
Uncertainty-aware Prediction in Spatio-temporal Simulation Ensemble
Visualizations
Marina Evers and Lars Linsen
Westf
¨
alische Wilhelms-Universit
¨
at M
¨
unster, Germany
Keywords:
Uncertainty Visualization, Ensemble Visualization, Parameter-Space Visualization, Volume Visualization.
Abstract:
Spatio-temporal simulation ensembles are used to investigate the dependence of the simulation behavior on
input parameters. Running simulations for a large number of input parameter settings is computationally ex-
pensive. We propose a scheme for exploring the parameter space using predictions of simulation outcomes and
estimating the uncertainty in the predictions. The prediction approximates the simulation result by interpolat-
ing feature vectors of existing runs. The feature vectors are used to compute similarities between simulation
runs facilitating visualization of the entire ensemble within a 2D (or 1D-over-time) multi-dimensional scaling
embedding. Uncertainties of the prediction are computed based on distance, interpolation and diversity, which
are visually encoded by an uncertainty band in the embedding. To guide the user to choose suitable parameter
settings for prediction, we also propose a parameter-space visualization of the uncertainty. The approach is
applied to real-world data simulating deep-water impact of asteroids.
1 INTRODUCTION
Spatio-temporal ensemble visualizations are common
in many areas of science like physics or geography.
These simulations typically depend on initial condi-
tions or input parameters. To understand the depen-
dence of the simulation result on the initial parame-
ters, it is commonly necessary to create an ensemble
including various simulation runs.
Visualizing an ensemble comes with the challenge
of handling large amounts of data and establishing a
visual encoding that allows for the comparative analy-
sis of simulation runs. Another challenge inherent to
ensembles is to determine, which parameter settings
to choose for desirable simulation outcomes. We pro-
pose an approach that facilitates the analysis of the pa-
rameter space of spatio-temporal simulation ensem-
bles by predicting simulation outcomes of new pa-
rameter settings from existing ones. The method is
computationally inexpensive as it is based on the in-
terpolation of feature vectors, see Section 4. The pre-
dicted result is visualized within the embedding pro-
posed by Fofonov et al. (Fofonov et al., 2016), see
Section 3.
It is important to visually convey how good we
expect the prediction to be. Thus, we compute the
uncertainty of the prediction based on multiple fac-
tors such as distance to existing settings in the pa-
rameter space, the uncertainty introduced by the in-
terpolation scheme, and the diversity of the existing
results used for interpolation, see Section 5. We vi-
sualize the uncertainty in the form of an uncertainty
band in the embedding. Moreover, we visualize the
uncertainty of possible predictions in the parameter
space, which facilitates choosing suitable parameter
settings for prediction (and eventually for running the
actual simulation) in the sense of computational steer-
ing, see Section 6.
We apply our approach within a real-world sce-
nario of investigating the influence of multiple input
parameters on the result of an ensemble of deep water
impact by asteroid simulations, see Section 7.
2 RELATED WORK
Many visualization approaches for spatio-temporal
simulation ensembles display statistical information
such as mean or variance of the ensemble (Potter
et al., 2009) (Sanyal et al., 2010), which does not sup-
port the comparative analysis of individual simulation
runs nor the analysis of the influence of simulation pa-
rameters. Phadke et al. (Phadke et al., 2012) proposed
techniques to explore and compare ensemble mem-
bers, but they are limited to small numbers. Fofonov
et al. (Fofonov et al., 2016) introduced the concept
216
Evers, M. and Linsen, L.
Uncertainty-aware Prediction in Spatio-temporal Simulation Ensemble Visualizations.
DOI: 10.5220/0007344702160224
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 216-224
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

of multi-run plots that allows for visualizing simulta-
neously the temporal evolution of all simulation runs
within an ensemble. We will build upon this idea, see
Section 3. Applications of the multi-run plot include
the visual representation of ensembles to detect pat-
terns and outliers (Fofonov and Linsen, 2018a). Our
goal is to predict the outcome of new simulation runs
and determine their uncertainty. Fofonov et al. nei-
ther provide information beyond the scope of the sim-
ulated run nor do they support choosing parameters
for further simulation runs. Different tools for compu-
tational steering exist in the analysis of ensemble data
such as World Lines (Waser et al., 2010) and ComVis
(Matkovic et al., 2008). Splechtna et al. (Splechtna
et al., 2015) introduced an interactive visual analy-
sis with hierarchical steering that supports multi-level
simulation models. However, these approaches are
only applicable if the computation of a simulation run
does not take too much time.
To obtain a better understanding of the relation-
ship between the parameter space and the target space
in an interactive setting, Berger et al. (Berger et al.,
2011) proposed a method using statistical learning to
predict further results and apply it to car engine de-
sign. In the following years, Sedlmair et al. (Sedlmair
et al., 2014) provided an abstract conceptual frame-
work. Potter et al. (Potter et al., 2017) proposed an
ensemble steering framework similar to the concep-
tional framework that uses approximations of simu-
lations based on machine learning to explore, design,
and plan energy systems. They also mention the pos-
sibility of a later simulation to eventually produce
a more accurate result. None of the mentioned ap-
proaches for parameter space visualization deals with
multi-run spatio-temporal simulation ensembles that
are common for physical simulations, which is what
we are addressing in this paper.
Recently, there has been active research on the vi-
sualization of uncertainty, cf. (Pang et al., 1997) (Gri-
ethe and Schumann, 2006) (Potter et al., 2012) (Liu
et al., 2017)(Rhodes et al., 2003)(Xie et al., 2015).
