
Multi-stream CNN based Video Semantic Segmentation
for Automated Driving
Ganesh Sistu
1
, Sumanth Chennupati
2
and Senthil Yogamani
1
1
Valeo Vision Systems, Ireland
2
Valeo Troy, U.S.A.
Keywords:
Semantic Segmentation, Visual Perception, Automated Driving.
Abstract:
Majority of semantic segmentation algorithms operate on a single frame even in the case of videos. In this
work, the goal is to exploit temporal information within the algorithm model for leveraging motion cues and
temporal consistency. We propose two simple high-level architectures based on Recurrent FCN (RFCN) and
Multi-Stream FCN (MSFCN) networks. In case of RFCN, a recurrent network namely LSTM is inserted
between the encoder and decoder. MSFCN combines the encoders of different frames into a fused encoder
via 1x1 channel-wise convolution. We use a ResNet50 network as the baseline encoder and construct three
networks namely MSFCN of order 2 & 3 and RFCN of order 2. MSFCN-3 produces the best results with
an accuracy improvement of 9% and 15% for Highway and New York-like city scenarios in the SYNTHIA-
CVPR’16 dataset using mean IoU metric. MSFCN-3 also produced 11% and 6% for SegTrack V2 and DAVIS
datasets over the baseline FCN network. We also designed an efficient version of MSFCN-2 and RFCN-2
using weight sharing among the two encoders. The efficient MSFCN-2 provided an improvement of 11% and
5% for KITTI and SYNTHIA with negligible increase in computational complexity compared to the baseline
version.
1 INTRODUCTION
Semantic segmentation provides complete semantic
scene understanding wherein each pixel in an image
is assigned a class label. It has applications in vari-
ous fields including automated driving (Horgan et al.,
2015) (Heimberger et al., 2017), augmented reality
and medical image processing. Our work is focused
on semantic segmentation applied to automated dri-
ving which is discussed in detail in the survey paper
(Siam et al., 2017a). Recently, this algorithm has ma-
tured in accuracy which is sufficient for commercial
deployment due to advancements in deep learning.
Most of the standard architectures make use of a sin-
gle frame even when the algorithm is run on a video
sequence. Efficient real-time semantic segmentation
architectures are an important aspect for automated
driving (Siam et al., 2018). For automated driving
videos, there is a strong temporal continuity and con-
stant ego-motion of the camera which can be exploi-
ted within the semantic segmentation model. This in-
spired us to explore temporal based video semantic
segmentation. This paper is an extension of our pre-
vious work on RFCN (Siam et al., 2017c).
In this paper, we propose two types of architectu-
res namely Recurrent FCN (RFCN) and Multi-Stream
FCN (MSFCN) inspired by FCN and Long short-term
memory (LSTM) networks. Multi-Stream Architec-
tures were first introduced in (Simonyan and Zisser-
man, 2014) in which a two stream CNN was propo-
sed for action recognition. They were also success-
fully used for other applications like Optical Flow (Ilg
et al., 2016), moving object detection (Siam et al.,
2017b) and depth estimation (Ummenhofer et al.,
2016). However, this has not been explored for se-
mantic segmentation using consecutive video frames
to the best of our knowledge. The main motivation is
to leverage temporal continuity in video streams. In
RFCN, we temporally processed FCN encoders using
LSTM network. In MSFCN architecture, we combine
the encoder of current and previous frames to produce
a new fused encoder of same feature map dimension.
This would enable keeping the same decoder.
The list of contributions include:
• Design of RFCN & MSFCN architectures that ex-
tends semantic segmentation models for videos.
• Exploration of weight sharing among encoders for
computational efficiency.
Sistu, G., Chennupati, S. and Yogamani, S.
Multi-stream CNN based Video Semantic Segmentation for Automated Driving.
DOI: 10.5220/0007248401730180
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 173-180
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
173

Figure 1: Comparison of different approaches to extend semantic segmentation to videos - a) Frame-level output b) Detect
and track c) Temporal post processing d) Recurrent encoder model and e) Fused multi-stream encoder model.
• Implementation of an end-to-end training method
for spatio-temporal video segmentation.
• Detailed experimental analysis of video seman-
tic segmentation with automated driving datasets
KITTI & SYNTHIA and binary video segmenta-
tion with DAVIS & SegTrack V2 datasets.
The rest of the paper is structured as follows.
Section 2 discusses different approaches for exten-
ding semantic segmentation to videos. Section 3 ex-
plains the different multi-stream architectures desig-
ned in this work. Experimental setup and results are
discussed in section 4. Finally, section 5 provides the
conclusion and future work.
