
Pluggable Drone Imaging Analysis Framework for Mob Detection during
Open-air Events
Jerico Moeyersons, Brecht Verhoeve, Pieter-Jan Maenhaut, Bruno Volckaert and Filip De Turck
IDLab, Department of Information Technology at Ghent University - imec
Zwijnaarde-Technologiepark 15 B-9052 Ghent, Belgium
Keywords:
Drone Thermal Imaging, Video Streaming, Framework, Microservices, Object Detection, Plugin.
Abstract:
Drones and thermal cameras are often combined within applications such as search and rescue, and fire fight-
ing. Due to vendor specific hardware and software, applications for these drones are hard to develop and
maintain. As a result, a pluggable drone imaging analysis architecture is proposed that facilitates the develop-
ment of custom image processing applications. This architecture is prototyped as a microservice-based plugin
framework and allows users to build image processing applications by connecting media streams using mi-
croservices that connect inputs (e.g. regular or thermal camera image streams) to image analysis services. The
prototype framework is evaluated in terms of modifiability, interoperability and performance. This evaluation
has been carried out on the use case of detecting large crowds of people (mobs) during open-air events. The
framework achieves modifiability and performance by being able to work in soft real-time and it achieves the
interoperability by having an average successful exchange ratio of 99.998%. A new dataset containing thermal
images of such mobs is presented, on which a YOLOv3 neural network is trained. The trained model is able to
detect mobs on new thermal images in real-time achieving frame rates of 55 frames per second when deployed
on a modern GPU.
1 INTRODUCTION
Throughout history, having an overview of the en-
vironment from high viewpoints held many benefits.
Nowadays, drones are relatively cheap and provide a
rapid manner to get an overview of a specific area.
The advent of drones and advanced cameras provides
low-cost aerial imaging that creates numerous novel
application opportunities. Traditional cameras for the
visible light spectrum offer high quality images, but
are limited to daytime or artificially lighted scenes.
Thermal cameras measure thermal radiation of ob-
jects in a scene and can therefore operate in utter dark-
ness, revealing information not visible to the normal
eye (Gade and Moeslund, 2014). The combination of
drones and thermal cameras is used in many different
applications such as geography (Harvey et al., 2016),
agriculture (Bendig et al., 2012), search and res-
cue (Rivera et al., 2017), wildlife monitoring (Chris-
tiansen et al., 2014), disaster response (Gonnissen,
2016), maintenance (Workswell, 2016), etc.
Several vendors offer thermal camera products,
some specifically designed for drone platforms.
These cameras often use different image formats,
color schemes and interfaces (Gade and Moeslund,
2014). This leads to issues if applications want to
change the camera that is used, or when the camera
is no longer supported by the vendor, because differ-
ent software needs to be built to interact with the new
camera, which often is a non-negligible cost. This
leads to a problem called vendor lock-in that makes
customers dependent on a certain vendor as they can-
not switch product without making substantial costs, a
problem already very tangible for cloud-based appli-
cations (Satzger et al., 2013). Applications across var-
ious fields often have slightly different functional and
non-functional requirements. As a precursor, several
Belgian fire fighting departments were asked for re-
quirements for a thermal drone platform application.
It quickly became clear that they had various prob-
lems that needed to be solved, such as finding zones
with potential danger of explosions (due to the combi-
nation of high temperature and explosive goods stored
in the vicinity), measuring temperatures in containers,
identifying hot entrances (to counter backdraft e.g.
when opening a door), detecting invisible methane
fires, finding missing persons, etc. Some use cases
need to be evaluated in real-time (during fires), while
64
Moeyersons, J., Verhoeve, B., Maenhaut, P., Volckaert, B. and De Turck, F.
Pluggable Drone Imaging Analysis Framework for Mob Detection during Open-air Events.
DOI: 10.5220/0007260400640072
In Proceedings of the 8th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2019), pages 64-72
ISBN: 978-989-758-351-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

others focus on accuracy (e.g. inspections). An appli-
cation should therefore be able to quickly implement
new detection and analysis features to meet these re-
quirements. Due to the lack of modifiability present
in current software solutions, applications built on
top of aerial thermal imaging remain largely niche
and vendor/equipment-locked (Divya, 2017). Appli-
cations would benefit from a software framework fo-
cused on modifiability and interoperability, to aid in
developing technology-agnostic end-to-end solutions
connecting thermal cameras to different image analy-
sis / detection modules.
This paper presents the requirements for such a
framework and proposes a suitable software architec-
ture. To test the viability of the architecture, a proof-
of-concept prototype is implemented and evaluated
against the initial requirements. As a use case, de-
tection of large crowds (so-called mobs) during open-
air events is investigated. Monitoring crowds dur-
ing open-air events is important, as mobs can cre-
ate potentially dangerous situations through bottle-
necks, blocking escape routes, etc. Detection of mobs
can also be used for rapid identification of fights
and brawls. Through monitoring and detecting these
mobs, these situations can be identified before they
become problematic (Steffen and Seyfried, 2010).
The remainder of this paper is organized as fol-
lows. Section 2 presents similar projects on the topic
of modifiable image analysis frameworks and thermal
object detection. Section 3 presents the requirements
of the framework and the software architecture de-
signed from these requirements. Section 4 presents
the implementation of the framework prototype. The
mob detection experiment is described in Section 5.
