
Semi-supervised Object Detection with Unlabeled Data
Nhu-Van Nguyen, Christophe Rigaud and Jean-Christophe Burie
Laboratory L3i, SAIL joint Laboratory, Universit
´
e de La Rochelle, 17042 La Rochelle CEDEX 1, France
Keywords:
Object Detection, Semi-supervised.
Abstract:
Besides the fully supervised object detection, many approaches have tried other training settings such as
weakly-supervised learning which uses only weak labels (image-level) or mix-supervised learning which uses
few strong labels (instance-level) and many weak labels. In our work, we investigate the semi-supervised
learning with few instance-level labeled images and many unlabeled images. Considering the training of
unlabeled images as a latent variable model, we propose an Expectation-Maximization method for semi-
supervised object detection with unlabeled images. We estimate the latent labels and optimize the model for
both classification part and localization part of object detection. Implementing our method on the one-stage
object detection model YOLO, we show that like the weakly labeled images, the unlabeled images also can
boost the performance of the detector by empirical experimentation on the Pascal VOC dataset.
1 INTRODUCTION
Given an individual image, the object detection task
aims at detecting all object instances in the image.
Nowadays, the most successful detectors use the Con-
volutional Neural Network (CNN) models which can
be classified into two different types of model: two-
stage models (He et al., 2017; Ren et al., 2015) and
one-stage models (Liu et al., 2016; Redmon and Far-
hadi, 2016; Lin et al., 2017). The main difference
is that while two-stage models use at first a proposal
network to generate candidate boxes and then clas-
sify these boxes, one-stage models use anchors boxes
and directly predict bounding boxes without gene-
rating region proposals. While the CNN approach
gives the best results on every standard benchmar-
king detection datasets such as Pascal VOC (Eve-
ringham et al., 2015) or COCO (Lin et al., 2014),
it requires a large amount of instance-level labeled
images with bounding box annotations. This is a
problem in real-case applications as the bounding
box labels are very difficult to obtain. To overcome
this problem, many approaches have tried other trai-
ning settings for CNN models, including weakly-
supervised, mix-supervised and semi-supervised le-
arning. We would like to insist that many works
consider mix-supervised learning, which uses both
image-level labels (weak labels) and instance-level la-
bels (strong labels), as semi-supervised learning. In
our work, we differentiate semi-supervised from mix-
supervised learning; where semi-supervised learning
involves instance-level labeled and unlabeled data. In
Figure 1, we visualize these different settings.
In this paper, we develop an online method for
training semi-supervised object detection by using
EM-approach (Expectation-Maximization) for one-
stage models which directly predict bounding boxes
”without generating region proposals”. Unlike most
of the previous works, we deal with the labeled and
unlabeled data together. Our proposed algorithm es-
timates latent instance-level labels for unlabeled data
and based on this estimation, optimizes the CNN mo-
del parameters using mini-batch Stochastic Gradient
Descent (SGD). We show that with fewer instance-
level labeled data we can train competitive object de-
tectors with the help of many unlabeled data. More-
over, we find out that our semi-supervised setting can
almost match the performance of mix-supervised lear-
ning in (Yan et al., 2017) which requires image-level
labels. There are two works (Yan et al., 2017; Papand-
reou et al., 2015) have used EM-approach for weakly-
supervised or semi-supervised settings, but our work
is distinct from them. The difference between (Yan
et al., 2017; Papandreou et al., 2015) and our appro-
ach is discussed in Section 2.
In resume for our contributions, we present a no-
vel semi-supervised EM algorithm for training one-
stage object detection models which does not require
image-level labels and focuses on both localization
task and classification task in an object detection mo-
del. We show that with additional unlabeled data,
our semi-supervised training gives better performance
Nguyen, N., Rigaud, C. and Burie, J.
Semi-supervised Object Detection with Unlabeled Data.
