
Sensing Danger: Exploiting Sensors to Build Covert Channels
Thomas Ulz, Markus Feldbacher, Thomas Pieber and Christian Steger
Institute of Technical Informatics, Graz University of Technology, Graz, Austria
Keywords:
Sensor, Exploit, Security, Side-channel, Covert Channel.
Abstract:
Recent incidents have shown that sensor-equipped devices can be used by adversaries to perform malicious
activities, such as spying on end-users or for industrial espionage. In this paper, we present a novel attack
scenario that uses unsecured embedded sensors to build covert channels that can be used to bypass security
mechanisms and transfer information between isolated processes. We present covert channels that require
read- and write-access for sensor registers as well as a covert channel that transfers data by just triggering
sensor readings so that malicious behavior cannot be distinguished from normal sensor usage. For each pre-
sented covert channel we discuss the trade-off between data rate and the likelihood of being detected as well as
potential countermeasures. The fastest covert channel we implemented achieves a data rate of 4844 bit/s while
the stealthiest but slower covert channel cannot be distinguished from normal user behavior. To highlight the
significance of these security issues, we used popular platforms, such as Linux and Android, to evaluate the
presented covert channels. However, we do not make any assumption regarding the device’s platform, and
thus we believe that the presented exploits pose a significant security risk for any sensor-equipped device.
1 INTRODUCTION
Nowadays, sensors are embedded into nearly every
device to improve the device’s usefulness. Applica-
tions of such sensor-equipped devices are basically
unlimited and include, for example, environmental
monitoring (Srbinovska et al., 2015), healthcare
applications (Nguyen et al., 2016), or industrial
applications (Chi et al., 2014). Also, modern smart-
phones contain multiple embedded sensors that are
used to improve user experience (Yu et al., 2015).
Regardless of the application domain, embedded sen-
sors are seen as an enabling technology for improved
functionality such as context awareness (Perera et al.,
2014). However, including embedded sensors into
everyday objects also entails several security risks.
The most addressed security issue regarding sensors
is the privacy aspect of sensor data (Suo et al., 2012).
Since sensors observe the environment, they sense
private information, such as health care data (Yi et al.,
2016) or industrial processes (Sadeghi et al., 2015).
A loss of such private sensor data can lead to severe
consequences that can even result in severe financial
losses for a business if intellectual property or
customer data is lost in a security breach. Therefore,
the privacy of sensor data usually is considered to
be of high importance. The second security issue
related to sensors is the trustworthiness of sensor
data (Suo et al., 2012). In so-called deception
attacks (Kwon et al., 2013), an adversary influences
a system’s behavior by manipulating sensor data.
If the manipulated sensor data is used to control a
system or a process, the system could be physically
damaged or even threaten human lives due to its
malicious behavior (Derler et al., 2012). Therefore,
the trustworthiness of sensor data also is considered
to be of high importance. Finally, insufficient and
too coarse permissions for accessing sensors also
present security issues in sensors that need to be
addressed (Shrivastava et al., 2017). However,
such issues most often are associated with privacy
concerns. In this paper, we are going to exploit in-
sufficiently secured sensor interfaces to transfer data
between two processes that are otherwise prevented
from exchanging data. A so-called covert channel
poses an immense security risk for systems since
the security implications range from leaking private
information to compromising a system so that its
intended behavior is either manipulated or disabled.
We present three different covert channels that
provide a trade-off in covert channel data rate and the
likelihood of such a covert channel being detected by
a user or some software mechanism such as auditing
sensor usage (Mirzamohammadi et al., 2017). The
data is transferred by exploiting unprotected sensor
registers in all three presented approaches. We do
100
Ulz, T., Feldbacher, M., Pieber, T. and Steger, C.
Sensing Danger: Exploiting Sensors to Build Covert Channels.
DOI: 10.5220/0007353801000113
In Proceedings of the 5th International Conference on Information Systems Security and Privacy (ICISSP 2019), pages 100-113
ISBN: 978-989-758-359-9
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

not claim that the list of covert channels presented
in this paper is exhaustive. Instead, with this paper
we want to bring attention to such security issues and
highlight the importance of mitigating them.
Contributions. In brief, we make the following con-
tributions in this paper. To the best of our knowledge,
we are the first to present these concepts. We present
three sensor-based covert channels that are enabled
by unprotected registers in embedded sensors. These
covert channels differ in the achievable data rate
and the channel’s likelihood of being detected. In
addition, we present countermeasures to mitigate
the presented covert channels. We also demonstrate
a sensor-based covert channel that is based on
exploiting a security weakness in Android’s sensor
management system. To facilitate the evaluation
of sensors regarding exploitable vulnerabilities, we
developed an easy-to-use modular and extendible
framework. We provide this framework on GitHub
1
.
Outline. The remainder of this paper is structured as
follows. In Section 2, we are going to briefly intro-
duce side-channels and covert channels, and catego-
rize these attacks. We list other state-of-the-art covert
channels in Section 3 and discuss their performance.
After that, we define the underlying system-model we
assume and discuss possible resulting threats in Sec-
tion 4. In Section 5, we demonstrate our register-
based covert channels and discuss potential counter-
measures. Section 6 discusses covert channels based
on exploiting Android’s sensor manager. The frame-
work we developed for evaluating sensor-based covert
channels is then presented in Section 7. In Section 8,
we evaluate the presented covert channels as well as
our framework’s functionality. This paper is then con-
cluded with Section 9.
2 COVERT CHANNELS
The term covert channel was coined by Lamp-
son (Lampson, 1973) in 1973 when he defined a
covert channel as a communication channel that is
not intended for information transfer at all. Usually,
covert channels facilitate information transfer be-
tween processes that are otherwise prohibited from
communicating with each other by the system. In
order to build a covert channel, the data that needs
to be transferred is embedded in events that are
observable by other processes such as a processes’s
system load (Lampson, 1973). Such observable
1
https://github.com/Grundplatte/SensIO
triggers observes
Sender
Side-
Channel
Receiver
Figure 1: Basic concept of a covert channel.
events are denoted as so-called side-channels.
Side-Channels: can be exploited for either active or
passive side-channel attacks. In active side-channel
attacks, an attacker actively tampers with the device,
thus requiring physical access (Genkin et al., 2016).
