
Gaussian Curvature Criterion based Random Sample Matching for
Improved 3D Registration
Faisal Azhar, Stephen Pollard and Guy Ad ams
HP Labs, Bristol, U.K.
Keywords:
Gaussian Curvature, 3D Registration, Matching, Point Cloud, Hash Table.
Abstract:
We propose a novel Gaussian Curvature (GC) based criterion to discard false point correspondences within the
RANdom SAmple Matching (RANSAM) framework to improve the 3D registration. The RANSAM method
is used to find a point pair correspondence match between two surfaces and GC is used to verify whether this
point pair is a correct (similar curvatures) or false (dissimilar curvatures) match. The point pairs which pass
the curvature t est are used to compute a transformation which aligns the two overlapping surfaces. The results
on shape alignment benchmarks show improved accuracy of the GRANSAM versus RANSAM and six other
registration methods while maintaining efficiency.
1 INTRODUCTION
Three-dimensional (3D) point cloud registration is
used to align CAD o r full 3D scans with partial
scan to perform robotic bin picking, 2D and 3D in-
spection or authentication, and full 3D scene recon-
struction. Partial views, clutter, illumination varia-
tion and noise in scan from the 3D sensor present a
significant c hallenge to any 3D registration approach.
Hence, Random Sample Consensus (RANSAC) (Fis-
chler and Bolles, 1981) model fitting schem e , which
finds a small nu mber of correct point corresponden-
ces to align the scene to th e model, is often used as a
standard approach to deal with such challenges. In ad-
dition, extra geometric features or descriptors (invari-
ant under rigid transformation) are used in the RAN-
SAC scheme to prune out mismatc hed points in a ma-
tching and registration scenario. Such geometric fe-
atures often re quire computationally expensive accu-
mulation or differientiation of local info rmation, e. g.,
volumetric invariant (Gelfand et al., 2005), mean cur-
vature, G aussian curvature (GC), etc (Besl and Jain,
1986). Hence, we are mo tivated to propose a sim-
ple and e asy imp le mentation of a Gaussian curvature
check in RANSAM (Winkelbach et al., 2006) frame-
work to prune misma tc hed points in order to improve
accuracy and maintain efficiency of 3D registration.
We show that an efficiently computed GC descriptor
used for pruning can bring improvement to the exi-
siting RANSAM approach. However, comparison of
different geometric descriptors is not within the scope
of this paper.
The key observation is that Gaussian curvature
provides a simple but powerful descriptor, so that
points with different curvatures are unlikely to contri-
bute to a correct correspondence, and thus can be d is-
carded. We evaluate this idea on a number of shape
alignment benchmarks and show improvement over
several of them. The main contribution of our work is
the inclusion of the discrete Gaussian cu rvature check
into the RANSAM framework for discarding un likely
feature point corresp ondence s during the shape align-
ment. The advantages o f our approach are: (a) impro-
vement in accuracy, (b) minimal computational cost
and (c) simple and easy integration into existing re-
gistration approaches.
This paper is organised as f ollows. Section 2
presents literature review. Section 3 presents our
GRANSAM method. Sec tion 4 co mpares the perfor-
mance of the GRANSAM with RANSAM and six ot-
her global registration metho ds. Section 5 concludes
the paper.
2 RELATED WORK
Most popular 3D feature descriptors include point fe-
ature histogram (PFH) (Rusu et al., 2008), fast point
feature histogram (FPFH) (Rusu et al., 2009), signa-
ture of histogram of orien ta tions (SHOT) (Tombari
et al., 2010) , etc. RANSAC is used to repeated ly es-
Azhar, F., Pollard, S. and Adams, G.
Gaussian Curvature Criterion based Random Sample Matching for Improved 3D Registration.
DOI: 10.5220/0007343403190325
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 319-325
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
319
timate an alignment f or a randomly chosen subset of
correspo ndences which is validated on the entire or
subset point cloud. PCL (Holz et al., 2015; Rusu
et al., 2009) is the sample co nsensus initial align-
ment algorithm, from the Point Cloud Library, which
uses histogram o f point pair featu res, i.e., FPFH, to
obtain a global registration. CZK (Choi et al., 2015)
is a method which combines geometric registration
of scene fragments with ro bust global optimization
based on line processes for 3D scene reconstruction.