2 EXTENDING SEMANTIC
SEGMENTATION TO VIDEOS
In this section, we provide motivation for incorpo-
rating temporal models in automated driving and
explain different high level methods to accomplish
the same. Motion is a dominant cue in automated
driving due to persistent motion of the vehicle on
which the camera is mounted. The objects of interest
in automotive are split into static infrastructure like
road, traffic signs, etc and dynamic objects which are
interacting like vehicles and pedestrians. The main
challenges are posed due to the uncertain behavior
of dynamic objects. Dense optical flow is commonly
used to detect moving objects purely based on motion
cues. Recently, HD maps is becoming a commonly
used cue which enables detection of static infrastruc-
ture which is previously mapped and encoded. In this
work, we explore the usage of temporal continuity
to improve accuracy by implicitly learning motion
cues and tracking. We discuss the various types
of temporal models in Fig 1 which illustrates the
different ways to extend image based segmentation
algorithm to videos.
Single Frame Baseline: Fig 1 (a) illustrates the typi-
cal way the detector is run every frame independently.
This would be the reference baseline for comparing
accuracy of improvements by other methods.
Detect and Track Approach: The premise of this
approach is to leverage the previously obtained
estimate of semantic segmentation as the next frame
has only incrementally changed. This can reduce
the computational complexity significantly as a
lighter model can be employed to refine the previous
semantic segmentation output for the current frame.
The high level block diagram is illustrated in Fig1
(b). This approach has been successfully used for
detection of bounding box objects where tracking
could even help when detector fails in certain frames.
However, it is difficult to model it for semantic
segmentation as the output representation is quite
complex and it is challenging to handle appearance
of new regions in the next frame.
Temporal Post Processing: The third approach is
to use a post-processing filter on output estimates
to smooth out the noise. Probabilistic Graphical
Models (PGM) like Conditional Random Fields
(CRF) are commonly used to accomplish this. The
block diagram of this method is shown in Fig 1 (c)
where recurrence is built on the output. This step
is computationally complex because the recurrence
operation is on the image dimension which is large.
Recurrent Encoder Model: In this approach, the
intermediate feature maps from the encoders are
fed into a recurrent unit. The recurrent unit in the
network can be an RNN, LSTM or a GRU. Then the
resulting features are fed to a decoder which outputs
semantic labels. In Fig 2a, the ResNet50 encoder
conv5 layer features from consecutive image streams
are passed as temporal features for LSTM network.
While conv4 and conv3 layer features can also be
