
A Data Visualization Approach for Intersection Analysis using AIS Data
Ricardo Cardoso Pereira, Pedro Henriques Abreu, Evgheni Polisciuc and Penousal Machado
Centre for Informatics and Systems of the University of Coimbra, Department of Informatics Engineering,
P
´
olo II - Pinhal de Marrocos, 3030-290 Coimbra, Portugal
Keywords:
Automatic Identification System, Data Visualization, Data Processing, Magnified Fish-Eye Lens.
Abstract:
Automatic Identification System data has been used in several studies with different directions like traffic
forecasting, pollution control or anomalous behavior detection in vessels trajectories. Considering this last
subject, the intersection between vessels is often related with abnormal behaviors, but this topic has not been
exploited yet. In this paper an approach to assist the domain experts in the task of analyzing these intersections
is introduced, based on data processing and visualization. The work was experimented with a proprietary
dataset that covers the Portuguese maritime zone, containing an average of 6460 intersections by day. The
results show that several intersections were only noticeable with the visualization strategies here proposed.
1 INTRODUCTION
The Automatic Identification System (AIS) is an in-
ternational standard for communication between ves-
sels and terrestrial stations developed to improve mar-
itime safety (Tetreault, 2005). AIS data contains all
the necessary information for mapping the trajecto-
ries followed by each vessel and the general maritime
traffic of any sea, and for that reason it has been used
in several studies. The majority of these studies are
focused particularly in traffic analysis and forecasting
(Sang et al., 2016), pollution control (Busler et al.,
2015), fusion of different maritime data sources (Xu
et al., 2015) or identification of vessels’ anomalous
behaviors (Handayani et al., 2013; Soleimani et al.,
2015). Regarding this last topic, there are a set of
common abnormal activities involving two vessels
that were identified by the domain experts (e.g. navy
operators), such as two vessels sailing very close to
each other, which could be an indicator that an illegal
trade is happening, and two vessels crossing trajec-
tories, especially if one of them goes from the coast
to the intersection zone and comes back after a short
period of time, which could be an indicator that this
vessel went to the zone to pick up some illegal goods
left by the other one. These activities are often related
to abnormal intersections between them. Published
works in the data visualization field have only been
focused in new representations of the traffic situation
from specific areas of interest (Willems et al., 2009;
Gao and Shiotani, 2013; Chen et al., 2016), with mi-
nor or no emphasis on any type of anomalous behav-
iors, including intersections. This work proposes a
new approach, based on data processing and visual-
ization, to assist the detection of anomalous behaviors
by domain experts, with a particular interest on inter-
sections. This approach solves the following prob-
lems from the visualization perspective:
• To process the raw AIS data and extract the inter-
sections from it, a set of data processing tasks are
introduced;
• To detect and unveil the intersections within the
visual clutter created by all the trajectories, a vi-
sual search strategy based on a magnified fish-eye
lens is proposed;
• To properly analyze individual intersections by
displaying the direction and the speed of the ves-
sels, an animated strategy is introduced that dis-
plays the trajectories of the vessels over time;
• To decide which areas of the sea have a higher
probability of containing anomalous intersec-
tions, a visual selection strategy based on high
density areas associated with an abnormality level
is introduced.
The approach was experimented with a propri-
etary dataset that contains data from the Portuguese
maritime zone, collected between February 22 and
March 12 of 2012. An average of 6460 intersections
per day were detected, and the majority are only vis-
ible with the proposed visualization strategies. Two
case studies are presented as a proof of concept.
The remainder of the paper is organized in the fol-
208
Pereira, R., Abreu, P., Polisciuc, E. and Machado, P.
A Data Visualization Approach for Intersection Analysis using AIS Data.
DOI: 10.5220/0007312802080215
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 208-215
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

lowing way: Section 2 presents recent related works
that exploit AIS data with visual strategies, Section
3 introduces the proposed approach for the intersec-
tions analysis, Section 4 presents a proof of concept
with real data and describes the dataset, and Section 5
presents the conclusions and future directions.
2 RELATED WORK
Regarding AIS data visualization, most works are fo-
cused on visual strategies to display the traffic pat-
terns, where the trend is to explore density-based vi-
sualizations. Chen et al. (Chen et al., 2016) intro-
duced the concept of summary visualization where
relevant patterns are visualized through density heat
maps that highlight the high-speed and slow-down ar-
eas. Willems et al. (Willems et al., 2009) proposed
a new kernel density method based on the speed of
the vessels that is able to measure the contribution of
each vessel in each point of the map. Jiacai et al. (Ji-
acai et al., 2012) introduced a new data visualization
model that divides the region of interest into a grid
and calculates an index of the maritime traffic situ-
ation for each cell. Gao and Shiotani (Gao and Sh-
iotani, 2013) introduced the usage of 3D visualiza-
tions to analyze specific vessels and provide a trust-
ful representation of their environment. Fiorini et al.