Noisy data and partially overlapping point clouds cre-
ate a significant problem to these methods because
they require many r e petitions to find a go od point cor-
respond ence set. In contrast, the FGR (Zhou et al. ,
2016) method uses a fixed subset of corresponding
points, some cor rect and some not, which are con-
sidered together. It aims to iterate towards a solution
that selects the c orrect point matches while discarding
the noise using a German McClure objective func tion
within a grad uated non-convexity framework. The
MFR method in (Faisal Azhar and Adams, 2019)
builds upon FGR method but uses weighted median
in a re-weighted least squares approac h with gradua-
ted M-Estimation to rapidly converge to optimal re-
gistration. These me thods may totally fail to align e n-
gineering parts (with sig nificant planar surfaces) be-
cause of lack of unique local features and do not al-
ways perform well w ith different v iews of more gene-
ral (non-planar surfaces) parts because the descriptor
based matching does not always find good point cor-
respond ence match suitable for 3D registration. Re-
cently, (Rantoson et al., 201 6) introduced registration
which uses Gaussian curvature constrain t on the rand-
omly sampled point pair matches to impr ove registra-
tion. This method uses DARCES algorithm, which is
a computation a lly expensive procedure, to randomly
compare three scene points to all the points in the mo-
del to find point ma tc hes. Also, redundant compari-
sons migh t produce many bad matches in the initial
step which can not be resolved using Gaussian cur-
vature con stra int in a later step. Also, it uses com-
putationally expensive Eigen value decomposition to
compute the Gaussian curvature.
Super4PCS (Mellado et al., 2014) is a n optimal
linear time output-sensitive algorithm which uses an
efficient data struc ture to obtain a global alignment.
OpenCV ( D rost et al., 2010) provides a surface regis-
tration algorithm wh ic h uses point pair features with
hash table lookup and voting with p ose clustering to
obtain a global registration. The RANSAM method
(Winkelbach et al., 2006) uses a point pair feature
with hash tables to compute an initial alignment. We
are motivated by the RANSAM approach but additi-
onally use a surface curvature test to prune early the
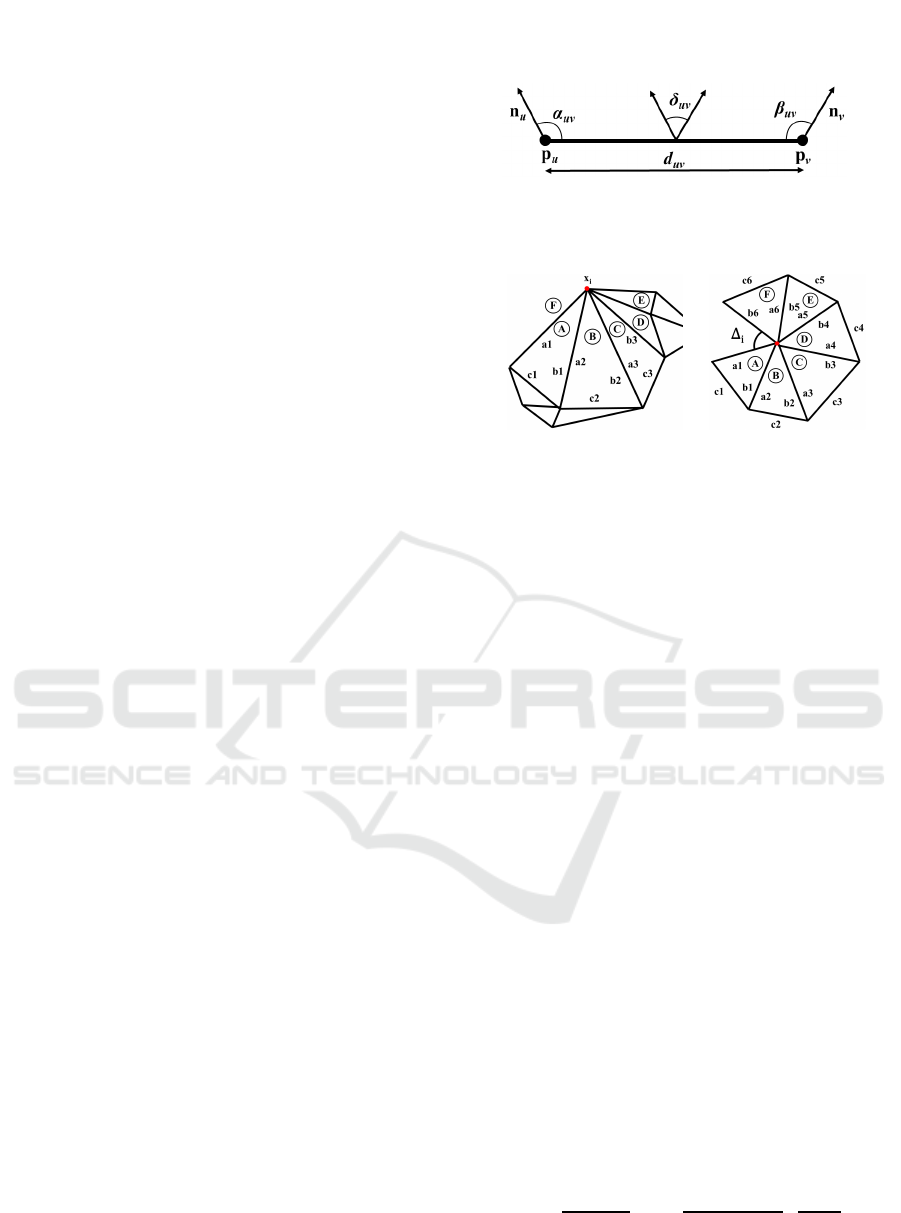
Figure 1: Illustration of 4D (α
uv
,β
uv
,δ
uv
,d
uv
,) relation fe-
atures for a point pair p
u
and p
v
.