Evaluation of the framework and results of the mob
detection experiment are presented in Section 6. Fi-
nally, Section 7 draws conclusions from this research
and indicates where future efforts in this field should
go to.
2 RELATED WORK
The Irish start-up DroneSAR (Slattery, 2017) devel-
oped a search-and-rescue (SAR) drone platform al-
lowing users to stream live images and video from a
drone as it conducts a search for missing persons. The
platform works with any camera, visual and thermal
but focuses on drones from vendor DJI, DroneSAR’s
industry partner. The solution proposed in this paper
is not restricted to only DJI drones and can be em-
ployed for different use-cases.
Amazon introduced the Amazon Kinesis
VideoStreams platform in January 2018 as a
new service for the Amazon Web Services (AWS)
cloud platform. It allows users to stream live video
from devices to the AWS cloud and build applications
for real-time video processing (Inc., 2018). While the
Amazon Kinesis VideoStreams platform certainly has
interesting features, it imposes a vendor lock-in as it
relies solely on Amazon Cloud services, whereas the
open-source solution proposed here can be deployed
on a variety of (cloud) resources and it can even be
deployed locally when there is no up-link to the cloud
available.
The VIPER project by EAVISE and KU Leu-
ven investigated how thermal and video images could
be used for real-time detection of persons using
object detection algorithms based on deep learn-
ing (Goedeme, 2017). Our work evaluated a mob de-
tection experiment based on the YOLOv3 (Redmon
and Farhadi, 2018) object detection algorithm, using
a deep neural network. In previous work, a drone
was used to detect objects in a predefined incident
area such as barrels containing explosive fluid, fires,
firefighters, etc. (Tijtgat et al., 2017a; Tijtgat et al.,
2017b). The framework proposed in this paper offers
an abstraction allowing developers to connect micro-
service based flows in terms of input (e.g. thermal
video, regular video, images), processing (e.g. object
detection, classification, localization) and output (e.g.
REST API, custom applications).
3 REQUIREMENTS AND
SOFTWARE ARCHITECTURE
3.1 Function Requirements
Three general actors are identified for the framework:
an end-user that wants to build an image process-
ing application for a specific use case, input sen-
sor developers integrating new cameras / streams into
the framework, and stream processing module devel-
opers integrating new analysis/detection algorithms
(e.g. analysis, detection, localization, decision sup-
port) into the framework so that end-users can use
them to build their applications. An end-user should
be able to construct an image processing application
by interconnecting predefined camera and analysis
modules. Hence-built applications should be adapt-
able to new use cases by adding or replacing select
modules, retaining the overall functionality of the ap-
plication. Camera and analysis module developers
should be able to add and distribute new camera in-
tegration modules (e.g. new type of thermal camera
with support for per-pixel labeling of temperatures)
Pluggable Drone Imaging Analysis Framework for Mob Detection during Open-air Events
65
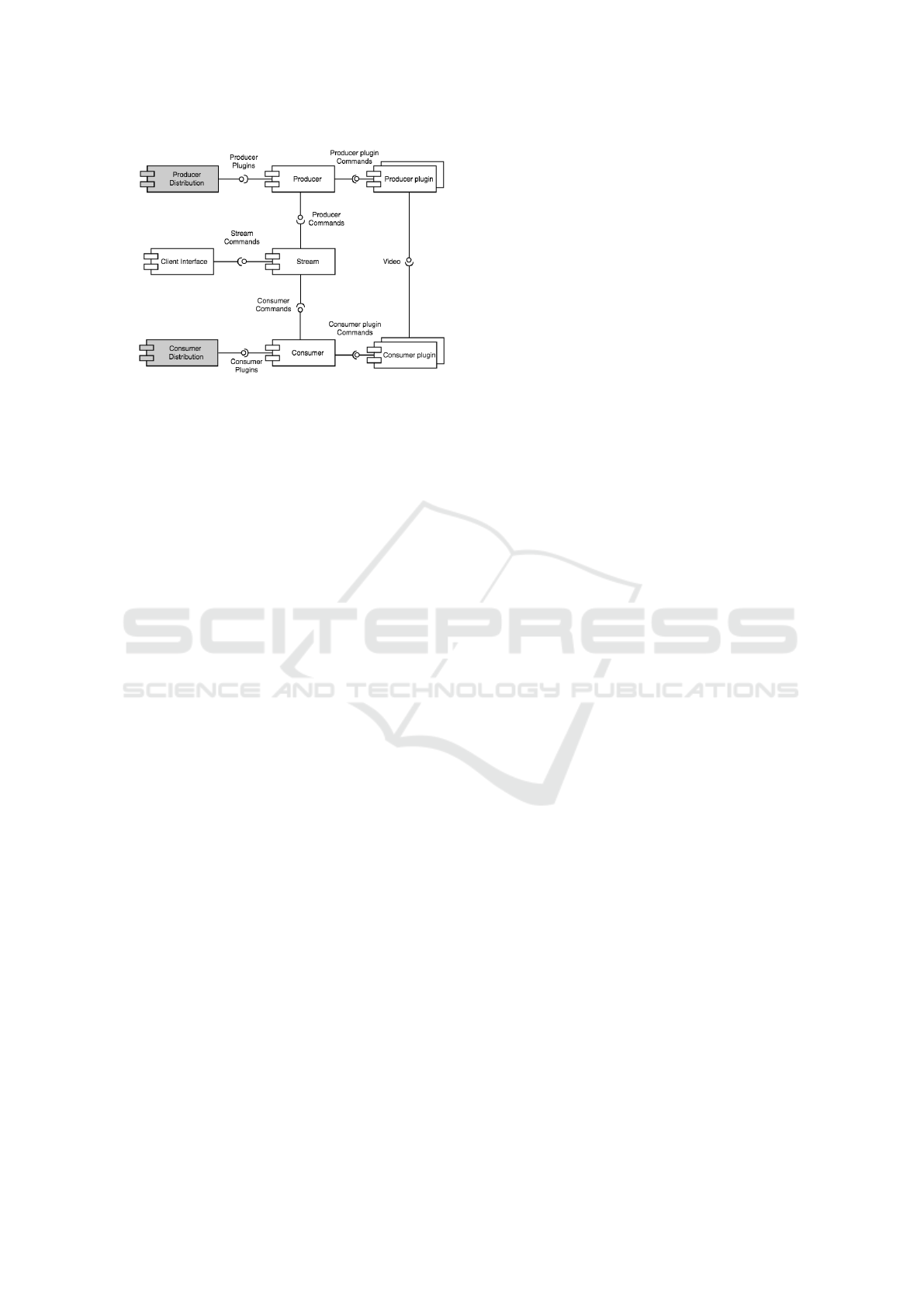
Figure 1: Component-connector overview of the frame-
work. The clear components are the core components of the
framework that each user needs to install to use the frame-
work. The colored components are used for the distribution
of plugins.