DOI: 10.5220/0007345602890296
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 289-296
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
289
CNN
model
loss
(a) Supervised learning
CNN
model
+”train”
loss
(b) Weakly-supervised learning
CNN
model
loss
+”train”
(c) Mix-supervised learning
CNN
model
loss
(d) Semi-supervised learning
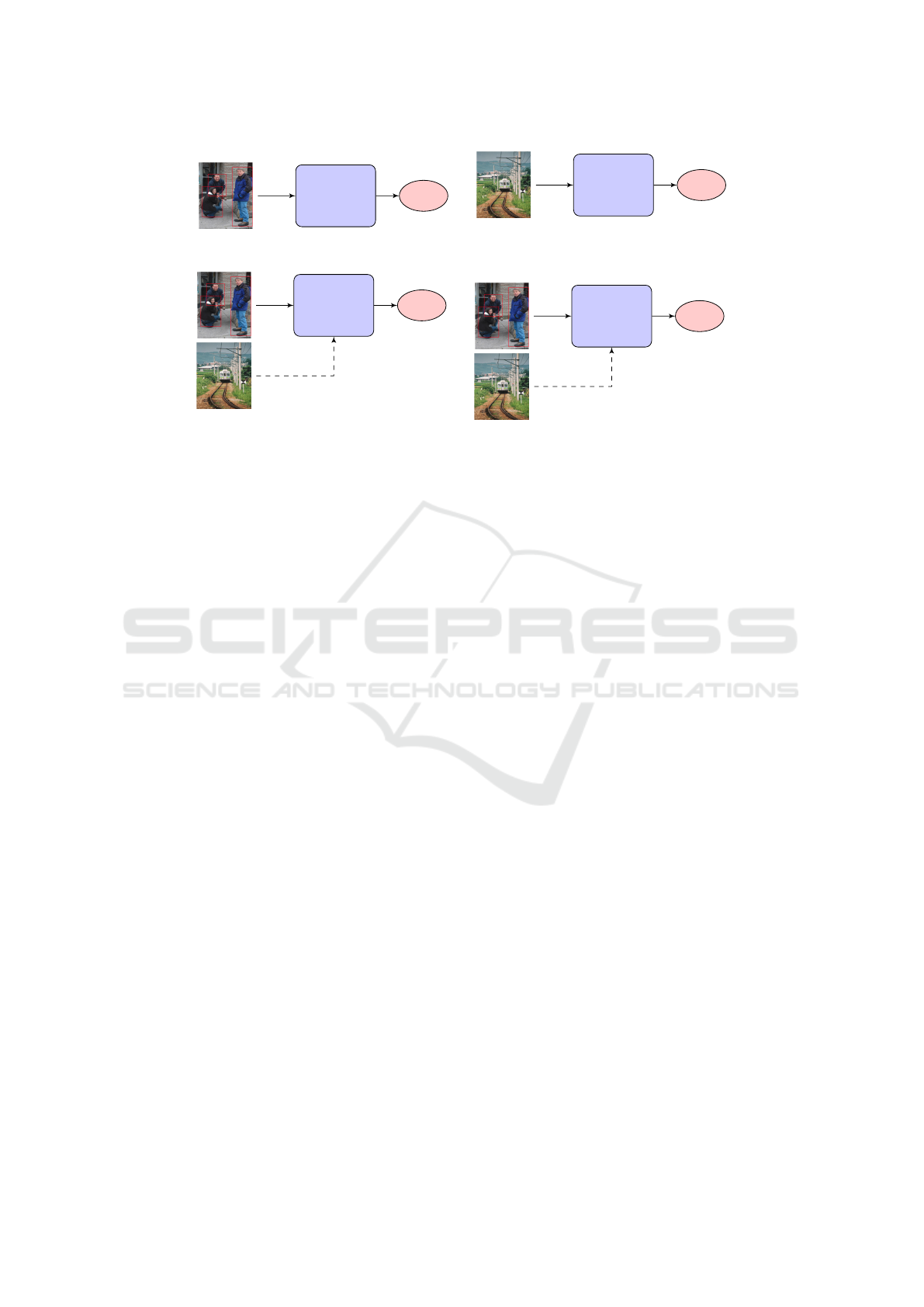
Figure 1: Training settings for object detection using CNN models. (a) is supervised learning which uses instance-level labels
(red bounding boxes in the image). (b) is weakly-supervised learning where only image-level labels (”train”) are used. (c) is
mix-supervised learning where both image-level labels (”train”) and instance-level labels (red bounding boxes) are used. (d)
is semi-supervised learning where instance-level labeled images and unlabeled images are used.
than the supervised training alone with labeled data,
by experimenting on the widely used Pascal VOC
dataset (Everingham et al., 2015). We show that
our approach almost matches the performance of the
mix-supervised training with instance-level labels and
image-level labels (Yan et al., 2017).
2 RELATED WORK
Many methods for object detection have been propo-
sed; they can be classified into two categories: one-
stage models and two-stage models. All the best ob-
ject detection models require a significant amount of
instance-level labeled data which poses problems in
real-case applications where instance-level labels are
difficult to obtain. Since the unlabeled data or we-
akly labeled (image-level) data are larger and easier
to acquire, many researches have proposed different
settings which can profit weakly labeled data or unla-
beled data.