In passive side-channel attacks, the effects that are
caused by one process are observed by another
process. This can be used to reveal confidential in-
formation such as cryptographic keys by monitoring
processes for unintentionally leaking side-channel
information, such as timing, power consumption, or
electromagnetic emanation (Kim and Quisquater,
2007; Longo et al., 2015; Luo et al., 2015). If a
process intentionally triggers such observable effects,
data can be transferred by the process and received by
another process, thus establishing a so-called covert
channel.
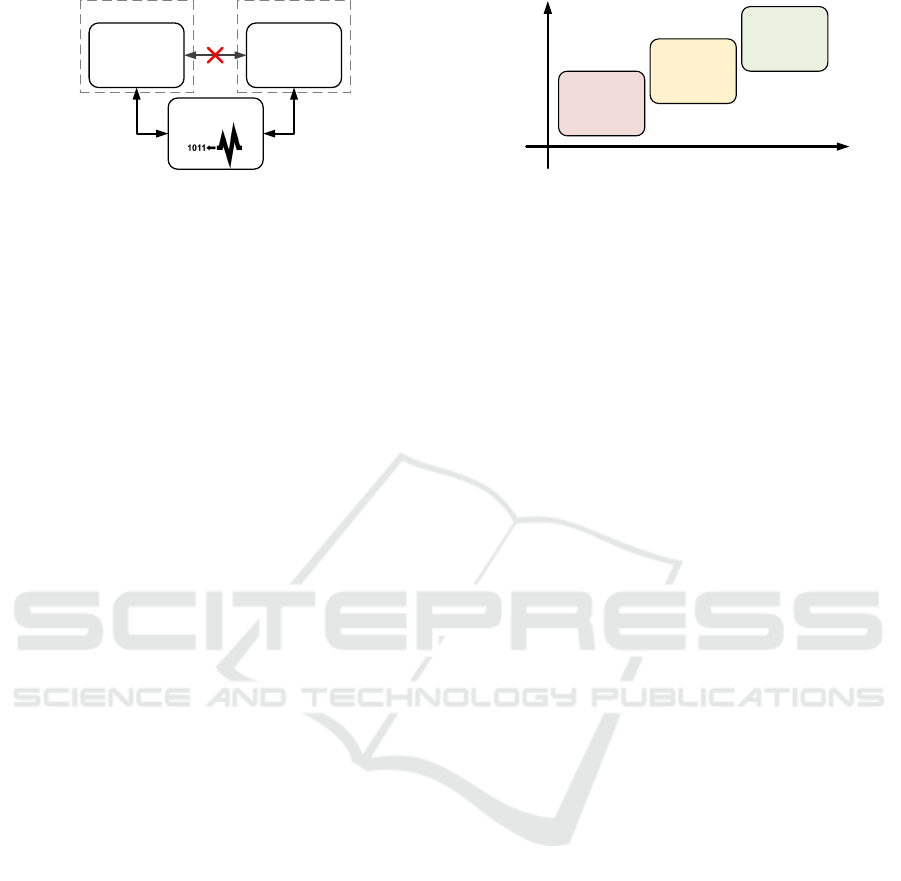
Covert Channels: in general comprise three entities,
a sender - receiver pair, and the side-channel that is
used to build the respective covert channel. Figure 1
illustrates a basic covert channel and the data flow be-
tween these entities. (i) The sender is in possession
of data that it wants to transfer to the receiver. How-
ever, the system prevents the sender from using con-
ventional methods, such as shared memory or sock-
ets, to transfer its data. Therefore, the sender utilizes
side-channel information that can be manipulated by
the sender. The (ii) side-channel is used by the sender
and receiver as a stealthy transport medium for their
data transfer. (iii) The receiver needs to be capable
of observing the side-channel’s state changes. In ad-
dition, it must be synchronized with the sender so that
the start and end of the transferred data stream can be
correctly identified. In an ideal scenario, the receiver
is also able to distinguish between state changes of
the side-channel that are either caused by the sender
or by normal system operation.
Depending on a side-channel’s nature, different
data rates can be achieved. The achievable speed de-
pends on two factors. The first determining factor is
the component’s speed, i.e. sensor-based covert chan-
nels (Carrara and Adams, 2016) will be slower than
covert channels based on components that are opti-
mized for performance such as memory. The second
determining factor is the word size that can be trans-
ferred. A covert channel that is capable of transmit-
ting a multi-bit word per time unit will be faster than a
covert channel that only can transfer a 1-bit word per
Sensing Danger: Exploiting Sensors to Build Covert Channels
101

Covert Channel Data Rate
Sensor-
Based
Network-
Based
Memory-
Based
Cache-
Based
Same Physical DeviceInter-Device Possible
Figure 2: Classification of different covert channel types
according to the covert channel data rate.
time unit. A basic overview that compares the achiev-
able covert channel data rates for the most common
side-channels is shown in Figure 2. We also classified
the covert channels based on their scope. The faster
covert channels (memory- and cache-based) require
the sender and receiver to reside on the same physical
device so that both processes share the same memory
or cache. In contrast to that, sensor- and network-
based covert channels can transfer data between pro-
cesses that are running either on the same physical de-
vice or on different devices as long as they can access
the same shared medium.
3 RELATED WORK
In this section, we list related work for exploiting dif-
ferent system components.
3.1 Cache-based Covert Channels
Modern processor- and system-architectures entail
leaking side-channel information due to these sys-
tems being optimized for performance or energy ef-
ficiency (Wang and Lee, 2006). One of these side-
channels that leak information is cache memory.
Cache-based side-channels do not rely on weaknesses
in the operating system (OS) or a virtual machine
monitor, and thus, these attacks are considered to be
highly practical (Liu et al., 2015). The side-channel
that is exploited for cache-based covert channels is
the timing difference between a cache hit and a cache
miss. If a process is capable of intentionally caus-
ing cache hits or misses, data can be encoded in these
events. A cache miss can be provoked by flushing all
data from cache regions (Osvik et al., 2006; Yarom
and Falkner, 2014; Gruss et al., 2016). A very fast
and reliable cache-based covert channel that is capa-
ble of bit rates over 45 KByte/s with a bit error rate of
0% was presented in literature (Maurice et al., 2017).
