
The Price of Anarchy: Centralized versus Distributed Resource
Allocation Trade-offs
Jinhong K. Guo
1
, Alexander Karlovitz
2
, Patrick Jaillet
3
and Martin O. Hofmann
1
1
Lockheed Martin Advanced Technology Laboratories, 3 Executive Campus, Suite 600, Cherry Hill, NJ 08002, U.S.A.
2
Department of Mathematics, Rutgers University, Piscataway, NJ 08854, U.S.A.
3
Department of Electrical Engineering and Computer Science, Massachusetts Institute of Technology,
Cambridge, MA 02139, U.S.A.
Keywords:
Resource Allocation, Resource Optimization, Auction-based Approach, Decentralized Resource Allocation.
Abstract:
Optimizing decision quality in large scale, distributed, resource allocation problems requires selecting the
appropriate decision network architecture. Such resource allocation problems occur in distributed sensor net-
works, military air campaign planning, logistics networks, energy grids, etc. Optimal solutions require that de-
mand, resource status, and allocation decisions are shared via messaging between geographically distributed,
independent decision nodes. Jamming of wireless links, cyber attacks against the network, or infrastructure
damage from natural disasters interfere with messaging and, thus, the quality of the allocation decisions. Our
contribution described in the paper is a decentralized resource allocation architecture and algorithm that is
robust to significant message loss and to uncertain demand arrival, and provides fine-grained, many-to-many
combinatorial task allocation. Most importantly, it enables a conscious choice of the best level of decentraliza-
tion under the expected degree of communications denial and quantifies the benefits of approximating status
of peer nodes using proxy agents during temporary communications loss.
1 OVERVIEW
Teams of autonomous sensor assets are expected to
self-organize to perform a variety of spatially dis-
tributed sensing tasks, such as search and rescue,
surveillance and environmental monitoring. Chal-
lenging characteristics of these applications include
incomplete and uncertain status (current tasks, as-
set status, etc.), time-sensitive objectives (re-direction
during mission execution, failed asset replacement),
and limited and varying communication topologies
between assets and command and control nodes. De-
centralized command and control promises greater
agility and resilience in communication contested en-
vironment. To decentralize safely, one has to under-
stand the trade-offs between agility and quality.
The contribution of this work is in characteriz-
ing the trade-off of decentralization using a robust,
probabilistic, auction-based resource allocation archi-
tecture with a variable number of distributed auc-
tioneer nodes, each responsible for optimally allocat-
ing a subset of tasks to a subset of assets. We use
a many-to-many, combinatorial task allocation and
scheduling algorithm that is robust to uncertain fu-
ture demand and uses expressive cost formulations
to model mobile sensors with variable costs that de-
pend in travel distance and sensor quality that varies
with environmental conditions. Our algorithm is ro-
bust against communication interruptions and mini-
mizes ripple effects due to unexpected tasks and re-
source failures. To further reduce the effect of in-
termittent communication failures, we employ proxy
agents which bid on behalf of their remote assets. Our
experiments show that proxy agents improve alloca-
tion success rates. Due to the complexity of our prob-
lem, unmatched in other published work, a rigorous
and tractable mathematical analysis is impossible. In-
stead, we derived theoretical bounds on a simplified
version and validated our algorithm’s performance.
2 RESOURCE ALLOCATION
We assume m heterogeneous agents, each represent-
ing an asset that can possess multiple capabilities. n
tasks arrive dynamically over time and are located in
a given geographical region G. In each area G, one
of the agents assumes the role of auctioneer. Upon
146
Guo, J., Karlovitz, A., Jaillet, P. and Hofmann, M.
The Price of Anarchy: Centralized versus Distributed Resource Allocation Trade-offs.
DOI: 10.5220/0007345701460153
In Proceedings of the 11th International Conference on Agents and Artificial Intelligence (ICAART 2019), pages 146-153
ISBN: 978-989-758-350-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

arrival of a task, the auctioneer announces the task
and agents bid to perform the task. The auctioneer
determines the winner and assigns the task to one or
several bidders. A task is assigned to multiple agents
when the task requires the combined capabilities of
multiple agents. The completion of an assigned task
incurs a cost and earns a reward for the agent. The
goal is to maximize net revenue, the sum of reward
minus cost for all agents and tasks, over time.
Task: A task requires a number of capabilities
to be fulfilled by one or more agents. Each ca-
pability has an associated timeline and a minimum
proficiency, which allowes suboptimal but accept-
able use of less capable resources. For shared ca-
pabilities, the proficiency requirement is used to in-
dicate the minimum capacity needed, e.g., the por-
tion of bandwidth needed from a communication
channel. Therefore, we represent task j as a tuple
(t
j
,l
j
,req
j
,d
j
,r
j
,Pr
j
,T
j
,T
0 j
), where, t
j
∈ R
+
is the
release time of task j and l
j
∈ G is the location of task
j. req
j
∈ [0,1]
3×k
is a 3 × k matrix, describing the re-
quired capabilities for performing task j. k is the to-
tal number of capabilities defined for the application,
and each specific capability is identified by its column
position in the matrix. The values in the first row in-
dicates the required proficiency level for the required
capabilities. The second row is a boolean, 0 (false) or
1 (true), that indicates if the capability is shared. If
it is shared, then the corresponding value in the third
row represents the minimum required capacity level.
d
j
∈ R
k
+
is a k-vector of time durations for task j along
its k dimensional requirements req
j
. r
j
∈ R
+
is the
reward for the completion of task j. Pr
j
∈ R
+
is the
priority of task j, T
j
∈ R
k
+
is a k-vector of deadlines
before which task j’s requirements must be assigned,
T
0 j
∈ R
k
+
is a k-vector of the requested earliest starting
times for task j’s required capabilities.