Currently, existing semi-supervised methods usu-
ally use both the image-level labels and some of
the instance-level labels (as mix-supervised in our
definition). From now on, we use the term “mix-
supervised” for this kind of setting to differentiate
with the semi-supervised setting where instance-level
labeled data are used together with unlabeled data. In
(H
¨
ausser et al., 2017; Lee, 2013; Sajjadi et al., 2016),
authors have proposed semi-supervised training met-
hods for image classification task in which very few
image-level labeled data and much larger unlabeled
data are used. Hausser et al.(H
¨
ausser et al., 2017) pro-
pose to tune the CNN parameters by optimizing asso-
ciation circles which aims at finding the optimal em-
bedding to represent the different classes. Lee (Lee,
2013) improves the classification model performance
with additional labeled data which are generated from
the model’s predictions. In (Sajjadi et al., 2016) aut-
hors use regularization technique which profits the
unlabeled data to enforces the classes mutual exclu-
sivity. It also helps to push decision boundaries of
neural networks to less dense areas of the decision
space. However, they only focus on the classification
task with image-level labels in which the loss function
contains just a classification loss. It is not straightfor-
ward to use these methods for detection task which
use the instance-level labels and the loss including a
classification loss and a localization loss. Some works
(Yan et al., 2017; Papandreou et al., 2015) have used
EM-approach for mix-supervised training of object
detection model or object segmentation model. Yan
et al.(Yan et al., 2017) use the EM algorithm to train
weekly label (image-level) and strong labels (boun-
ding box) to train object detectors. The approach is
similar to (Papandreou et al., 2015) but (Yan et al.,
2017) run only three training iteration of the EM (E-
Step and M-Step). Every M-step consists of 40k SGD
iterations. Papandreou et al.(Papandreou et al., 2015)
use the EM approach for training segmentation mo-
del with two settings: weakly-supervised and mix-
supervised. In this method, the EM (E-Step and M-
Step) is applied for every iteration. In (Rosenberg
et al., 2005), authors have proposed a semi-supervised
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
290

training method for object detection. The authors
train an initial detector using labeled data then retrain
the detector by incremental adding the inferred label
of unlabeled examples using the initial trained model.
The unlabeled samples are selected based on a simi-
larity measure to all instances of the same class in the
labeled set. The incremental process ends when all
unlabeled examples are added to the training set.
Most of the existing works propose methods for
weakly-supervised training or mix-supervised lear-
ning while we deal with the semi-supervised training
(as our definition, this setting uses unlabeled data
instead of weakly-labeled data). Methods in (Papand-
reou et al., 2015; Yan et al., 2017) have used EM al-
gorithm for object segmentation and object detection
which are close to our approach. We also use an EM-
like approach, but our method is distinct from them.
The difference between our method and (Papandreou
et al., 2015) is that (Papandreou et al., 2015) deals
with object segmentation and it uses image-level la-
bels and instance-level labels to leverage the training
process, while we deal with object detection using
instance-level labeled data and unlabeled data. (Yan
et al., 2017) proposed an EM approach for weakly-
supervised training and semi-supervised learning for
object detection. However, (Yan et al., 2017) app-
lied EM update for two-stage object detection models
such as (He et al., 2017; Ren et al., 2015) which have
the region proposal step. The EM-algorithm in (Yan
et al., 2017) focus on maximizing the probability of
each object proposal (classification step in object de-
tection models), therefore it has not taken into account
the localization step in these object detection models.
Our method is applied for one-stage models, to en-
hance the optimization of both classification part and
localization part. In addition, similar to (Papandreou
et al., 2015), our method continuously makes the EM
update while (Yan et al., 2017) used disjointed appro-
ach (only 3 EM updates for the training process).
3 OBJECT DETECTION WITH
UNLABELED DATA
In this section, we present our EM-based semi-
supervised approach for one-stage CNN object
detectors. Our method provides end-to-end semi-
supervised training which integrates EM in each
iteration for classification optimization and in each
epoch for localization optimization. In early stages,
our model uses instance-level labeled data to train
the detector and then in later stages, uses the com-
bination of labeled and unlabeled data to improve
the detector’s performance. We first introduce some
basic notations and then demonstrate the formulation
of our method. Finally, we describe the details
of the algorithm and the implementation of our
approach with the YOLOv2 object detector proposed
in (Redmon and Farhadi, 2016).