3.2 Memory-based Covert Channels
Since the memory in modern processors and systems
is shared between cores, memory-based side-channels
are used to reveal confidential information and to
build covert channels (Zhang et al., 2012). One com-
monly used method for inter-process communication,
shared memory, is usually prohibited by process iso-
lation, such as sandboxes or virtual machines. How-
ever, side-channel information can be used to bypass
these protection mechanisms, for example by exploit-
ing memory deduplication (Xiao et al., 2013). Other
side-channels exploit timing differences while lock-
ing the memory bus (Wu et al., 2011). A DRAM-
based side-channel was presented (Pessl et al., 2016)
for which the authors claimed raw bit rates of up to
2 Mbit/s while the bit error probability stayed below
1%. However, the authors did not state a bandwidth
for 0% bit errors.
3.3 Network-based Covert Channels
Exploiting network protocols to build network-based
covert channels is one of the earliest known meth-
ods for stealthy data transfer. Network-based covert
channels are used to bypass network protection mech-
anisms such as firewalls or virtual local area networks
(VLANs) that otherwise are used to monitor or pre-
vent unwanted data transfer (Zander et al., 2007a). To
hide transferred data in network packets, various pro-
tocols at different network layers are exploited. On
the network layer, information can be hidden in proto-
col headers such as in the 802.11 protocol’s sequence
control field (Frikha et al., 2008), or in the Received
Signal Strength Indicator (RSSI) (Tuptuk and Hailes,
2015). On the Internet and Transport layer, many ap-
proaches use Transmission Control Protocol/Internet
Protocol (TCP/IP) header fields to hide data in net-
work packets (Ahsan and Kundur, 2002; Giffin et al.,
2002; Zander et al., 2007b). On the application layer,
various protocol fields can be used to hide informa-
tion (Ameri and Johnson, 2017). Also, covert chan-
nels that work independently of any network protocol
were presented (Cabuk et al., 2004; Ji et al., 2009).
3.4 Sensor-based Covert Channels
Malicious use of sensors and their data traditionally
involves spying on events or humans to reveal confi-
dential information (Perrig et al., 2004). If an event
(e.g. entering a password) triggers physical effects
such as vibration that can be measured by a nearby
sensor, sensor-based side-channels can be used for
malicious activities (Aviv et al., 2012). Also other
sensors such as ambient light sensors can be used to
steal confidential information on a smartphone (Spre-
itzer, 2014). In the same manner, sensor-based covert
channels can be built by triggering physical effects
ICISSP 2019 - 5th International Conference on Information Systems Security and Privacy
102
Sensor
Isolation
Process A
(e.g. sender)
Isolation
Process B
(e.g. receiver)
Figure 3: Underlying covert channel system-model.
from one process and by measuring these effects
from another process. For instance, covert chan-
nels based on the temperature of devices were pre-
sented (Brouchier et al., 2009; Guri et al., 2015). In
contrast to approaches that require the modification of
physically observable values, covert channels might
also tamper with measured sensor values for stealthy
data transfer (Tuptuk and Hailes, 2015).
4 SYSTEM- & THREAT-MODEL
In this section, we present the system model that is
used to exploit embedded sensors and discuss the
threat-model and potential impact of covert channels.
4.1 System-model
To exploit security weaknesses in sensors for build-
ing sensor-based covert channels, we consider the
system-model shown in Figure 3. This model is com-
prised of at least two potentially isolated processes
and a shared sensor. The isolation between processes
(e.g. sandboxes) prevents any direct data exchange
between these processes. However, in our system-
model both processes can access the same shared sen-
sor. We do not make any assumption regarding the
type of sensor that is present in this system.
4.2 Threat-model
In our threat-model, we identify two scenarios that are
enabled by transferring data over a covert channel. An
isolated process might be able to send private data or
receive instructions via this covert channel.
1. We assume that an isolated process A holds confi-
dential information that an attacker wants to com-
municate to another process B. For instance, pro-
cess A might monitor a video stream to detected
movements in a security system. However, pro-
cess A is prohibited from sharing the video stream.
If process A is capable of transferring information
stealthily to process B using a covert channel, data
privacy is broken.
Covert Channel Data Rate
Detectability
Triggering
Sensor
Configuration
Bits
Unused
Registers
Figure 4: Trade-off between data rate and detectability of
our presented covert channels.
2. As second scenario, we assume that process A is
capable of controlling some physical process such
as a robot’s actuators. To prevent malicious con-
trol actions, process A is isolated from the net-
work. Instead, control actions are solely triggered
by sensor data. However, an attacker might be
able to send control commands to process A via
process B and a covert channel.
To successfully establish a sensor-based covert
channel between two processes, an attacker needs to
be capable of executing modified code in both in-
volved processes. We assume that an attacker is ca-
pable of running the required malicious code through
any state-of-the-art attack such as code injection (Poe-
plau et al., 2014).
5 SENSOR REGISTER EXPLOITS
In this section, we present three exploits of embed-
ded sensors that we use to build sensor-based covert
channels. All three exploits are based on direct ac-
cess to the sensor. That is, access to the sensor is not
limited by any mechanism such as managed sensor
access (Milette and Stroud, 2012). In all three ap-
proaches, sensor registers are used to transfer infor-
mation between processes. The approaches differ in
the achievable covert channel data rate and the like-
lihood of detecting such a covert channel (detectabil-
ity). Also, the required effort for mitigating the differ-
ent covert channels differs. A comparison of all three
approaches regarding these three attributes is shown
in Figure 4, where green indicates a covert channel
easy to mitigate and red indicates a covert channel that
is hard to mitigate.
5.1 Unused Registers
Embedded sensors usually contain unused registers
that are either reserved or not required by the sensor’s
current mode of operation. Similar to network-based
covert channels, these registers can be exploited for
Sensing Danger: Exploiting Sensors to Build Covert Channels
103

transferring data.
Reserved Registers: are registers that are neither
used by the sensor to publish information (e.g.
status flags), nor to store data such as configuration
parameters for the sensor. Sensors, such as the
HTS221 (STMicroelectronics, 2016) humidity and
temperature sensor or the LSM9DS1 (STMicroelec-
tronics, 2015) magnetometer, accelerometer, and
gyroscope, contain many such reserved registers.
The reserved registers are listed in the respective
data-sheets. Although the data-sheets often state that
these registers must not be changed, they are often
still read- and writeable.
Unused Registers: are registers that might be used
in some sensor operation modes, but are unused
in other modes. For instance, many sensors such
as the LSM9DS1 sensor allow to set thresholds (e.g.
