
Software Product Line Engineering for Safety-critical Systems
Philipp Lohm
¨
uller and Bernhard Bauer
Institute of Computer Science, University of Augsburg, Universit
¨
atsstr. 6a, 86159 Augsburg, Germany
Keywords:
Software Product Line, Safety-critical Systems, Complexity Reduction, Dependability, Multi-concerns.
Abstract:
Nowadays, modern cars can be configured by means of a wide range of software configuration options. In this
context, we speak about Software Product Lines (SPLs). In almost every modern automotive vehicle safety-
critical components like, e.g., an Adaptive Cruise Control (ACC) are installed. Some SPLs have different
safety-critical requirements whereas other SPLs have similar requirements. This paper proposes an approach
for the reduction of the complexity of SPLs without loss of safety (aspects) for all participants. For this pur-
pose, a concept has been developed, which clusters products of SPLs with similar safety-critical requirements,
i.e., the set of products of an SPLs, which must still be tested, can be reduced immensely. The paper also
provides an application example how the reduced set can be used in order to perform a Safety, Security and
Timing (SST) based trade-off analysis.
1 INTRODUCTION
In the past few years, safety and security is play-
ing an increasingly important role in various domains
like, the automotive domain. Neglecting safety and
security issues may have fatal consequences. Look-
ing back at the end of the 1960s, the Ford Motor
Company had the objective to develop a fuel-efficient
and cost-effective car, which should be introduced
onto the market at the beginning of the 1970s. Due
to the short time frame, safety checks were skipped
and the resulting damages were much higher than
the supposed cost savings (Ord
´
o
˜
nez et al., 2009). In
order to avoid such problems, corresponding coun-
teractive measures were introduced. However, in-
dividual safety and security issues or counteractive
measures can exclude each other. In this regard, it
is necessary to determine the best trade-off. This
approach has already been presented in (Lohm
¨
uller
et al., 2018). Moreover, modern vehicles can be con-
figured by means of a construction kit. In this context,
there are several millions of configuration sets for the
configuration of a new car. Each configuration set
complies with a product of an SPL and thus different
characteristics. SPLs have advantages and disadvan-
tages: An advantage of an SPL is variability manage-
ment (Buchmann and Greiner, 2018) and that you can
configure an automotive vehicle individually. (Pohl
et al., 2005) However, in theory each configuration
set is accompanied with immense hazards with re-
spect to safety and security issues, thus it is necessary
to check each configuration/product with respect to
its safety and security. Therefore this paper presents
an approach how to reduce complexity of SPLs taken
safety, security and timing issues into account. This
is achieved by eliminating non safety-critical issues as
well as building equivalence classes on semantically
equivalent elements from the SPL and thus to narrow
the number of configuration sets.
First, Sec. 2 gives an overview over the necessary
basics. In the following section a case study is in-
troduced in order to exemplify the approach of this
paper. The approach dealing with the reduction of
SPLs complexity is presented in Sec. 4. The evalua-
tion proves that the approach is a coherent and versa-
tile concept. Sec. 6 points out the novelty of the ap-
proach and its relation to existing work. Finally, the
paper summarizes the results of this paper and gives
an outlook for future work.
2 BASICS
Since this paper aims at safety-critical systems we
will have a closer look on the necessary theoreti-
cal foundations. Both, safety and security must be
avoided preventively, not to endanger human life. In
general, safety means accident prevention whereas se-
curity means crime prevention. However, security
failures can lead to safety issues, e.g. a hacked autopi-
lot. As already mentioned in Sec. 1 safety and secu-
Lohmüller, P. and Bauer, B.
Software Product Line Engineering for Safety-critical Systems.
DOI: 10.5220/0007246102090216
In Proceedings of the 7th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2019), pages 209-216
ISBN: 978-989-758-358-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
209
rity aspects are often contradictory. On the one side,
safety ensures that human life and environment is pro-
tected against potentially hazardous machines. On
the other side, security makes sure that human beings
cripple the machinery. (Springer, 2016) Let’s take
an example from the automotive environment: Mod-
ern vehicles are equipped with one or more airbags
in order to preserve human life (safety). Moreover,
it must be assured that the functionality of an airbag
can not be triggered remotely by third parties (secu-
rity). In order to protect releasing the airbag, other
measures are necessary, like, e.g., a secure encryption
algorithm. However, if the encryption takes to much
time, this can cause new problems, e.g., delayed trig-
gering (timing) of an airbag which endangers human
life and thus safety. As it can seen, safety, security
and timing may be mutually exclusive.
For this purpose, (Lohm
¨
uller et al., 2018) devel-
oped an approach how to calculate an optimal preven-
tative trade-off between (partly) conflicting (multi-)
concerns including safety, security as well as timing.
A quick view on the approach delivers the following:
1. Devise potential alternative solutions, i.e., indi-
vidual decision options by which the trade-off is
calculated.
2. Identify failure modes and transfer it into a struc-
tured Safety Goal Hierarchy Model (SGHM) as
described in (Lohm
¨
uller et al., 2018). The top-
level goal represents a safety goal since it is the
main objective to obtain a system, which is ac-
ceptably safe. The leaves represent the Single
Point of Failures (SPOFs), which are essential for
the next step.