and analysis modules (e.g. detection of people at risk
of being crushed during mass-events) to the frame-
work. This allows end-users to focus on the use case,
instead of the technical details of the hardware plat-
forms or algorithms, and allows them to have a wider
selection of hardware and algorithms.
3.2 Non-functional Requirements
Interoperability, modifiability and performance are
identified as the architecturally significant require-
ments. Interoperability specifies that the framework
should be able to interact with various cameras and
analysis software modules via interfaces. The amount
of systems the framework can successfully interact
will increase the business value of the framework, as
end-users can use more devices via the framework to
build applications. The framework needs to be ex-
tendable with new thermal cameras and analysis mod-
ules. Applications built with the framework should
be modifiable to integrate new hardware and soft-
ware. The available hardware on-site for use cases
such as forest fire monitoring is not always power-
ful enough to support heavy image analysis software.
The framework should therefore be able to deploy in
a distributed fashion, to allow more computationally
expensive operations to be executed on more powerful
(potentially cloud-based) remote devices. Some use
cases such as live incident response require soft real-
time streaming of video and manipulation of these
video streams, which should be supported for the
framework to be relevant.
3.3 Software Architecture
An architectural pattern analysis based on the require-
ments presented in Section 3.2 was conducted, from
which a combination of the microservices and mi-
crokernel pattern was selected as the base pattern for
the software architecture. The microservice architec-
ture is an approach to developing a single application
as a suite of small services, each running in its own
process and communicating with lightweight mecha-
nisms, often a HTTP resource API (Lewis and Fowler,
2014). The microkernel pattern enables the frame-
work to be extended via a plugin system and allows
the framework to be deployed in a distributed and
scalable manner.
Figure 1 presents a high-level overview of the ar-
chitecture. End-users interact with the framework via
the Command Line Interface (CLI), a textual inter-
face. Commands are forwarded to the Stream module
that manages the layout and state of the components
in the media pipeline (stream) that the end-user builds
for his use case. To activate and place the components
in a certain layout, the Stream module connects with
the Producer and Consumer components that control
the plugins that process the media. Producer plugins
are devices that produce media, such as thermal cam-
eras. Consumer plugins process and consume media,
such as analysis software and displays. Once a stream
is established, the plugins forward media to each other
in the layout specified by the Stream module. Sup-
port for new cameras and analysis modules can be
added as plugins to the Producer/Consumer Distribu-
tion components that distribute this software so that
end-users can download and install the plugins. Each
module in the architecture is a microservice, allowing
for distributed deployment and enabling the modifia-
bility requirements through interchangeable modules.
Cameras and analysis modules are realized as plugins
for the Producer/Consumer modules implemented as
a microkernel. This allows the framework to easily
build new streams for different use cases and inter-
change components when needed.