INT THS * registers) that are used to activate flags that
indicate if the threshold is exceeded. However, if the
threshold monitoring is disabled (in the ACT THS reg-
ister), the threshold registers are unused, and thus can
be used for data transfer in a covert channel. Since the
register that indicates which thresholds are monitored
is readable, a malicious process easily can determine
which threshold registers are unused.
5.1.1 Covert Channel Design
Unused registers facilitate a very simple covert chan-
nel design. Information can be written into a register
by one process, while the other process reads the reg-
ister and subsequently confirms reception of data by
modifying the same register. In our design, we use the
register’s MSB as a flag to signal successful reception
by the receiver. Therefore, not all bits of a register
can be used for data transfer. Such a covert channel
that is hiding information in registers is comparable
to network-based covert channels that use reserved
protocol fields or bits (Rezaei et al., 2013) for hiding
transferred data. Depending on the sensor’s register
size, the amount of data that can be transferred in one
transmission varies. Both HTS221 and LSM9DS1 con-
tain 8 bit registers which allows 7 bits of data to be
sent in each transmission.
5.1.2 Detectability
Reserved registers can be read and written to; how-
ever, writing values to these registers might have an
impact on a sensor’s correct functionality. Depend-
ing on the resulting impact of writing arbitrary values
to such a register, covert channels that are based on
writing and reading these registers could easily be de-
tected. In comparison to that, a covert channel that
is based on not required registers is harder to detect.
As long as the register’s value has no impact on the
sensor’s functionality, the covert channel does not in-
fluence the sensor’s behavior.
5.1.3 Countermeasures
To mitigate a covert channel based on unused reg-
isters, various countermeasures can be used. (i) If
write access to reserved registers is disabled, these
registers cannot be exploited to build covert channels.
(ii) Write access to unused registers must be disabled
whenever a register is not required in the sensor’s cur-
rent mode of operation. Whenever the register content
is required, write access for the respective register can
be granted again by the sensor. (iii) Write-only con-
figuration registers could mitigate such covert chan-
nels since the receiver would not be capable of read-
ing transmitted data anymore. However, write-only
registers also complicate updating the register’s value,
if the current value would be required first. For exam-
ple, updating only a certain part of the register such as
a threshold’s exponent without modifying the remain-
ing bits, requires bit-wise operations, such as AND, OR,
and XOR, for registers.
5.2 Configuration Bits
Embedded sensors are configured using so-called
configuration registers. In these registers, various
different settings are often combined for efficiency
reasons. Similarly to exploiting whole registers
that are unused, certain bits of these configuration
registers can often also be exploited.
Reserved Bits: of configuration registers can be used
to transfer data in a covert channel. For example,
bits [7:6] in the HTS221 sensor’s AV CONF register are
reserved bits that do not influence any configuration
state. However, similar to unused registers, the
data-sheet states that these bits must not be changed
to not cause unwanted sensor behavior.
LSBs of Configured Values: such as thresholds can
be used to hide transferred data in a covered channel.
This approach is similar to hiding data in the LSBs
of header fields in network-based covert-channels. If
chosen correctly, manipulating the LSBs of, e.g., a
threshold value only has a negligible impact on the
sensor’s expected functionality.
Unused Configuration Bits: can be present in con-
figuration registers if the number of available options
ICISSP 2019 - 5th International Conference on Information Systems Security and Privacy
104

Table 1: OPT3001 ambient light sensor modes of operation.
Mode Mode[1] Mode[0]
shutdown 0 0
single-shot 0 1
continuous 1 0
continuous 1 1
is smaller than the maximum number that can be rep-
resented by the respective part of the configuration
register. For instance, in the OPT3001 (Instruments,
2014) ambient light sensor’s configuration register,
2 bits are reserved for a configuration parameter that
has three available options. As shown in Table 1, if
the MSB (Mode[1]) is set to ’1’, the LSB (Mode[0])
can be used to transfer data in a covert channel.
5.2.1 Covert Channel Design
A covert channel that is based on exploiting config-
uration bits can be based on the same principles as a
covert channel that exploits unused registers. In a first
step, the targeted configuration bits need to be deter-
mined. After that, these bits are used to transfer data
in a covert channel by encoding data in these avail-
able bits. The recipient of data reads the respective
bits and confirms if data is successfully read. Simi-
larly to exploiting unused registers, one bit is required
that is used as status flag for confirming that the re-
ceiver successfully read the transferred data. There-
fore, such a covert channel requires at least two avail-
able bits. If only one bit is available, both sender
and receiver must be synchronized by other measures
such as a clock which slows down the covert chan-
nel. Compared to a covert channel that is able to ex-
ploit a whole unused register, a covert channel that is
only able to utilize some bits of a register will provide
lower covert channel data rates.
5.2.2 Detectability
Depending on the configuration bits that are exploited
to build the covert channel, the detectability also
varies. If reserved bits are used, correct sensor func-
tionality might be influenced, and this may lead to
easy detection of the covert channel. If bits that only
have a minimal or no impact on the sensor’s function-
ality are manipulated, the covert channel is harder to
detect. However, toggling configuration parameters
might cause sensors to restart their current measure-
ment. Therefore, data transfer must be timed in order
to minimize such detectable effects.
5.2.3 Countermeasures
To mitigate covert channels that are based on ex-
ploiting configuration bits, the following countermea-
sures can be implemented on a sensor. (i) Disabling
write access to reserved bits mitigates misuse of these
bits by covert channels. (ii) Write-only configura-
tion registers mitigate covert channels that are based
on exploiting configuration bits since the recipient of
data is unable to read the register. However, simi-
lar to countermeasures for unused registers (Subsec-
tion 5.1.3), bit-wise operations, such as AND, OR, and
XOR, will be required for registers.
5.3 Triggering Sensors
Both register exploit methods (unused registers and
configuration bits) require read- and write-access
to the same register. However, as briefly discussed
in the respective countermeasure subsections, coun-
termeasures to mitigate these exploits can easily be
implemented in software or hardware. Nevertheless,
exploiting embedded sensors via registers is still
possible even if these countermeasures are imple-
mented on a sensor. If there are read-only registers
at a sensor that can be updated by certain events, and
these events can be triggered by one process, a covert
channel according to the definition shown in Figure 1
can still be built. For example, on most sensors
status flags in registers are used to indicate a finished
sensing process. If the sensor is not operated in a
continuous sensing mode but in a single-shot mode,
one process is capable of updating these status flags
by triggering sensor readings. The status flags can
then be used to encode information in various ways.