3. Perform a Failure Mode and Effects Analysis
(FMEA) for all SPOFs.
4. Perform a Multi-Criteria Decision Analysis
(MCDA) to calculate the optimal trade-off.
As already indicated in Sec. 1, SPLs enable many
ways of configurations, e.g., configurations of a car.
Since there are different definitions of an SPL, a con-
figuration set or configuration option is meant in this
paper, when speaking about SPLs in this paper. Usu-
ally, the different features of SPLs are modeled by
a Feature Model (FM). FMs, which have been first
introduced in the Feature-Oriented Domain Analy-
sis (FODA) (Kang et al., 1990) contain all neces-
sary features, i.e., all configuration options. Thereby,
an FM is modeled and structured hierarchically. For
each (sub-)feature there are several characteristics:
{abstract, concrete}, {mandatory, optional}, {or,
xor} and {requires, excludes}. With exception of the
latter tuple, one characteristic of each tuple must be
selected for each (sub-)feature. A detailed descrip-
tion of the individual characteristics can be found in
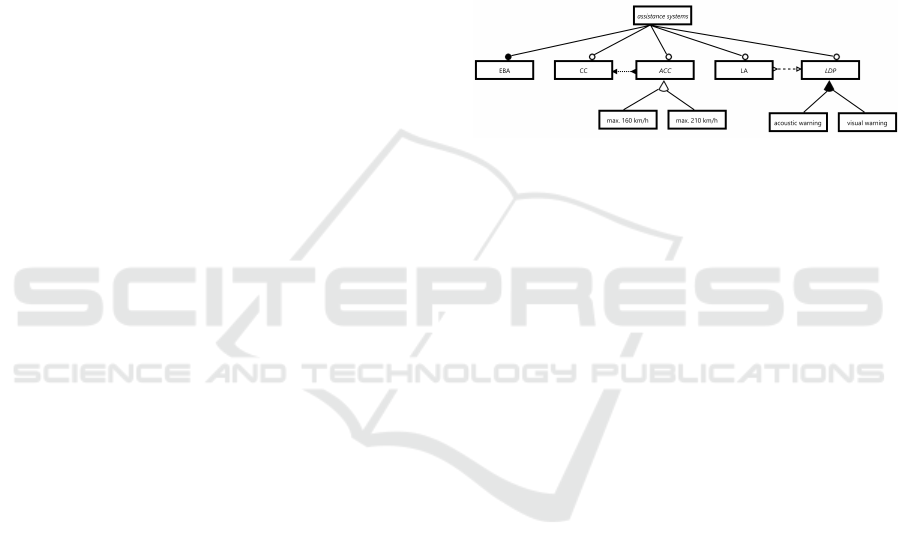
(Lee et al., 2002). Fig. 1 shows an exemplary FM
for configuring assistance systems (legend: abstract
feature, concrete feature). Thereby, you can choose
between five assistance systems whereas Emergency
Brake Assist (EBA) is mandatory. If an ACC is con-
figured, the Cruise Control (CC) may not be selected.
The ACC provides two options: either with a maxi-
mum speed of 160 km/h or 210 km/h. Furthermore,
if the Lane Assist (LA) is selected, the Lane Depar-
ture Prevention (LDP) must be selected as well. The
LDP provides two options of which at least one must
be selected: an acoustic and visual warning.
Figure 1: Exemplary FM.
3 CASE STUDY
In this section, a case study is presented to show the
approach of the paper, which will be elaborated in
the next section. Modern automotive vehicles are
equipped with assistance systems, like an ACC or a
LDP. An ACC operates like a cruise control, but
adapts the speed depending on distance of the ve-
hicle driving ahead. Thereby, modern sensor types
like radar (Abou-Jaoude, 2003) or video based sys-
tems (Murray and Jackson, 2006) are used. An LDP
system adjusts the steering behavior as well as ac-
/decelerating to keep the car in its lane. There-
fore, different sensors like an infrared sensor or video
based system are used in order to detect lane mark-
ers (Litkouhi, 2012). From a functional point of
view, ACC and LDP are independent from each other.
Thus, one could assume that ACC as well as LDP
could be tested and analyzed independently from each
other since they are not linked in any way. However,
this assumption has not been scientifically proven
yet, that’s why further profound research is necessary.
First, an FM is needed covering the entire SPLs of the
configurable car. Thus, this FM contains an abstract
feature assistance systems including the concrete sub-
features ACC as well as LDP. Since the feature assis-
tance systems is optionally, one sub-feature must be
selected at least. Fig. 2 shows an excerpt from the
FM.