3.3.1 Plugin Model
Figure 2 depicts the model of a general framework
plugin. A plugin is part of the microkernel pattern and
defines three interfaces: a source media endpoint to
receive media from different sources, a listener end-
point to forward the processed media to other listen-
ing plugins and an API for framework control. The
framework uses the API to change which sources and
listener a plugin has and to manage its state. By link-
ing plugins together by configuring the source and
listener resources, the framework can build a media
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
66
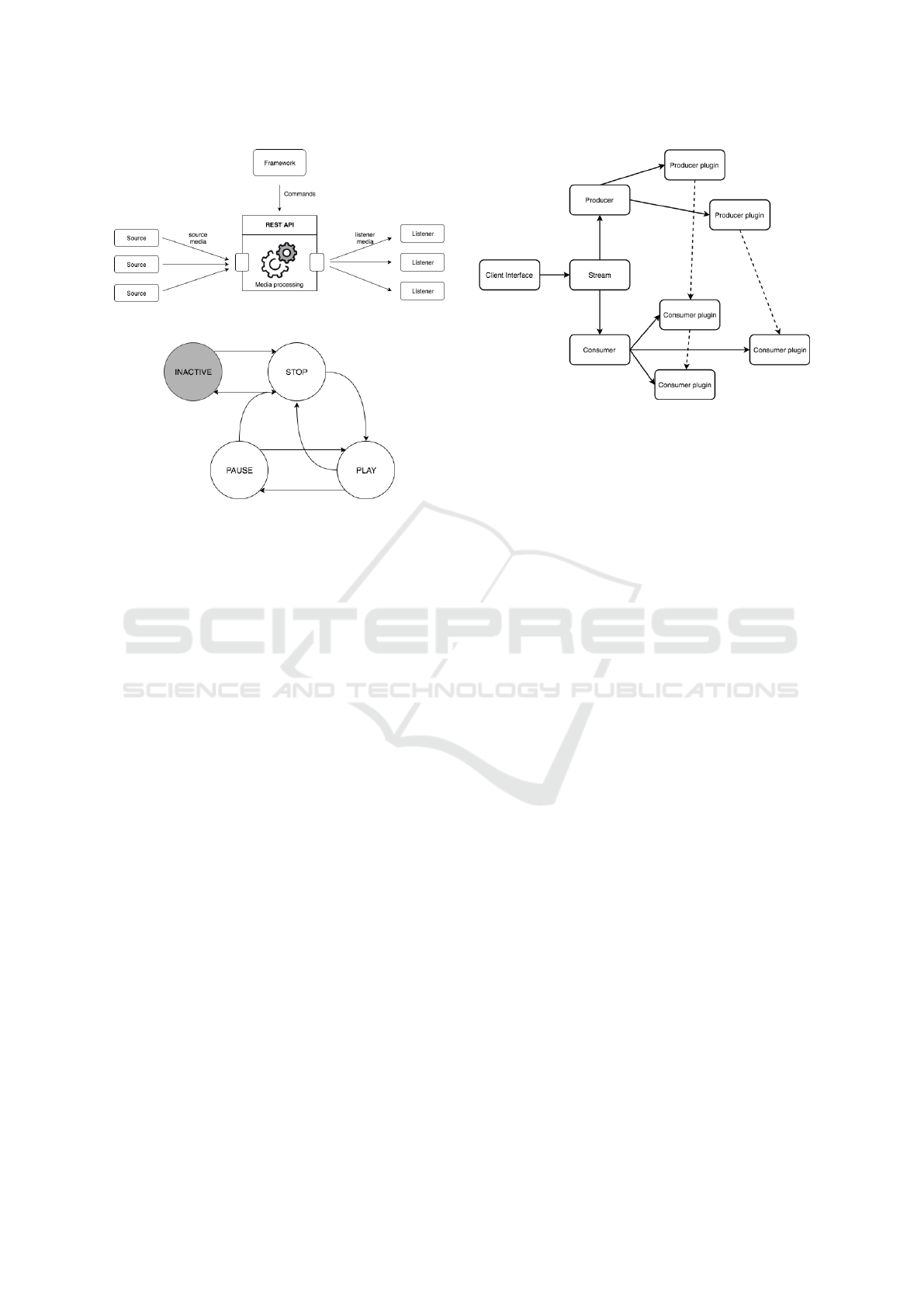
Figure 2: Schematic overview of a plugin.
Figure 3: State transition diagram of a plugin.
processing stream pipeline. Producer plugins have no
sources since they produce media. States are used
to stop and start the media processing of the plug-
ins in the stream. A plugin has the following states:
INACTIVE, PLAY, STOP and PAUSE. Figure 3 de-
picts the state transition diagram for a plugin. A plu-
gin implements the visible states STOP, PAUSE and
PLAY describing if the media processing of the plu-
gin is stopped, paused or processing respectively. The
INACTIVE state is only visible to the framework as
it indicates that there is no active process that runs
the plugin. This is the initial state of a plugin in the
framework. When a plugin is added to a stream, the
plugin microservice is started, transitions to the STOP
state and waits for commands. The REST paradigm
is selected to build this API, with /state, /sources and
/listeners resources that need to be minimally imple-
mented.
3.3.2 Network Topology and Communication
Protocol
The microservices of the framework (Producer,
Steam, Consumer and CLI) and the plugins need a
communication protocol to exchange commands and
data. For sending the commands the HTTP/TCP com-
munication is used. This ensures that commands are
always received and acknowledged increasing the re-
liability of the communication. The asynchronous
RTP/UDP protocol is selected to transfer media be-
tween the plugins to ensure low latency video trans-
fer between plugins to enable soft real-time video
streams. An example of a network topology for a
Figure 4: Network topology. The full lines represent
HTTP/TCP communications, the dashed line RTP/UDP
communications.
stream with 2 Producer plugins and 3 Consumer plu-
gins is depicted in Figure 4.