Some of them are within the context of simulation
ensembles such as Noodles (Sanyal et al., 2010) or
EnsembleVis (Potter et al., 2009) for analyzing the
associated uncertainty in the data. Both tools as-
sign the uncertainty by computing the standard de-
viation (or variance) to the means using statistically
pre-processed data. We, instead, propose novel ap-
proaches for estimating uncertainty in the parameter
space and respective visualizations and for prediction
outcomes in the embedded space.
3 BACKGROUND
Multi-run Plot. Our approach is based on the visual
representation of the simulation ensemble within an
embedding as proposed by Fofonov et al. (Fofonov
et al., 2016). Each simulation run is depicted as a
curve parametrized over time, where positions on the
curve reflect similarities of the time steps of the runs.
To compute the multi-run plots, Fofonov et al. (Fo-
fonov et al., 2016) propose to compute the similarity
of two scalar fields by computing the Jaccard distance
of the volumes that are enclosed by the isosurfaces
of a representative isovalue. They later generalize
this isosurface similarity measure to a field similar-
ity measure, which does not require the choice of a
representative isovalue, and even to a multifield simi-
larity measure that simultaneously considers multiple
fields (Fofonov and Linsen, 2018b). We support all
options for similarity measures.
In case of the isosurface similarity, the values at
the samples are thresholded against the isovalue lead-
ing to a binary n-dimensional vector, where n is the
number of samples. In the case of field similarity, the
field values are stored in the n-dimensional vector. We
refer to this vector as feature vector and will use it for
our predictions, see Section 4.
The multi-run plot is generated by using pair-
wise dissimilarities of all time steps of all simula-
tion runs, which are stored in a distance matrix. The
distance matrix is fed to an MDS approach (Wickel-
maier, 2003). By drawing a curve through the points
in the 2D embedding that represent the time steps of
each simulation run in chronological order, one ob-
tains the multi-run plot, where each run is typically
colored using a distinct color. An alternative to gen-
erating a 2D embedding is to generate a 1D embed-
ding such that an axis orthogonal to the 1D embed-
ding can be used to show the change over time in a
2D plot. Figure 1 shows such 1D-over-time multi-run
plots, while Figure 2(left) shows a 2D multi-run plot.
Interpolation. Our prediction is based on scattered
data interpolation schemes. Obviously, the choice
of the interpolation method affects the outcome. We
choose representatives of the most common scattered
data interpolation schemes based on inverse distances,
radial basis functions, and natural neighbors.
The original inverse-distance-weighted interpo-
lation method was proposed by Shepard (Shepard,
1968). Calculating a weighted average of the values
at n given sample points p
p
p
i
, the interpolated function
value f (q
q
q) in point q
q
q can be written as
f (q
q
q) =
(
∑
n
i=1
(d
i
)
−u
f (p
p
p
i
)
∑
n
i=1
(d
i
)
−u
, if d
i
6= 0
f (p
p
p
i
), if d
i
= 0
,
Uncertainty-aware Prediction in Spatio-temporal Simulation Ensemble Visualizations
217

where d
i
= kq
q
q − p
p
p
i
k is the Euclidean distance to data
point p
p
p
i
, f ( p
p
p
i
) is the value of data point p
p
p
i
, and u is
an exponent. Shepard empirically chose u = 2.
The interpolation method using radial basis func-
tions also uses weighted averages, but with radially
symmetric basis functions as a weight. It calculates
f (q
q
q) =
∑
n
i=1
φ(kq
q
q − p
p
p
i
k) f (p
p
p
i
)
∑
n
i=1
φ(kq
q
q − p
p
p
i
k)
,
where φ : R
+
→ R is a basis function (Buhmann,
2000). We are using Gaussian kernels φ(d
i
) = e
−(εd
i
)
2
and multiquadrics φ(d
i
) =
p
1 − (εd
i
)
2
where d
i
is de-
fined as above and ε is a parameter.
The natural neighbor interpolation scheme (Sib-
son, 1980) is based on the construction of a Voronoi
diagram. Points with adjacent Voronoi cells are re-
ferred to as natural neighbors. Sibson’s interpolant f
in point q
q
q is defined as
f (q
q
q) =
∑
k
i=1
u
i
f (p
p
p
i
)
∑
k
i=1
u
i
,
where k is the number of natural neighbors and weight
u
i
is defined as the ratio between the area of the inter-
section of the Voronoi cell of p
p
p
i
with the Voronoi cell
of q
q
q when inserting q
q
q in the Voronoi diagram (Park
et al., 2006) (Cueto et al., 2003).
4 PREDICTION
Our goal is an interactive visual analysis of the param-
eter space of a spatio-temporal simulation ensemble
including the influence of parameters on the simula-
tion outcome. The parameter space is typically sam-
pled using some heuristic sampling strategy. During
the analysis, it is desirable to create new simulation
runs by querying the parameter space, i.e., by select-
ing a new sample interactively. Ideally, the simulation
would then be run to produce a new result. However,
in practice, this is not possible due to computation
times. We propose to predict the simulation outcome
by interpolating between the existing simulation re-
sults. Thus, the user can select a new parameter set-
ting interactively, our prediction is executed for this
parameter setting, and the predicted result is visual-
ized in the multi-run plot (cf. Section 3).
The predicted outcome is obtained by predicting
each time step individually. Each time step is inter-
polated from the respective time steps of all existing
simulation runs. However, different simulation runs
may have different simulated duration and adaption
of time steps may be used leading to varying lengths
of time steps. To obtain a consistent prediction, the
start time of a prediction is chosen as the largest avail-
able start time among the existing runs and the end
time corresponds to the smallest end time. Linear in-
terpolation between time steps was chosen to obtain
the function values for time steps that lie between two
known time steps. The time steps on which the inter-
polated results are calculated are chosen equidistantly.