(a) (b)
Figure 2: Efficient Gaussian curvature from discrete trian-
gularization of the mesh. ∆
i
is the angle deficit computed
using the length a
i
,b
i
,c
i
of the sides of the i
th
triangle. (a)
3D view and (b) planar view.
potential point pair hits in the hash table which im-
proves robustness (see Section 3.1).
3 MATHEMATICAL DETAIL
Let P
A
= [p
1
,..., p
k
] and N
A
= [n
1
,...,n
k
] be 3D points
and corresponding surface normals of a surface A re-
spectively. The combination of point with normal is
referred as an oriented point (see 1). L et the set of
oriented points A of surface A and oriented points B
of surface B be
A
:
=
u = [p
u
,n
u
]|p
u
∈P
A
and n
u
∈ N
A
B
:
=
v = [p
v
,n
v
]|p
v
∈ P
B
and n
v
∈N
B
(1)
Consider pairs of candidate matching points a,c ∈
A and b,d ∈ B, two pre-defined frames ca n be used
to determine a homogeneo us 4 × 4 transformation
T = [R
3×3
t
3×1
; 0
1×3
1]
that optima lly and
robustly aligns the dipoles (a,c) and (b,d) such that
T = F(a,c)
−1
.F(b,d) (2)
where the function F(u,v) or F represents a coordi-
nate system lying between oriented points u and v
F
:
=
p
uv
×n
uv
kp
uv
×n
uv
k
p
uv
p
uv
×n
uv
×p
uv
kp
uv
×n
uv
×p
uv
k
p
u
+p
v
2
0 0 0 1
(3)
where p
uv
=
(p
v
−p
u
)
/kp
v
−p
u
k and n
uv
= n
u
+n
u
. Singu-
lar frames are avoided by ensuring the length of p
uv
and n
uv
is not zero.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
320

3.1 GRANSAM
Gaussian curvature is an intrinsic surface property,
i.e., isometrically invariant under rigid transformation
(Besl and Jain, 1986). The standard Gaussian cur-
vature computation (with der ivatives) over the mesh
requires computationally expensive per vertex local
neighbourho od operations such as Eigen value de-
composition of the covariance matrix (Besl and Jain,
1986; Rantoson et al., 2016). Instead, w e use discrete
triangularization of the surface to efficiently compute
Gaussian curvature over the mesh (Besl and Jain,
1986). Consider a point x
i
(Red circle) on the mesh
which is a vertex for N different triangles as shown
in the Figure 2. The Gaussian curvature for a point x
i
can be co mputed as
K(x
i
) =
2π −
∑
N
i=1
∆
i
∑
N
i=1
Λ
i
(4)
where Λ
i
=
p
s(s −a
i
)(s −b
i
)(s −c
i
) is th e area of
triangle, with semiperimeter s =
a
i
+b
i
+c
i
/2, ∆
i
is the
angle deficit
∆
i
= arccos
a
2
i
+ b
2
i
−c
2
i
2a
i
b
i
(5)
and a
i
,b
i
,c
i
are the leng th of the sides of the i
th
tri-
angle. In practise, we use an approximated Gaussian
curvature as
K(x
i
) = 2π−
N
∑
i=1
∆
i
(6)
Our GRANSAM uses the same 4D relation table
as used in RANSAM (Winkelbach et al., 2006) con-
sisting of the Euclidean distance d
uv
between points,
the angle of inclination α
uv
and β
uv
between the nor-
mals n
u
and n
v
, the line connecting p
u
and p
v
, and
the rotation angle δ
uv
between the normals around the
connection line as shown in Figure 1. The rel(u,v) or
rel is computed as
rel
:
=
d
uv
cosα
uv
cosβ
uv
δ
uv
=
kp
v
− p
u
k
n
u
· p
uv
n
v
· p
uv
tan
−1
(
n
u
·(p
uv
×n
v
)
(n
u
×p
uv
)·(p
uv
×n
v
)
)
(7)
We also use the same match quality metric Ω as
used by RANSAM (Winkelbach et al., 2006) to eva-
luate the transformation T computed using the pair of
matches,
Ω =
∑
k
u,v=1
(
1 minkTp
u
− p
v
k < ε
0 else
k
+
1.96
2
√
k
(8)
Algorithm 1: Our GRANSAM method.