processed via the LSTM layer, the conv4 and conv3
features from two stream are concatenated followed
by a convolution layer to keep the architecture simple
and memory efficient.
Fused Multi-stream Encoder Model: This method
can be seen as a special case of Recurrent model in
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
174
some sense. But the perspective of multi-stream en-
coder will enable the design of new architectures. As
this is the main contribution of this work, we will des-
cribe it in more detail in next section.
3 PROPOSED CNN
ARCHITECTURES
In this section, we discuss the details of the proposed
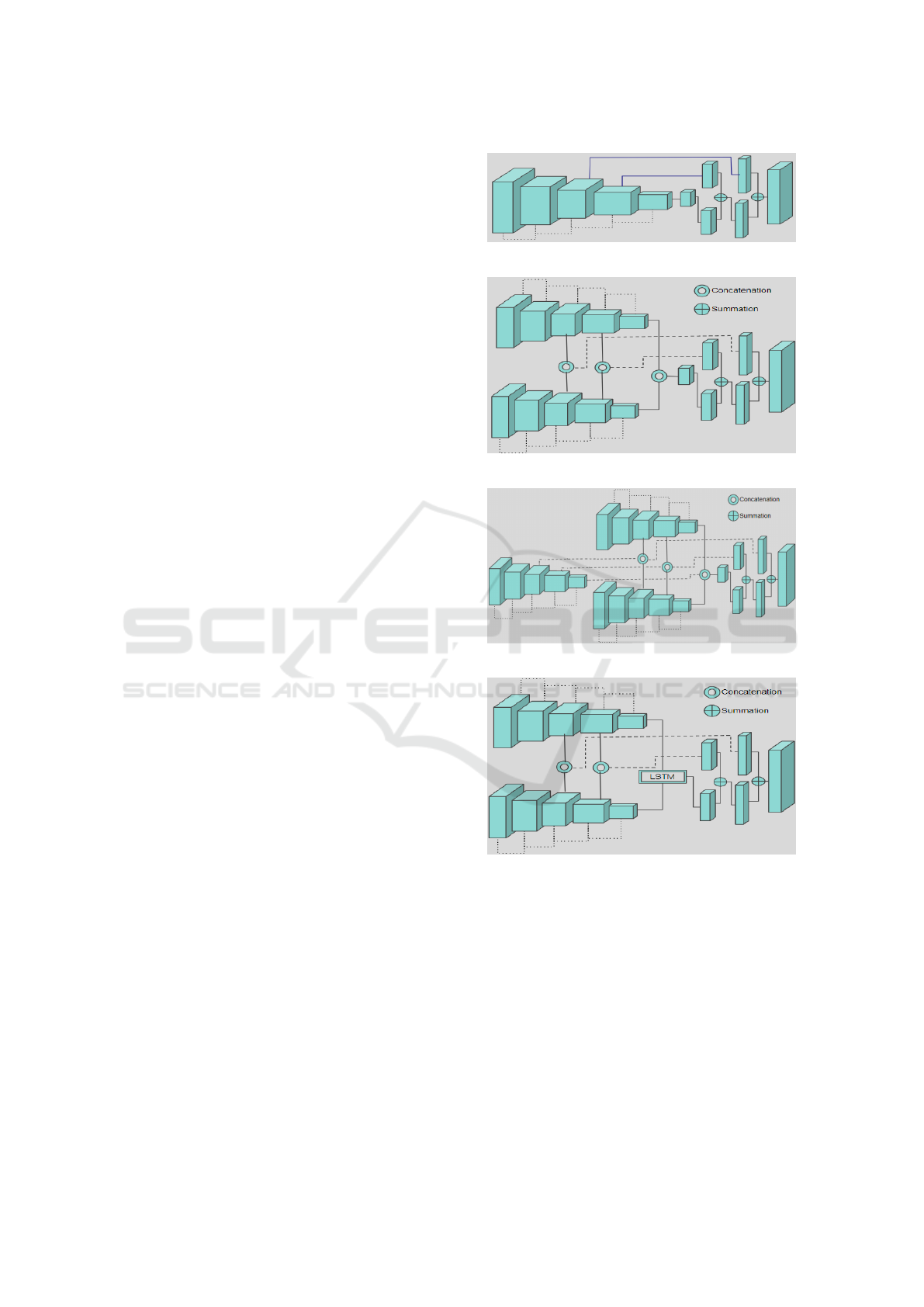
multi-stream networks shown in Fig 2b, 2c & 2d.
Multi stream fused architectures (MSFCN-2 &
MSFCN-3) concatenate the output from each encoder
and fuse them via 1x1 channel-wise convolutions
to obtain a fused encoder which is then fed to the
decoder. Recurrent based architecture (RFCN) uses
an LSTM unit to feed the decoder.
Single Stream Architecture: A fully convolution
network (FCN) shown in Fig 2a is inspired from
(Long et al., 2015) is used as the baseline architec-
ture. We used ResNet50 (Kaiming He, 2015) as the
encoder and conventional up-sampling with skip-
connections to predict pixel wise labels. Initializing
model weights by pre-trained ResNet50 weights,
alleviates over-fitting problems as these weights are
the result of training on a much larger dataset namely
ImageNet.
Multi-stream Fused Architectures: Multi-Stream
FCN architecture is illustrated in Fig 2b & 2c.
We used multiple ResNet50 encoders to construct
the multi-stream architectures. Consecutive input
frames are processed by multiple ResNet50 enco-
ders independently. The intermediate feature maps
obtained at 3 different stages (conv3, conv4 and
conv5) of encoder are concatenated and added to
the up-sampling layers of the decoder. MSFCN-2 is
constructed using 2 encoders while MSFCN-3 uses 3
encoders. A channel-wise 1x1 convolution is applied
to fuse the multiple encoder streams into a single one
of the same dimension. This will enable the usage of
the same decoder.
Multi-stream Recurrent Architecture: A recurrent
fully convolutional network (RFCN) is designed to
incorporate a recurrent network into a convolutional
encoder-decoder architecture. It is illustrated in Fig
2d. We use the generic recurrent unit LSTM which
can specialize to simpler RNNs and GRUs. LSTM
operates over the encoder of previous N frames and
produces a filtered encoder of the same dimension
which is then fed to the decoder.
(a) FCN: Single Encoder Baseline
(b) MSFCN-2: Two stream fusion architecture
(c) MSFCN-3: Three stream fusion architecture
(d) RMSFCN-2: Two stream LSTM architecture
Figure 2: Four types of architectures constructed and tested
in the paper. (a) Single stream baseline, (b) Two stream
fusion architecture, (c) Three stream fusion architecture and
(d) Two stream LSTM architecture.