For the interpolation, we perform a scattered data
interpolation, where the weights are computed using
Euclidean distance in parameter space. We employ
the different interpolation schemes described in Sec-
tion 3, of which the user can select any.
Since the predicted result is visualized in the
multi-run plot, we propose to only interpolate the fea-
ture vectors (cf. Section 3). The feature vectors of all
existing simulation runs are pre-computed and stored,
i.e., during our interactive session only the feature
vectors need to be loaded and not the entire fields.
The predicted feature vectors are used to compute the
dissimilarities for the MDS process. By predicting
each time step we can directly produce a visualization
of the predicted result in the form of a curve in the
multi-run plot. Hence, we can interactively analyze
the parameter space using our interpolation scheme
of feature vectors for the multi-run plot.
The feature vector interpolation is a compromise
between interpolating the entire field and interpolat-
ing just the embedded 2D points, which represents a
trade-off between accuracy (spatial features are still
represented well) and efficiency (only n-dimensional
vectors need to be loaded and processed).
5 UNCERTAINTY ESTIMATION
Since our predictions only approximate a simulation
result, it is assumed to introduce errors. We do not
know a priori, how large these errors are, but we can
determine uncertainties to estimate how accurate we
expect our predictions to be. Assuming that we want
to predict the result for parameter values out of a d-
dimensional parameter space, then the selected pa-
rameter settings are represented by a point q
q
q in the
d-dimensional parameter space. We identified three
sources of uncertainty that we consider to estimate
the uncertainty of a prediction for parameter setting
q
q
q. First, the higher the distance of parameter setting q
q
q
to parameter settings of existing runs, the more un-
certain the prediction gets. Second, the higher the
diversity of existing simulation runs with similar pa-
rameter setting to q
q
q, the more uncertain the prediction
gets. Third, the choice of the interpolation method
itself potentially creates uncertainty.
Distance Uncertainty. When predicting the result for
IVAPP 2019 - 10th International Conference on Information Visualization Theory and Applications
218

an existing parameter setting using interpolation, the
prediction will be equal to the existing result. Hence,
we can be sure about the outcome and the uncertainty
should be zero. The farther we go away from the
existing parameter settings, the more the uncertainty
should grow. Moreover, the uncertainty should vary
smoothly and its values should range from zero to
one.
We can capture this distance-based uncertainty by
computing the Euclidean distances d
i
of the predicted
parameter setting q
q
q to the parameter settings p
p
p
i
of the
N existing runs used for interpolation. In the visual-
isation, the distance-based uncertainty is additionally
multiplied by a scaling constant, see Section 6. We
define our uncertainty measure by multiplying these
distances and normalizing them by the largest possi-
ble distance d
max
, i.e., we set
u
D
=
N
∏
i=1
d
i
d
max
.
The multiplicative dependence on the distances as-
sures that the uncertainty is zero, iff q
q
q is equal to any
p
p
p
i
. Moreover, uncertainty increases smoothly with in-
creasing distances.
Diversity Uncertainty. If all existing simulation runs
for parameter settings close to the predicted param-
eter setting q
q
q are similar, then the interpolated pre-
diction will also be similar and we can assume this
to be a quite accurate prediction. The more the ex-
isting simulation runs for parameter settings close q
q
q
vary, the more uncertain it is whether the prediction
is producing an accurate variant. This uncertainty as-
pect we capture by computing the standard deviation
of the feature vectors f (p
p
p
i
) from the interpolated fea-
ture vector f (q
q
q). The added terms are the squared
differences of the feature vectors, which represent the
squared lengths of the difference vectors. Addition-
ally, each of the added terms is weighted with a func-
tion φ
i
depending on the Euclidean distance d
i
of p
p
p
i
to q
q
q in parameter space such that parameter settings
closer to q
q
q have a larger impact. We compute the
diversity-based uncertainty measure as
u
V
(q
q
q) =
s
1
N
N
∑
i=1
φ
i
( f (p
p
p
i
) − f (q
q
q))
2
where N is the number of points taken into consider-
ation for the interpolation and
φ
i
=
1
d
i
∑
k
1
d
k
N if all d
k
6= 0.
This equation fulfills the condition
∑
i
φ
i
= N, which
assures that the result equals the standard deviation
(without weights φ
i
). If d
j
= 0 for any j, φ
j
is set
to N and all other weights φ
k
= 0 for k 6= j. This
assures that the uncertainty u
V
(q
q
q) = 0 when d
j
= 0,
i.e., q
q
q = p
p
p
j
.
Interpolation Uncertainty. Interpolation is used for
prediction. Every interpolation scheme makes an as-
sumption that is reflected by the underlying interpo-
lation model. Since we cannot be certain, which is
the correct interpolation model, choosing one of them
introduces uncertainty. To capture this uncertainty
aspect, we compute the interpolation result by using
other interpolation schemes and calculate the standard
deviation of the other interpolation results to the cho-
sen one, i.e.:
u
I
(q
q
q) =
v
u
u
t
1
N
I
N
I
∑
i=1
( f
i
(q
q
q) − f (q
q
q))
2
(1)
where N
I
is the number of other interpolation meth-
ods used and f
i
(q
q
q) are the interpolated feature vec-
tors using the other interpolation methods. If all in-
terpolation methods produce the same results, i.e.,
f
i
(q
q
q) = f (q
q
q) for all i, then the uncertainty u
I
(q
q
q) = 0
as desired.