Input:
Set of oriented po ints A of surface A and oriented
points B of surface B.
Threshold ξ=0.1.
Output: Transformation matrix T which aligns A to
B.
1. Compute Gaussian curvature K for surface A and
B using Equation 6.
2. Random ly choose or iented point pair a,c ∈A and
calculate rel(a,c) using Equation 7.
3. Insert it into the relation table for surface A: suc h
as R
A
[rel(a,c)] = (a, c).
4. Read the same position in the relation table for
surface B: (b,d) = R
B
[rel(a,c)].
5. If entry exists, verify if |K(a) −K(b)| < ξ and
|K(c) −K(d)| < ξ then compute T for (a, b,c, d)
using Equatio n 2 and 3, and estimate match qua-
lity Ω using Equation 8.
6. Random ly choose orien te d point pair b,d ∈ B and
calculate rel(b,d) using E quation 7.
7. Insert it into the relation table for surface B: such
as R
B
[rel(b,d)] = (b,d).
8. Read the same position in the relation table for
surface A: (a, c) = R
A
[rel(b,d)].
9. If entry exists, verify if |K(a) −K(b)| < ξ and
|K(c) −K(d)| < ξ then compute T for (a, b,c, d)
using Equatio n 2 and 3, and estimate match qua-
lity using Equation 8.
10. Repeat steps 2-9 until ma tc h quality is good
enoug h or iteration limit is exceeds.
where k is the numb er of points, subscript u = 1,..., k
and v = 1,...,k. (see our Algorithm 1)
4 EXPERIMENTAL RESULTS
We have conducted a series of experim e nts to com-
pare the performance of our GRANSAM method
against state-of-the-art globa l registration methods
RANSAM, FGR and MFR on two real world data
sets, i.e., our 3D printed part dataset and the publi-
cly available UWA be nchmark dataset (Mian et al.,
2006). Synthe tic experiments have not been conside-
red as 3D registration m ethods operating well on si-
mulated da ta set do not necessarily perform well on
real world dataset. Our 3D printed part dataset is
used to test the performance of 3D registration m e t-
hods to align individual views of a single part to a
referenc e multi-v iew mode l or CAD model. It con-
tains partial v iews of challenging engineer ing parts
with pla nar surfaces. The UWA dataset tests the abi-
lity to deal with multiple objects, c lutter, occ lusion
Gaussian Curvature Criterion based Random Sample Matching for Improved 3D Registration
321
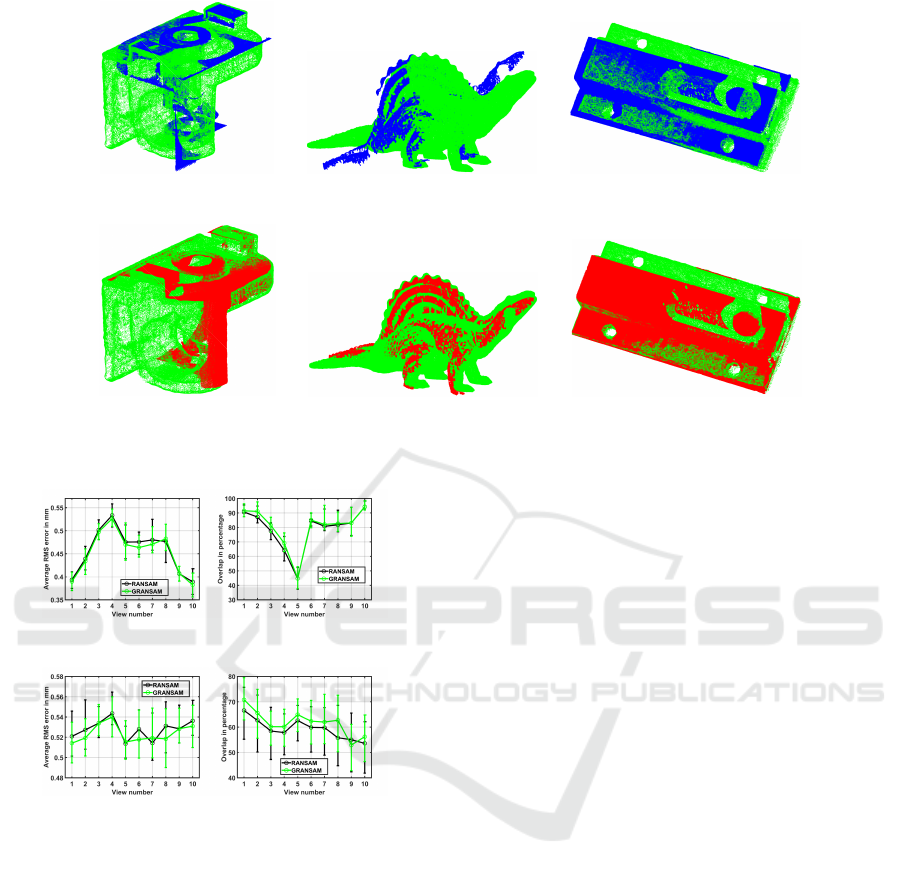
(a) (b) (c)
(d) (e) (f)
Figure 3: RANSAM (Blue points) versus GRANSAM (Red points) registration on model (Green points). (a, b, c) v.s (d, e, f)