Agent: m agents, each possessing a set of capabili-
ties, are assigned to one or more groups. An agent
is defined by (l
i
,g
i
,cap
i
,s
i
), where l
i
∈ G is the loca-
tion of agent i, g
i
is the group identifier of agent i, and
cap
i
∈ [0,1]
3×k
is a 3 × k matrix with values of 0 to 1
describing the qualification of agent i along k capabil-
ity dimensions, similar to the capability requirement
in the task representation, with the third row repre-
sents an agent’s capability capacity. s
i
is the speed of
the agent.
Objective: The completion of task j requires that the
set of agents i
1
,i
2
,i
3
,... assigned to it collectively
have qualifications that meet req
j
. The objective of
the optimization problem is to maximize total net rev-
enue (reward minus cost) over the n tasks. The re-
source allocation problem can be written as a mixed-
integer program:
max
x,τ
n
∑
j=1
m
∑
i=1
k
∑
p=1
k
∑
q=1
R
pq
i j
x
pq
i j
s.t.H(x,τ) ≤ d
x ∈ {0,1}
n,m,k,k
,τ ∈ {R
+
}
n,m,k,k
where x ∈ {0, 1}
n,m,k,k
, is a set of binary decision
variables x
pq
i j
with x
pq
i j
= 1 indicates that the capability
p of agent i will serve the capability requirement q of
task j. τ ∈ {R
+
}
n,m,k,k
is the set of real-positive deci-
sion variables that indicates when agent i capability p
will serve task j requirement q. R
pq
i j
is the revenue of
serving task j requirement q with agent i capability p.
Assuming the total reward associated with the com-
pletion of task j is r
j
and the cost of performing task
j by agent i is c
i j
, R
pq
i j
= r
pq
i j
−c
pq
i j
with r
pq
i j
and c
pq
i j
de-
fined as a fraction of r
j
and c
i j
. H(x,τ) defines a set
of linear and possibly non-linear constraints that cap-
tures transition dynamics, resource, spatial and tem-
poral limitation, etc., that are bounded by some crite-
ria d. The constraint functions depend on both of the
decision variables x and τ, making this mixed-integer
problem even more difficult to solve.
Our algorithm enforces both soft and hard con-
straints. The hard constraints include the following.
Capability: an agent is only considered for a task if it
has the required capability, sufficient proficiency, and
the required capacity, if it is a shareable capability.
Therefore, this defines three constraints, such that
(req
1
j
∧ I
q
) · (cap
1
i
∧ I
p
) > 0
(req
1
j
∧ I
q
) − (cap
1
i
∧ I
p
) ≤ 0
(req
3
j
∧ I
q
) − (cap
3
i
∧ I
p
) ≤ 0 i f req
2,q
j
= 1
req
c
j
is the c
th
row of matrix req
j
and cap
c
i
is
the c
th
row of matrix cap
i
. I
d
is a vector with
the d
th
element being 1 while the other elements
are 0. q
2,q
j
is the q
th
element of the second row of req
j
.
Temporal and spatial: an agent can perform differ-
ent tasks concurrently only if these tasks ( j
1
and j
2
)
are geographically collocated (within a radius), i.e.,
kl
j
1
− l
j
2
k ≤ radius
An agent can bid for a task only if it can reach the
requested location before the task starts, i.e., there is
sufficient time (T ) between the schedule of j
1
and j
2
by agent i. Note that T is determined by both the task
locations and the speed of the agent.
|τ
i,j1
− τ
i,j2
| > T, i f kl
j1
− l
j2
k > radius
The Price of Anarchy: Centralized versus Distributed Resource Allocation Trade-offs
147
Dependency (hard): if some of the requirements
(possibly across multiple tasks) are deemed depen-
dent, all those capability requirements must be allo-
cated together or none at all. Let Ψ be the set of pairs
( j, q) (task j, capability requirement q) defining such
a dependency set,
m
∑
i=1
k
∑
p=1
x
pq
i j
=
m
∑
i=1
k
∑
p=1
x
pq
0
i j
0
∀pairs ( j, q),( j
0
,q
0
) ∈ Ψ
Same Agent: a set of capabilities (possibly across
multiple tasks) has to be performed by the same agent.
Let Ψ define the set of pairs ( j, q) (task j, capability
requirement q) to be performed by the same agent,
∑
i
∑
p
∑
( j,q)∈Ψ
x
pq
i j
≤ 1
Soft constraints are implemented as adjustments
to the revenue function. To enforce a soft constraint,
the revenue is adjusted to be
R
pq
i j
= r
pq
i j
− c
pq
i j
+ ∆
pq
i j
where ∆
pq
i j
is calculated depending on the constraints.
The soft constraints are designed for:
Honoring Priority: higher priority tasks have a bet-
ter chance of being assigned by increasing revenue.