Composited Uncertainty. For compositing the three
uncertainty measures, we postulate that the overall
uncertainty should be larger than zero, if any of its
components is larger than zero. Thus, we composite
the three uncertainty measures by
u(q
q
q) = u
I
(q
q
q) + u
V
(q
q
q) + u
D
(q
q
q). (2)
Please note that the uncertainty u(q
q
q) = 0 when q
q
q co-
incides with the parameter setting of any existing run
(q
q
q = p
p
p
i
), as all three components vanish.
6 UNCERTAINTY
VISUALIZATION
Prediction Uncertainty. Our first uncertainty visual-
ization goal is to visually convey how certain a predic-
tion is. Since we are visualizing the predicted result
in the multi-run plot, the goal is to enhance the plot
to visually represent the uncertainty in the prediction.
Following the idea of a box plot and its generaliza-
tions in the form of functional box plots (Sun and
Genton, 2011) or curve box plots (Mirzargar et al.,
2014), we visualize the uncertainty in the prediction
by displaying a band (e.g., reflecting the standard de-
viation) around the curve that represents the predic-
tion (i.e., the most likely case).
For the creation of the band, we estimate the un-
certainty of the predicted value for each time step.
Uncertainty-aware Prediction in Spatio-temporal Simulation Ensemble Visualizations
219

The respective uncertainty value is used as the width
of the band to both sides of the curve that represents
the prediction. The band is colored using the same
color that was used for the predicted curve, but with
transparency to not occlude other curves.
To compute the band, we perform the computation
of the uncertainties component-wise, i.e., for each
component of the feature vector. The band is then
created by adding the component-wise uncertainties
to the interpolated feature vector and mapping the
resulting vectors to the embedding of the multi-run
plot. This mapping is performed for each time step
independently. Connecting the mapped positions in
chronological order leads to one border of the band,
which is then mirrored to produce the band.
We want to emphasize that the components u
I
and
u
V
are not normalized to a given range such that the
results calculated for these components have the same
dimension as the given data values. Therefore, they
do not only provide a qualitative measure of uncer-
tainty but also a quantitative one, i.e., it can directly
be compared to the given data values. The uncer-
tainty component u
D
caused by the distance, how-
ever, is not directly correlated to the given data value
ranges, which makes it primarily suitable for a qual-
itative analysis. In our experiments, we empirically
chose a scaling factor for the values of u
D
, i.e., using
a division by factor 2
14−n
with n being the number of
simulation runs.
Figure 1: Comparison of interpolation methods for predic-
tion of new run (height 1 km, radius of 240 m, angle of 50
◦
)
using all existing runs in the 1D-over-time multi-run plot.
Predicted runs are qualitatively similar (left) and reflect the
oscillatory behavior of existing runs (right).
Parameter Space Uncertainty. Since the user may
select any parameter setting for prediction, guidance
to select new parameter settings is desirable. This can
be achieved by displaying the parameter settings of
existing runs in the d-dimensional parameter space to
see their distribution. To further guide the user to po-
tentially interesting parameter settings, we visualize
the uncertainty in the parameter space.
We first need to estimate the uncertainties. To do
so, we sample the d-dimensional parameter space us-
ing an equidistant sampling strategy, which leads to a
d-dimensional uncertainty field defined over a regu-
lar grid. For each grid point, we compute the uncer-
tainty that is associated with the respective parameter
setting using the uncertainty measures of Section 5.
More precisely, we estimate the predicted simulation
outcome and its uncertainty as in Section 6. As the
uncertainty in Section 6 was computed per time step,
we now average the uncertainty over all time steps
to obtain a single scalar uncertainty value that is as-
sociated with each grid point of the parameter space
sampling.
We propose to visualize the given field by interac-
tively choosing an axis-aligned 2D slice through the
parameter space and to perform a color mapping of
the uncertainty values. We refer to this concept as the
uncertainty map. A 2D slice-based approach is desir-
able, as it has no inherent occlusion issues and scales
to dimensionality d beyond three dimensions. The
resolution of the slice can be chosen by the user and
trilinear interpolation is used to interpolate the uncer-
tainty at any point on the slice.
We implemented our entire system within Voreen
(Meyer-Spradow et al., 2009), a rapid application de-
velopment framework for interactive volume visual-
ization. All prediction and uncertainty visualization
methods have been incorporated into the framework
for a smooth user experience. Figure 6 shows the
slice-based visualization of an uncertainty map.
7 APPLICATION SCENARIO
We apply our approach to the simulation ensemble of
deep water impact by asteroids that hit the Earth’s sur-
face in the ocean (Patchett and Gisler, 2017), where
each simulation run is represented by time-varying
volumetric multi-field data with 300
3
spatial grid
points and varying number of adaptive time steps (be-
tween 162 and 487). The ensemble data is made avail-
able through the IEEE SciVis Contest 2018, unfortu-
nately only comprising seven runs with three scalar
fields (pressure, temperature, and volume fraction of
water). The parameter space consists of three param-
eters: the height of the airburst (zero in case of no
airburst), the size of the asteroid, and the angle of en-
try. Table 1 lists the seven runs and their parameter
IVAPP 2019 - 10th International Conference on Information Visualization Theory and Applications
220

settings. We used multifield similarities (Fofonov and
Linsen, 2018b) such that all fields are considered and
we did not have to choose representative isovalues.
Table 1: Parameter settings of Deep Water Impact simula-
tion ensemble.
Run Radius Angle Height
yA11 100m 45
◦
0km
yA31 250m 45
◦
0km
yA32 250m 60
◦
0km
yB11 100m 45
◦
5km
yB31 250m 45
◦
5km
yC11 100m 45
◦
10km
yC31 250m 45
◦
10km
Prediction. To document that the interpolation-based
prediction is producing suitable results, we first made
a simple test that makes prediction considering only
two simulation runs, yA31 and yC31. The two runs
have the same parameter setting for asteroid radius
and incoming angle, but differ in the height of the air-
burst, where yA31 had no airburst and yC31 had an
airburst at height 10km. We predicted runs that were
in between by sampling the airburst height equidis-
tantly with step size 2km. Figure 3 shows the predic-
tion when using inverse-distance-based interpolation
and 1D multi-run plots over time. For all our exam-
ples, the predicted line stops as soon as one of the ex-
isting runs used for interpolation has no further data.