All safety-critical features are tagged with a
boolean flag for SST (legend: safety, security, tim-
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
210
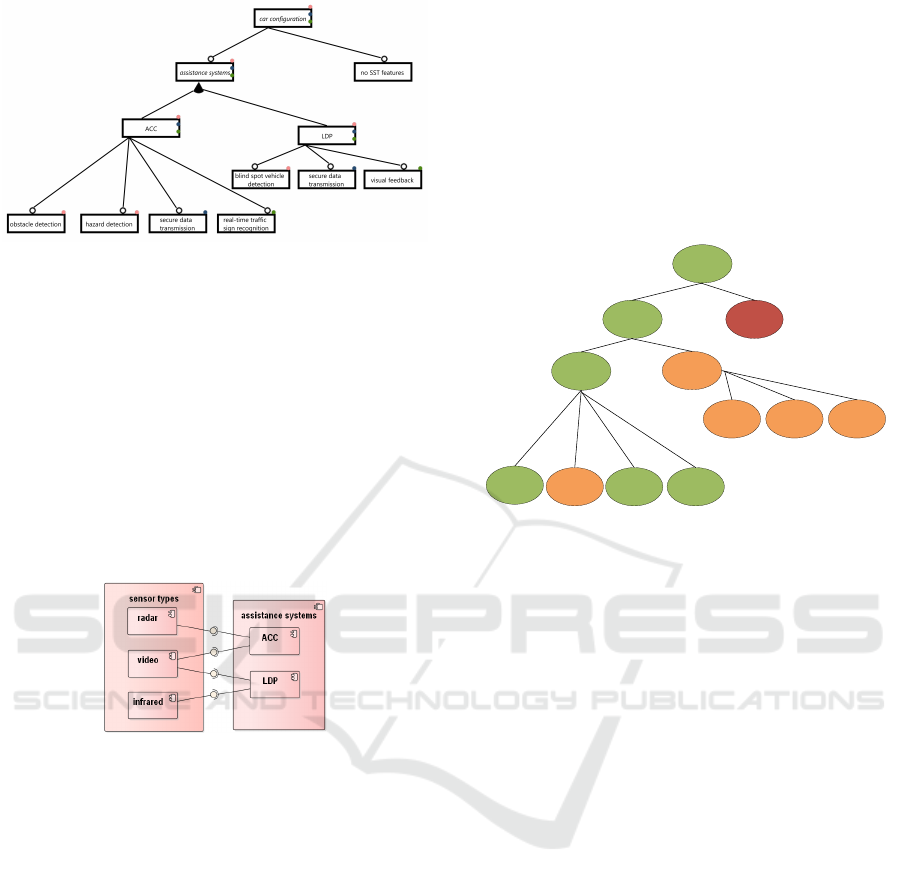
Figure 2: Excerpt from an FM of a car configuration.
ing) in order to trace the individual concerns during
the whole algorithm. Thus, the FM serves as a central
model of control, in which the detailed SST informa-
tion of the individual assistance systems are stored.
Since the assumption was made that the ACC as well
as the LDP could be tested separately, an accurate
review is mandatory checking which system compo-
nents of the features ACC and LDP are concerned in
each case. For this purpose, it is essential to look into
the underlying System Model (SM), which is depicted
in Fig. 3. It shows dependencies between the different
sensor types and assistance systems.
Figure 3: Abstract SM of the case study.
Thereby, one will realize that the ACC uses the
components radar and video whereas the LDP uses
the components infrared and video. Since the compo-
nent video is used from both, the ACC and the LDP,
a separate testing between ACC and LDP is not rea-
sonable, i.e., ACC depends on LDP and vice versa.
Hence, it is the main objective to find out these fea-
tures in the FM having a similar level of SST. For this
purpose, a reachability tree is created with the same
hierarchical structure as the source FM. The values of
the nodes correspond to
1. the SST values of the FM (legend: T = true, F =
false) and
2. the Equivalence Class (EC) of the correspond-
ing feature that is equated with the last super-
ordinated abstract feature.
For instance, {{TTT}, AS} means that safety, security
as well as timing is assigned to true. The second value
of the node is assigned to the EC assistance systems.
By means of depth-first search, all the distinct
paths of the reachability tree are chosen. The paths
may not contain the FFF value since FFF reflects
non safety-critical issues or features. Fig. 4 shows the
underlying reachability tree of the case study. After
the depth-first search, the green colored paths must
be tested and analyzed in further steps. The orange
colored nodes are duplicated since they are already
included in other paths and are assigned to the same
EC than other ones. The red colored items are non
safety-critical and must not be considered anymore.
{{TTT}, CC}
{{TTT}, CC}
{{TTT}, AS}
{{TFF}, AS}
{{FFF}, CC}
{{TFF}, AS}
{{TFF}, AS}
{{TTT}, AS}
{{FFT}, AS}{{FTF}, AS}
{{FTF}, AS} {{FFT}, AS}
Figure 4: Reachability tree of the application example with
SST tags, equivalence classes and paths to be checked.
As can be seen, by means of the reachability tree
of Fig. 4 LDP has been eliminated for further testings
and analyses, i.e., the complexity has been reduced
to the green paths. This is justified because both, the
ACC as well as the LDP are assigned to the same EC.
Moreover, the ACC and the LDP have a common used
component: the video based sensor. Furthermore, the
ACC uses a radar sensor whereas the LDP uses an in-
frared sensor. It can thus be concluded that the radar
sensor has similar SST requirements as the infrared
sensor, although they are designed and implemented
differently. It is hence sufficient to test and analyze
the ACC paths. In this specific case study 3 of 8 paths
need to be elaborated in further steps. Consequently,
a complexity reduction of 62,5% has been guaran-
teed. Since the reachability tree is structurally identi-
cal with the corresponding FM, the relevant features
can be determined easily. Fig. 5 shows the reduced
FM whereas non relevant (SST) features have been
grayed out. This FM can now be used as a basis for
further safety and security analysis.