Weight Sharing Across Encoders: The generic form
of multi-stream architectures have different weights
for the different encoders. In Fig 1 (e), the three en-
coders can be different and they have to be recompu-
ted each frame. Thus the computational complexity
of the encoder increases by a factor of three. Howe-
ver, if the weights are shared between the encoders,
there is no need of recomputing it each frame. One
Multi-stream CNN based Video Semantic Segmentation for Automated Driving
175
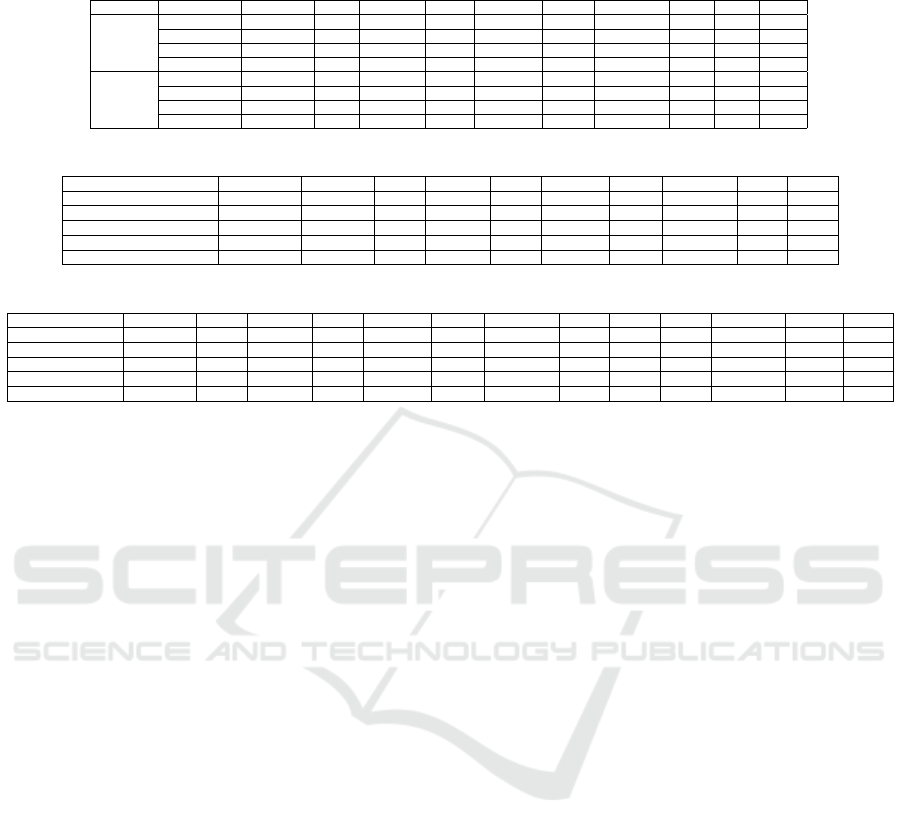
Table 1: Semantic Segmentation Results on SYNTHIA Sequences. We split the test sequences into two parts, one is Highway
for high speeds and the other is City for medium speeds.
Dataset Architecture Mean IoU Sky Building Road Sidewalk Fence Vegetation Pole Car Lane
Highway
FCN 85.42 0.91 0.67 0.89 0.02 0.71 0.79 0.01 0.81 0.72
MSFCN-2 93.44 0.92 0.66 0.94 0.28 0.85 0.78 0.11 0.82 0.71
RFCN-2 94.17 0.93 0.71 0.95 0.31 0.82 0.83 0.13 0.87 0.7
MSFCN-3 94.38 0.93 0.69 0.96 0.31 0.87 0.81 0.12 0.87 0.72
City
FCN 73.88 0.94 0.94 0.72 0.78 0.34 0.54 0 0.69 0.56
MSFCN-2 87.77 0.87 0.94 0.84 0.83 0.68 0.64 0 0.8 0.8
RFCN-2 88.24 0.91 0.92 0.87 0.78 0.56 0.67 0 0.8 0.74
MSFCN-3 88.89 0.88 0.89 0.86 0.74 0.64 0.53 0 0.71 0.72
Table 2: Semantic Segmentation Results on KITTI Video Sequence.
Architecture NumParams Mean IoU Sky Building Road Sidewalk Fence Vegetation Car Sign
FCN 23,668,680 74.00 46.18 86.50 80.60 69.10 37.25 81.94 74.35 35.11
MSFCN-2 (shared weights) 23,715,272 85.31 47.89 91.08 97.58 88.02 62.60 92.01 90.26 58.11
RFCN-2 (shared weights) 31,847,828 84.19 50.20 93.74 94.90 88.17 59.73 87.73 87.66 55.55
MSFCN-2 47,302,984 85.47 48.72 92.29 96.36 90.21 59.60 92.43 89.27 70.47
RFCN-2 55,435,540 83.38 44.80 92.84 91.77 91.67 58.53 86.01 87.25 52.87
Table 3: Semantic Segmentation Results on SYNTHIA Video Sequence.
Architecture Mean IoU Sky Building Road Sidewalk Fence Vegetation Pole Car Sign Pedestrain Cyclist Lane
FCN 84.08 97.2 92.97 87.74 81.58 34.44 62 1.87 72.75 0.21 0.01 0.33 93.08
MSFCN-2 (shared) 88.88 97.08 93.14 93.58 86.81 47.47 75.11 46.78 88.22 0.27 32.12 2.27 95.26
RFCN-2 (shared) 88.16 96.85 91.07 94.17 85.62 28.29 83.2 47.28 87.6 19.12 16.89 3.01 93.97
MSFCN-2 90.01 97.34 95.97 93.14 86.76 73.52 73.63 35.02 87.86 3.62 27.57 1.11 95.35
RFCN-2 89.48 97.15 94.01 93.76 85.88 76.26 70.35 39.86 87.5 8.16 28.05 1.28 94.67
encoder feature extraction per frame suffices and the
fused encoder is computed by combination of previ-
ously computed encoders. This weight sharing ap-
proach drastically brings down the complexity with
negligible additional computation relative to the sin-
gle stream encoder. We demonstrate experimentally
that the weight shared encoder can still provide a sig-
nificant improvement in accuracy.