The results indeed deliver the expected and desired re-
sults, as the predicted runs smoothly vary between the
existing runs when varying the simulation parameter.
Next, we wanted to investigate the behavior of the
prediction when using different interpolation methods
on all existing runs within the 3D parameter space.
The parameter settings for the predicted run were an
airburst at height 1 km, an asteroid radius of 240 m,
and an entry angle of 50
◦
. The 1D-over-time multi-
run plots in Figure 1(left) show that all predictions
are qualitatively similar by exhibiting an oscillatory
behavior, but location and amplitude of the curves
vary. Inverse-distance-based and Gaussian radial-
basis-function interpolation produce the most similar
results. When comparing the different prediction re-
sults to the existing runs in Figure 1(right), one can
observe that the oscillatory behavior of the existing
runs is preserved.
To test the quality of our prediction in compar-
ison to running an actual simulation, we performed
a leave-one-out test. Thus, we removed simulation
run yC11 from the ensemble, then tried to predict run
yC11, and compared the predicted to the simulated
outcome. Note that the prediction is actually per-
forming an extrapolation here. Still, all interpolation
methods are applicable except for the natural neigh-
bor interpolation, where our implementation required
the predicted parameter setting to lie inside the con-
vex hull of the existing parameter settings. Figure 2
shows the predicted results in comparison to the sim-
ulated result (labeled as yC11) for the water fraction
field. The left side of the figure shows a 2D multi-run
plot, where time in encoded by the brightness of the
colors. We observe that the multiquadric radial-basis-
function interpolation is producing results that are far
from yC11, while Gaussian radial-basis-function in-
terpolation and Shepard inverse-distance-based inter-
polation are very close. Since the variation of those
runs is small when compared to other runs, we inter-
actively select only the predicted runs and run yC11
and visualize them in a 1D-over-time multi-run plot
on the right side of the figure. We observe that the
Gaussian radial-basis-function interpolation produces
a prediction that is very close to the simulated run,
as the curves are almost coinciding. Similar obser-
vations can be made for the other fields such that we
can conclude that the Gaussian radial-basis-function
prediction is in surprisingly high agreement with the
actual simulated run.
Prediction Uncertainty. To illustrate the predic-
tion uncertainty visualization within the multi-run
plots, we predict the pressure field of run yB31 using
inverse-distance-based interpolation. Figure 4 shows
the bands with respect to various uncertainties. The
distance-based uncertainty shall be interpreted quali-
tatively only, i.e., it is more meaningful for comparing
different predictions as in the uncertainty map (see be-
low). The interpolation-based uncertainty visualiza-
tion illustrates that there is some variation in the pre-
diction when using different methods, which matches
our observations from above. Still, the simulated run
is not completely within the band such that we can
conclude that the different interpolation methods gen-