Therefore, ∆
pq
i j
is chosen to be proportional to a level
of priority Pr
j
, i.e., ∆
pq
i j
∝ Pr
j
Anticipating Future Needs: reserve assets for future
high priority tasks based on an estimated distribution
of future task arrivals. The adjustment on the revenue
R
pq
i j
uses an expectation E(y) of future high priority
tasks, i.e., ∆
pq
i j
∝ −E(y)
Minimizing Ripple Effects: cost of anticipated addi-
tional allocation changes due to the allocation change
under consideration. Assuming E(z) quantifies the an-
ticipated changes, ∆
pq
i j
∝ −E(z)
Dependencies (soft): increasing the chances of the
assignment of associated capabilities if some of them
are assigned i.e., ∆
pq
i j
∝
∑
i
∑
p
∑
( j,q)∈Ψ
x
pq
i j
As illustrated above, the mixed-integer problem is
very difficult to solve. We employ a single-round auc-
tion where one or more auctioneers announce tasks to
their respective groups of agents, agents with appro-
priate capabilities bid (whether they are already busy
or not), the auctioneers optimize many-to-many as-
signments of task capabilities to agent capabilities,
and announce the allocation. We use a greedy win-
ner determination algorithm that is based on a con-
strained clustering algorithm (Tung et al., 2001), sim-
ilar to the greedy approach developed in (Greene and
Hofmann, 2006), but allowing resource sharing over
time. Each agent defines a cluster of its capabilities.
An additional cluster consists of all the unallocated
capability requirements (of all tasks). Task require-
ments are moved among agent clusters based on rev-
enue improvement, but honoring constraints, until a
local optimum is achieved.
Group membership is dynamically determined by
geographic proximity within the range of communi-
cation. When an agent moves beteween groups, it
gives up its unfulfilled previous assignments so that
the previous auctioneer can attempt to reassign them
to other agents in its group.
3 PROXY AGENTS
Limited ad-hoc and varying communication topolo-
gies between assets (agents) and command and con-
trol nodes (auctioneer) significantly affect resource
allocation performance for both centralized and dis-
tributed architectures. To lessen the effect of failed
communication preventing agents from participating
in an auction, we employed proxy agents. The proxy
agents, which reside within the auctioneer, keep sta-
tus of the agents they represent. The auctioneer tracks
the connectivity status of the real agents such that if an
agent has repeatedly failed to communicate with the
auctioneer, its proxy agent will not be allowed to par-
ticipate in future auctions until the agent is heard from
again. In the experiments described in this paper, the
agents send pings every t
wait
= 100 ms. The auction-
eer counts every t
wait
ms if it does not receive a ping
from an agent. If this count gets above maxCnt = 20
for some agent, the auctioneer does not include that
proxy agent in any bids until it receives another ping.
1 2 3 4 5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Number of groups
% Capabilities Completed
Communications Denial (Level 1)
With proxies
Without proxies
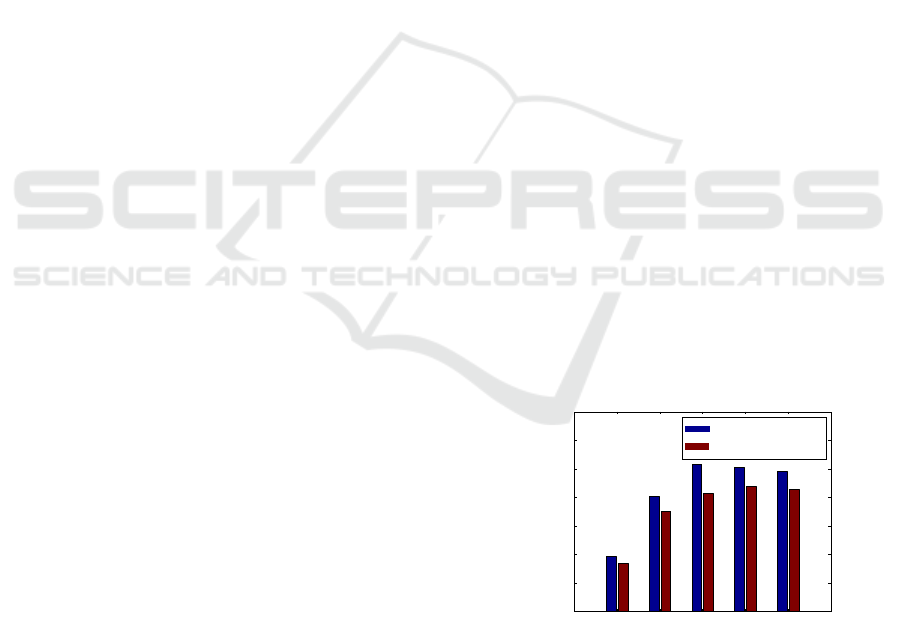
Figure 1: Capability allocation success with and without
proxy agents: number of agents = 30, number of pre-
assigned tasks = 30, number of new tasks = 30, Task du-
ration = 1000ms, New task arrival Poisson mean = 50ms.
Experiment results have shown (Figure 1) that
when probability of communication failure is high,
proxy agents improve the performance of task allo-
cation rates. This is implemented by incorporating
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
148

the expectation of successful communication into the
utility function (for simplicity denoted by R, omitting
the indices for tasks and agents): R
0
= p·R, where p is
the probability that agent i will receive the assignment
should it win the bid for performing capability j. p is
calculated using the latest n pings between the proxy
agent and its agent. p =
∑
n
k=1
α
k
× p
k
,
∑
n
k=1
α
k
= 1,
with α
k+1
= f ×α
k
,k = 1,. .. ,n−1 to favor the lastest
ping.
p
k
=
1 if k
th
ping succeeded
0 otherwise
In our experiments, α
1
= 0.2, f = 0.8, and n = 20.
4 THEORETICAL BOUNDS
Due to the complexity of the problem addressed in
this paper, a mathematical formulation is impossi-
ble except for a simplified version which we used
to derive theoretical bounds and validate algorithms.
Theoretical bounds help us understand empirical re-
sults and design systems with consideration of per-
formance bounds.
First, given some task arrival intervals and task
durations over a given geographical area, we would
like to know the smallest number of agents needed
for the system to work properly. We consider the sim-
plest possible analytical framework within our overall
problem setting.