4 EXPERIMENTS
In this section, we explain the experimental setting
including the datasets used, training algorithm details,
etc and discuss the results.
4.1 Experimental Setup
In most datasets, the frames in a video sequence are
sparsely sampled temporally to have better diversity
of objects. Thus consecutive video frames are not pro-
vided for training our multi-stream algorithm. Synt-
hetic datasets have no cost for annotation and ground
truth annotation is available for all consecutive fra-
mes. Hence we made use of the synthetic autonomous
driving dataset SYNTHIA (Ros et al., 2016) for our
experiments. We also made use of DAVIS2017 (Pont-
Tuset et al., 2017) and SegTrack V2 (Li et al., 2013)
which provides consecutive frames, they are not auto-
motive datasets but realistic.
We implemented the different proposed multi-
stream architectures using Keras (Chollet et al.,
2015). We used ADAM optimizer as it provided
faster convergence. The maximum order (number
of consecutive frames) used in the training is three
(MSFCN-3) because of limitation of memory nee-
ded for training. Categorical cross-entropy is used
as loss function for the optimizer. Maximum num-
ber of training epochs is set to 30 and early stopping
with a patience of 10 epochs monitoring the gains is
added. Mean class IoU and per-class IoU were used
as accuracy metrics. All input images were resized to
224x384 because of memory requirements needed for
multiple streams.
4.2 Experimental Results and
Discussion
We performed four sets of experiments summarized
in four tables. Qualitative results are provided in Fi-
gure 4 for KITTI, Figure 5 for DAVIS and Figure 6
for SYNTHIA. We also provide a video sequence de-
monstrating qualitative results for larger set of frames.
Table 1: Firstly, we wanted to evaluate different
orders on multi-stream and understand the impact.
We also wanted to understand the impact on high
speed and medium speed scenarios. SYNTHIA da-
taset was used for this experiment as it had sepa-
ration of various speed sequences and it was also a
relatively larger dataset. Two-stream networks pro-
vided a considerable increase in accuracy compared
to the baseline. MSFCN-2 provided an accuracy im-
provement of 8% for Highway and 14% for City se-
quence. RFCN-2 provided a slightly better accuracy
relative to MSFCN-2. MSFCN-3 provided marginal
improvement over MSFCN-2 and thus we did not ex-
plore higher orders.
Table 2: KITTI is a popular automotive dataset and
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
176

thus we used it to perform experiments on this real
life automated driving dataset. We reduced our ex-
periments to MSFCN-2 and RFCN-2 but we added
shared weight versions of the same. MSFCN-2 provi-
ded an accuracy improvement of 11% and the shared
weight version only lagged behind slightly.
Table 3: We repeated the experiments of the same
networks used in Table 2 on a larger SYNTHIA
sequence. MSFCN-2 provided an accuracy impro-
vement of 6% in Mean IoU. MSFCN-2 with shared
weights lagged by 1%. RFCN-2 versions had slightly
lesser accuracy compared to its MSFCN-2 counter-
parts with and without weight sharing.
Table 4: As most automotive semantic segmentation
datasets do not provide consecutive frames for tempo-
ral models, we tested in real non-auomotive datasets
namely SegTrack and DAVIS. MSFCN-3 provided an
accuracy improvement of 11% in SegTrack and 6%
in DAVIS. This demonstrates that the constructed net-
works provide consistent improvements in various da-
tasets.
Figure 3: Accuracy over epochs for SYNTHIA dataset.
Table 4: Comparison of Multi-stream network with its ba-
seline counterpart on DAVIS and SegTrack.
Dataset Architecture Mean IoU
SegTrack V2
FCN 83.82
MSFCN-3 94.61
DAVIS
FCN 77.64
MSFCN-3 83.42
BVS(M
¨
arki et al., 2016) 66.52
FCP(Perazzi et al., 2015) 63.14
We have chosen a moderately sized based enco-
der namely ResNet50 and we will be experimenting
with various sizes like ResNet10, ResNet101, etc
for future work. In general, multi-stream provides
a significant improvement in accuracy for this mo-
derately sized encoder. The improvements might be
larger for smaller networks which are less accurate.
With shared weights encoder, increase in computa-
tional complexity is minimal. However, it increases
memory usage and memory bandwidth quite signifi-
cantly due to maintenance of additional encoder fea-
ture maps. It also increases the latency of output by
33 ms for a 30 fps video sequence. From visual in-
spection, the improvements are seen mainly in refi-
ning the boundaries and detecting smaller regions. It
is likely due to temporal aggregation of feature maps
for each pixel from past frames.