erally do not predict the outcome as well as for run
yC11 above. The diversity-based uncertainty shows
up to be larger. This is caused by the fact that we
only have six existing runs (when leaving out yB31),
whose parameter settings have similar distances in pa-
rameter space. Since the existing runs are quite di-
verse in the simulation outcome, the diversity-based
uncertainty is high throughout the prediction. Thus,
the complete uncertainty obtained by compositing the
three uncertainty aspects is also pretty high. The re-
spective band (partially cropped) embeds run yB31.
Parameter Space Uncertainty. The uncertainty
within the 3D parameter space is visualized using the
slice-based views shown in Figure 6, where the X-axis
represents the airburst height (0km-10km), the Y -axis
represents the asteroid’s radius (100m-250m), and the
Uncertainty-aware Prediction in Spatio-temporal Simulation Ensemble Visualizations
221
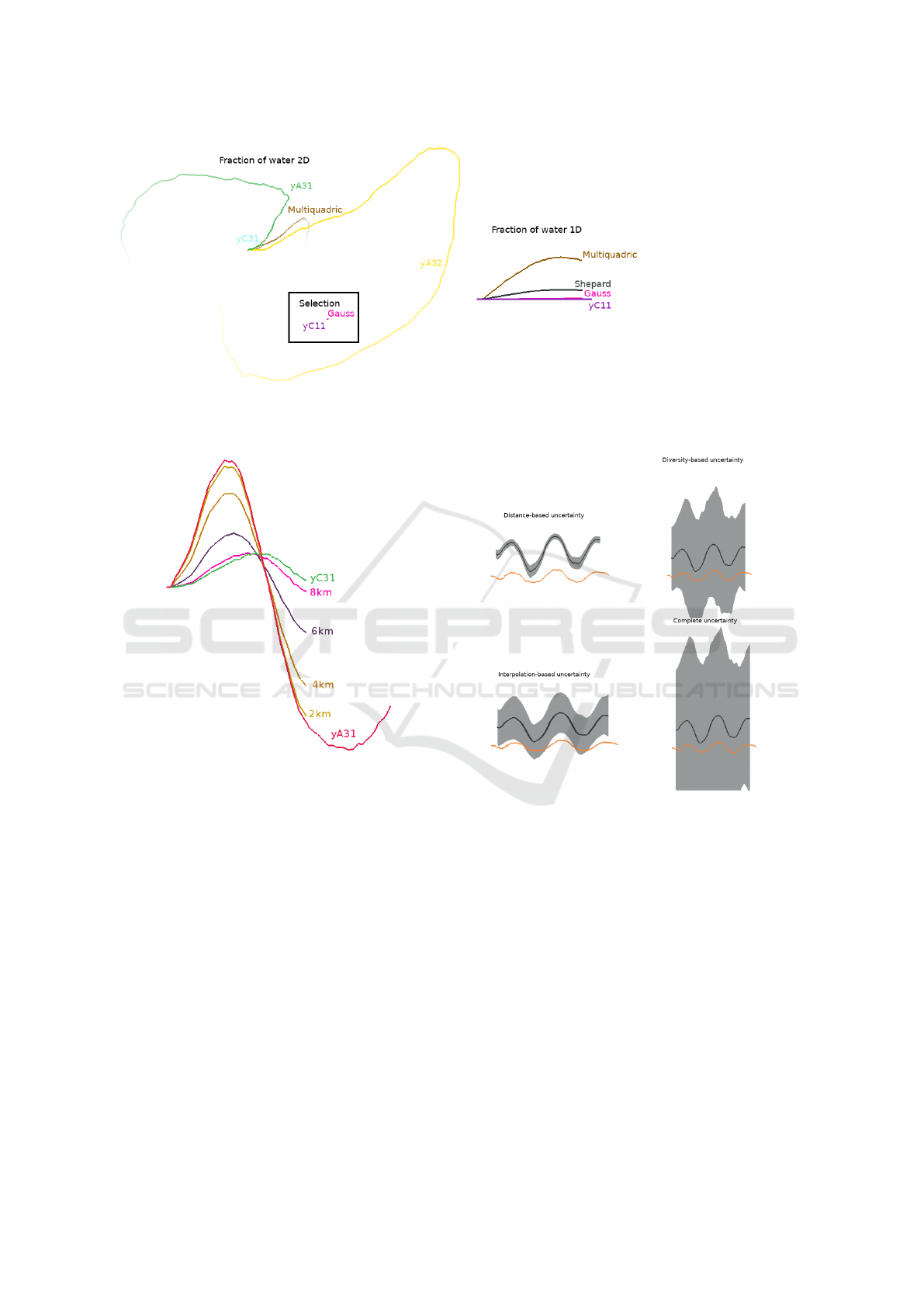
Figure 2: Interpolation results for the fraction of water using different methods for the parameters of the run yC11. In the left
image, the time is colour coded. In the box with the black boundary, a selection of only the interpolation result produced with
Gaussian kernels and the original run can be seen. It is located in the point where all the other runs also start.
Figure 3: Prediction by interpolating between two runs
(yA31 and yC31) delivers a smooth transition between the
runs in the 1D-over-time multi-run plot. Inverse-distance-
based interpolation with exponent 2 was chosen.
Z-axis represents the entry angle (45
◦
-60
◦
). The 3D
uncertainty field within the parameters’ range was es-
timated using the introduced uncertainty measures at
5
3
samples.
Figure 6a shows the distance-based uncertainty. It
can be observed how the uncertainty increases with
increasing distance from the existing runs’ parameter
settings depicted by the black dots (two black dots are
occluded by the plane).
Figure 6b shows a different distribution of uncer-
tainties when considering diversity. The largest un-
certainty can be observed around the point with height
0 km, angle 60
◦
, and radius 175 m. By construction,
uncertainties are low close to parameter settings of ex-
isting runs, which can be observed. However, it can
also be observed that uncertainties are quite high close
Figure 4: Uncertainty visualization in 1D-over-time multi-
run plots for predicting the pressure field of run yB31 (or-
ange). The prediction (black) is obtained using Shepard’s
inverse-distance-based interpolation.
to run yA32 (the only one with angle 60
◦
) in the up-
per left corner of the slice. This was to be expected,
as the simulation outcome of this run is quite different
from the others.
This effect is even stronger for the interpolation-
based uncertainty visualization in Figure 6c, where
the highest uncertainties are computed in the larger
vicinity of run yA32. The large differences between
run yA32 and other runs lead to strongly different in-
terpolation results. It is also interesting that the un-
certainties for height 5km are less than for height 0km
despite the fact that 3 runs with height 0km exist and
only 2 runs with height 5km. Thus, the interpolation-
based uncertainty is not mainly influenced by dis-