In particular we will assume that: (1) Task re-
quirements (req
j
’s) and agent qualifications (cap
i
’s)
are unidimensional (i.e., k = 1). (2) Release times
of the tasks are random and follow a Poisson pro-
cess of parameter λ. (3) The duration of the tasks
are i.i.d. exponential with parameter µ (Model 1), or
uniform over the interval [0, 2/µ] (Model 2) [expected
task duration is 1/µ under both models]. (4) There are
m agents, initially distributed at random over a unit
square. (5) At any time, an agent is either busy or
available. (6) Upon arrival of a task, if no agents are
available then the task is dropped, otherwise it is as-
signed to one of the free agents uniformly at random.
(7) A free agent, upon assignment of a task, can start
working on it immediately, irrespective of his/her lo-
cation. (8) We observe the system over a long period
of time so that the observed number of tasks n is very
large (the system is in a “steady-state”).
Result 1: The probability that all agents are busy
when a new task arrives is given by
1
1
Due to space limitation, a detailed proof is omitted.
Note that this is closely related to the classical Erlang’s loss
formula, developed during the first decade of the 20th cen-
(λ/µ)
m
/m!
m
∑
i=0
(λ/µ)
i
/i!
For a given λ and µ, this formula allows us to find
the minimum number of agents so that the fraction of
tasks being allocated is above a given level of service.
Result 1 remains valid, under some scaling of the pa-
rameters, e.g., for a given ratio λ/µ, the region can
be any compact region, and not just the unit square.
More interestingly, Result 1 can also be shown to re-
main valid even when the duration of serving a task
also includes moving to the location of the task, as
long as it is driven by independent (between tasks)
random variables following any general distribution.
with mean 1/µ (not necessarily exponential). For ex-
ample, this would be the case when the task is allo-
cated at random uniformly among any free agents, ir-
respective of their geographical location. In that case,
under the assumption that the overall region of inter-
est is the square [0,l]
2
, and assuming that any agents
move at constant speed s, the previous formula be-
comes
(λ(0.52l/s + 1/µ))
m
/m!
m
∑
i=0
(λ(0.52l/s + 1/µ))
i
/i!
Result 1 provides a valid upper bound if an alloca-
tion based on shortest distance will lead to a smaller
number of agents for the same level of service.
Result 2 (first generalizations): Now assume that in-
stead of being dropped, a new task, finding all agents
busy, is put on a waiting list and then assigned to the
first available agent. Then under Model 1, the system
will reach steady-state if λ/mµ < 1. We have:
a) The probability p
j
that there are j tasks in the sys-
tem at any time is given by
p
j
=
p
0
(λ/µ)
j
/ j! for 0 ≤ j ≤ m − 1
p
0
(λ/µ)
j
/(m
j−m
m!) for j ≥ m
where
p
0
= [
m−1
∑
j=0
(λ/µ)
j
/ j!+(λ/µ)
m
/(m!(1−λ/mµ))]
−1
b) The average number of tasks waiting in the system
is:
n = p
0
(λ/µ)
m
(λ/mµ)/(m!(1 − λ/mµ)
2
)
c) The average waiting time of a task is
w = n/λ = p
0
(λ/µ)
m
(λ/mµ)/(m!(1−λ/mµ)
2
)/λ
tury by Erlang, a Danish engineer who was working on siz-
ing up telephone systems.
The Price of Anarchy: Centralized versus Distributed Resource Allocation Trade-offs
149
From b), for a given λ and µ, we can choose m so
that the average number of tasks waiting in the system
at any time is below a desired level and/or the average
waiting time of a task is below a prescribed level.
Result 3 (second generalizations): We now consider
the case where the allocation of a new task to a given
agent is done proportionally to the shortest distance
among all free agents. A new task, finding all agents
busy, is put on a waiting list and then assigned to the
closest available agent. In that case,
d) Under heavy-traffic approximation, when
λ/mµ → 1, the average waiting time of a task is
given by
w ≈ (1/λ + λσ
2
/m)/2(1 − λ/mµ)
where σ
2
is the variance of the service time under
the chosen policy (i.e. travel time plus execution
time of the task).
Assuming a uniform spatial distribution of free
agents and unit speed over the unit square, we would
have σ
2
≈ 0.07. The value in d) shows that the av-
erage waiting time is dominated by the term (1 −
λ/mµ)
−1
as λ/mµ → 1.
We conducted experiments to co-validate the the-
oretical bounds and our constraint resource allocation
algorithm (setting the configuration to match the sim-
ple framework).