4 PROTOTYPE
IMPLEMENTATION
The goal of the prototype implementation is to pro-
vide a proof-of-concept framework allowing evalu-
ation with regards to adherence to the requirements
imposed in Section 3. The core framework compo-
nents are implemented, the distribution components
are left out of scope as they focus primarily on the
distribution of supported plugins and as such any ser-
vice repository technology can be used (e.g. Docker
Hub (Docker, 2016)). The core microservices as well
as the plugins are implemented using the Docker soft-
ware containerization framework (Docker Inc., 2018).
Containers virtualize on the operating system and al-
low for portable, lightweight software environments
for processes with minor performance overhead. Us-
ing Docker, the core modules and plugins can be de-
ployed in a local and distributed fashion, scaled up
and down easily as per the needs of the application
and be setup and shutdown easily. The microser-
vice containers communicate via the protocols pre-
sented in Section 3.3.2. The REST APIs are built with
the Flask framework (Ronacher, 2017), a lightweight
Python web development framework well-suited for
rapid prototyping. The Producer/Consumer compo-
nents need access to the Docker daemon running on
the Docker host in order to spin up and shutdown
Docker containers containing the plugin processes.
This is achieved by mounting the Docker client socket
in the Producer/Consumer containers. As a downside,
this gives the container a way to achieve access to the
Pluggable Drone Imaging Analysis Framework for Mob Detection during Open-air Events
67

Figure 5: Filecam plugin - GStreamer pipeline.
Figure 6: Local plugin - GStreamer pipeline.
host, and as such only trustworthy plugins should be
used (Lvh, 2015; Yasrab, 2018). Two sample plugins
were implemented: Filecam, a plugin that produces
video read from a file as shown in Figure 5, and Dis-
play, a plugin that forwards media to the display of
the local device as shown in Figure 6. The plugins
transmit media using the GStreamer video streaming
framework (GStreamer, 2018).
The prototype itself can be managed by the cre-
ated CLI. Through the CLI, the framework can be
started, stopped and new streams, connecting a pro-
ducer plugin with a consumer plugin, can be created,
linked, started and managed.
5 MOB DETECTION
5.1 Dataset
Several publicly available datasets for thermal images
exist (Davis and Keck, 2005; Hwang et al., 2015; Wu
et al., 2014; Li et al., 2007). None of these include
large crowds of people, so a new dataset called the
Last Post dataset was created.
1
. It consists of thermal
video captured at the Last Post ceremony in Ypres,
Belgium. The videos were captured using the Flir
One Pro thermal camera for Android using the Iron
colorscheme. Two main scenes are present in the
dataset, depicted in Figure 7. Mobs are present in
the thermal images, not in the visual images due to
the images being made on separate days. The images
captured for the experiment were manually annotated,
outliers were removed and the dataset was randomly
split in a training and validation set.
5.2 Model
Detecting and classifying objects of interest in im-
ages is known as the object detection problem in
machine learning (Alpaydin, 2014). Several object
detection algorithms and frameworks have been im-
plemented in the past years. A distinction is made
1
https://github.com/IBCNServices/Last-Post-Dataset
(a) Thermal view of the
square
(b) Visual view of the
square
(c) Thermal view of the
bridge
(d) Visual view of the
bridge
Figure 7: The Last Post dataset main scenes.
between traditional models, deep learning two-stage
networks and deep learning dense networks. The tra-
ditional and two-stage methods make predictions rel-
atively slow (in the order of seconds on GPU) when
compared to the dense networks (order of millisec-
onds on GPU) (Redmon et al., 2015). Since the goal
is to use the framework in soft real-time use cases the
latter is preferred. The YOLOv3 model is selected
as it achieves state of the art prediction performances,
can make soft real-time predictions and is available
via the open source neural network framework dark-
net (Redmon and Farhadi, 2018; Redmon, 2016). The
model is pre-trained on the ImageNet dataset (Deng
et al., 2009), trained on a NVIDIA Geforce 980 TX
GPU and the SSE loss is optimized using batch gra-
dient descent (Redmon and Farhadi, 2018). To select
the best weights, the average Intersection of Union
(IoU) and mean Average Precision (mAP) are calcu-
lated on predictions on the validation set. The weights
that achieve the highest mAP are selected as the final
weights.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
68
Table 1: Performance test statistics summary, measured in seconds. All the possible commands from the CLI are evaluated.