for Extruder, Dinosaur and Slide lock respectively. Note misalignment in top versus bottom row (zoom in PDF t o see detail).
(a) (b)
(c) (d)
Figure 4: RANSAM (Black line) versus GRANSAM
(Green line) 3D registration on Extruder (top row) and
Bunny ( bottom row). (a)-(c) RMS point-to-point error in
mm and (b)-(d) corresponding overlap in percentage.
and low overlap. Our GRANSAM method which
outperforms FGR an d MFR can also be considered
to surpass the performance of six other global regis-
tration methods (termed as Go ICP, GoICP-Trim, Su-
per4PCS, OpenCV PCL and CZK).
4.1 3D Printed Part Dataset
This dataset consists of six models (Extruder, Dino-
saur, Slide lock, Bunny, Focus housing and Camera
mount) wh ic h a re captured from 10 different views,
i.e., a total of 60 scans for testing GRANSAM versus
RANSAM r egistration. The Figure 3 shows the accu-
rate GRANSAM (Red points) registration versus mi-
saligned RANSAM (Blue points) registration on mo-
del (Green points). In our experiments, GRANSAM’s
Gaussian curvature pruning consistently obtained bet-
ter registration than RANSAM.
We applied the GRANSAM and RANSAM met-
hod 1 00 times on the 3D printed part dataset to
compute the average RMS error, overlap percen-
tage, and computational time score. We use a thres-
hold of 1 mm to compute the RMS error and over-
lap percenta ge. The Figu re 4 shows the reduced
average RMS and increased overlap in percentage o f
the GRANSAM versus RANSAM along with 25
th
and 75
th
percentiles of the population (wh ich are
shown as vertical bars) for each view of the Ex tru-
der and Bunny. GRANSAM’s considerable impro-
vement over RANSAM can be seen in cer ta in views,
for example, view 2, 3, 4 of the E xtruder ha s r e du-
ced RMS error with up to 4.5% increase in overlap
and view 1, 2, 8 of the Bunny has reduced RMS
error with up to 12.5% in c rease in overlap. In our
experiments, th e reduction in RMS error and impro-
vement in overlap perce ntage was observed in many
views of the 3D printed part dataset. Note that as ex-
pected GRANSAM performance was better for ob-
jects with r ough surface or crest and trough and was
not improved for objects with planar surface. Ho-
wever, there are numerous real world shapes which
have sufficient su rface curvature where GRANSAM’s
Gaussian curvature ba sed pruning will benefit any re-
gistration scheme.