0 5 10 15 20 25 30 35
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Number of Agents
% Tasks Completed
Exponential Task Duration, Mean 60 Seconds,
InterArrival Mean 3 Seconds
Theoretical
Algorithm 1
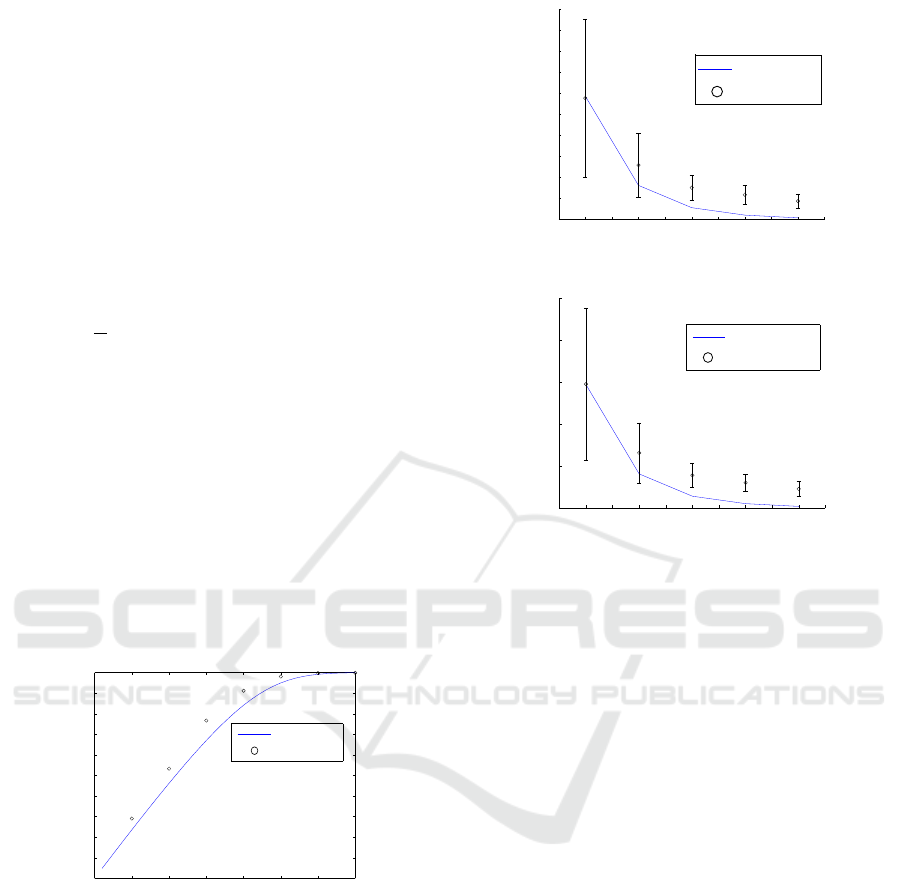
Figure 2: Empirical results and theoretical bound on mini-
mum number agents needed to ensure the fraction of tasks
being allocated (i.e. not dropped) is above a given level
of service with task duration exponentially distributed with
mean 60s; task arrival with Poisson mean 3s and λ/µ = 20.
Figure 2 shows results of empirical runs (labeled
Algorithm 1) overlaid over theoretical curves of Re-
sult 1. As illustrated, the empirical results fit well
with the theoretical lower bound. A relaxation of the
time threshold in our algorithm implementation after
which a task was dropped if not assigned may have
contributed to the slightly better performance than the
theoretical analysis suggests.
Figure 3 shows the empirical results overlaid over
the theoretical curves for Result 2. For empirical data
6 7 8 9 10
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Number of Agents
Average Number of Waiting Tasks
Theoretical
Algorithm 1
(a) λ = 1/500,µ = 1/2500
6 7 8 9 10
0
500
1000
1500
2000
2500
Number of Agents
Average Task Wait Time (ms)
Theoretical
Algorithm 1
(b) λ = 1/500,µ = 1/2500
Figure 3: Empirical and theoretical results on (a) average
number of waiting tasks; (b) average waiting time per task.
points, the vertical bars show standard deviation about
the mean over multiple runs. Note that for the system
to reach a steady-state, λ/mµ < 1 must hold. Also
note that the closer to the boundary condition (m =
1), the larger the standard deviation is.
5 RELATED RESEARCH
Most work on distributed systems focuses on collab-
oration algorithms and strategies (Spall, 2012), such
as routing and positioning UAVs to perform a spe-
cific task (Bednowitz et al., 2014). Only a few re-
searchers have investigated the trade-offs of decen-
tralization, (Cicalo et al., 2011), and, in contrast to our
work, the performance tradeoff is generally analyzed
without considering communications degradation or
adversary interference (Tsitsiklis and Xu, 2011). A
key reason is that it is extremely difficult to mathe-
matically model the complex aspects of the problem.
In this paper, we specifically address communication
failure and empirically explore trade-offs.
A number of market-based algorithms for collab-
orative multi-agent planning have been developed,
benefiting from their simplicity and low computa-
tion and communication costs ((Zheng and Koenig,
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
150
2009)(Zheng and Koenig, 2010)(Hong and Gordon,
2011)). However, most existing market-based al-
gorithms cannot re-evaluate the existing allocations
when new tasks need to be inserted (Mauadi et al.,
2011). In contrast to algorithms for homogeneous
agents (Amador et al., 2014), our algorithm also ap-
plies to heterogeneous agents. Uniquely, our agents
are modeled by a set of capabilities with individu-
ally variable proficiencies. Their bids are relative
to spatial and temporal constraints and dependencies
of the roles to be fulfilled. Most research consid-
ers only assignments of one agent to one task, one
agent to multiple tasks (Liu and Shell, 2011), or many
agents to one task (Zhang et al., 2012), while our ap-
proach handles many-to-many task assignments with
different capability mixes with varying proficiencies.
Also, unlike most techniques (Roggendorf and Bel-
tran, 2006)(Bonacquisto et al., 2014) the bidding
agents in our auction algorithm represent unselfish
agents that share the common goal of achieving over-
all maximum revenue. Our agents do not lower their
bids for highly contended resources, e.g., caching
(Wang and Martinez, 2015). Instead, our robust win-
ner determination algorithm accounts for such refine-
ments. Similar to the consensus-based approach in
Choi et al. (Choi et al., 2009), our approach is robust
to network changes, but also adds proxy agents. Un-
like more analytical work (Lagoudakis et al., 2004),
our algorithm does not provide a guarantee on the
quality of its allocations. Instead, we provided the-
oretical bounds.
