiga-
tion.
Computers & Geosciences
, 59:124–131.
Thomas, J. C. R. (2011). A new clustering algorithm based
on k-means using a line segment as prototype. In Mar-
tin, C. S. and Kim, S.-W., editors, Progress in Pattern
Recognition, Image Analysis, Computer Vision, and
Applications, pages 638–645. Springer Berlin Heidel-
berg.
Tsagris, M., Beneki, C., and Hassani, H. (2014). On the
folded normal distribution. Mathematics, 2:12–28.
Uteshev, A. Y. and Goncharova, M. V. (2018). Point-to-
ellipse and point-to-ellipsoid distance equation analy-
sis. Journal of Computational and Applied Mathemat-
ics, 328:232–251.
Viswanath, P. and Babu, V. S. (2009). Rough-DBSCAN: a
fast hybrid density based clustering method for large
data sets. Pattern Recognition Letters, 30:1477–1488.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
276