(Fiorini et al., 2016) proposed a pipeline of actions to
go from raw AIS data to a proper visualization of the
vessels routes, using only open-source tools, being the
final result an interactive web-like geographical visu-
alization. Riveiro and Falkman (Riveiro and Falkman,
2009) introduced an interactive visual analytics model
that is able to present the density probability of each
combination of several AIS kinematic values.
As stated before, the works described are only fo-
cused on presenting the traffic situation of specific ar-
eas of interest, through different visual strategies that
are often density-based and interactive. In general,
minor or no emphasis is given to anomalous behav-
iors, being this a direction yet to be explored. The ap-
proach proposed on this work exploits AIS intersec-
tions as anomalies, which consists of a novelty point.
3 PROPOSED APPROACH
The proposed approach for intersections analysis is
composed by the extraction tasks and three distinct
visualization strategies to address the problems de-
scribed in section 1. This section describes with detail
each of these components.
In order to display the AIS positions several deci-
sions must be made regarding the usage of the visual
variables. These decisions are common to the three
strategies proposed in this work, and are based on
the visual semiology concepts proposed by Jacques
Bertin (Bertin, 1983). AIS positions are represented
by the cartesian coordinate system, which means that
a map projection needs to be applied to the origi-
nal geographic coordinates (latitude and longitude) of
each AIS position. In this work the Spherical Merca-
tor projection is used, mainly because the more im-
portant interactive maps platforms, like Google Maps
and OpenStreetMaps, also use it. Regarding the vi-
sual marks used to represent the AIS positions and in-
tersections, it was decided to represent each position
through a circle with a radius of one pixel and each in-
tersection with the same shape but with a radius of five
pixels. The intersections are displayed in solid black
and each type of vessel has a different color used to
paint its positions, meaning that this visual variable is
being used for association purposes.
3.1 Intersections Extraction
Before applying any visual method, the AIS raw data
must be processed in order to extract the intersections.
A first necessary task is to remove the duplicated posi-
tions of each vessel. This is an important step because
repeated AIS positions will lead to the detection of
multiple intersections that are actually the same. This
work proposes an approach that isolates the positions
of each vessel and detects the ones that are within a
minimum time and distance gaps, being these ones la-
beled as repeated. The time gap is calculated by the
absolute difference between the time-stamps of both
positions, which are in the UNIX Epoch time format.
To calculate the distance between these positions the
Haversine formula is used since it considers the cur-
vature of Earth. This algorithm requires as parameters
the minimum time and distance gaps. The used values
are 15 seconds and one meter and they were obtained
empirically. The second and most important task is to
detect and extract each intersection between different
vessels. For this purpose a new algorithm was intro-
duced that detects an intersection when two positions
of different vessels have time and distance gaps below
the minimum thresholds passed as parameters. Both
gaps are calculated using the same methods from the
previous task that removes the duplicated positions.
The used values for these parameters are 30 minutes
and one kilometer respectively, and they were also ob-
tained empirically. This algorithm does not take into
account the direction of the intersection, considering
A to B and B to A as different, when they are actually
A Data Visualization Approach for Intersection Analysis using AIS Data
209

the same. The algorithm could deal with this issue
but that would have impact on its performance and,
for that reason, the issue is fixed in a third task that it-
erates over the intersections, transforms them into sets
and calculates a hash for each one. Duplicated hashes
are then removed.