Notation: we denote by x the training images (pixel
values), and z the instance-level labels (bounding box
and class). In particular, z
i
= (b
i
, c
i
) is a pair of
a bounding box b
i
= (x
i
, y
i
, w
i
, h
i
) and a category
c
i
∈ {0, ...,C} (C categories and the background). An
image x can have the bounding box annotation z (la-
beled images) or not (unlabeled images). Let θ as the
model parameters. We denote L the set of training
images with labels (x, z) and U the unlabeled images
set (x). Note that the instance-level labels may not be
visible in the training set.
3.1 Semi-supervised Training
In the case of supervised learning for object detection,
the general objective function is:
J(θ) = log(P(z|x; θ) =
B
∑
i=0
P(z
i
|x; θ) . (1)
where θ is the parameters vector of the model. As we
train with one-stage detectors, we maximize P(z|x; θ)
by maximizing the P(z
i
|x; θ) of each anchor box
in the anchor boxes set B of the image. In CNN
object detection models, J(θ) is often optimized by
mini-batch SGD.
For semi-supervised learning, we use both labe-
led images L and unlabeled images U . For the unla-
beled images set U, we have image values x and the
instance-level labels z as latent variables with the pro-
babilistic graphical model:
P(x, z;θ) = P(x)
∏
z∈B
P(z|x;θ) . (2)
In our method, we propose an EM-approach to learn
model parameter θ from training data which includes
both labeled and unlabeled images.
Expectation Step (E step): Calculate the expected
value of the log-likelihood function, with respect to
the conditional distribution of z given x under the cur-
rent estimate of the parameters θ
(t−1)
. As explained in
(Bishop, 2006), chapter 9, the expected complete-data
log-likelihood given the previous parameter estimate
θ
(t−1)
is
Q
(t)
(θ;θ
(t−1)
) = E
z|x,θ
(t −1)
[logP(x, z;θ)]
=
∑
P(z|x;θ
(t−1)
)logP(z|x;θ)
(3)
Semi-supervised Object Detection with Unlabeled Data
291

Kumar et al. (Kumar et al., 2010) have found that EM-
based approaches work better when presented with
the training data a meaningful order that facilitates
learning and the order of the samples is determined
by how easy they are. In our method, we have adop-
ted this technique by selecting the easy instance-level
labels estimated from unlabeled data (see 3.2).
In our method, we use a soft-EM approximation,
estimating in this E-step the latent label variable z by
Q
(t)
(θ;θ
(t−1)
) =
∑
P(z|x;θ
(t−1)
)logP(z|x;θ)
≈
∑
ˆz∈
ˆ
Z
P(ˆz|x; θ
(t−1)
)logP(ˆz|x; θ) .
(4)
where we create the set
ˆ
Z by remove z with
P(z|x;θ
(t−1)
) < β from all instance-level labels esti-
mated.
ˆ
Z = {z : P(z|x;θ
(t−1)
) ≥ β} . (5)
In the CNN model, this step can be understood
as follows: we apply the forward pass to unlabeled
images and keep high confidence output detections.
These detections are then used as the ground-truth of
the unlabeled images together with the labeled images
in the next step: Maximization.
Maximization Step (M step): we find the mo-
del parameters θ that maximize Q
(t)
(θ;θ
(t−1)
) ≈
logP(ˆz|x; θ) (terms that do not depend on θ are igno-
red). We optimize Q
(t)
(θ;θ
(t−1)
) by mini-batch SGD
similarly to eq. (1), treating ˆz as ground truth boun-
ding boxes.
θ
t
= argmax
θ
Q
(t)
(θ;θ
(t−1)
) = argmax
θ
logP(ˆz|x; θ) .
(6)
One of the reasons why the other works for object
detection and object segmentation have adopted EM-
approach together with the weak labels is that the ad-
ditional information from weak labels can help to op-
timize the classification part. In our method, we aim
at applying the EM algorithm for both classification
part and localization part. One difficulty we have had
is that the expected complete-data log-likelihood with
regard to the parameter estimate θ
(t−1)
for the locali-
zation part (the bounding box b of the latent varia-
ble z) will not help the optimization of Q
(t)
(θ;θ
(t−1)
)
using mini-batch SGD because the regression locali-
zation loss for unlabeled data will always be zero. To
overcome this problem, we do not estimate the boun-
ding box b of the latent variable z on each iteration of
the mini-batch SGD but on every epoch of the optimi-
zation process, with regard to the parameter estimate
θ
(t0)
of the model at the first iteration of the epoch.