Statistic Play Stop Pause Add Delete Elements
Mean 0.690 0.804 0.634 1.363 8.402 0.562
Std deviation 0.050 0.059 0.088 1.037 4.669 0.070
Minimum 0.629 0.708 0.549 0.516 0.505 0.517
25 Percentile 0.665 0.775 0.594 1.049 1.154 0.534
Median 0.678 0.800 0.623 1.11 11.132 0.550
75 Percentile 0.700 0.820 0.653 1.233 11.189 0.562
Maximum 1.016 1.279 1.631 6.25 11.846 1.227
Statistic Print View On Off Link
Mean 0.564 1.22 3.58 24.023 0.849
Std deviation 0.0747 0.260 0.498 0.481 0.170
Minimum 0.517 0.757 3.015 23.707 0.637
25 Percentile 0.536 0.998 3.143 23.750 0.798
Median 0.552 1.214 3.500 23.886 0.853
75 Percentile 0.560 1.433 3.850 24.034 0.877
Maximum 1.149 1.691 4.562 25.326 1.261
6 RESULTS
6.1 Framework
First, acceptance tests for the requirements from Sec-
tion 3 were conducted. Common framework opera-
tions such as manipulating and building a stream have
an average execution time of 0.84 seconds with a stan-
dard deviation of 0.37 seconds. Less common oper-
ations such as deactivating a plugin, starting up the
framework and shutting down the framework have an
average execution time of 3.58, 8.40 and 24.02 sec-
onds with standard deviations 4.67, 0.50 and 0.48
respectively. Deactivating plugins (STOP to INAC-
TIVE transitions) takes a long time, as the container
running the process needs to be removed. Real-time
streaming could not be tested due to the GStreamer
framework having no readily available end-to-end
tests. However when streaming and displaying a
video with the framework a panel of 5 human users
could not differentiate between a streaming video and
a video played using a native media player. Great care
must be taken when building plugins, as their process-
ing speed has a direct impact on the real-time stream-
ing performance. The results of the acceptance tests
are summarized in Table 1.
Interoperability is achieved with the REST APIs
and plugin model presented in Section 3.3.2. The in-
teroperability is tested by having the framework ex-
change information with a mock plugin implement-
ing the specified interface and counting the number of
correct exchanges. The average successful exchange
ratio is 99.998%, caused by the Flask framework not
supporting special characters in an url. The frame-
work can install and detect new plugins at runtime,
achieving runtime modifiability at plugin level. Full
results are summarized in Table 2. Different deploy-
ment schemes were not tested for the prototype.
6.2 Mob Detection
A YOLOv3 object detection consumer plugin is cre-
ated and added to a full stream for the evaluation.
YOLO creates a snapshot from the weights of the
model every 100 epochs. (An epoch is when all the
training data are used once to update the weights in
the neural network). This allows to validate each
set of weights on the validation set and show the
evolution of the validation performance. Figure 8
shows these evolutions for the average IoU and mAP
metrics, based on a pre-defined model provided by
YOLO. This pre-defined model is trained on several
colored images from the COCO-dataset (Lin et al.,
2014) whereby multiple classes such as a dog, a bike,
a car, etc. can be detected. As shown in Figure 8, the
mAP gradually grows from epoch 4500 onwards and
stagnates around epoch 11500. This shows that the
model is not learning anymore and is at risk of over-
fitting. The mAP stagnates in the interval of [88%,
91%]. The average IoU shows a similar trend, but
varies more, because predictions on the same images
rarely are exactly the same.
If we restart the training process without the pre-
defined model, the evolutions for the average IoU and
mAP metrics show a remarkable difference compared
to the training process with the pre-defined model, as
shown in Figure 9.
The best mAP value is achieved at epoch 15700
Pluggable Drone Imaging Analysis Framework for Mob Detection during Open-air Events
69
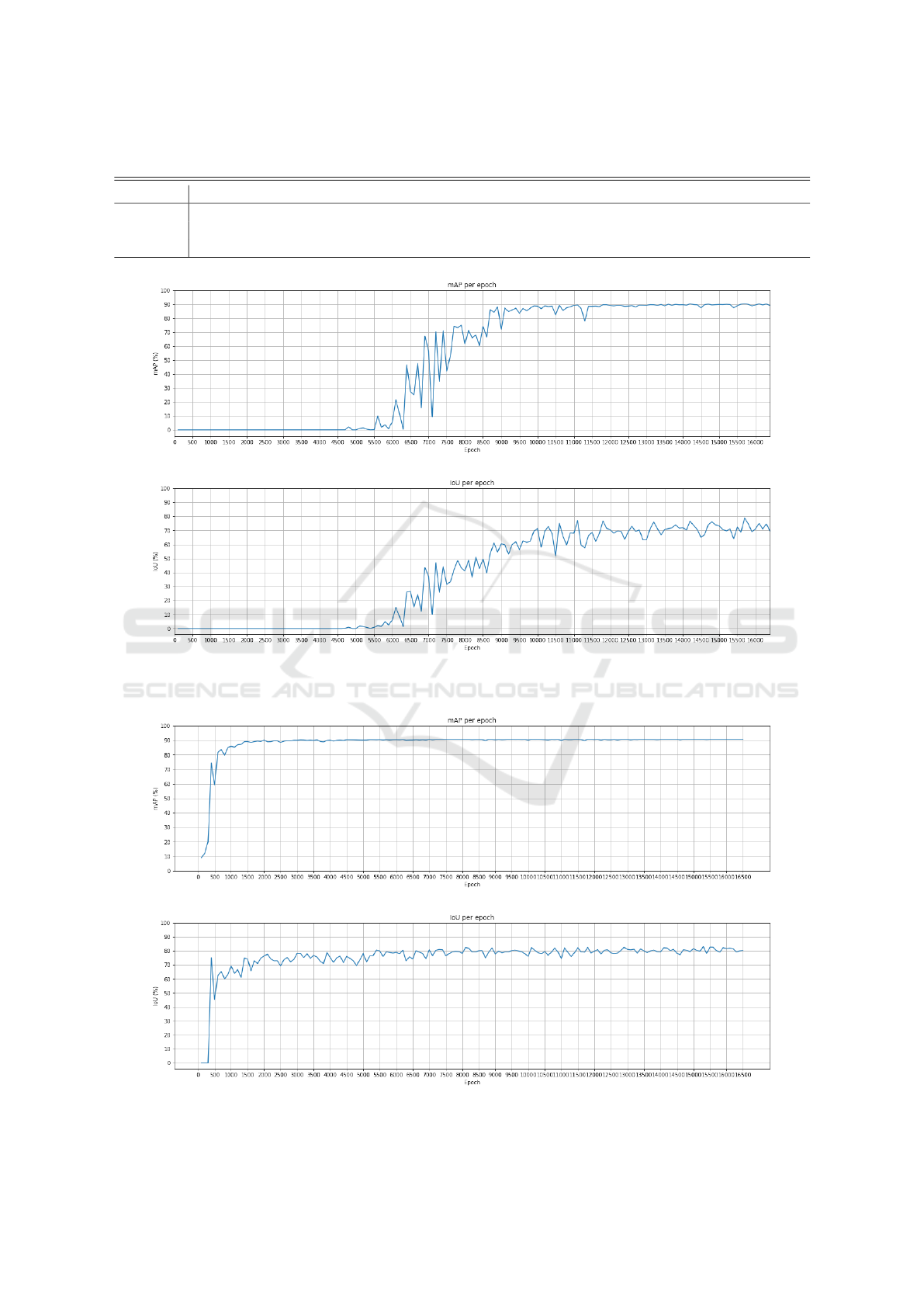
Table 2: Interoperability tests results (S.: Source, L.: Listener).