For example, information can be encoded in timing
differences, or, if multiple status bits exist, directly in
these status bits.
Timing Differences: between sensor readings can
be used to encode information. For example, a binary
’1’ could be transferred by requesting sensor readings
with a time interval between readings of 100 ms
(10 Hz). A binary ’0’ would then be transferred
by using a different timing interval, for example,
50 ms (20 Hz). The receiver then needs to observe
the status bit to get timing intervals and to infer
the corresponding data. However, the drawback of
such an approach is that sender and receiver need
to be synchronized to guarantee precise timings. In
addition, the receiver would need to poll status bits
with a high frequency.
Sensing Danger: Exploiting Sensors to Build Covert Channels
105

Table 2: Status flags for two sensors and the available states
for a 2-bit word and a 1-bit word respectively.
S1 S2 2-bit word 1-bit word
0 0 ’00’ and no data no data
0 1 ’01’ ’0’
1 0 ’10’ ’1’
1 1 ’11’ and sensor ready sensor ready
Directly Encoding Information in Status Bits: is
possible if there is more than one status bit that can
be triggered by the sender. For example, sensors that
are capable of sensing more than one physical prop-
erty also contain multiple status flags to indicate a fin-
ished sensing process for each property. For example,
the HTS221 (STMicroelectronics, 2016) temperature
and humidity sensor includes status registers for both
physical properties. Using both registers, a 2-bit word
can be encoded by triggering either no, one of both,
or both sensors simultaneously. However, similarly
to measuring timing differences, this approach would
require precise synchronization between sender and
receiver to distinguish a transferred ’00’ from the sta-
tus flags default value that often is also set to ’00’.
To discard this requirement, data can be encoded by
triggering one sensor to transmit a binary ’1’, and by
triggering the other sensor to transmit a binary ’0’.
Both mentioned approaches are compared in Table 2.
5.3.1 Covert Channel Design
Since covert channels based on encoding information
in status bits do not require synchronization between
processes, we consider this type of covert channel
more practical. Therefore, we are going to discuss
a covert channel based on transmitting a 1-bit word
using the status flags of two distinct sensors. In its
default setting, the sensor’s status flag is set to ’0’ and
indicates that no sensor reading is ready at the mo-
ment. If a sensor reading is available, the respective
status flag is set to ’1’. If the sensor’s measured value
is read, the status flag is reset to ’0’ again. In our
covert channel, the sender triggers both sensors. Af-
ter the sensing process is completed, the sender reads
one of the two sensor measurements to reset the re-
spective status flag. Information is encoded as a 1-bit
word according to Table 2. The receiver can observe
the same status flags, and thus receive the transmitted
information. The reception of data is confirmed by
the receiver by resetting both status flags. Using the
encoding shown in Table 2 in an example, the binary
sequence ’11010’ would be encoded by resetting the
status flags from the sensors S1, S1, S2, S1, S2 re-
spectively. Since the sensing process requires a cer-
tain amount of time, this covert channel’s data rate is
lower compared to covert channels that directly write
information into a sensor’s registers.
5.3.2 Detectability
Compared to directly writing into a sensor’s registers,
a covert channel that is based on triggering sensors is
harder to detect. Since only the sender triggers sen-
sor readings, while the receiver is only observing sta-
tus flags, no malicious activity might be noticed when
monitoring sensor activities (Mirzamohammadi et al.,
2017). The behavior that can be observed in such
a case are two processes where one process is using
sensors frequently, while the other process is check-
ing the availability of these sensors. If the roles of
sender and receiver are switched (Section 7.2), the
covert channel’s behavior is comparable to two pro-
cesses that alternately access the same sensors.
5.3.3 Countermeasures
To mitigate covert channels that are based on trigger-
ing sensors, more complex countermeasures are re-
quired in comparison to covert channels that exploit
read- and write-able registers. In principle, any link
between the event that can be triggered by a process
and observable information needs to be removed. To
mitigate all three discussed covert channels, a sensor
management instance that encapsulates sensor access
is required. As an example, the Android Sensor Man-
ager (Milette and Stroud, 2012) only allows processes
to register for sensor data they are interested in. The
manager then determines the superset of all requested
sensor configurations. Whenever a new sensor read-
ing is available, all registered processes are notified
via an interrupt. Therefore, such a managed approach
would remove any status flag that indicates available
sensor readings or exceeded thresholds, and thus mit-
igates covert channels based on such information.
6 MANAGED SENSOR EXPLOITS
Contrary to the previous sensor-based covert chan-
nel designs, Android uses a managed sensor ap-
proach (Milette and Stroud, 2012) where processes
need to subscribe to a sensor manager to get sen-
sor readings based on events. Thus, access to sensor
registers as well as manually triggering sensor read-
ings is not possible in Android. However, in this sec-
tion we demonstrate two different approaches how we
exploit the Android sensor manager to build sensor-
based covert channels based on triggering sensors.
When registering a listener for any sensor that is
supported by the respective hardware platform us-
ICISSP 2019 - 5th International Conference on Information Systems Security and Privacy
106
ing Android’s built in sensor manager, the method
SensorManager.registerListener() is used that
takes the type of sensor as well as a sampling period
as parameters. As stated in Android’s API documen-
tation, this sampling period is only a suggested de-
lay that might be altered by other applications. Typi-
cally, the sampling period can be set based on values
predefined in Android (normal, UI, game, fastest) or
specified arbitrarily. Thus, if one process registers a
listener with a given sampling period which is then
influenced by another process, data can be transferred
between these processes using this covert channel.
6.1 Covert Channel Design
Based on the observation that a process may influence
the sampling period of other processes, we present
two methods for covert channels in Android.