3.2 Unveil the Intersections
With all the AIS positions displayed in the same
screen a lot of visual clutter may exist. As a conse-
quence, it can become difficult to detect the intersec-
tions and even more difficult to analyze each one in-
dividually. Therefore, a first necessary step is to cre-
ate the means for the users to efficiently search and
focus on specific intersections. In this work the fish-
eye lens (Bettonvil, 2005; Altera, 2008) is used for
this purpose. This type of lens applies a convex ef-
fect to the image, creating the illusion that it has the
shape of a sphere, an effect commonly called barrel
distortion. With this effect the center of the image be-
comes the focus, while the boundaries become grad-
ually distorted. Consequently, the center of the image
becomes more zoomed, with the cost of losing some
resolution. When combining this type of lens with the
movement of the mouse, the users can focus on spe-
cific AIS positions and intersections, surpassing the
visual clutter issue. Different distortions with spe-
cific characteristics can be applied with a fish-eye lens
through different mapping functions. The most pop-
ular ones are the equidistant, equisolid, orthographic
and stereographic (Bettonvil, 2005). The used func-
tion in this approach is the orthographic mapping and
it was chosen empirically. The conclusion was that
this mapping is the one that better distorts the bound-
aries of the image through a more exaggerated cur-
vature, which gives more focus and zoom to the cen-
ter. To apply the fish-eye effect two parameters are
required: the focal length f
l
and the width radius of
the lens r
x
. Both parameters are correlated and their
values can be obtained empirically. Figure 1 shows
an example of the fish-eye lens applied with different
configurations. On the left an image is displayed with
the fish-eye effect using f
l
= 4 and r
x
= 5, and on the
right the same projection is used but with f
l
= 2. In
this last case, with an increased focal length the zoom
was much higher and the pixel interpolation method -
which is part of the fish-eye projection - was unable to
fill in all the missing gaps, creating the “black pixels”
visible on the image. In this work the fish-eye param-
eters used are f
l
= 3 and r
x
= 5, and the effect is only
applied to a specific area of interest, which is the area
of the map that the user wants to analyze. This area is
defined by the mouse position (mouse
x
, mouse
Y
) and
Figure 1: On the left an image displayed with the fish-eye
effect applied using f
l
= 4 and r
x
= 5, and on the right the
same projection but with f
l
= 2.
by a radius mouse
r
that will create a circle around it.
An example of this behavior is presented on Figure
2, with the original area displayed on the left and the
same area with the fish-eye effect on the right.
Figure 2: On the left the original area in analysis. On the
right the same area with the fish-eye effect applied and the
intersections identified.
The application of the fish-eye lens gives the user
a way to focus and zoom on a specific area, but the
level of magnification may not be enough for an ef-
ficient analysis. Increasing the zoom only by defin-
ing an higher focal length has growth limitations and
will lead to the problem presented on the right im-
age of Figure 1. Therefore, this work combines the
fish-eye effect with levels of magnification. The key
concept is to render the area of the map in analy-
sis n times, where each time the level of zoom is
increased by a scalar zoom
g
. The zoom of the ge-
ographical positions is handled by the majority of
the map projections available (including the Spheri-
cal Mercator) through a scalar that indicates the mag-
nification to be applied. The maximum number of
levels can be predefined or it can be adjusted while
the zoom increases, with this last strategy having a
performance cost. Assuming that zoom
c
is the initial
zoom of the area that corresponds to the level n = 0,
the zoom of each n level is calculated using the for-
mula zoom
l
= zoom
c
+ (n ∗ zoom
g
). An important as-
pect of this method is that the magnification effect
needs to be applied to the center of the area in anal-
ysis, otherwise it would start to change. To ensure
this aspect the cartesian coordinates of each position
in each level need to be shifted according to a point
of reference from the base level (n = 0). This point
of reference (x
rb
, y
rb
) is the AIS position that has the
IVAPP 2019 - 10th International Conference on Information Visualization Theory and Applications
210

minimum euclidean distance between the fixed mouse
position (mouse
x
, mouse
y
) and itself. Considering a
point (x
p
, y
p
) on any given level and the point of ref-
erence (x
rl
, y
rl
) on the same level, the shift formulas
are x
new
= (x
p
− x
rl
+ (x
rb
− mouse
x
) + mouse
r
) and
y
new
= (y
p
− y
rl
+ (y
rb
− mouse
y
) + mouse
r
). These
equations also have an adjustment between the point
of reference in the base level and the mouse position
because this point may not be exactly in the center of
the area. To navigate between the levels of magnifica-
tion the user will first fix the area in analysis through
a mouse click and, after that, two controls to change
the zoom will appear. Each time the zoom level is up-
dated the fish-eye effect is reapplied. This behavior
is presented on Figure 3, displaying the desired effect
on the left with the default magnification and the same
effect on the right with the third level of zoom. When
Figure 3: On the left the fish-eye effect with the default
magnification. On the right the same effect but with the
third level of zoom.
the area in analysis is fixed the intersections inside it
are presented individually on a detail lens located on
the top-right corner of the screen. This lens has the
same level of zoom used on the fish-eye lens and al-
lows the user to analyze each intersection individually
without the visual clutter, as Figure 4 shows. The user
can change intersections using two controls displayed
next to the zoom ones (see Figure 3). When the trajec-
Figure 4: On the left are all the intersections visible through
the fish-eye lens. On the right a specific intersection is iso-
lated through the detail lens.
tories displayed on the detail lens are from two ves-
sels of the same type, the collision of colors can make
the identification of the positions from each vessel a
difficult task. To fix this issue a lighter and darker
color were created for each type of vessel based on
the original palette. These colors are then used when
the above scenario happens.