IVAPP 2019 - 10th International Conference on Information Visualization Theory and Applications
222
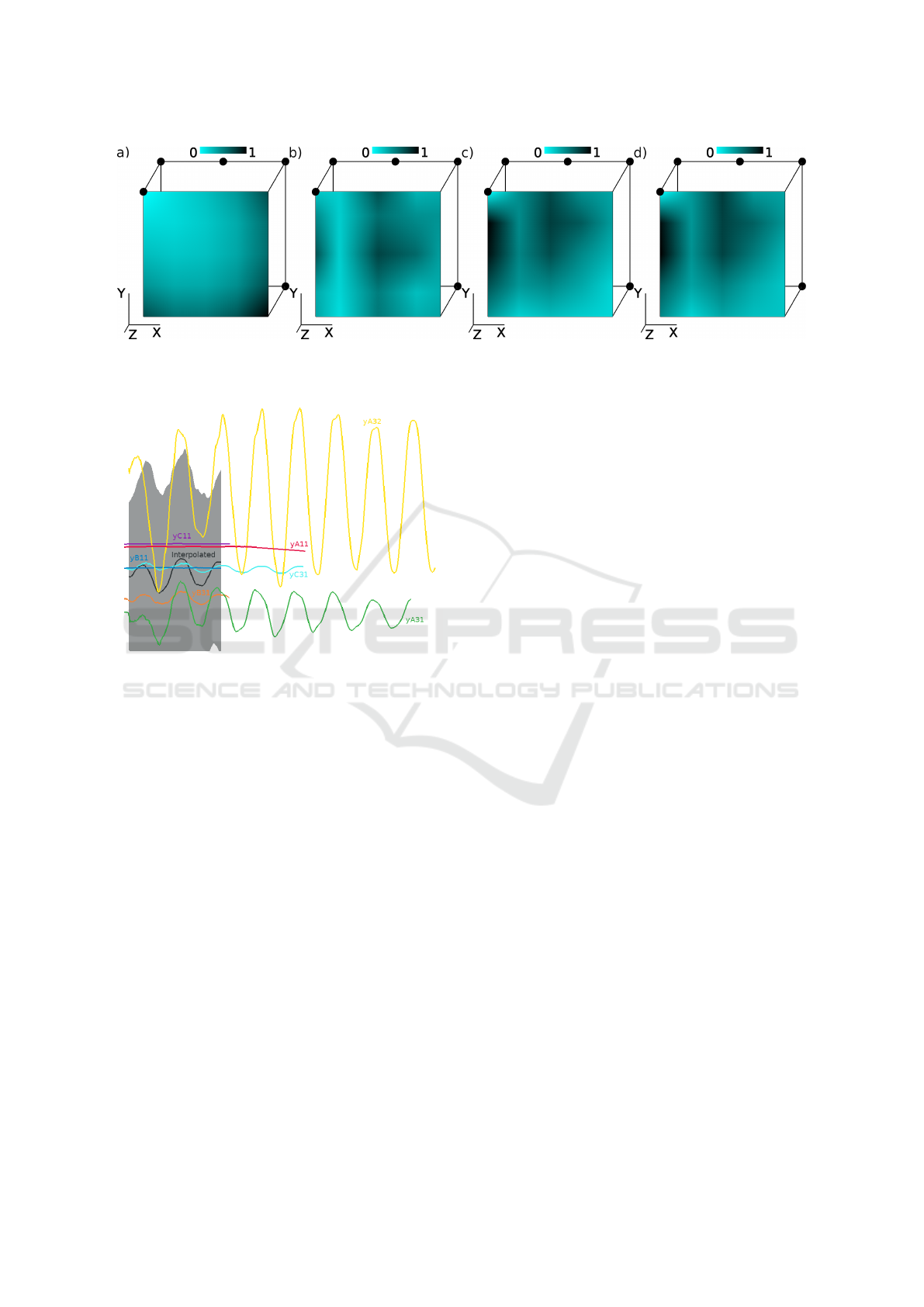
Figure 6: Visualization uncertainty in parameter space (X: airburst height, Y: asteroid radius, Z: entry angle) using 2D slices
(Z=60
◦
) through the uncertainty maps: a) Distance-based uncertainty. b) Diversity-based uncertainty. c) Interpolation-based
uncertainty. d) Composited uncertainty.
Figure 5: Composited uncertainty visualization in 1D-over-
time multi-run plots for predicting the pressure field of run
yB31 (orange). The prediction (black) is obtained using
Shepard’s inverse-distance-based interpolation.
tances.
The composited uncertainty map is shown in Fig-
ure 6d. It combines the different aspects of the un-
certainty measures. We can conclude that the desired
properties are achieved: Uncertainty vanishes at the
parameter settings of existing points, it increases with
increasing distance in their vicinity, and the uncer-
tainty field is smooth.
8 DISCUSSION AND
CONCLUSION
We proposed a method for predicting simulation out-
comes by interpolating feature vectors and for esti-
mating and visualizing the uncertainties in the pre-
diction. The uncertainty map helps to identify good
choices for further simulation runs in the sense of
computational steering. In our experiments, the Gaus-
sian radial-basis-function interpolation produced the
best prediction results. However, one should also
look into the nature of the analyzed physical simu-
lations. The simulation outcome shall vary smoothly
with changing parameter settings. In future work, it
would be interesting to apply the approach to larger
data sets. Computation times may then be a challenge
again. Generating the uncertainty map over a high-
resolution sample grid (especially when also parame-
ter space is of higher dimension) would also require
quite some computation time. Still, the computation
times are expected to be several order of magnitudes
lower than running the actual simulations. One way of
speeding the computations up would be the usage of
an adaptive time stepping scheme for prediction and
uncertainty estimation.
ACKNOWLEDGMENTS
This work was partially supported by the Deutsche
Forschungsgemeinschaft (DFG) under contract LI
1530/21-1.
REFERENCES
Berger, W., Piringer, H., Filzmoser, P., and Gr
¨
oller, E.
(2011). Uncertainty-aware exploration of continuous
parameter spaces using multivariate prediction. Com-
put Graphics Forum, 30(3):911–920.
Buhmann, M. D. (2000). Radial basis functions. Acta Nu-
merica, 9:1–38.
Cueto, E., Sukumar, N., Calvo, B., Mart
´
ınez, M., Cego-
nino, J., and Doblar
´
e, M. (2003). Overview and re-
cent advances in natural neighbour galerkin methods.
Archives of computational methods in engineering,
10(4):307–384.
Fofonov, A. and Linsen, L. (2018a). Multivisa: Visual anal-
ysis of multi-run physical simulation data using inter-
active aggregated plots. In Proceedings of the 13th
International Joint Conference on Computer Vision,
Uncertainty-aware Prediction in Spatio-temporal Simulation Ensemble Visualizations
223

Imaging and Computer Graphics Theory and Appli-
cations (VISIGRAPP 2018) - Volume 3: IVAPP, Fun-
chal, Madeira, Portugal, January 27-29, 2018., pages
62–73.