For instance, the reduced FM may be used sub-
sequently in order to perform a trade-off analysis as
suggested by (Lohm
¨
uller et al., 2018). In this con-
text, there is a linking between the features of the re-
duced FM and the goals/SPOFs of the SGHM in or-
der to eliminate non relevant goals/SPOFs from the
SGHM. Thus, the optimal trade-off can be calculated
by concerning less goals/SPOFs but taking all safety-
Software Product Line Engineering for Safety-critical Systems
211
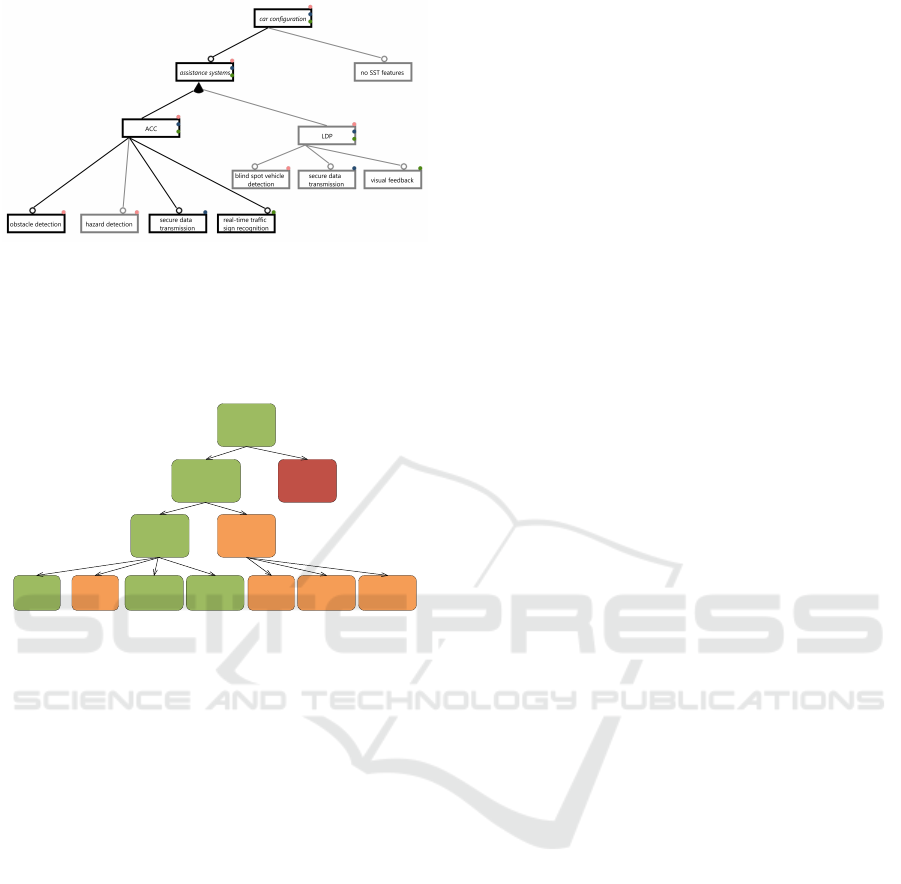
Figure 5: Reduced FM with relevant SST features.
critical requirements into account. Consequently, the
complexity can also be reduced since less calculation
steps are needed. Fig. 6 shows the matched SGHM.
The meaning of the colors is analogous to Fig. 4.
car
configuration
is acceptably
safe
assistance
systems are acc.
safe, secure and
time optimized
ACC is acc.
safe, secure
and time
optimized
LDP is acc.
safe, secure
and time
optimized
no SST Goal
traffic sign
recog. is acc.
time optim.
data
transmission
is acc. secure
hazard
detection
is acc. safe
obstacle
detection
is acc. safe
blind spot
detection
is acc. safe
data
transmission
is acc. secure
visual
feedback is
acc. time opt.
Figure 6: Simplified SGHM of the application example.
4 APPROACH
It is aim of the current section to present the concepts
and theoretical backgrounds generally so that the ap-
proach is applicable in various domains and applica-
tion cases, e.g., automotive, avionics or railway. For
this purpose, a concept picture is shown in Fig. 7,
which represents the entire approach in an abstract
manner .
Step 1. As already mentioned in Sec. 2, FMs
have been established for the realization of SPLs
since they have a well-defined hierarchical structure
by nature. The central FM serves as a basis for all
further steps, i.e., each of these steps is performed
by means of the FM. FMs usually map entire
systems, though only parts of them shall be tested
or analyzed normally since they are relevant for
individual departments. Due to the fact that in this
paper SPLs are applied in safety-critical systems
it is mandatory to annotate a boolean SST flag for
each feature. This enables providing information
about which kinds of safety-critical concerns are
involved. However, despite the advantages of feature
modeling, the complexity of such FMs concerning
safety, security and timing issues is hard to deal with
(Pohl et al., 2013). Therefore, the complexity has to
be reduced and thus the effort is manageable.