Hence, on every iteration within each epoch, we can
optimize Q
(t)
(θ;θ
(t−1)
) using the expected complete-
data log-likelihood for the localization part computed
at the begin of the epoch using θ
(t0)
. The detailed al-
gorithm is presented in the next Section 3.2.
Our approach is similar to the work of Papandreou
et al. (Papandreou et al., 2015). However, we treat
the semi-supervised object detection task while they
deal with the task of object segmentation using mix-
supervised setting. In their work, they use EM to find
the maximum likelihood of the parameters with re-
gard to pixel classification, but in our case, we use EM
to find the maximum likelihood with regard to object
classification and bounding box regression. Another
work by Yan et al. (Yan et al., 2017) also uses EM-
approach. This work deals with the mix-supervised
object detection by using weak labels together with
strong labels. However, the authors propose a method
which focuses on object classification and the method
contains only three E-Steps and M-Steps.
In our approach, we focus on the semi-supervised
object detection by training together labeled images
and unlabeled images. Similar to (Papandreou et al.,
2015), we use a continuous EM updates in the trai-
ning process. Notably, we apply for both tasks: object
classification and object localization. Our method can
be used for any one-stage CNN detector. In this work,
we have implemented the approach for the YOLOv2
model (Redmon and Farhadi, 2016) which is one of
the fastest detectors with the state-of-the-art perfor-
mance.
3.2 Incorporate Semi-supervised EM
into YOLO
We use the object detection YOLOv2 model propo-
sed in (Redmon and Farhadi, 2016). The YOLOv2
model considers object detection as a regression pro-
blem. Unlike other models such as (He et al., 2017;
Ren et al., 2015), it unifies separated components of
object detection into a single neural network by com-
bining the loss for both classification part and loca-
lization part. The main idea is to divide the image
into an even grid and simultaneously predicts boun-
ding boxes from a set of predefined anchors, confi-
dence in those boxes, and class probabilities. In mo-
del YOLOv2, each grid cell can have k anchor boxes
with k = 5 or k = 9. However, to simplify the equati-
ons, we suppose k = 1. Generalizing to k > 1 anchor
boxes is straightforward.
For each anchor box b, the YOLOv2 model pre-
dicts the coordinates {x, y, w, h}of the box and its con-
fidence P(b|x;θ). For each grid cell containing an an-
chor box b, the YOLOv2 model predicts C conditional
class probabilities P(c
i
|x, b; θ) for C categories.
YOLOv2 multiplies the conditional class probabi-
lities and the individual box confidence prediction to
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
292

get class-specific confidence scores for each box b:
P(c
i
|x; θ) = P(c
i
|x, b;θ)P(b|x; θ) . (7)
where θ is the vector of CNN model parameters.
The above probabilities are computed using softmax
function as
P(c
i
|x, b; θ) = σ( f
j
(c
i
|x, b; θ)) . (8)
P(b|x;θ) = σ( f
j
(b|x;θ)) . (9)
where f
j
(c
i
|x, b; θ) and f
j
(b|x;θ) are the output of
CNN model for the anchor box b at the grid cell j.
Our optimization process which relies on the
bounding boxes estimation at the first iteration of each
epoch and the class probabilities estimation on every
iteration is summarized in the Algorithm ??.
The EM-based algorithms have been widely used
in many latent variable models, and its correctness has
already been proved (Little and Rubin, 1986). Besi-
des that, in another perspective, we believe that the
EM algorithm can help the problem of imbalanced
data of the CNN object detectors. A typical data im-
balance problem appears in all CNN object detection
models where there are more likely background boxes
than foreground boxes (boxes with object). Since
the background boxes are easier to classify, too many
of them will dominate the optimization process (Lin
et al., 2017). Similar to techniques like Hard Nega-
tive Mining in (Liu et al., 2016) and (Ren et al., 2015)
which try to down-sample easy background samples
to balance the training data, EM algorithms can also
balance the training data by estimating the missing
labels of unlabeled data and over-sampling the fore-
ground samples. By using the E-Step, our algorithm
provides many more foreground samples, from easy
one at the early stage to more difficult one at the la-
ter stage. This over-sampling of foreground examples
can balance the data between background class and
foreground class which should help the optimization
process. In Algorithm 1, we set the parameter β = 0.6
to take into account only ’easy’ foreground samples
(ignore the ’difficult’ foreground samples, and the
background samples of the unlabeled data).