3.3 Individual Intersections Analysis
Visualizing the vessels trajectories of an intersection
with a static approach has several limitations regard-
ing the amount of features that can be displayed. With
the existing visual variables only the positions of the
vessel and its type can be presented. This means that
two very important features for behavior analysis are
ignored: the speed and the direction. To present these
two features this work uses the motion variable, com-
bined with the position and the orientation, through
an animation approach that allows the visualization
of the vessels moving over time. For the animation
to be performed the period in analysis is divided into
15 minutes frames. This interval was used because
it includes more than one position by vessel (often
two to four positions), which allows a better under-
standing of the trajectories evolution in terms of di-
rection. Each frame contains the vessels positions
from its time interval and the ones from the previous
frames, and it is displayed a quarter of a second after
the previous one, creating the desired motion effect.
Each vessel position is drawn through a circle with a
radius of seven pixels. The positions from the cur-
rent time interval are drawn with an opacity of 100%
but the ones that are from previous frames are drawn
black with an opacity of only 10% (this value was ob-
tained empirically). This creates a trace effect that
allows the perception of how the vessels are moving
over time without losing track of their position in the
current frame.
The vessels new positions and directions are auto-
matically displayed through the animation as a con-
sequence of the motion effect. The points added in
each frame are enough to understand the direction
of a vessel because these new points will change the
orientation of the trajectory. However, the speed at-
tribute requires further efforts to be visible. An ap-
proach was developed where the speed is represented
by the accumulative opacity of the vessels trace over
time. Assuming that a vessel reports its positions in
a fixed period of time (for instance, each five min-
utes), if this vessel is moving slowly the reported po-
sitions will be very close to each other. However, if
the vessel is moving fast these positions will be far
from each other. When all the positions are drawn at
the same time on the trace of the vessel, the ones that
are overlaid will generate a higher opacity because
their individual colors are blended. This means that
the areas of the trajectories where the transparency of
the trace is lower are the ones where the vessels are
A Data Visualization Approach for Intersection Analysis using AIS Data
211

moving slower, because more points were overlaid for
this effect to happen. On the contrary, a trace with
a higher transparency corresponds to a vessel mov-
ing faster. As stated before, this speed visualization
approach only works if the time-span between each
position of a vessel is fixed, which is a problem be-
cause the AIS communication periods are not consis-
tent. To fix this issue a cubic spline interpolation is
applied to every trajectory to generate the missing po-
sitions. As stated in the literature (Zhang et al., 2017;
Sang et al., 2012), this type of interpolation is the
one that adjusts better to the reconstruction of AIS
trajectories, offering just some limitations in the pres-
ence of very tight curves. This interpolation creates a
piecewise function, which means that it defines sev-
eral small sub-intervals through the domain of x, and
has an individual polynomial of degree three for each
one. This aspect is important to make the final func-
tion more smooth and better suitable for curves. The
interpolation is made individually for the latitude and
the longitude, being these variables the output y of the
generated functions and the timestamp in seconds the
input x. The polynomial coefficients of both functions
are calculated with all the AIS positions of the respec-
tive vessel. Each of these positions is then compared
with the one immediately after and, if the time gap
between them is over five minutes, new positions are
generated through the interpolated functions, with in-
tervals of also five minutes until the gap is filled. This
five minutes period was defined empirically. Figure 5
shows an example of a frame from an animation with
four vessels sailing at different speeds. It is visible
that the tanker vessel (the pink one) in the middle is
sailing at a low speed, maintaining a route in a very
small area, while the other two tankers sailed faster.
The cargo vessel (the dark blue one) started slow but
increased the speed roughly in the middle of the tra-
jectory.
Figure 5: An example of a frame from an animation with
vessels sailing at different speeds.