MSFCN vs FCN: The single frame based FCN suf-
fers to segment weaker classes like poles and objects
at further distances. Table 3 shows IoU metrics for
weaker classes like Pole, Fence and Sidewalk have
significantly improved in case of multi stream net-
works compared to single stream FCN. Fig 4 visually
demonstrates that the temporal encoder modules help
in preserving the small structures and boundaries in
segmentation.
MSFCN-2 vs MSFCN-3: The increase in the tempo-
ral information has clearly increased the performance
of the semantic segmentation. But this brings an extra
latency for real time applications.
MSFCN-2 vs RFCN: For a multi stream network the
recurrent encoder feature fusion has shown quite a
decent improvement compared to feature concatena-
tion technique. It is also observed that the recurrent
networks helped in preserving the boundaries of the
weaker classes like poles and lane markings. Howe-
ver, RFCN demands more parameters and takes lon-
ger training time for convergence as shown in Fig 3.
Weight Sharing: In most of the experiments,
MSFCN-2 with shared weights provided good impro-
vement over the baseline and its performance defi-
cit relative to the generic MSFCN-2 is usually small
around 1%. However, shared weights version provide
a drastic improvement in computational complexity
as shown by the number of parameters in Table 2.
Shared weights MSFCN-2 has a negligible increase in
number of parameters and computational complexity
as well whereas the generic MSFCN-2 has double the
number of parameters. Thus it is important to make
use of weight sharing.
5 CONCLUSIONS
In this paper, we designed and evaluated two video
semantic segmentation architectures namely Recur-
rent FCN (RFCN) and Multi-Stream FCN (MSFCN)
networks to exploit temporal information. We
implemented three architectures namely RFCN-2,
MSFCN-2 and MSFCN-3 using ResNet50 as base en-
coder and evaluated on SYNTHIA sequences. We
obtain promising improvements of 9% and 15% for
Highway and New York-like city scenarios over the
baseline network. We also tested MSFCN-3 on real
datasets like SegTrack V2 and DAVIS datasets where
11% and 6% accuracy improvement was achieved, re-
spectively. We also explored weight sharing among
Multi-stream CNN based Video Semantic Segmentation for Automated Driving
177
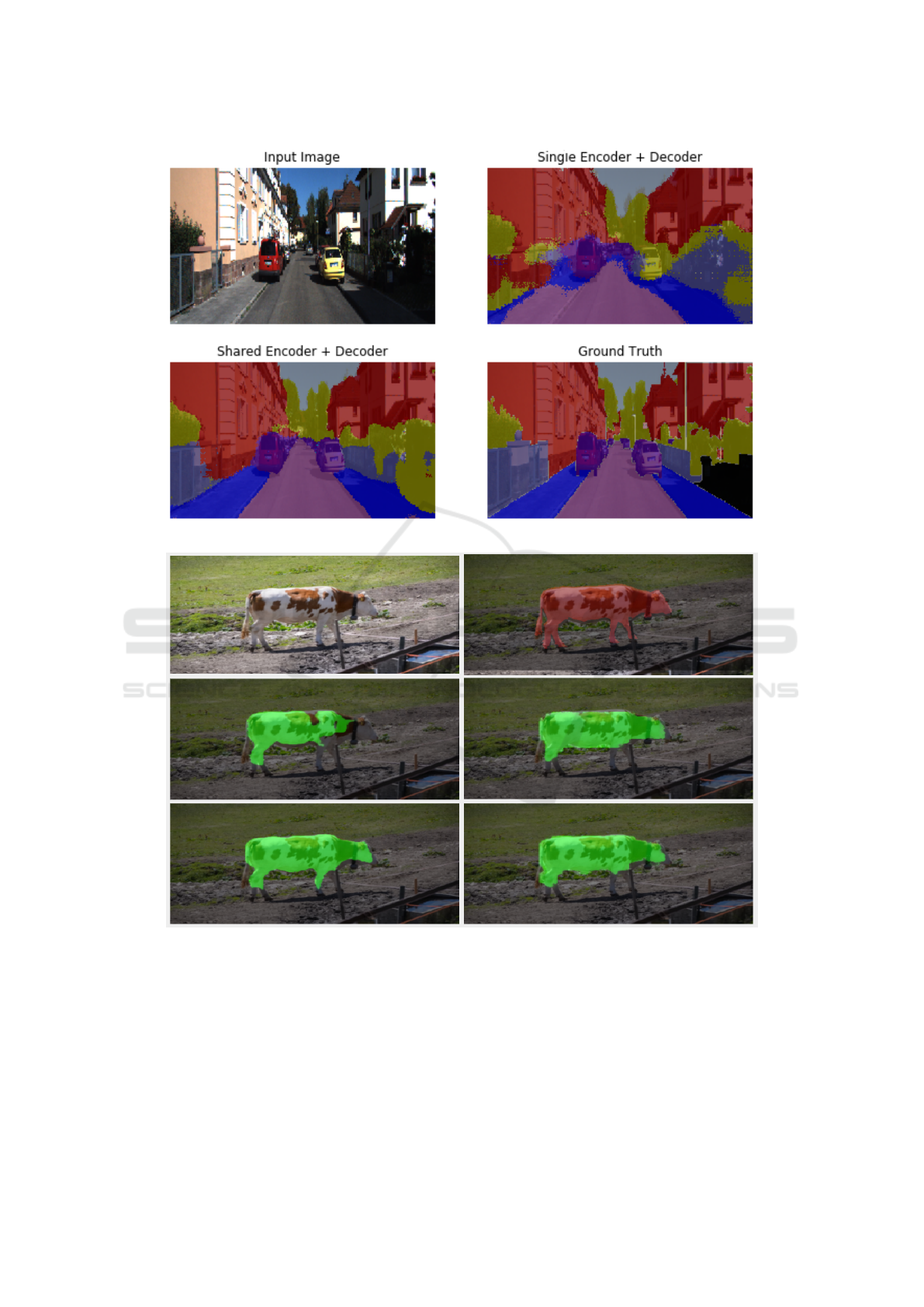
Figure 4: Results on KITTI dataset.