Another problem to handle is the confidences of
instance-level labels z and the estimated ˆz are diffe-
rent, especially at early stages. Hence, in Algorithm
1, we introduce a weighting factor α ∈ [0, 1] to ba-
lance them. The parameter α is defined as a function
of time f (t) where t presents the number of epochs
and f (t) is computed by Equation 10. We limit α in
[0, 1] by setting α = min( f
+
(t), 1). In our experiment,
T
1
= 20 and T
2
= 120 works best.
f (t) =
t −T
1
T
2
−T
1
. (10)
Input : Initial parameters vector θ
T
1
of the
CNN model which is trained with
only labeled data by T
1
epochs,
c ∈
{
0, ...,C
}
, labeled training
images set L = (x
l
, z
l
), unlabeled
training images set U = (x
u
),
parameters α and β.
foreach epoch do
foreach x ∈U do
ˆz
x
epoch
= EStep(x, θ
(t
0
)
)
end
ˆz
epoch
= {ˆz
x
epoch
}where x ∈U
foreach mini-batch (U
m
, L
m
) do
ˆz
u
= E-Step ( U
m
, θ
(t−1)
)
replace {b} ∈ ˆz
u
by {b} ∈ ˆz
epoch
M-Step ((x
l
, z
l
), (x
u
, ˆz
u
), θ
(t)
, θ
(t−1)
)
end
end
Procedure E-Step(x, θ
0
)
foreach b ∈ B do
foreach c
i
∈C do
ˆ
f (c
i
) = f (c
i
|x, b; θ
0
)
end
ˆc = arg max
c
ˆ
f (c)
z
b
= (b, ˆc)
ˆ
f (z
b
) = f (b|x; θ
0
)
ˆ
f ( ˆc)
end
ˆz = {z
b
} = {(b, ˆc)}, where σ(
ˆ
f (z
b
)) ≥ β
return ˆz;
Procedure M-Step((x
l
, z
l
), (x
u
, ˆz
u
), θ, θ
0
)
Q
(t)
(θ;θ
0
) =
∑
z∈z
l
logP(z|x;θ) + α
∑
z∈ˆz
u
logP(z|x;θ)
Optimize YOLOv2 model using SGD to
update θ
return;
Algorithm 1: Semi-supervised EM algorithm for object de-
tection on YOLOv2 model.
4 EXPERIMENTAL EVALUATION
4.1 Experimental Protocol
4.1.1 Dataset
We evaluate our method on the widely used Pascal
VOC dataset, a well-known benchmark for object de-
tection in computer vision (Everingham et al., 2010;
Everingham et al., 2015), consisting of 20 foreground
object classes and one background class. We use the
Pascal VOC dataset to investigate the influence of the
Semi-supervised Object Detection with Unlabeled Data
293

proportion of labeled data in the training set. We train
the system on the union set of VOC 2012 trainval and
VOC 2007 trainval (07 + 12). We divide the training
set randomly following different settings: the quantity
of labeled images contains 10 to 50% of the training
set, the images left in the training set are considered
as the unlabeled images. The VOC 2007 test set is
used for evaluation.
We compare our semi-supervised model with the
baseline supervised object detection on the COCO da-
taset (Lin et al., 2014). The COCO dataset has 120K
unlabeled images (unlabeled2017) which is useful
for semi-supervised learning on COCO. We train our
semi-supervised model with the union of 80k train
images and a 35k sub-set of val images (trainval35k)
as the labeled set and with 120K unlabeled2017 as the
unlabeled set. We report results on the remaining 5k
subset of val images (minival) by comparing with the
baseline supervised model trained on trainval35k.
To evaluate detection performance, we report the
mean average precision (mAP%) (Everingham et al.,
2015).
4.1.2 Training
We have experimented with the Darknet architec-
ture with parameters initialized from the Image-
Net pretrained model used in (Redmon and Farhadi,
2016). We train the YOLOv2 model with the scale of
(416x416). For SGD, we use a mini-batch of 64 ima-
ges and initial learning rate of 0.0001, multiplying the
learning rate by 0.1 at 80 and 120 epochs. We use mo-
mentum of 0.9 and a weight decay of 0.0005. We pre-
sent the ratio of unlabeled images vs. labeled images
in the mini-batch as parameter γ. We set γ = 0 (no un-
labeled images) for the first 12 epochs; from the 13th
epoch we set γ = 0.5 (32 unlabeled + 32 labeled ima-
ges). We used the same setting for both Pascal VOC
and COCO datasets.