Step 2. In the previous step, features of the FM
have been selected, which are relevant for individual
departments. It has not been considered that some
features have further dependencies which are not
apparent at first sight. That’s why the approach links
the FM and the underlying already existing SM.
The latter is realized similar to an UML component
diagram. Thus, it is determined whether there are
additional subcomponents of the individual system
components of the FM, which must be considered as
well (Li et al., 2018). The link is provided between
the individual (abstract) features and the system
components. Since the linking is bidirectional, the
selection of the corresponding features in the FM are
updated according the dependencies of the system
components and their subcomponents in the FM. In
summary, step 2 extends the selection of the features
(of step 1) since there are commonly used system
components.
Step 3. After updating the FM according to the
dependencies with the SM the actual reduction of
complexity is performed. For this purpose, a reacha-
bility tree is created, which maps the same hierarchi-
cal structure of the FM to a new tree structure contain-
ing all SST annotations including all possible paths of
the SPLs. The reachability tree is needed since it con-
tains only relevant information about the FM, which
is necessary for further calculations. Thus, overhead
is reduced and the upcoming algorithmic processes
are facilitated. The values of the nodes are assigned to
SST annotations as well as the EC of the correspond-
ing features. As already mentioned in Sec. 3 the indi-
vidual ECs refer to the corresponding super-ordinated
abstract feature in the FM. All elements within an
EC, i.e., features are equivalent to each other since
these elements comply with reflexivity, symmetry as
well as transitivity (Guta and Kiukas, 2015). It is now
essential to point out all distinct SST requirements.
Essentially, this means that all different paths must be
found starting with the root node. Let us assume there
are paths in the FM, i.e., SPLs like the following:
1. car configuration → assistance systems → ACC
→ detection of maximum permitted speed
2. car configuration → assistance systems → LDP
→ visual warning signal
For both SPLs, the path in the reachability tree
may be the following: {{TTT}, CC} → {{TTT}, CC}
→ {{TTT}, AS} → {{TFF}, AS}. Therefore, it can
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
212
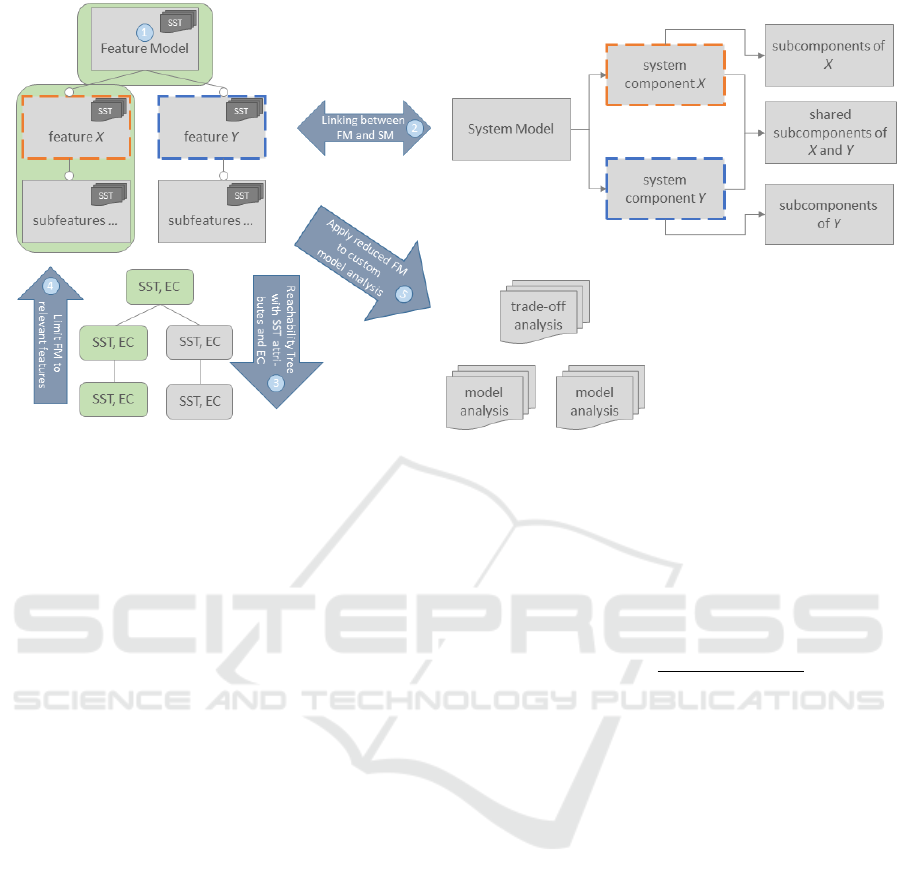
Figure 7: Abstract concept picture of the approach.
be concluded that the detection of maximum permitted
speed as well as visual warning signal have similar
requirements since both elements are within the same
EC (assistance systems) and are just safety-critical,
i.e., it is sufficient to test and analyze just one path. In
order to provide all distinct paths, a depth-first search
algorithm is applied for the entire reachability tree.