6 EMPIRICAL ANALYSIS
The goal of this empirical analysis is to explore
the trade-off between centralized and distributed ar-
chitectures without the simplification that theoretical
analysis is forced to make. To achieve this goal, we
simulated various experiment settings under different
communication conditions. We varied the given max-
imum number of different capability types M, collec-
tively required by the tasks (and collectively offered
by the agents), and randomized task characteristics,
the number of groups that the agents are divided into,
and varied communication conditions. We imple-
mented agent communications using the Java Agent
Development Framework (JADE) (Bellifemine et al.,
2007) and developed a module to add interference to
the communication between the agents using a com-
munication model described below.
Our assumption is that the farther a message has
to travel, the more likely the message is to fail. So
is the closer the sender is to a communication jam-
Table 1: Exemplar parameters used in defining different
communication levels.
Level a
1
b
1
e
1
f
1
a
2
b
2
e
2
f
2
1 0.8 0.001 0.1 0.001 0.5 0.01 0.5 0.01
2 0.7 0.001 0.2 0.001 0.5 0.01 0.6 0.01
3 0.6 0.001 0.3 0.001 0.4 0.0075 0.6 0.0075
4 0.5 0.001 0.5 0.001 0.3 0.005 0.6 0.005
5 0.5 0.01 0.5 0.01 0.3 0.005 0.7 0.005
6 0 0 1 0 0 0 1 0
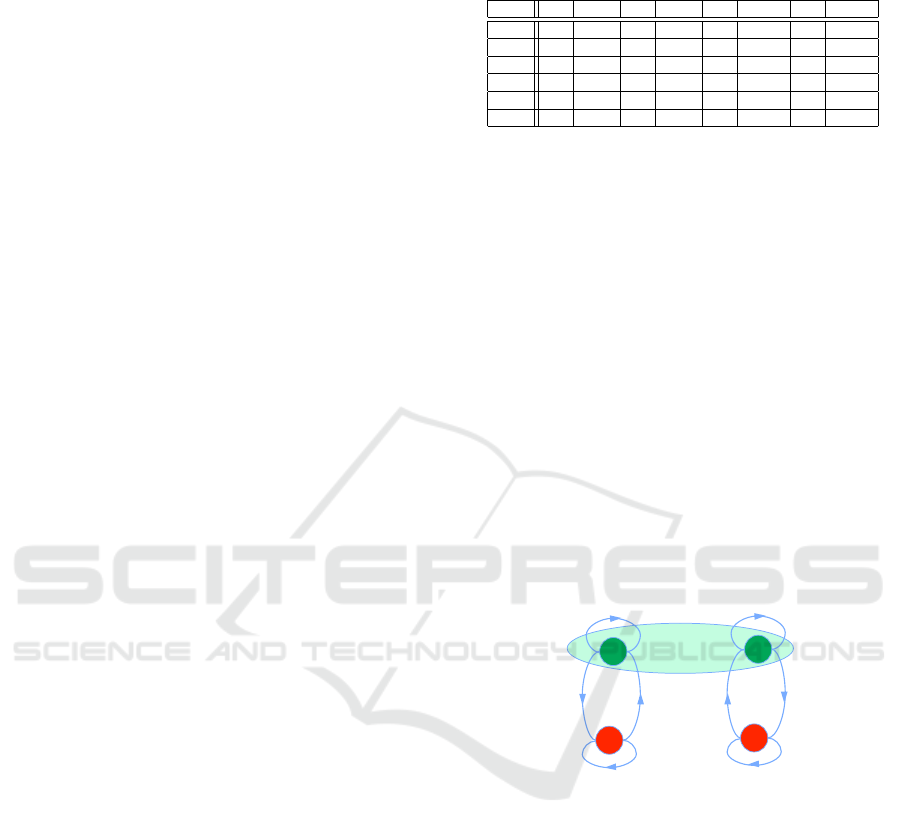
mer. We model communication failures with a two
stage Gilbert-Elliott channel (Kong, 2002). The chan-
nel either stays put or transitions between a “good”
and a “bad” state. We assume that when the channel
is in a bad state, the agent cannot send or receive its
message. The agent will repeatedly resend the mes-
sage until either the message is sent successfully or
the message times out (upon which it is dropped). In
our experiment, in addition to the reliability of the
communication channel, we need to consider adver-
sary interference. Therefore, the communication be-
tween the two agents will have to be in a compounded
“good” state both in terms of the normal communica-
tion channels as well as adversary interference. This
is illustrated in Figure 4, with green being good state
and red being bad state. The transition probabilities
α and β are parameterized with distances d
1
and d
2
,
which are distances to the closest jammer and of the
sender-receiver distance, respectively.
!
"
#$
"
%&
'
"
#$
"
%&
"(!
"
#$
"
%&
"('
"
#$
"
%&
!
)
#$
)
%&
'
)
#$
)
%&
"(!
)
#$
)
%&
"('
)
#$
)
%&
Figure 4: Communication model between two agents.
In the current experiment, the following parame-
ters are used.
α
1
(d
1
) = a
1
− b
1
∗ d
1
, β
1
(d
1
) = e
1
+ f
1
∗ d
1
α
2
(d
2
) = a
2
+ b
2
∗ d
2
, β
2
(d
2
) = e
2
− f
2
∗ d
2
We divided the communication levels into 1,2, .. ., 6,
with 6 indicating perfect communications. The corre-
sponding parameters are shown in Table 1.
The experiment results shown below are averaged
over at least 100 runs of the same parameter setup to
get statistically significant results. Our experiments
have shown that above 80 repetitions, the results reach
a stable state.