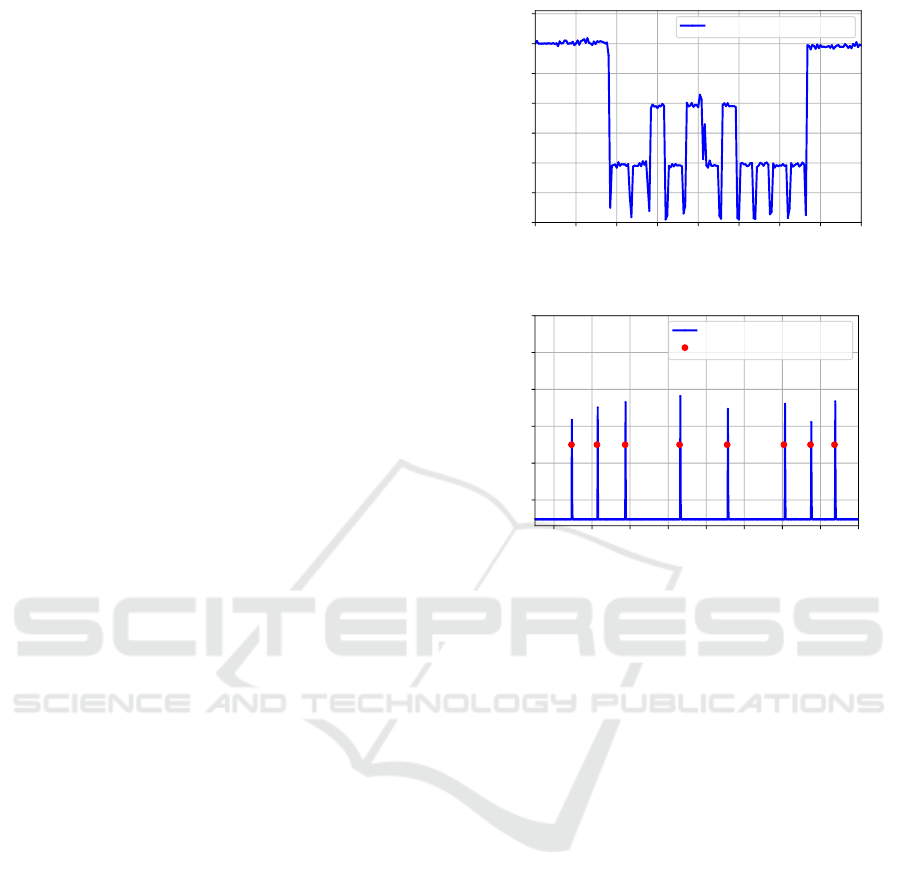
Frequency Encoded. Android’s sensor manager
provides sensor measurements to all registered
processes with the lowest sampling period specified
by all registered processes. If the receiver registers a
listener with a sampling period that is even lower than
the current lowest sampling frequency, it signals to
the sender that it now is ready to receive data. That is,
by specifying the sensors’s lowest sampling period,
all processes now receive sensor measurements with
the sampling period specified by the receiver. The
sender now can encode information by registering
with either the same sampling period as the receiver
or with an ever lower sampling period, as shown in
Figure 5. Thus, information is encoded by different
sampling periods or sensing frequencies.
Outlier Intervals. Whenever a new listener is reg-
istered using Android’s sensor manager, one sensor
measurement is provided with a time interval to the
previous measurement that can clearly be detected as
outlier. Depending on the hardware, we observed ei-
ther outliers of too low (Figure 5) or too high (Fig-
ure 6) sampling periods. That is, even if a process
already is registered for a sensor using the lowest pos-
sible sampling period supported by the hardware, in-
formation can still be transferred by registering new
listeners to provoke such outliers. As shown in Fig-
ure 6, the interval between outliers can then be used
to encode information that is transferred over the re-
spective covert channel.
6.2 Detectability
Covert channels based on registering sensor listen-
ers cannot easily be detected since the switching of
600 625 650 675 700 725 750 775 800
Sensor Measurement [#]
0
10
20
30
40
50
60
70
∆
Sensor
[ms]
0 0 1 0 1 0 1 0 0 0 0
Sensor Reading Frequency
Figure 5: Different sensing intervals in Android.
1300 1400 1500 1600 1700 1800 1900 2000 2100
Sensor Measurement [#]
10
20
30
40
50
60
∆
Sensor
[ms]
0 0 1 1 1 0 0
Sensor Reading Frequency
Register for Sensor Updates
Figure 6: Registering sensor listeners in Android.
sampling periods due to other processes registering
and un-registering listeners is expected behavior. A
process that is minimized is expected to un-register
its listener, while re-registering them if the process
is activated again. However, if sensor access is au-
dited (Han et al., 2017), malicious access patterns
could be detected if the auditing tool is trained accord-
ingly. In contrast, popular code analysis tools such as
FlowDroid (Arzt et al., 2014) are currently not capa-
ble of detecting our presented covert channels. How-
ever, also these tools can be appropriately trained such
that the presented covert channels can be found.
6.3 Countermeasures
To mitigate the presented covert channels, changes to
Android’s sensor manager need to be implemented. If
arbitrary sampling periods are banned and only pre-
defined sampling periods are used, the sampling peri-
ods need to be defined such that they are multiples of
each other. For example, if the predefined sampling
period fastest is defined as 10 ms, game could be de-
fined as 20 ms, UI as 80 ms, and normal as 160 ms.
By doing so, the sensor internally can provide sen-
sor measurements with the system’s lowest specified
sampling period, while each process receives sensor
measurements with its specified sampling period only.
Sensing Danger: Exploiting Sensors to Build Covert Channels
107

Hadamard encoded SQN
4 bit
(a) REQ packet.
Type
1 bit
Data / Command
var. length
SQN
2 bit
EDC
var. length
(b) RES packet.
Figure 7: Packet structures of REQ and RES packets.
7 TEST FRAMEWORK
To facilitate easier vulnerability testing of embedded
sensors, we present a modular covert channel frame-
work that is structured into the following four ab-
straction layers. Hardware specific aspects are imple-
mented in a hardware abstraction layer that is com-
prised of the following three sub-layers: (i) The low-
est layer (access abstraction) implements access to
embedded sensors through various technologies, such
as I2C or SPI. (ii) The sensor abstraction layer imple-
ments sensor specific aspects such as register map-
pings. (iii) All sensor-based exploits that are pre-
sented in Section 5 are implemented in the exploit
abstraction layer. (iv) Protocol specific functionality
(Subsections 7.1 – 7.3) is implemented in the covert
channel abstraction layer.
7.1 Error Detection and Correction
As other processes might also access sensors, a covert
channel needs to be considered a noisy channel. How-
ever, an error-free data transmission through a noisy
channel can be achieved if the data is sufficiently
encoded by appropriate coding schemes (Shannon,
1948). In our covert channel framework, we use Error
Correcting Codes (ECCs) as well as Error Detecting
Codes (EDCs) to reliably transfer our messages, as
will be discussed in Section 7.2.