Fofonov, A. and Linsen, L. (2018b). Projected field similar-
ity for comparative visualization of multi-run multi-
field time-varying spatial data. Computer Graphics
Forum.
Fofonov, A., Molchanov, V., and Linsen, L. (2016). Visual
analysis of multi-run spatio-temporal simulations us-
ing isocontour similarity for projected views. IEEE
Trans. Visual Comput. Graphics, 22(8):2037–2050.
Griethe, H. and Schumann, H. (2006). The visualization of
uncertain data: Methods and problems. Proceedings
of International Conference on Perspectives in Busi-
ness Informatics Research, 2006.
Liu, S., Maljovec, D., Wang, B., Bremer, P. T., and Pas-
cucci, V. (2017). Visualizing high-dimensional data:
Advances in the past decade. IEEE Trans. Visual
Comput. Graphics, 23(3):1249–1268.
Matkovic, K., Gracanin, D., Jelovic, M., and Hauser, H.
(2008). Interactive visual steering - rapid visual proto-
typing of a common rail injection system. IEEE Trans.
Visual Comput. Graphics, 14(6):1699–1706.
Meyer-Spradow, J., Ropinski, T., Mensmann, J., and Hin-
richs, K. (2009). Voreen: A rapid-prototyping envi-
ronment for ray-casting-based volume visualizations.
IEEE Computer Graphics and Applications, 29(6):6–
13.
Mirzargar, M., Whitaker, R. T., and Kirby, R. M. (2014).
Curve boxplot: Generalization of boxplot for ensem-
bles of curves. IEEE Transactions on Visualization &
Computer Graphics, 20(12):2654–2663.
Pang, A. T., Wittenbrink, C. M., and Lodha, S. K. (1997).
Approaches to uncertainty visualization. The Visual
Computer, 13(8):370–390.
Park, S. W., Linsen, L., Kreylos, O., Owens, J. D., and
Hamann, B. (2006). Discrete sibson interpolation.
IEEE Transactions on visualization and computer
graphics, 12(2):243–253.
Patchett, J. M. and Gisler, G. R. (2017). Deep water impact
ensemble data set. http://sciviscontest2018.org/.
Phadke, M. N., Pinto, L., Alabi, O., Harter, J., Taylor, R. M.,
Wu, X., Petersen, H., Bass, S. A., and Healey, C. G.
(2012). Exploring ensemble visualization. Proc.SPIE,
8294:8294 – 8294 – 12.
Potter, K., Rosen, P., and Johnson, C. R. (2012). From quan-
tification to visualization: A taxonomy of uncertainty
visualization approaches. In Dienstfrey, A. M. and
Boisvert, R. F., editors, Uncertainty Quantification in
Scientific Computing, pages 226–249, Berlin, Heidel-
berg. Springer Berlin Heidelberg.
Potter, K., Wilson, A., Bremer, P. T., Williams, D., Dou-
triaux, C., Pascucci, V., and Johnson, C. R. (2009).
Ensemble-vis: A framework for the statistical visual-
ization of ensemble data. In 2009 IEEE International
Conference on Data Mining Workshops, pages 233–
240.
Potter, K. C., Brunhart-Lupo, N. J., Bush, B. W., Gruchalla,
K. M., Bugbee, B., and Krishnan, V. K. (2017).
Coupling visualization, simulation, and deep learn-
ing for ensemble steering of complex energy models:
Preprint.
Rhodes, P. J., Laramee, R. S., Bergeron, R. D., Sparr, T. M.,
et al. (2003). Uncertainty visualization methods in
isosurface rendering. In Eurographics, volume 2003,
pages 83–88.
Sanyal, J., Zhang, S., Dyer, J., Mercer, A., Amburn, P.,
and Moorhead, R. (2010). Noodles: A tool for vi-
sualization of numerical weather model ensemble un-
certainty. IEEE Trans. Visual Comput. Graphics,
16(6):1421–1430.
Sedlmair, M., Heinzl, C., Bruckner, S., Piringer, H., and
M
¨
oller, T. (2014). Visual parameter space analysis:
A conceptual framework. IEEE Trans Visual Comput
Graphics, 20(12):2161–2170.
Shepard, D. (1968). A two-dimensional interpolation func-
tion for irregularly-spaced data. In Proceedings of
the 1968 23rd ACM National Conference, ACM ’68,
pages 517–524, New York, NY, USA. ACM.
Sibson, R. (1980). A vector identity for the dirichlet tessel-
lation. Mathematical Proceedings of the Cambridge
Philosophical Society, 87(1):151–155.
Splechtna, R., Matkovi
´
c, K., Gra
ˇ
canin, D., Jelovi
´
c, M., and
Hauser, H. (2015). Interactive visual steering of hi-
erarchical simulation ensembles. In 2015 IEEE Con-
ference on Visual Analytics Science and Technology
(VAST), pages 89–96.
Sun, Y. and Genton, M. G. (2011). Functional boxplots.
Journal of Computational and Graphical Statistics,
20(2):316–334.
Waser, J., Fuchs, R., Ribicic, H., Schindler, B., Bloschl,
G., and Groller, E. (2010). World lines. IEEE Trans.
Visual Comput. Graphics, 16(6):1458–1467.
Wickelmaier, F. (2003). An introduction to mds. Sound
Quality Research Unit, Aalborg University, Denmark,
46(5).
Xie, J., Sauer, F., and Ma, K.-L. (2015). Fast uncertainty-
driven large-scale volume feature extraction on desk-
top pcs. In Large Data Analysis and Visualization
(LDAV), 2015 IEEE 5th Symposium on, pages 17–24.
IEEE.
IVAPP 2019 - 10th International Conference on Information Visualization Theory and Applications
224