As communication degrades, messages - includ-
ing those with task requirements, bidding requests,
acknowledgments, etc - are being dropped, affecting
The Price of Anarchy: Centralized versus Distributed Resource Allocation Trade-offs
151
the quality of the results. For the following set of ex-
periments, we used the following set of parameters
unless otherwise stated. The number of agents is 60.
There were 30 preassigned tasks before 100 pop-up
tasks started to arrive in sequence. Each task has a
duration requirement of 1000ms, and the pop-up ar-
rival times follow a Poisson distribution with mean
50ms. The axis labeled “comms level” represents the
communication condition divided into 6 levels as de-
scribed above. The other horizontal axis represents
the number of groups that the 60 agents are divided
into. The vertical axis represents the percentage of
tasks (out of all 130) that are successfully allocated.
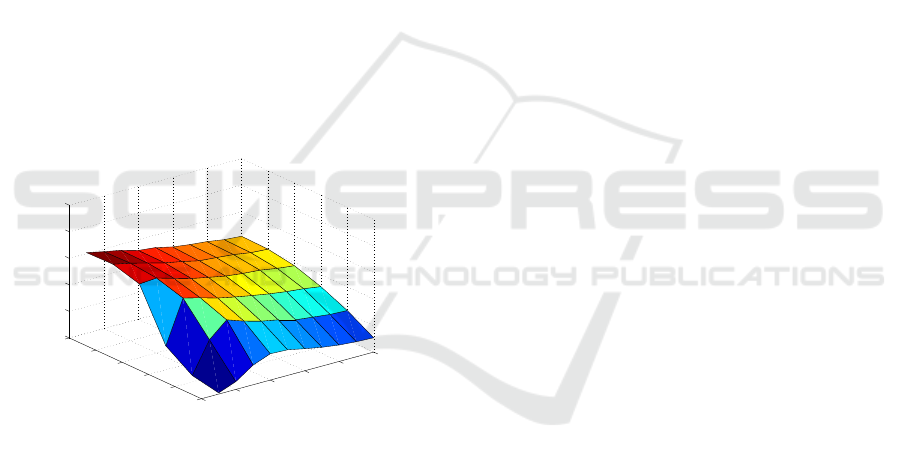
Figure 5 shows the result of task completion under
different communication conditions with different de-
grees of decentralization. As illustrated in Figure 5, a
centralized system works best under perfect and rel-
atively good communication conditions, and perfor-
mance degrades as the number of groups increases.
However, as communication conditions worsen, dis-
tributed systems start to outperform the centralized
system. It is further clear that an optimal point of de-
centralization exists beyond which, as the group num-
ber increases, the performance starts to degrade again.
0
2
4
6
8
10
1
2
3
4
5
6
0
0.2
0.4
0.6
0.8
1
Number of Groups
Cap Types: 5, Max Caps Per Agent: 5
Comms Level
% Tasks Totally Completed
Figure 5: Tasks that were completely executed (all capabil-
ities fulfilled).
Due to capability mismatches of and scheduling
conflicts, agents can be idle at times. Communica-
tion failures also cause agents to be idle even when
their capabilities are needed. Some agents either fail
to participate in the auction or fail to receive the win-
ner announcement. Our experiment results show that
with imperfect communication, a lower percentage of
agents are either assigned to (scheduled to execute)
or busy with (executing) tasks. It is further illustrated
that the drop in the number of agents that are assigned
or busy is larger in centralized systems than in dis-
tributed systems when communication failures are in-
troduced.
In the experiments, we placed the agents, tasks,
etc. on an N × N grid, where N ∈ R
+
. If we vary
N, but keep all else constant, smaller N will corre-
spond to better results. This is because communica-
tions success depends on distance. Our experiments
confirm that, given a fixed communication level, the
larger grid (larger N) results in a greater optimal point
of decentralization. For example, the optimal point
is 3 groups for Comms Level 2 when N = 100, but
7 groups when N = 200. This trend is clear for all
communication levels. The main conclusion is that
the message drop rate dictates the optimal decentral-
ization point. Similarly, our experiments also showed
that the number of agents will not affect the opti-
mal decentralization point, since it does not affect the
message success rate.
To simulate adversaries attempting to block com-
munications, we included jammers in the software.
jammers have a location on the grid, and they inter-
fere with communications in their vicinity.
We conjectured that the more jammers there are,
the higher the optimal point of decentralization would
be. The argument is that the more groups there are,
the more likely it is that there are some auctioneers -
as well as some of their agents - far away from jam-
mers. This will increase the number of successful
communications attempts. We again compute the av-
erage percentage of capabilities completed over thou-
sands of runs. The results confirm our hypothesis.
There is a marked change in the optimal points of de-
centralization, since the jammers affect the communi-
cations significantly. According to our initial analysis,
this should significantly shift the optimal point along
the group axis. However, we note that with smaller
groups, each group has fewer capabilities it can pro-
vide, lessening the effects of message drops on the
optimal point of decentralization. We see that on aver-
age, the optimal point of decentralization is about one
group more when there are five jammers than when
there are none.
Another interesting result we found when consid-
ering jammers is how well the algorithm performed in
the contested-communications environment. At the
optimal point of decentralization (4 groups), about
80% of communication attempts get through. At the
optimal point with jammers (5 groups), between 0.5%
and 1% of communication attempts are successful.
Despite this huge loss in communications, the agents
still manage to complete just over 30% of the capabil-
ities.