4.2 Results
4.2.1 Pascal VOC Dataset
We investigate the influence of the proportion of labe-
led data in the training set. As we state that the semi-
supervised setting requires fewer labeled images and
many unlabeled images, we have experimented with
five different proportions of labeled images: 10, 20,
30, 40 and 50%. Results are summarized in Figure
2. We can see that the semi-supervised learnings with
additional unlabeled images give better results com-
pared to the supervised learning with labeled images
alone in every proportion.
0.5
1
0.6
0.65
0.7
0.75
Labeled image proportion
mAP
supervised
our approach
Figure 2: Results of semi-supervised detection on the Pas-
cal VOC test set for different settings of the proportion of
labeled data.
Table 1: Comparison between our method with the mix-
supervised method in (Yan et al., 2017). Results represent
the improvement of the two methods compared to their fully
supervised versions.
Improvement of mAP
(Yan et al., 2017) 1.80%
Semi-supervised (our) 1.64%
Existing works often focus on the mix-supervised
object detection by using instance-level labels and
image-level labels (they call it semi-supervised lear-
ning, but it is different from our setting where unla-
beled images are used instead of image-level labeled
images). Therefore, we compare our method with a
recent mix-supervised method (Yan et al., 2017) in a
fair condition on the Pascal VOC dataset (Table 1). In
(Yan et al., 2017), authors report the good result of
the detector training with 40% instance-level labels
and 60% weak labels compared to the fully supervi-
sed training with 100% instance-level labels. In our
experiment, using the same proportion of 40% labe-
led images and 60% unlabeled images, we achieve an
improvement of 1.64% mAP compared to the super-
vised detector using only 40% labeled images. This
improvement almost matches the 1.8% mAP impro-
vement of the mix-supervised approach reported in
(Yan et al., 2017).
In Table 2, we show the results for different ver-
sions of our semi-supervised learning compared to
supervised learning which confirm the advantages of
the proposed method. With 10% of labeled training
images out of the total training images, we obtain de-
tection performance improvement on the Pascal VOC
test set from 59.95% to 64.40% mAP. In our Algo-
rithm 1, if we remove the bounding boxes estimation
and the localization optimization for unlabeled data,
we have a lower detection performance of 62.19%
mAP with the same setting.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
294

Figure 3: First image is the ground-truth; second image is the detection of the supervised model; third image is the detection
of the semi-supervised model. The predictions may be right (first row), or wrong (wrong class, the next row), or maybe right
but the objects are not included in the ground-truth annotations (last row).
Table 2: Detection results for different versions of our semi-
supervised models (v1, v2) and supervised learning on the
Pascal VOC dataset.
Supervised v1 v2
Cls optimization
√ √
Loc optimization
√
VOC2007 mAP% 59.95 62.19 64.40
Table 3: Comparison between semi-supervised lear-
ning (trainval35k+unlabeled2017) with supervised learning
(trainval35k) on the COCO dataset. Results on minival test
set.
Supervised Semi-supervised
mAP[0.50:0.95] 22.4% 23.1%
4.2.2 COCO Dataset
In the Table 3, we compare our semi-supervised
model with the baseline supervised model trained
on 115K labeled images (trainval35k). Our semi-
supervised model is trained on the same labeled ima-
ges with the additional 120K unlabeled images (un-
labeled2017). Our semi-supervised model has 23.1%
mAP on the minival test set (5K images), higher than
the supervised model which has 22.4% mAP, but with
only an improvement of 0.7%. The reason for this
small improvement due to the large size of the labe-
led images in the training set. In semi-supervised lear-
ning, we often have fewer labeled images but require
many unlabeled images to have an important impact
of the unlabeled images.
4.3 Qualitative Detection Result
In Figure 3 we show examples of the results obtai-
ned by the semi-supervised model and the supervised
model on the Pascal VOC 2007 test set. The super-
vised model is trained on 10% labeled images of the
training set. The semi-supervised model is trained on
10% labeled images and 90% unlabeled images of the
training set. We have found that while the supervised
model merely recognizes what it is taught, the semi-
supervised model can guess additional objects. Ho-
wever, it can guess them right (first row), or wrong
(wrong class, the next two rows), or maybe right but
the objects are not included in the ground-truth anno-
tations (last two rows). The problem in the last two
rows can lead to a lower mAP, that means our semi-
supervised model may have better performance than
presented in Table 2.