In Table 1, we summarize the average RMS er-
ror in mm and overlap in percentage across all views
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
322
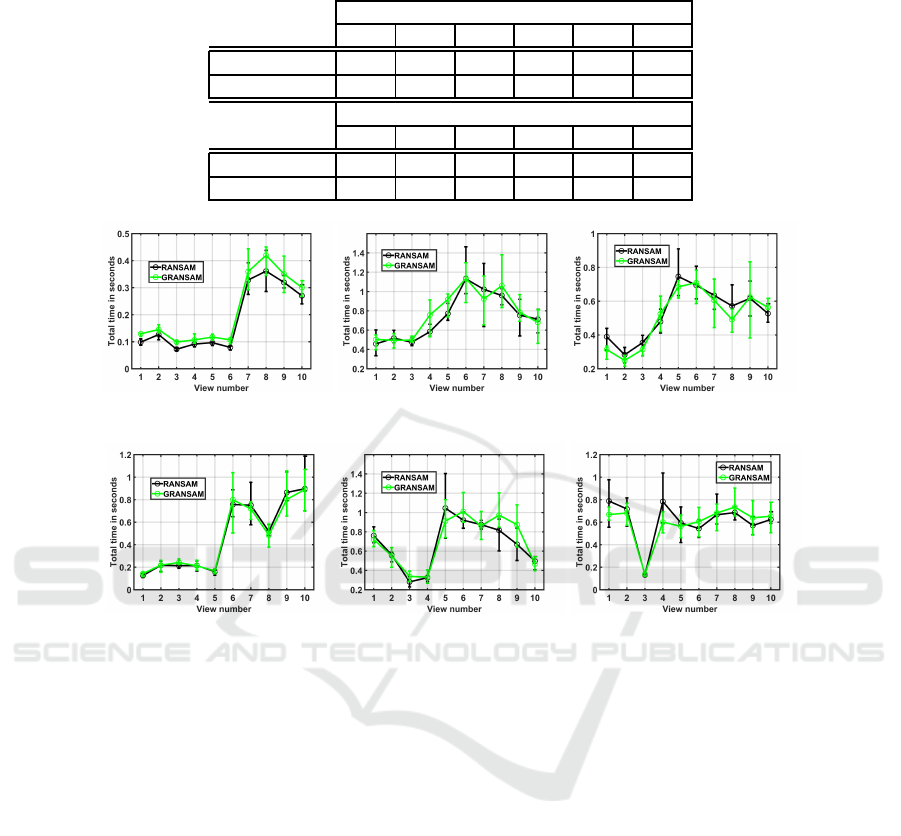
Table 1: Average across all views of the 3D printed part dataset: (1) Extruder, (2) Bunny, (3) Camera mount, (4) Dinosaur,
(5) Focus housing, (6) Slide lock. Bold shows winner per category.
RMS error in mm
1 2 3 4 5 6
RANSAM 0.46 0.42 0.21 0.53 0.26 0.37
GRANSAM 0.45 0.41 0.21 0.52 0.25 0.36
Overlap in percentage
1 2 3 4 5 6
RANSAM 78.8 69.5 96.1 59.2 96.2 82.9
GRANSAM 80.5 69.6 96.3 61.8 96.5 83.1
(a) (b) (c)
(d) (e) (f)
Figure 5: Comparison of the computational time in seconds for 3D registration obtained using RANSAM (Black line) and
GRANSAM (Green line). (a) Extruder, (b) Bunny, (c) Camera mount, (d) Dinosaur, (e) Focus housing and (f ) Slide Lock.
of the 3D printed part dataset using RANSAM and
GRANSAM. The Figure 3, 4 and Table 1 show that
our GRANSAM obtains more consistent registration
than RANSAM.
Figure 5 shows that GRANSAM (Green line) has
similar computational time as RANSAM (Black line)
on the 3D printed dataset for a maximum of 5 000
iterations per r un. GRANSAM introduces minima l
computational cost of up to 0.1 seconds (the cost of
pre-computing the Gaussian curvature is very small,
i.e., 1-10 m illiseconds).
4.2 UWA Benchmark Dataset
This dataset consists of four models (Cheff, Chicken,
Parasaurolophus, T-rex) w ith 50 scenes of m ultiple
objects, i.e., all f our objects are present in most of
the scenes. Similar to (Zhou et al., 2016), a total of
188 model and scene pairs for testing registration. It
is a challenging data set due to clutter, occlu sio n and
low overlap between model an d scene.
The Figure 6 shows the GRANSAM (Red
points) registration versus misalign ed RANSAM
(Blue points) on model ( Green points). It can be
seen in Figure 6a-6b versus 6d-6e that RANSAM fails
while GRANSAM correctly aligns the scene to the
model.