There are two termination conditions for the calcula-
tion of each path: The current node is
1. non safety-critical, i.e., the SST value is assigned
to FFF or
2. a leaf, i.e., there are no further nodes that must be
checked for this path.
By means of the depth-first search it is ensured
that all nodes have been considered and duplicate
paths are eliminated. Since FMs and thus also reach-
ability trees may be very extensive, it is important not
to neglect the complexity of this algorithm. If there
is a reachability tree RT with |V| nodes and |E| edges
the complexity of this algorithm is (Naumov et al.,
2017):
DFS(RT ) ∈ O(|V | +|E|)
Thus, the complexity is linear and acceptable in
time, i.e., no optimizations are necessary. In conclu-
sion, it is clarified to which degree the reduction of
complexity is performed. It is dependent on two fac-
tors:
• total number of leaves: |λ(RT )|
• number of distinct leaves with different predeces-
sors: |δ(RT )|
Thus, the following applies for δ(RT ):
∀x, y ∈ δ(RT ) : π(x) 6= π(y)
whereas π(x) defines the set of predecessors on
the basis of node x. Finally, the degree of complexity
reduction CR, is defined as follows:
CR(RT ) =
|λ(RT )| − |δ(RT )|
|λ(RT )|
Step 4 and 5. After step 3, the reachability tree
contains all paths, which are safety-critical and must
be processed anymore. To facilitate this, it is manda-
tory to mark the corresponding features in the FM.
The complexity of the FM and thus safety-critical
SPLs is now reduced and can be used as a basis for
model-based calculations, e.g., trade-off optimization
as shown in Sec. 3.
5 EVALUATION
The approach is evaluated by means of a scenario
based evaluation, i.e., the concept is inspected with
respect to some quality attributes on basis of selected
scenarios. The approach is measured by means of the
following quality attributes:
• interoperability: The emphasis is placed on com-
patibility with other components or systems.
When fulfilling interoperability, the main func-
tionality of the concept of this paper, i.e., com-
plexity reduction, is accomplished as well, since it
is based on the interaction between different mod-
els and components.
Software Product Line Engineering for Safety-critical Systems
213

• maintainability: The approach of this paper will
be investigated in terms of changeability and
testability.
• adaptability: Finally, it is analyzed whether the
concept is expendable and adaptable.
At this point, it must be mentioned that the con-
cept of this paper has been realized in the form of an
Eclipse plugin by applying EMF
1
and Sirius
2
. The
plugin consists of three graphical editors, which en-
able modeling of FMs, SMs and reachability trees.
Each of them are developed in EMF and Sirius, i.e.,
there are three underlying *.ecore meta models at
all. Due to the same modeling environment it en-
ables linkings or transformations between FM ↔ SM,
FM ↔ reachability tree and FM → custom models
or analyses (remember Fig. 7). The logic of the real
complexity reduction is realized in the editor of the
reachability tree.
The evaluation will prove that all the quality at-
tributes, which have been listed above, are fulfilled
by the approach of this paper. Thereby, the following
scenarios have been selected:
1. requirements will be changed
2. a feature of the FM is added, deleted or modified
3. the structure of the SM will be changed
4. the modeling type of the SM is changed
5. consideration of further or other con-
cerns/attributes
The development in industry is proceeding for-
ward with giant strides, thus the requirements may
constantly change. When changing the requirements,
new features will be added or existing features will
be deleted or modified. Moreover, the SM will be
updated in a parallel process as well. Since the reach-
ability tree maps the structure of the FM, it will be
updated automatically as well. Thus, the interoper-
ability between these models and components is ful-
filled. Next, changeability must be proven. Since this
scenario make modifications in the FM and the main-
tenance of the functionality has already been proven
for the quality attribute interoperability, changeabil-
ity is guaranteed. Each complex system has to be
tested in order to avoid errors. As already indicated,
the SM is redundant and the structure of the FM is in-
cluded in similar but another form in the reachability
tree. Thus, the similar models can be tested against
each other for validity and correctness. Hence, it has
been shown that testability is fulfilled as well. Taking
into account that changeability and testability is met,
1
https://www.eclipse.org/modeling/emf/
2
https://www.eclipse.org/sirius/
maintainability is achieved. The modification of the
FM affects just the EMF/Sirius instance model but not
the EMF *.ecore model, i.e., the meta model. The FM
instance model is arbitrary adaptable and expandable
by new functionality like, e.g., adding new features.
In summary, all quality attributes apply to this sce-
nario.
Scenario #1 implies scenario #2 and #3. In this
way, scenario #2 and #3 has already been proven since
scenario #1 has been evaluated.
An SM can be represented by various notations
like, e.g., component diagram, composite structure
diagram or object diagram. The interoperability de-
pends on the interaction between FM, SM and the
reachability tree. For this purpose, the linking be-
tween the features of the FM and the components or
objects of the new SM type must be set. Thus, the
complexity reduction is ensured and interoperability
is fulfilled. When changing the type of modeling an
SM, one type of error might occur: The linkings to
the corresponding features have not been set correctly.
The topic of this scenario is that the type of SM mod-
eling can be changed, i.e., changeability is fulfilled.