7.2 Packet Structure and Flow
The packet structures of request (REQ) and response
(RES) packets in our approach are shown in Figure 7.
REQ Packet. The only information contained in a
REQ packet is the Sequence Number (SQN) encoded
by a Hadamard ECC. In general, a Hadamard ECC
encodes a k bit message in a 2
k
bit codeword. Due
to the exponential relationship between payload size
and codeword size, we use a 2 bit SQN, resulting in
a total size of 4 bits. The Hadamard ECC is proven
optimal for k ≤ 7 (Bouyukliev and Jaffe, 2001). In
case of transmission errors, the ECC ensures that
information can be recovered and errors are detected
Table 3: Supported commands.
Code Description
0 Increment packet data size (Section 7.3)
1 Decrement packet data size (Section 7.3)
2 Stop data transmission
3 Reverse data direction
Table 4: Valid size options.
Data [bits] EDC [bits] Packet [bits]
5 3 11
13 4 20
29 5 37
61 6 70
as long as less than half of the bits are flipped.
RES Packet. All RES packets start with a type field
that specifies whether the message contains data or
a command. Commands that are supported by our
covert channel framework are shown in Table 3. Iden-
tical to REQ packets, RES packets also contain a 2 bit
SQN. Due to their length, we do not use ECCs for
RES packets. Instead, a Berger EDC (Berger, 1961)
is used to detect transmission errors that need to be
handled by the communication principle implemented
in our framework. A k bit Berger code is capable of
checking a maximum of n = 2
k
− 1 bits information.
Thus, the resulting data/command and EDC lengths
can be derived from the packet’s total size (Table 4).
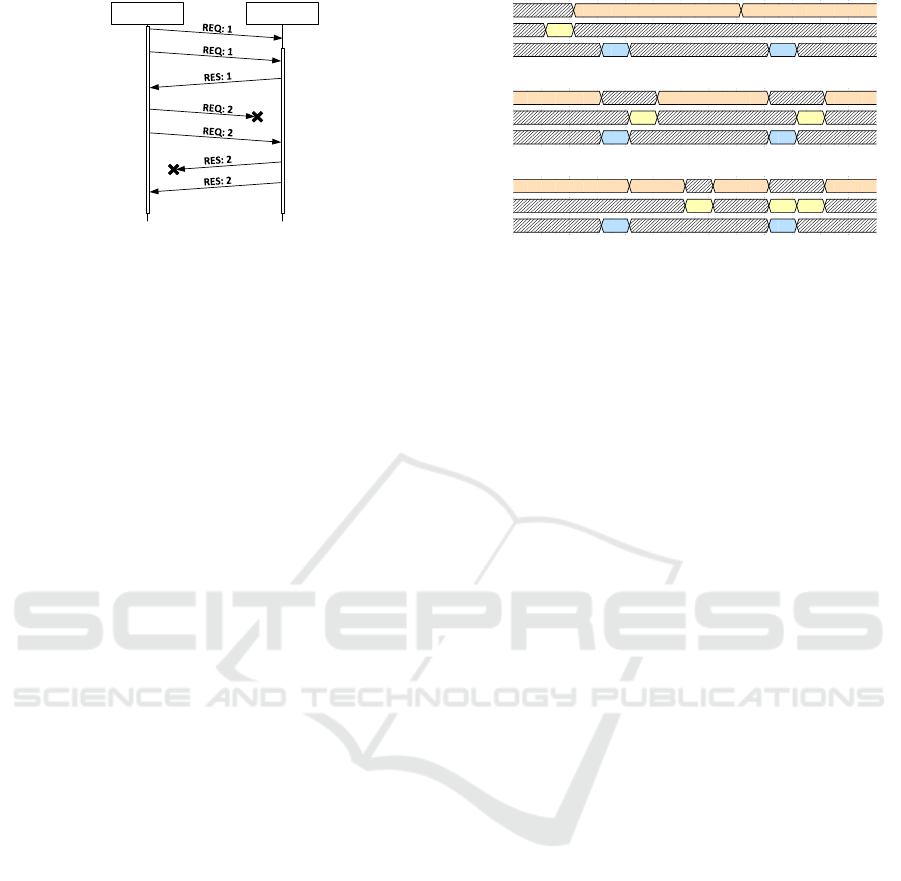
To manage communication flow in our presented
covert channels, we employ a request/response mech-
anism. A successful request/response cycle is com-
prised of the reception of a REQ packet by the sender
and the reception of the RES packet by the receiver.
Similar to HTTP, the actual data that is transferred is
contained in the RES packet. Both, REQ and RES
packets contain a SQN that is used to manage commu-
nication flow. Matching REQ and RES packets can
be identified by their matching SQN. The receiver in-
creases the SQN after successfully receiving the cor-
responding RES packet, as shown in Figure 8. By re-
peatedly sending the same SQN, receiver and sender
can indicate that the expected packet was not success-
fully received. Retransmissions are caused in three
scenarios:
1. When establishing the covert channel, the sender
might not be ready to send the requested data and
no matching RES packet is sent to the receiver’s
initial REQ packet. The receiver continuously
transmits this initial packet until a covert channel
is established, thereby synchronizing the states of
receiver and sender.
2. A REQ packet can be lost due to a noisy data
ICISSP 2019 - 5th International Conference on Information Systems Security and Privacy
108
Receiver Sender
Sender
not ready
Request
lost
Response
lost
Figure 8: Data flow and handling of lost packets.
channel. The receiver repeatedly sends its REQ
packet until a matching RES packet is received.
3. A RES packet can also be lost due to a noisy data
channel. The sender repeatedly sends its RES
packet until a REQ packet with an incremented
SQN is received.
The commands supported by our covert channel
framework (Table 3) also include two commands re-
lated to data flow. (i) To indicate the end of an on-
going data transfer, the sender sends a stop command
to the receiver. (ii) The roles of sender and receiver
can be reversed by sending the respective command.
Thus, our covert channel also supports bidirectional
communication.
7.3 Adaptive Packet Length
Information is transferred by interacting with a sensor
in all presented sensor-based covert channels. Thus,
other processes that also interact with the same sen-
sor might introduce bit errors into our covert chan-
nel. These bit errors can be detected by our approach
due to RES packets containing an EDC. However, as
shown in Figure 9(a), this leads to frequent retrans-
missions of large chunks of information.