7 CONCLUSION
In this paper, we presented an empirical analysis of
the trade-offs between centralized and distributed re-
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
152

source allocation in communication contested envi-
ronments. The results show that there is an optimal
degree of decentralization that depends on the level
of communications disruption, which opens the pos-
sibility of actively managed distributed regimes. We
have extended the distributed auctioneer architecture
with asset proxy agents and have shown that this ex-
tension improves performance by 10 to 20%. To per-
form empirical analysis, we developed a distributed
auction architecture and winner determination algo-
rithm that optimizes a global objective function with
constraints. The set of these constraints enables us
to apply the algorithm to many problems where typ-
ical combinatorial auction algorithms fail to capture
the details and nuances of the application. We derived
theoretical bounds and conducted experiments to both
validate the theoretical analysis and, using the theo-
retical analysis, to validate the algorithm. Our results
show close correspondence between experimental re-
sults from our algorithm and the theoretical bounds.
Our next step is to enhance asset sharing among dis-
tributed auctioneers, modeling probabilistic resource
allocation by incorporating knowledge, e.g., a profile
of asset capabilities and expected geolocations.
ACKNOWLEDGEMENTS
This research was supported by ONR contract
N00014-12-C-0162.
REFERENCES
Amador, S., Okamoto, S., and Zivan, R. (2014). Dynamic
multi-agent task allocation with spatial and tempo-
ral constraints. In Proceedings of the Twenty-Eighth
AAAI Conference on Artificial Intelligence.
Bednowitz, N., Batta, R., and Nagi, R. (2014). Dispatch-
ing and loitering policies for unmanned aerial vehicles
under dynamically arriving multiple priority targets.
Journal of Simulation, 8(1):9–24.
Bellifemine, F. L., Caire, G., and Greenwood, D. (2007).
Developing Multi-Agent Systems with JADE. Wiley.
Bonacquisto, P., Modica, G. D., Petralia, G., and Tomar-
chio, O. (2014). A strategy to optimize resource allo-
cation in auction-based cloud markets. In Proceeding
of 2014 IEEE International Conference on Services
Computing.
Choi, H., Brunet, L., How, J. P., and Member, S. (2009).
Consensus-based decentralized auctions for robust
task allocation. IEEE Transactions on Robotics.
Cicalo, S., Tralli, V., and Perez-Neira, A. (2011). Cen-
tralized vs distributed resource allocation in multi-cell
ofdma systems. In Proceeding of 2011 IEEE 73rd Ve-
hicular Technology Conference (VTC Spring).
Greene, K. and Hofmann, M. O. (2006). Coordinating busy
agents using a hybrid clustering-auction approach. In
Proceeding of AAAI 06, Workshop on Auction Mecha-
nisms for Robot Coordination, Boston, MA.
Hong, S. A. and Gordon, G. J. (2011). Decomposition-
based optimal market-based planning for multi-agent
systems with shared resources. In Proceeding of
the 13th International Conference on Artificial Intelli-
gence and Statistics (AISTSTS), Chia Laguna Resort,
Sardinia, Italy.
Kong, P. (2002). Performance of queue in impaired wireless
channel. Electronic letters, 38(22).
Lagoudakis, M. G., Berhault, M., Koenig, S., Keskinocak,
P., and Kleywegt, A. J. (2004). Simple auctions with
performance guarantees for multi-robot task alloca-
tion. In Proceedings of the IEEE/RSJ International
conference on Intelligent Robots and Systems (IROS).
Liu, L. and Shell, D. A. (2011). Assessing optimal as-
signment under uncertainty: An interval- based algo-
rithm. International Journal of Robotics Research,
30(7):936–953.
Mauadi, M., Li, W., and Murata, T. (2011). Combinato-
rial auction method for decentralized task assignment
of multiple-loading capacity agv based on intelligent
agent architecture. In Proceeding of the Second In-
ternational Conference on Innovations in Bio-inspired
Computing and Applications (IBICA), pages 207–211.
Roggendorf, M. and Beltran, F. (2006). Flow-based
resource allocation in a multiple-access wireless
market-setting using an auction. In Proceeding of the
26th IEEE International Conference on Distributed
Computing Systems Workshops (ICDCSW06).
Spall, J. C. (2012). Cyclic seesaw process for optimiza-
tion and identification. Journal of Optimization The-
ory and Applications, 154(1):187–208.
Tsitsiklis, J. and Xu, K. (2011). On the power of (even a
little) centralization in distributed processing. In Pro-
ceeding of SIGMETRICS’11.
Tung, A. K. H., Ng, R. T., Lakshmanan, L., and Han, J.
(2001). Constraint-based clustering in large databases.
In den Bussche, J. V. and Vianu, V., editors, Database
Theory ICDT 2001, pages 405–419. Springer Berlin
Heidelberg.
Wang, X. and Martinez, J. F. (2015). Xchange: A market-
based approach to scalable dynamic multi-resource
allocation in multicore architectures. In Proceeding
of 2015 IEEE 21st International Symposium on High
Performance Computer Architecture (HPCA).
Zhang, K., Collins, Jr., E. G., and Shi, D. (2012). Cen-
tralized and distributed task allocation in multi-robot
teams via a stochastic clustering auction. ACM Trans.
Auton. Adapt. Syst., 7(2):21:1–21:22.
Zheng, X. and Koenig, S. (2009). K-swaps: Cooperative
negotiation for solving task-allocation problems. In
Proceeding of the International Joint Conference on
Artificial Intelligence (IJCAI), pages 373–379.
Zheng, X. and Koenig, S. (2010). Sequential incremental
value auctions. In Proceeding of AAAI Conference on
Artificial Intelligence (AAAI).
The Price of Anarchy: Centralized versus Distributed Resource Allocation Trade-offs
153