3.4 Areas with Anomalous Intersections
The visual search mechanism already described is im-
portant to identify and isolate intersections for indi-
vidual analysis, but when a big quantity of intersec-
tions exist within the visible data it may be difficult
to decide where to start the search. With this issue
in mind, an approach to identify areas with a higher
probability of having anomalous intersections is pro-
posed in this work. The approach can be described in
the following steps:
1. Identify the areas, for each day, where the quantity
of intersections is higher;
2. Analyze if those areas are constant over the days;
3. Define more frequent areas as less probable of
having abnormal behaviors;
4. Visualize the areas and the abnormality levels.
Regarding the first step, areas with a higher quan-
tity of intersections can be seen as clusters with a
higher density. Therefore, a density-based cluster-
ing strategy was used to extract these areas from the
data. Density Based Spatial Clustering of Applica-
tions with Noise (DBSCAN) has been used exten-
sively with AIS data and had shown good results (Pal-
lotta et al., 2013; Gonzalez et al., 2014), which made
it the most obvious choice for the algorithm to be
used. However, this algorithm requires the minimum
number of points by clusters (MinPts) and the dis-
tance between each point and its neighbors (ε), and
this last one is not easy to estimate because there are
zones of the map where the distance between the ves-
sels positions is supposed to be lower (e.g. near the
ports) and zones where it is supposed to be higher
(e.g. high sea corridors). For this reason the Hier-
archical Density Based Spatial Clustering of Applica-
tions with Noise (HDBSCAN) was also considered,
because it uses an approach where the ε value is not
required as a parameter and the clusters can have dif-
ferent densities. Both algorithms were experimented
with different configurations of the parameters to al-
low a more effective choice of clusters. Regarding
the values of MinPts, it was observed by visual anal-
ysis that, with the exception of ports, there were no
considerable areas with more than 100 intersections.
Therefore, this value was used as a maximum and the
MinPts was experimented with four values: 25, 50,
75 and 100. Regarding the values of ε for the DB-
SCAN, a maximum of 750 meters was defined and the
parameter was experimented with three values: 250,
500 and 750 meters. Notice that the algorithms were
applied individually for the AIS data of each day. To
choose the better algorithm and configuration the sil-
houette coefficient was applied to the retrieved clus-
ters, using an euclidean distance for the calculations.
The average coefficient results and standard devia-
tions are presented on Table 1 for the best four con-
figurations of both algorithms. The results show that
the HDBSCAN with MinPts = 75 was the configu-
ration with an higher silhouette coefficient average
IVAPP 2019 - 10th International Conference on Information Visualization Theory and Applications
212

while maintaining an acceptable standard deviation.
Therefore, it was chosen for the clusters extraction.
Table 1: Silhouette results for HDBSCAN and DBSCAN.
Algorithm MinPts ε Avg. Std.
HDBSCAN 75 NA 0.525 0.084
HDBSCAN 100 NA 0.507 0.081
DBSCAN 25 750 0.499 0.070
DBSCAN 75 750 0.473 0.077
Regarding the second step, the key idea was to as-
sociate a frequency to each cluster of each day. To
calculate this frequency (F
c
) the formula on Equation
1 was proposed.
F
c
=
Number of days where the cluster exists
Total number of days
(1)
Considering the necessary parameters for the formula
above, the total number of days with AIS data is a
known value but the number of days where each clus-
ter exists needs to be calculated. For this purpose a
new algorithm was developed that receives a cluster
from a day, the clusters of the remaining days and an
overlap threshold (between zero and one). The key
idea is to evaluate if the given cluster exists on other
days by calculating the area of intersection between it
and each of the remaining clusters. This area is then
converted to a percentage by dividing it with the area
of the given cluster, and if this percentage is greater
than the overlap threshold it is considered that the
cluster exists on the selected day. The overlap thresh-
old is important in this analysis because it is highly
unlikely that two clusters have the exact same shape,
which would be necessary for a degree of 100% of
overlap. Moreover, the goal is to identify if an area
that has an high density in one day also has it in other
days, and for that reason a total overlap is not required
since the same area may be within a bigger or smaller
cluster on others days. For these reasons, the value
of this threshold was defined as 50%. Notice that
this algorithm could use the overlap of each individ-
ual point from the clusters for the calculations, but
the required time for the algorithm to compute would
be unfeasible. Therefore, the area from the clusters
was considered to calculate the overlap, but this is not
an immediate operation. In this approach the area is
obtained from the convex hulls of the clusters points,
which are extracted using the Graham’s Scan algo-
rithm (Graham, 1972). The shape of the convex hull
adapts well to the clusters, because it considers all the
boundaries and is able to represent them without re-
strictions (being an irregular polygon, it can assume
any convex shape). Considering that the coordinates
from the vertices are known, the formula presented on
Equation 2 can be used to calculate the area. Notice
that the coordinates must be applied in counterclock-
wise order around the polygon, using the first point
also as the last one.
A
cp
=
1
2
n−1
∑
k=0
x
k
∗ y
k+1
− y
k
∗ x
k+1
(2)
With the frequency of each cluster calculated, the
third step was addressed by associating less common
clusters as more likely to include abnormal behaviors.