Value Play Pause Stop Add S. Update S. Delete S. Add L. Update L. Delete L.
Correct 50000 50000 50000 50000 50000 49999 50000 50000 49999
Incorrect 0 0 0 0 0 1 0 0 1
% 100 100 100 100 100 99.998 100 100 99.998
(a) mAP (%) per epoch. Vertical: mAP (%); horizontal: time (in training epochs).
(b) IoU (%) per epoch. Vertical: IoU (%); horizontal: time (in training epochs).
Figure 8: Validation metrics per epoch based on a pre-defined YOLO model.
(a) mAP (%) per epoch. Vertical: mAP (%); horizontal: time (in training epochs).
(b) IoU (%) per epoch. Vertical: IoU (%); horizontal: time (in training epochs).
Figure 9: Validation metrics per epoch without a pre-defined YOLO model.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
70

Figure 10: Model predictions on validation set.
being 90.52%. The weights from this epoch are used
for further testing and validation. The mAP for the
0.5 IoU threshold of YOLOv3 on the COCO bench-
mark dataset is 74.8 %, comparing this to the achieved
mAP for the Last Post dataset, the Last Post mAP is
very high. The reason for this difference is that the
validation set has a high correlation with the training
set. Due to the training set and validation set being
extracted from videos, all images from one video are
correlated in time to each other. Images from the vali-
dation set are thus correlated to images in the training
set, and the model is optimized on these types of im-
ages, explaining the high mAP. This indicates that the
model is overfitting on the training data. This was
confirmed when testing the model on unseen videos.
Although the model could detect a mob, it produced
more visual errors. Because this data was not anno-
tated, no metrics could be extracted. Figure 10 de-
picts some predictions of the model on images from
the validation set. The predicted bounding boxes re-
semble the ground truth bounding boxes quite accu-
rately visually.
To test the speed of the predictions of the model,
the total time to predict images in the validation set
was measured. For the NVIDIA Geforce GTX 980
GPU the average prediction time for one image is
14.673 milliseconds, with a standard deviation of
0.517 milliseconds. This indicates that the upper limit
of the frame rate when making predictions on a video
is approximately 68 frames per second on the GPU.
For comparison, predictions with the model were also
made on a CPU, a 2.6 GHz Intel Core i5-2540 pro-
cessor with AVX instructions speedup. The average
prediction time on the CPU is 5.849 seconds with a
standard deviation of 0.438 seconds, resulting in an
upper limit for the frame rate on the CPU of 0.171
frames per second. Clearly real time object detection
with this model is only possible on a GPU. When gen-
erating predictions on a test video the average frame
rate of the video was 55 frames per second.
7 CONCLUSION AND FUTURE
WORK
In this paper a modifiable drone thermal imaging
analysis framework is proposed to allow end-users
to build flexible video processing pipelines using dif-
ferent sources and analysis modules. The framework
implements a microservice container plugin architec-
ture. Users can rapidly build image processing appli-
cations by interconnecting input, processing and out-
put plugins. The framework is evaluated by means
of a proof-of-concept implementation, which is tested
on the initial requirements. The proposed frame-
work achieves the modifiability and interoperability
requirements at the cost of performance (long shut-
down time of a plugin). The framework is applied
for detecting large crowds of people (mobs) during
open-air events. A new dataset containing thermal im-
ages of such mobs is presented, on which a YOLOv3
neural network is trained. The trained model is able
to detect mobs on new thermal images in real-time
achieving frame rates of 55 frames per second when
deployed on a modern GPU. Cloud auto-scaling is an
extension to the framework that will be investigated
in future work.