Figure 5: Results over DAVIS dataset. Left to right: RGB image, Ground Truth, Single encoder (FCN), Two stream encoder
(MSFCN-2), Two stream encoder + LSTM (RFCN-2), Three stream encoder (MSFCN-3).
encoders for better efficiency and produced an im-
provement of 11% and 5% for KITTI and SYNTHIA
using MSFCN-2 with roughly the same complexity as
the baseline encoder. In future work, we plan to ex-
plore more sophisticated encoder fusion techniques.
REFERENCES
Chollet, F. et al. (2015). Keras. https://keras.io.
Heimberger, M., Horgan, J., Hughes, C., McDonald, J., and
Yogamani, S. (2017). Computer vision in automated
parking systems: Design, implementation and chal-
lenges. Image and Vision Computing, 68:88–101.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
178
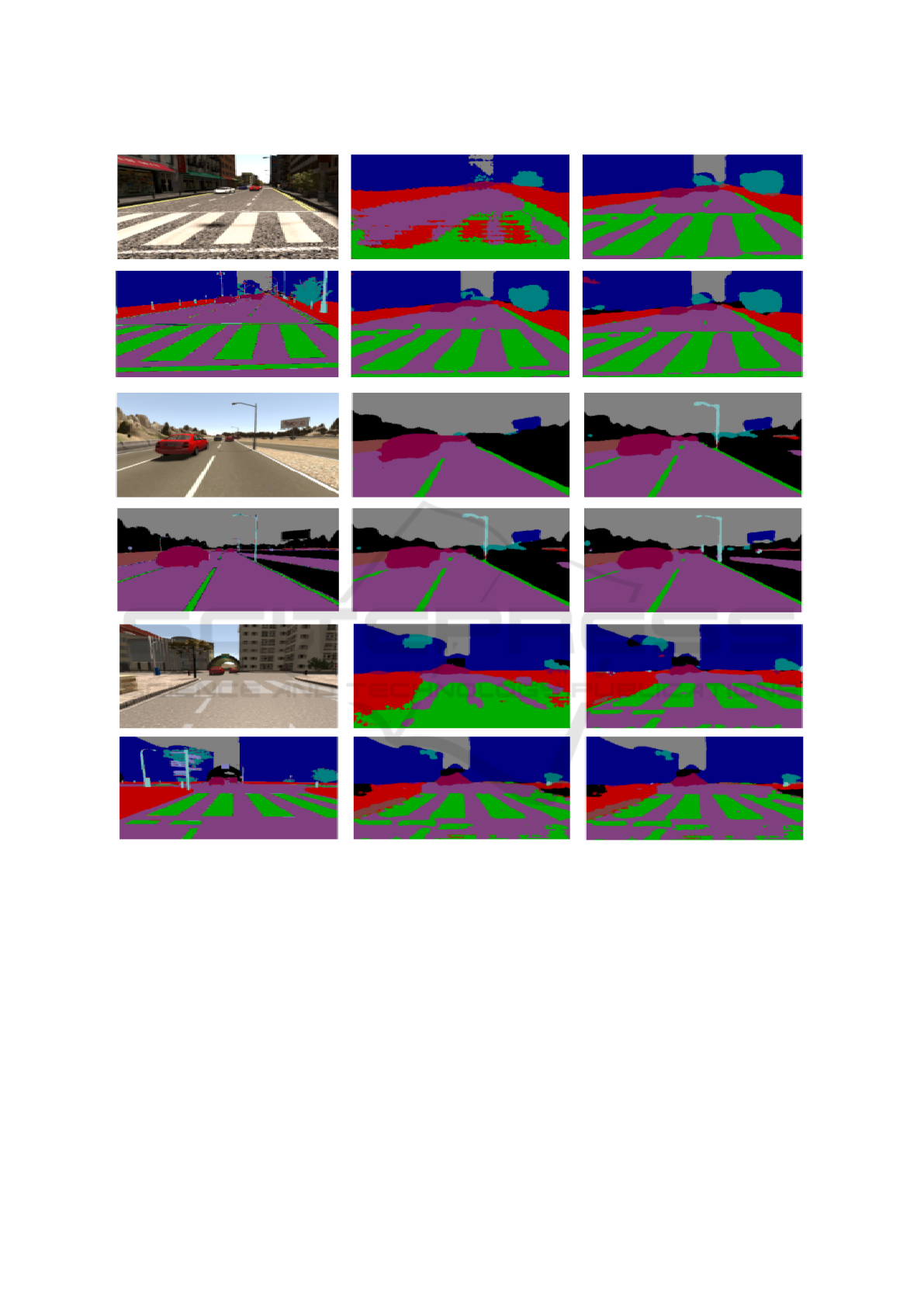
Figure 6: Qualitative results of experiments with SYNTHIA dataset. Left to right: RGB image, Single encoder (FCN), Two
stream encoder (MSFCN-2), Ground Truth, Two stream encoder + LSTM (RFCN-2) and Three stream encoder (MSFCN-3).