This concept has been used in other studies and re-
lies on the fact that an area where an higher density
of intersections is often found should be considered
less probable of being abnormal when compared to
one where this higher density happens as an excep-
tion. Therefore, the level of abnormality of each clus-
ter was calculated based on the frequency using the
formula on Equation 3.
AL
c
= 1 − F
c
(3)
Finally, addressing the fourth step, to visualize
these clusters the convex hulls are drawn on the plat-
form and the visual variable color was used for the
representation of the abnormality levels. These levels
were discretized into four intervals, namely [0, 0.25[,
[0.25, 0.50[, [0.50, 0.75[ and [0.75, 1]. A gradient of
the color red was created with four levels, each one
for a specific interval, where the first level (light red)
is the lowest and the fourth level (dark red) is the high-
est. The convex hull drawn for each cluster is filled
with the color that matches its interval of abnormal-
ity. Figure 6 shows an example with two areas drawn
on the platform. The one from the left has a lower
level of abnormality compared to the one on the right.
Figure 6: An example with two abnormal areas drawn on
the platform.
4 PROOF OF CONCEPT
The proposed approach was implemented in Java with
Processing 3 and tested with real data. An usage
example of the implementation is presented in the
following video: https://vimeo.com/304586547.
The used proprietary dataset has AIS data from the
Portuguese maritime zone collected between Febru-
ary 22 and March 12 of 2012. It contains positions for
A Data Visualization Approach for Intersection Analysis using AIS Data
213
the nine types of vessels available but with very un-
balanced quantities for each type, being these the pre-
dominant three: cargos with 52%, tankers with 21%
and special crafts with 8%. Analyzing the trajecto-
ries of the vessels, the following statistics can also be
obtained: the dataset contains a total of 9394 trajec-
tories, the average duration of a trajectory is 1.5 days
and the average number of trajectories by day is 1085.
Considering the 20 days of data available, each
day has an average of 6460 intersections. Figure
7 displays several AIS trajectories from vessels that
sailed through the main corridor of the Portuguese
maritime area on February 22 of 2012. These mar-
itime corridors are specific areas of the sea where the
vessels are supposed to sail, and the traffic density on
them is usually very high. The selected day has 4838
Figure 7: Visualization of several AIS trajectories.
intersections in a total of 86652 positions, which rep-
resents a ratio of 5.6%. Apparently the area marked
by the black square contains only cargo vessels (the
dark blue ones) and a fishing vessel (the green one).
Moreover, it appears that the fishing vessel may even-
tually intersect with several cargos. However, when
the intersections are activated and the fish-eye lens
is applied on the black square area with at least one
level of zoom, an unexpected intersection is revealed.
Figure 8 shows this intersection on the fish-eye lens
(left image) and on the detail lens (right image). The
Figure 8: Individual analysis of the intersection. On the
left the magnified fish-eye lens is applied. On the right the
intersection is isolated through the detail lens.