In Figure 7, we summarize the average RMS er-
ror and overlap percentage across the 188 pairwise
registration of the UWA dataset using FGR, MFR,
RANSAM and GRANSAM method. It can be seen
from Figure 7a that on average our GRANSAM met-
hod obtains a lower RMS error than FGR, MFR and
RANSAM methods while maintain ing good overlap
percentage as shown in Figure 7b.
Table 2 summarizes the percenta ge reduction in
RMS error using GRANSAM versus other methods
on UWA dataset. Note that on average GRANSAM
has a 37.73%, 37.03%, 7.84% reduction in RMS error
versus FGR, MFR and RANSAM method re specti-
vely. Hence, GRANSAM is able to deal with low
overlap, m ultiple objects and high occlusion UWA da-
Gaussian Curvature Criterion based Random Sample Matching for Improved 3D Registration
323
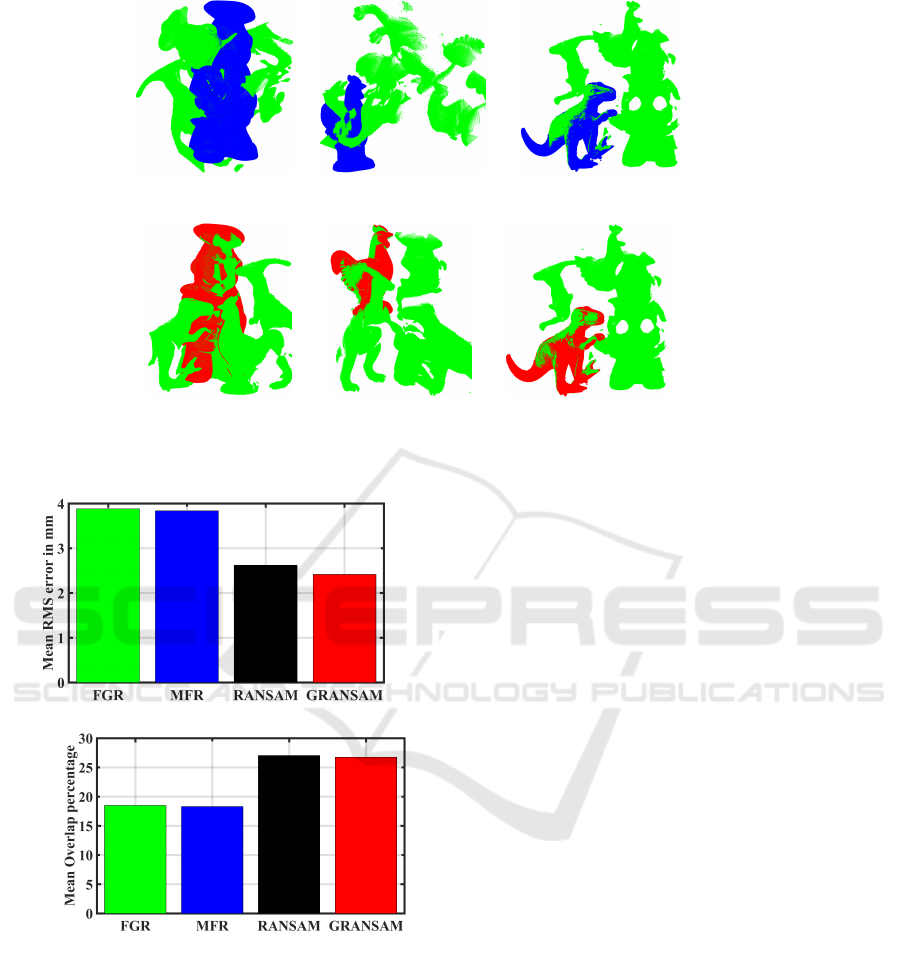
(a) (b) (c)
(d) (e) (f)
Figure 6: RANSAM (Blue points) versus GRANSAM (Red points) registration on model (Green points). Cheff, Chicken and
T-rex left-to-right. Note misalignment i n top versus bottom row (zoom in PDF to see detail).
(a)
-4pt]
(b)
Figure 7: GR A NSAM versus FGR, MFR, and RANSAM
3D registration on UWA dataset. (a) Mean RMS error and
(b) mean overlap percentage.
taset and also surpasses the performance of six global
registration methods (termed as GoICP, GoICP-Trim,
Super4PCS, OpenCV PCL and CZK).
4.3 Computational Speed
GRANSAM has a low complexity of O(k) (Winkel-
bach et al., 2006). The computational time was me-
asured in the Microsof t Visual Studio 2015 on a HP
Z mobile work statio n with an Intel i7 2.66 GHz pro-
cessor with 16 GB RAM. GRANSAM and RANSAM
both take in total about 3-6 seconds to compute the 3D
registration between a scene and m odel. In contrast,
the descriptor based FGR and MFR metho ds take in
total about 30 seconds to a few minutes to compute
the 3D registration depending on the nu mber of points
in the scene and mode l.