By analogy with scenario #1, testability is accom-
plished since the information of the FM are contained
in the reachability tree as well. Furthermore, the SM
usually provides redundant design. This means that
maintainability is fulfilled by changeability and testa-
bility. In keeping with scenario #1, changing mod-
eling type of the SM only relates to instance model
of EMF/Sirius, not to the EMF meta model. That’s
why, the approach is also expendable and adaptable,
i.e., adaptability is met. It has been evaluated that this
scenario fulfills all quality attributes.
The concept of this paper considered the concerns
SST. The following scenario will demonstrate that the
approach is also combinable with other (additional)
concerns or attributes, e.g., reliability. Based on this
new concern, the linkings between the features and
the components of the SM may be updated. The new
concern reliability is annotated in the FM, this ad-
justment also updates the reachability tree since it de-
pends on them. Consequently, interoperability is ful-
filled. Even though, the considered concerns will be
modified, it is possible to modify the FM and SM.
This point has already been shown in scenario #1-3,
thus changeability is ensured. Testability is fulfilled
as well since the FM and SM is usually designed
redundantly usually. That’s why maintainability is
guaranteed. This scenario covers adapting the con-
cerns, i.e., adaptability is fulfilled.
Tab. 1 shows an overview of the quality attributes
and the individual scenarios as listed at the beginning
of this section. As it can be seen, all quality attributes
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
214

Table 1: Overview of the evaluation.
#1 #2 #3 #4 #5
interoperability X X X X X
maintainability X X X X X
portability X X X X X
are fulfilled by each scenario, i.e., the concept of this
paper was successfully proven.
6 RELATED WORK
In this section related publications and projects will
be presented and compared with the approach of com-
plexity reduction of SPLs on safety-critical systems.
6.1 Safety-critical Concerns
The MERgE project
3
, which has been founded by the
ITEA enhances interactions between multi-concerns.
It focusses on safety and security, especially on main-
tenance of quality characteristics during the prod-
uct lifecycle. These include relationships between
them, legacy management, cost reduction and robust-
ness. This project considers various domains, among
them radio communication, automotive and space in-
dustry. (Robinson et al., 2016) However, it has not
been considered that also timing plays an important
role in the context of safety-critical systems. The
MERgE project covers maintenance of safety and se-
curity in the product lifecycle but not in SPLs. Con-
sequently, the reduction of SPL complexity has not
been explained. There are a large number of standards
and norms, which have to be fulfilled in a safety-
critical environment. That’s why (Brunner et al.,
2017) developed an approach how to model, docu-
ment and integrate safety and security requirements.
This approach doesn’t consider the timing concern,
just safety and security. Furthermore, there is no SPL
used. Moreover, there is no complexity reduction
in context of equivalent model components. Since
SST requirements are often in contradiction to each
other, (Lohm
¨
uller et al., 2018) developed a method-
ology how to calculate an optimal trade-off. Thereby,
a Multi-Criteria Decision Analysis algorithm as well
as the Goal Structuring Notation - a structured argu-
mentation notation - is used to solve the conflicts.
However, integrating SPLs as well as the complex-
ity reduction by forming equivalence classes is not
part of this work. (Lohm
¨
uller et al., 2018) In all
the mentioned publications with safety-critical con-
3
https://itea3.org/project/merge.html
text the complexity reduction of SPLs does not seem
to have been evaluated scientifically before.
6.2 Software Product Lines
The work of (Pohl et al., 2005) serves as baseline for
SPLs. In this publication, definitions and scopes of
SPLs are presented more closer to the reader. How-
ever, there is no reference to SST concerns as well as
complexity reduction of SPLs. In (Pohl et al., 2018)
the complexity of FMs is measured and analyzed by
means of worst case execution analyses in order to
improve state-of-the-art analysis tools. The approach
improves complexity in the context of state-of-the-
art analysis tools whereas this paper is focused on
complexity reduction in safety-critical environment.
Furthermore, there is no proposal for the creation of
equivalence classes in order to cluster semantically
similar features. (Li et al., 2018) propose an approach
to reduce the complexity of FMs. In this paper, the
complexity is reduced by linking the FM with the SM.
However, in our paper equivalence classes are built
in order to reduce complexity. In this way, complex-
ity can be reduced even further. Li et al. achieved a
reduction of 40% whereas the approach of our paper
could reach over 60% in case of our case study. More-
over, we considered safety-critical requirements, like,
e.g., SST whereas Li et al. only considered econom-
ical requirements. In (Hitesh and Kumari, 2018) a
concept has been proposed to optimize feature se-
lection in order to choose the elements that will be
reused most commonly. This procedure is applica-
ble if economic goals, like, e.g., costs play an im-
portant role. However, in our paper safety-critical
requirements must be preferred. In this context, it
may have fatal consequences if only most commonly
reused features will be considered.
7 CONCLUSION AND OUTLOOK
In this paper, an approach has been presented to re-
duce complexity of Feature Models with considera-
tion of Safety, Security and Timing concerns. In this
context, it has been explained that the complexity re-
duction depends on system components of the Sys-
tem Model with respect to Safety, Security and Tim-
ing concerns. Furthermore, an algorithmic has been
developed for detecting substructures of an Feature
Model that have similar SST requirements. For that
purpose, a reachability tree has been used to find simi-
lar substructures. It is also applied for finding suitable
equivalence classes in order to cluster related features.