intersection between the fishing vessel and the pas-
sengers vessel (the yellow one) was hidden in the vi-
sual clutter created by the trajectories of the remain-
ing ones. Without the usage of the magnified fish-eye
lens it would be very difficult to detect and analyze
this intersection.
Fishing vessels can be particularly hard to analyze
considering that their trajectories are very irregular
when comparing, for example, with cargos or tankers.
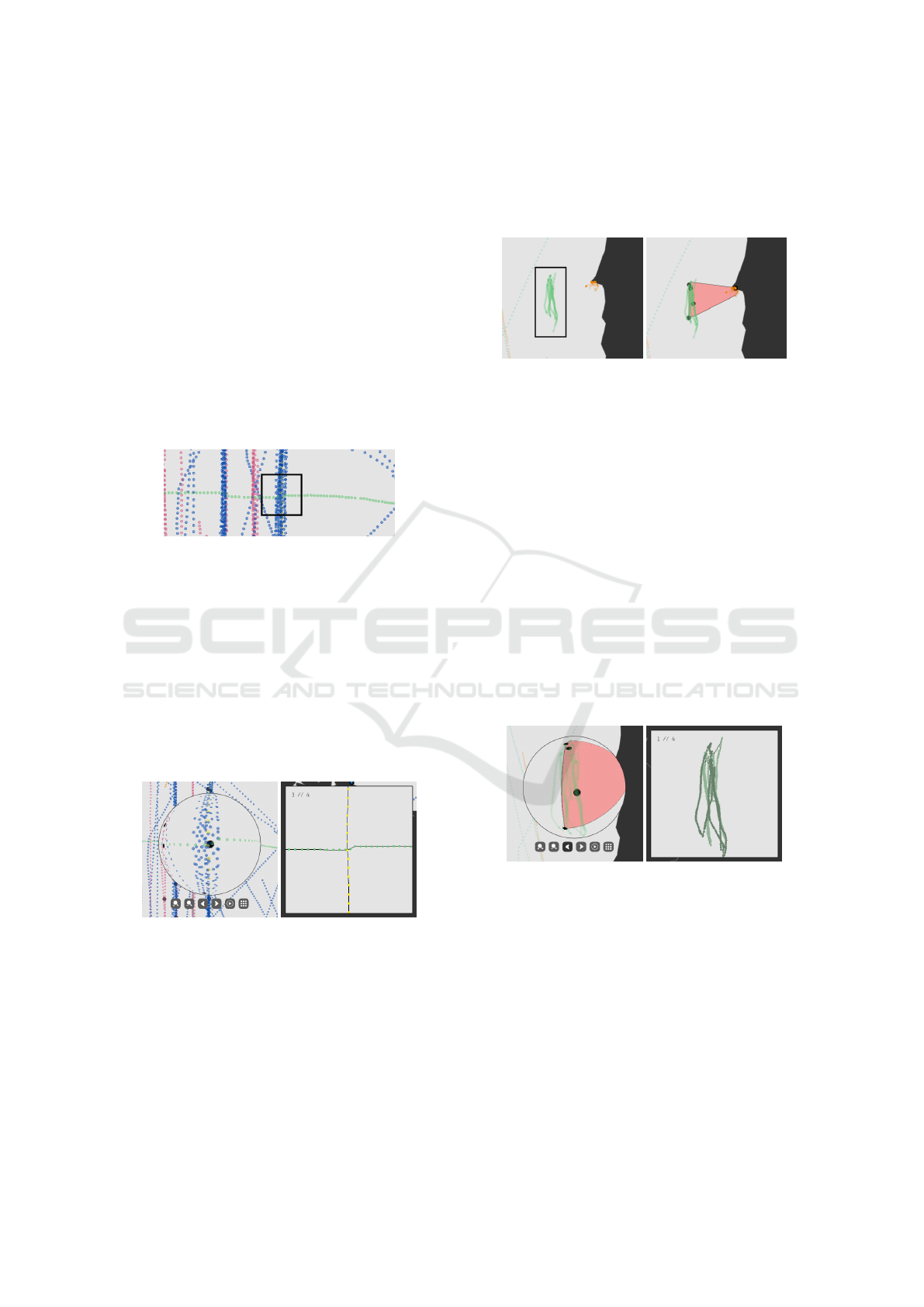
Figure 9 (left image) displays AIS trajectories from
March 10 of 2012. Notice that the cargos and tankers
were removed from the screen. The area marked by
Figure 9: On the left the visualization of the AIS fishing tra-
jectories. On the right the intersections and the high density
area of the same trajectories.
the black square on the Figure 9 appears to contain
a trajectory from a fishing vessel. However, when
the intersections are displayed, the screen shows that
there are more than one trajectory from fishing ves-
sels in that area and, more importantly, they intersect
in several points. Moreover, the area is considered
to have a high density of intersections and the red
color indicates that the level of abnormality is three
out of four. Figure 9 (right image) shows these inter-
sections and the high density area. When the fish-eye
lens is applied on the area the intersections are iso-
lated through the detail lens. Figure 10 shows all in-
tersections on the fish-eye lens (left image) and only
the first intersection on the detail lens (right image).
Notice that, being the two vessels from the same type,
each one is painted with a light or dark green. The an-
Figure 10: Detection and isolation of the first intersection.
On the left the magnified fish-eye lens is applied. On the
right the first intersection is isolated through the detail lens.
imation of trajectories was applied to the intersection
and, as Figure 11 shows, one of the vessels is always
following the other. This pattern could be an impor-
tant aspect to confirm or discard the behavior as sus-
picious. The speed of the vessels is more or less con-
stant with the exception of some turning points where
it decreases.
IVAPP 2019 - 10th International Conference on Information Visualization Theory and Applications
214

Figure 11: Three frames of the animation from the isolated
intersection.
5 CONCLUSIONS
This paper proposes the first approach that is focused
on analyzing intersections between vessels through
data processing and interactive visualization strate-
gies. The approach consists of several data processing
tasks that extract the intersections from the raw AIS
data, a visual search strategy based on a magnified
fish-eye lens, an animation strategy that allows an in-
dividual analysis of the trajectories and a visual selec-
tion method based on high density areas and their ab-
normality levels. The experiments showed that these
new strategies help on the detection and analysis of
intersections that otherwise would be hidden in the
visual clutter. In the future an aspect to explore is
the evaluation of the usability and efficiency of the
proposed strategies with real users, particularly with
domain experts, in order to understand if they have
difficulties during the process. Another direction to
explore is to obtain more AIS datasets, which will al-
low new experiments in other contexts.