5 CONCLUSION
We have pre sented a discrete Gaussian cu rva-
ture criterion based RANdom SAmple Ma tc hing
(RANSAM) method to remove false matches to im-
prove the accuracy of 3D registration while maintai-
ning efficiency. The main novelty of our work is the
inclusion of Gaussian curvature check to prune out
mismatched point cor responde nces during sh ape alig-
nment within the RANSAM framework. We avoid
geometric features requiring computationally expen-
sive accumulatio n or differentiation of loc a l infor-
mation and show that a simple and efficient discrete
Gaussian curvature feature provide s a powerful and
easy to integrate descriptor to improve any 3D regis-
tration approach. The results on a numbe r of shape
alignment benchmar k showed the considerable im-
provement in 3D r egistration by using the Gaussian
curvature criterion .
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
324

Table 2: Percentage reduction in RMS error of GRANSAM
versus other methods on UWA dataset.
FGR MFR RANSAM
GRANSAM 37.7 3 37.03 7.84
REFERENCES
Besl, P. J. and Jain, R. C. (1986). Invariant surface characte-
ristics for 3d object recognition in range images. Com-
puter Vision, Graphics, and Image Processing, 33:33–
80.
Choi, S., Zhou, Q.-Y., and Koltun, V. (2015). Robust re-
construction of indoor scenes. In CVPR, pages 5556–
5565.
Drost, B., Ulrich, M., Navab, N., and Ilic, S. (2010). Model
globally, match locally: Efficient and robust 3d object
recognition. In IEEE Conference on Computer Vision
and Pattern Recognition, pages 998–1005.
Faisal Azhar, S. P. and Adams, G. (2019). Modified
m-estimation for fast global registration of 3d point
clouds. In Electronic Imaging.
Fischler, M. A. and Bolles, R. (1981). Random sample con-
sensus: A paradigm for model fitting with applications
to image analysis and automated cartography. ACM
Commun., 24(6):381–395.
Gelfand, N., Mitra, N. J., G uibas, L. J., and Pottmann, H.
(2005). Robust global registration. In Proceedings
of the Third Eurographics Symposium on Geometry
Processing. Eurographics Association.
Holz, D., Ichim, A. E., Tombari, F., Rusu, R. B., and
Behnke, S. (2015). Registration with the point cloud
library: A modular framework for aligning in 3-d.
IEEE Robotics Automation Magazine, 22(4):110–124.
Mellado, N., Aiger, D., and Mitra, N . J. ( 2014). Super 4pcs
fast global pointcloud registration via smart indexing.
Comput. Graph. Forum, 33:205–215.
Mian, A. S., Bennamoun, M., and Owens, R. (2006). Three-
dimensional model-based object recognition and seg-
mentation in cluttered scenes. IEEE Trans. Pattern
Anal. Mach. Intell., 28:1584–1601.
Rantoson, R., Nouira, H., Anwer, N., and Mehdi-Souzani,
C. (2016). Improved curvature-based registration met-
hods for high-precision dimensional metrology. Pre-
cision Engineering, 46:232 – 242.
Rusu, R. B., Blodow, N., and Beetz, M. (2009). Fast point
feature histograms (fpfh) for 3d registration. In Pro-
ceedings of IEEE International Conference on Robo-
tics and Automation, pages 1848–1853.
Rusu, R . B., Blodow, N., Marton, Z. C., and Beetz, M.
(2008). Aligning point cloud views using persis-
tent feature histograms. In Proceedings of the 21st
IEEE/RSJ International Conference on Intelligent Ro-
bots and Systems.
Tombari, F., Salti, S., and Di Stefano, L. (2010). Uni-
que signatures of histograms for local surface descrip-
tion. In Proceedings of the 11th European Conference
on Computer Vision Conference on Computer Vision:
Part III, ECCV’10, pages 356–369.
Winkelbach, S., Molkenstruck, S., and Wahl, F. M. (2006).
Low-cost laser range scanner and fast surface regis-
tration approach. In Pattern Recognition, pages 718–
728.
Zhou, Q.-Y., Park, J., and Koltun, V. (2016). Fast global
registration. In ECCV, pages 766–782.
Gaussian Curvature Criterion based Random Sample Matching for Improved 3D Registration
325