5 CONCLUSIONS
We have investigated a semi-supervised object de-
tection approach with instance-level labeled ima-
ges and unlabeled images. We treat the object de-
tection model as a latent variable model in which the
instance-level labels are missing values. Our experi-
ments on the Pascal VOC dataset have shown that: (1)
Even the unlabeled images can improve the detection
performance as the weakly labeled images. (2) Using
the unlabeled images to optimize both the classifica-
tion task and localization task is better than optimi-
zing the classification task alone. (3) In the real-case
scenario, we can save effort by annotating fewer ima-
ges and then use the raw images to improve the de-
tection performance.
Semi-supervised Object Detection with Unlabeled Data
295

ACKNOWLEDGEMENTS
This work is supported by the Research National
Agency (ANR) in the framework of the 2017 Lab-
Com program (ANR 17-LCV2-0006-01).
REFERENCES
Bishop, C. M. (2006). Pattern Recognition and Machine Le-
arning (Information Science and Statistics). Springer-
Verlag, Berlin, Heidelberg.
Everingham, M., Eslami, S. M., Gool, L., Williams, C. K.,
Winn, J., and Zisserman, A. (2015). The pascal vi-
sual object classes challenge: A retrospective. Int. J.
Comput. Vision, 111(1):98–136.
Everingham, M., Van Gool, L., Williams, C. K. I., Winn,
J., and Zisserman, A. (2010). The pascal visual ob-
ject classes (voc) challenge. International Journal of
Computer Vision, 88(2):303–338.
H
¨
ausser, P., Mordvintsev, A., and Cremers, D. (2017). Lear-
ning by association - A versatile semi-supervised trai-
ning method for neural networks. In CVPR 2017, Ho-
nolulu, HI, USA, 2017, pages 626–635.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. B. (2017).
Mask R-CNN. CoRR, abs/1703.06870.
Kumar, M. P., Packer, B., and Koller, D. (2010). Self-paced
learning for latent variable models. In Neural Infor-
mation Processing Systems - Volume 01, NIPS’10, pa-
ges 1189–1197, USA. Curran Associates Inc.
Lee, D.-H. (2013). Pseudo-label : The simple and efficient
semi-supervised learning method for deep neural net-
works.
Lin, T.-Y., Goyal, P., Girshick, R. B., He, K., and Doll
´
ar, P.
(2017). Focal loss for dense object detection. 2017
IEEE International Conference on Computer Vision
(ICCV), pages 2999–3007.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P., Ra-
manan, D., Dollr, P., and Zitnick, C. L. (2014). Micro-
soft coco: Common objects in context. In European
Conference on Computer Vision (ECCV), Zrich. Oral.
Little, R. J. A. and Rubin, D. B. (1986). Statistical Analysis
with Missing Data. John Wiley & Sons, Inc., New
York, NY, USA.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). Ssd: Single shot
multibox detector. arXiv preprint arXiv:1512.02325.
Papandreou, G., Chen, L.-C., Murphy, K. P., and Yuille,
A. L. (2015). Weakly-and semi-supervised learning
of a deep convolutional network for semantic image
segmentation. In IEEE International Conference on
Computer Vision, ICCV ’15, pages 1742–1750, Wa-
shington, DC, USA. IEEE Computer Society.
Redmon, J. and Farhadi, A. (2016). YOLO9000: Better,
Faster, Stronger.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
R-CNN: Towards Real-Time Object Detection with
Region Proposal Networks. In Cortes, C., Lawrence,
N. D., Lee, D. D., Sugiyama, M., and Garnett, R., edi-
tors, Advances in Neural Information Processing Sys-
tems 28, pages 91–99. Curran Associates, Inc.
Rosenberg, C., Hebert, M., and Schneiderman, H. (2005).
Semi-supervised self-training of object detection mo-
dels. In WACV/MOTION’05 - Volume 01, pages 29–
36, Washington, DC, USA. IEEE Computer Society.
Sajjadi, M., Javanmardi, M., and Tasdizen, T. (2016). Re-
gularization with stochastic transformations and per-
turbations for deep semi-supervised learning. In Neu-
ral Information Processing Systems 2016, December
5-10, 2016, Barcelona, Spain, pages 1163–1171.
Yan, Z., Liang, J., Pan, W., Li, J., and Zhang, C.
(2017). Weakly- and semi-supervised object detection
with expectation-maximization algorithm. CoRR,
abs/1702.08740.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
296