In conclusion, the Feature Model is reduced accord-
Software Product Line Engineering for Safety-critical Systems
215

ing to Safety, Security and Timing constraints and can
be used for further model analyses. The evaluation
showed that the modification of features is possible.
For future work, it might be feasible to integrate a
change impact analysis. Thus, it would be possible to
determine whether a feature or set of features is prof-
itable with regard to a level of complexity reduction.
REFERENCES
Abou-Jaoude, R. (2003). ACC Radar Sensor Technology,
Test Requirements, and Test Solutions. IEEE Transac-
tions on Intelligent Transportation Systems, 4(3):115–
122.
Brunner, M., Huber, M., Sauerwein, C., and Breu, R.
(2017). Towards an Integrated Model for Safety and
Security Requirements of Cyber-Physical Systems.
In 2017 IEEE International Conference on Software
Quality, Reliability and Security Companion (QRS-
C), pages 334–340, Prague, Czech Republic.
Buchmann, T. and Greiner, S. (2018). Managing Variabil-
ity in Models and Derived Artefacts in Model-driven
Software Product Lines. In Proceedings of the 6th In-
ternational Conference on Model-Driven Engineering
and Software Development - MODELSWARD, pages
326–335, Funchal, Madeira, Portugal.
Guta, M. and Kiukas, J. (2015). Equivalence Classes
and Local Asymptotic Normality in System Identifi-
cation for Quantum Markov Chains. Communication
in Mathematical Physics, 335(3):1397–1428.
Hitesh and Kumari, A. C. (2018). Feature Selection Opti-
mization in SPL using Genetic Algorithm. Procedia
Computer Science, 132:1477–1486.
Kang, K. C., Cohen, S. G., Hess, J. A., Novak, W. E.,
and Peterson, A. S. (1990). Feature-Oriented Domain
Analysis (FODA) Feasibility Study. Technical report,
Carnegie Mellon University - Software Engineering
Institute.
Lee, K., Kang, K. C., and Lee, J. (2002). Concepts
and Guidelines of Feature Modeling for Product Line
Software, Engineering. In Proceedings of the 7th In-
ternational Conference, ICSR-7, Austin, USA.
Li, M., Grigg, A., Dickerson, C., Guan, L., and Ji, S. (2018).
A Product Line Systems Engineering Process for Vari-
ability Identification and Reduction. ArXiv e-prints.
Litkouhi, B. B. (2012). Lane Departure Warning and
Change Assist System Utilizing Active Materials.
United States Patent. Patent No.: US 8,111,147 B2.
Lohm
¨
uller, P., Fendt, A., and Bauer, B. (2018). Multi-
Concerns Engineering for Safety-Critical Systems.
In Proceedings of the 6th International Conference
on Model-Driven Engineering and Software Devel-
opment - MODELSWARD, pages 504–510, Funchal,
Madeira, Portugal.
Murray, P. and Jackson, D. (2006). Camera Technique for
Adaptive Cruise Control (ACC) Sensor Adjustment.
United States Patent. Patent No.: US 7,121,011 B2.
Naumov, M., Vrielink, A., and Garland, M. (2017). Paral-
lel Depth-First Search for Directed Acyclic Graphs. In
Proceedings of the Seventh Workshop on Irregular Ap-
plications: Architectures and Algorithms, pages 4:1–
4:8, New York, NY, USA.
Ord
´
o
˜
nez, L. D., Schweitzer, M. E., Galinsky, A. D., and
Bazerman, M. H. (2009). Goals Gone Wild: The Sys-
tematic Side Effects of Over-Prescribing Goal Setting.
Working Paper.
Pohl, K., B
¨
ockle, G., and van der Linden, F. (2005). Soft-
ware Product Line Engineering: Foundations, Princi-
ples, and Techniques. Springer.
Pohl, R., H
¨
ochsmann, M., Wohlgemuth, P., and Tischer,
C. (2018). Variant Management Solution for Large
Scale Software Product Lines. In Proceedings of the
40th International Conference on Software Engineer-
ing: Software Engineering in Practice, pages 85–94,
New York, NY, USA.
Pohl, R., Stricker, V., and Pohl, K. (2013). Measuring the
Structural Complexity of Feature Models. In Proceed-
ings of the 28th IEEE/ACM International Conference
on Automated Software Engineering, pages 454–464,
Silicon Valley, CA, USA.
Robinson, C. R., Pequery, J., and Michiels, S. (2016).
MERgE: Technology Advancement for Cohesion of
Concerns in System Engineering. In Proceedings of
CERTS 2016: The 1st Workshop on Security and De-
pendability of Critical Embedded Real-Time Systems,
pages 25–30, Porto, Portugal.
Springer, M. (2016). Was ist der Unterschied zwis-
chen Safety und Security? https://www.tuev-
nord.de/explore/de/erklaert/was-ist-der-unterschied-
zwischen-safety-und-security/. accessed June 8th,
2018.
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
216