REFERENCES
Alpaydin, E. (2014). Introduction to machine learning.
MIT Press, 3 edition.
Bendig, J., Bolten, A., and Bareth, G. (2012). INTRODUC-
ING A LOW-COST MINI-UAV FOR THERMAL-
AND MULTISPECTRAL-IMAGING.
Christiansen, P., Steen, K. A., Jørgensen, R. N., and
Karstoft, H. (2014). Automated detection and recog-
nition of wildlife using thermal cameras. Sensors
(Basel, Switzerland), 14(8):13778–93.
Davis, J. W. and Keck, M. A. (2005). A Two-Stage Tem-
plate Approach to Person Detection in Thermal Im-
agery. Proc. Workshop on Applications of Computer
Vision.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). ImageNet: A Large-Scale Hierarchical
Image Database. In CVPR09.
Divya, J. (2017). Drone Technology and Usage: Current
Uses and Future Drone Technology.
Docker (2016). Docker Hub.
Docker Inc. (2018). Docker - Build, Ship, and Run Any
App, Anywhere.
Gade, R. and Moeslund, T. B. (2014). Thermal cameras and
applications: a survey. Machine Vision and Applica-
tions, 25:245–262.
Goedeme, T. (2017). Projectresultaten VLAIO TETRA-
project. Technical report, KU Leuven, Louvain.
Gonnissen, R. (2016). 3DSafeGuard-VL.
Pluggable Drone Imaging Analysis Framework for Mob Detection during Open-air Events
71

GStreamer (2018). GStreamer: open source multimedia
framework.
Harvey, M. C., Rowland, J. V., and Luketina, K. M. (2016).
Drone with thermal infrared camera provides high res-
olution georeferenced imagery of the Waikite geother-
mal area, New Zealand.
Hwang, S., Park, J., Kim, N., Choi, Y., and Kweon, I. S.
(2015). Multispectral Pedestrian Detection: Bench-
mark Dataset and Baseline. CVPR.
Inc., A. W. S. (2018). What Is Amazon Kinesis Video
Streams?
Lewis, J. and Fowler, M. (2014). Microservices Resource
Guide.
Li, S. Z., Chu, R., Liao, S., and Zhang, L. (2007). Illumina-
tion Invariant Face Recognition Using Near-Infrared
Images. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 29(4):627–639.
Lin, T. Y., Maire, M., Belongie, S., Hays, J., Perona, P., Ra-
manan, D., Doll
´
ar, P., and Zitnick, C. L. (2014). Mi-
crosoft COCO: Common objects in context. Lecture
Notes in Computer Science (including subseries Lec-
ture Notes in Artificial Intelligence and Lecture Notes
in Bioinformatics), 8693 LNCS(PART 5):740–755.
Lvh (2015). Don’t expose the Docker socket (not even to a
container).
Redmon, J. (2013–2016). Darknet: Open source neural net-
works in c. http://pjreddie.com/darknet/.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2015). You Only Look Once: Unified, Real-Time
Object Detection.
Redmon, J. and Farhadi, A. (2018). YOLOv3: An Incre-
mental Improvement. axXiv.
Rivera, A. J., Villalobos, A. D., Monje, J. C., Mari
˜
nas, J. A.,
and Oppus, C. M. (2017). Post-disaster rescue fa-
cility: Human detection and geolocation using aerial
drones. IEEE Region 10 Annual International Confer-
ence, Proceedings/TENCON, pages 384–386.
Ronacher, A. (2017). Welcome to Flask Flask Documenta-
tion (0.12).
Satzger, B., Hummer, W., Inzinger, C., Leitner, P., and
Dustdar, S. (2013). Winds of change: From vendor
lock-in to the meta cloud. IEEE Internet Computing,
17(1):69–73.
Slattery, L.-L. (2017). DroneSAR wants to turn drones into
search-and-rescue heroes.
Steffen, B. and Seyfried, A. (2010). Methods for measur-
ing pedestrian density, flow, speed and direction with
minimal scatter. Physica A: Statistical Mechanics and
its Applications, 389(9):1902–1910.
Tijtgat, N., Ranst, W. V., Volckaert, B., Goedem
´
e, T., and
De Turck, F. (2017a). Embedded Real-Time Object
Detection for a UAV Warning System. 2017 IEEE
International Conference on Computer Vision Work-
shops (ICCVW), pages 2110–2118.
Tijtgat, N., Volckaert, B., and De Turck, F. (2017b). Real-
Time Hazard Symbol Detection and Localization Us-
ing UAV Imagery. 2017 IEEE 86th Vehicular Tech-
nology Conference (VTC-Fall), pages 1–5.
Workswell (2016). Pipeline inspection with thermal diag-
nostics.
Wu, Z., Fuller, N., Theriault, D., and Betke, M. (2014). A
Thermal Infrared Video Benchmark for Visual Analy-
sis. IEEE Conference on Computer Vision and Pattern
Recognition Workshops.
Yasrab, R. (2018). Mitigating Docker Security Issues. Tech-
nical report, University of Science and Technology of
China, Hefei.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
72