Horgan, J., Hughes, C., McDonald, J., and Yogamani, S.
(2015). Vision-based driver assistance systems: Sur-
vey, taxonomy and advances. In Intelligent Transpor-
tation Systems (ITSC), 2015 IEEE 18th International
Conference on, pages 2032–2039. IEEE.
Ilg, E., Mayer, N., Saikia, T., Keuper, M., Dosovitskiy, A.,
and Brox, T. (2016). Flownet 2.0: Evolution of optical
flow estimation with deep networks. arXiv preprint
arXiv:1612.01925.
Kaiming He, Xiangyu Zhang, S. R. J. S. (2015). Deep
residual learning for image recognition. CoRR,
abs/1512.03385.
Li, F., Kim, T., Humayun, A., Tsai, D., and Rehg, J. M.
(2013). Video segmentation by tracking many figure-
ground segments. In Proceedings of the IEEE Interna-
tional Conference on Computer Vision, pages 2192–
2199.
Long, J., Shelhamer, E., and Darrell, T. (2015). Fully con-
volutional networks for semantic segmentation. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 3431–3440.
M
¨
arki, N., Perazzi, F., Wang, O., and Sorkine-Hornung, A.
(2016). Bilateral space video segmentation. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition, pages 743–751.
Perazzi, F., Wang, O., Gross, M., and Sorkine-Hornung, A.
Multi-stream CNN based Video Semantic Segmentation for Automated Driving
179

(2015). Fully connected object proposals for video
segmentation. In Proceedings of the IEEE Interna-
tional Conference on Computer Vision, pages 3227–
3234.
Pont-Tuset, J., Perazzi, F., Caelles, S., Arbel
´
aez, P.,
Sorkine-Hornung, A., and Van Gool, L. (2017). The
2017 davis challenge on video object segmentation.
arXiv:1704.00675.
Ros, G., Sellart, L., Materzynska, J., Vazquez, D., and Lo-
pez, A. M. (2016). The synthia dataset: A large col-
lection of synthetic images for semantic segmentation
of urban scenes. In The IEEE Conference on Compu-
ter Vision and Pattern Recognition (CVPR).
Siam, M., Elkerdawy, S., Jagersand, M., and Yogamani, S.
(2017a). Deep semantic segmentation for automated
driving: Taxonomy, roadmap and challenges. In In-
ternational Conference on Intelligent Transportation
Systems (ITSC), pages 29–36. IEEE.
Siam, M., Gamal, M., Abdel-Razek, M., Yogamani, S.,
and Jagersand, M. (2018). Rtseg: Real-time seman-
tic segmentation comparative study. arXiv preprint
arXiv:1803.02758.
Siam, M., Mahgoub, H., Zahran, M., Yogamani, S., Ja-
gersand, M., and El-Sallab, A. (2017b). Modnet:
Moving object detection network with motion and
appearance for autonomous driving. arXiv preprint
arXiv:1709.04821.
Siam, M., Valipour, S., Jagersand, M., Ray, N., and Yo-
gamani, S. (2017c). Convolutional gated recurrent
networks for video semantic segmentation in automa-
ted driving. In International Conference on Intelligent
Transportation Systems (ITSC), pages 29–36. IEEE.
Simonyan, K. and Zisserman, A. (2014). Two-stream con-
volutional networks for action recognition in videos.
In Advances in neural information processing sys-
tems, pages 568–576.
Ummenhofer, B., Zhou, H., Uhrig, J., Mayer, N., Ilg, E.,
Dosovitskiy, A., and Brox, T. (2016). Demon: Depth
and motion network for learning monocular stereo.
arXiv preprint arXiv:1612.02401.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
180