REFERENCES
Altera (2008). A flexible architecture for fisheye correction
in automotive rear-view cameras. Technical report,
Altera Corporation.
Bertin, J. (1983). Semiology of Graphics: Diagrams, Net-
works, Maps. University of Wisconsin Press.
Bettonvil, F. (2005). Fisheye lenses. WGN, Journal of the
International Meteor Organization, 33:9–14.
Busler, J., Wehn, H., and Woodhouse, L. (2015). Track-
ing vessels to illegal pollutant discharges using multi-
source vessel information. The International Archives
of Photogrammetry, Remote Sensing and Spatial In-
formation Sciences, 40(7):927.
Chen, C., Wu, Q., Zhou, Y., and Mao, Z. (2016). Informa-
tion visualization of ais data. In Logistics, Informatics
and Service Sciences (LISS), 2016 International Con-
ference on, pages 1–8.
Fiorini, M., Capata, A., and Bloisi, D. D. (2016). Ais
data visualization for maritime spatial planning (msp).
International Journal of e-Navigation and Maritime
Economy, 5:45–60.
Gao, X. and Shiotani, S. (2013). An effective presentation
of navigation information for prevention of maritime
disaster using ais and 3d-gis. In Oceans-San Diego,
2013, pages 1–6.
Gonzalez, J., Battistello, G., Schmiegelt, P., and Biermann,
J. (2014). Semi-automatic extraction of ship lanes and
movement corridors from ais data. In Geoscience and
Remote Sensing Symposium (IGARSS), 2014 IEEE In-
ternational, pages 1847–1850.
Graham, R. L. (1972). An efficient algorith for determin-
ing the convex hull of a finite planar set. Information
processing letters, 1(4):132–133.
Handayani, D. O. D., Sediono, W., and Shah, A. (2013).
Anomaly detection in vessel tracking using support
vector machines (svms). In Advanced Computer Sci-
ence Applications and Technologies (ACSAT), 2013
International Conference on, pages 213–217.
Jiacai, P., Qingshan, J., Jinxing, H., and Zheping, S. (2012).
An ais data visualization model for assessing maritime
traffic situation and its applications. Procedia Engi-
neering, 29:365–369.
Pallotta, G., Vespe, M., and Bryan, K. (2013). Vessel pat-
tern knowledge discovery from ais data: A framework
for anomaly detection and route prediction. Entropy,
15(6):2218–2245.
Riveiro, M. and Falkman, G. (2009). Interactive visualiza-
tion of normal behavioral models and expert rules for
maritime anomaly detection. In Computer Graphics,
Imaging and Visualization, 2009. CGIV’09. Sixth In-
ternational Conference on, pages 459–466.
Sang, L.-Z., Yan, X.-P., Mao, Z., and Ma, F. (2012). Restor-
ing method of vessel track based on ais information.
In Distributed Computing and Applications to Busi-
ness, Engineering & Science (DCABES), 2012 11th
International Symposium on, pages 336–340.
Sang, L.-z., Yan, X.-p., Wall, A., Wang, J., and Mao, Z.
(2016). Cpa calculation method based on ais position
prediction. The Journal of Navigation, 69(6):1409–
1426.
Soleimani, B. H., De Souza, E. N., Hilliard, C., and Matwin,
S. (2015). Anomaly detection in maritime data based
on geometrical analysis of trajectories. In Information
Fusion (Fusion), 2015 18th International Conference
on, pages 1100–1105.
Tetreault, B. J. (2005). Use of the automatic identification
system (ais) for maritime domain awareness (mda).
In OCEANS, 2005. Proceedings of MTS/IEEE, pages
1590–1594.
Willems, N., Van De Wetering, H., and Van Wijk, J. J.
(2009). Visualization of vessel movements. In Com-
puter Graphics Forum, volume 28, pages 959–966.
Xu, W., Zhong, D., Wu, S., and Ni, H. (2015). A track
fusion method of a vessel. In Sixth International Con-
ference on Electronics and Information Engineering,
volume 9794, page 97941E.
Zhang, D., Li, J., Wu, Q., Liu, X., Chu, X., and He, W.
(2017). Enhance the ais data availability by screening
and interpolation. In Transportation Information and
Safety (ICTIS), 2017 4th International Conference on,
pages 981–986.
A Data Visualization Approach for Intersection Analysis using AIS Data
215