As already briefly discussed in Section 7.2, our
covert channel supports dynamic packet sizes that
can be used to minimize negative effects caused by
bit errors. In addition, our framework also supports
finding packet size templates for finding optimal
sizes.
Finding Size Template. Although decreasing the
size of RES packets may lead to less retransmissions,
the overhead increases due to additional REQ packets
(Figure 9(c)). Therefore, we propose analysing the
potential covert channel before starting any data
transmission. That is, the sender only observes the
channel for sensing activity and tries to calculate an
optimal packet size if other processes are accessing
the sensor frequently (Figure 9(b)).
(1) RES: 1 RES: 1
(2) REQ: 1
(3) R R
(a) Static size.
(1) RES: 1 RES: 2 RES: 3
(2) REQ: 1 REQ: 2
(3) R R
(b) Size Template.
(1) RES: 1 RES: 1 RES: 2 RES: 3
(2) REQ: 1 REQ: 2 REQ: 2
(3) R R
(c) Dynamic Size.
Figure 9: Different transfer modes. (1) sender, (2) receiver,
and (3) another process reading the sensor (R).
Dynamic Packet Size. If an optimal packet size can-
not be determined, e.g., if another process is access-
ing a sensor infrequently, a covert channel might be
unable to transfer any data. Therefore, we introduce
a dynamic packet size approach. Whenever bit errors
are detected using the EDC, it is assumed that another
process is accessing the same sensor as the current
covert channel. As a consequence, the packet size is
reduced, which is indicated by sending the respective
command (Table 3). Reducing the packet size results
in a lower amount of retransmitted data as shown in
Figure 9(c). Packet sizes are increased again if a cer-
tain amount of successfully transferred RES packets
is exceeded.
8 EVALUATION
To evaluate the presented covert channels and the
functionality of our covert channel framework, we use
the following three hardware platforms and OSs:
1. CC2650 SensorTag; TI-RTOS 2.20
2. Raspberry Pi 3, Sense HAT; Raspbian Strech
3. OnePlus 5 & Android Emulator; Android 8.0
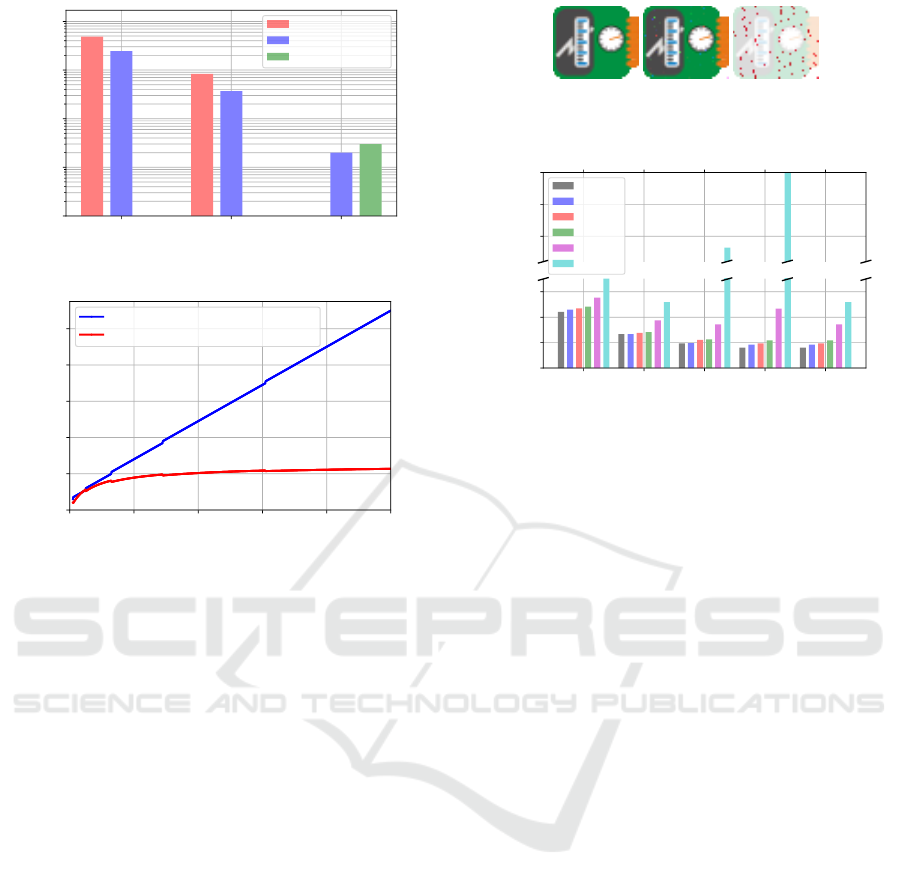
8.1 Covert Channel Data Rates
To evaluate data rates and to validate the classification
shown in Figure 4, we measured data rates on differ-
ent platforms. The data rates we achieved in our eval-
uation are shown in Figure 10. As can be seen there,
only the Raspberry Pi 3 with attached Sense HAT
allows all three covert channels to be implemented.
On the CC2650 SensorTag, only unused registers and
configuration bits can be exploited. Contrary to that,
the only side-channel that can be exploited in Android
is triggering sensors. Both covert channels imple-
mented on the CC2650 SensorTag running TI-RTOS
Sensing Danger: Exploiting Sensors to Build Covert Channels
109
Unused
Register
Configuration
Bits
Triggering
Sensors
10
0
10
1
10
2
10
3
10
4
Data Rate [bit/s]
4844
bit/s
832
bit/s
0
bit/s
2448
bit/s
366
bit/s
20
bit/s
0
bit/s
0
bit/s
30
bit/s
CC2650 SensorTag
Raspberry Pi 3
OnePlus 5
Figure 10: Evaluation of covert channel data rates.
0 20 40 60 80 100
Payload ϕ [bit]
0
20
40
60
80
100
χ [bit] / Π [bit/s]
Total packet size χ(Γ, Σ, ϕ) [bit]
Maximum data rate Π(∆, Γ, Σ, ϕ) [bit/s]
Figure 11: Covert channel data rate according to (1).
achieve higher data rates compared to our implemen-
tations on the Raspberry Pi 3 due to the determinis-
tic scheduling of TI-RTOS. Processes in TI-RTOS are
scheduled alternately, compared to the indeterministic
scheduling of Raspbian. Compared to that, the covert
channel based on triggering sensors does not offer a
very high data rate. However, the maximal achiev-
able covert channel data rate Π depends on the time
∆ required for a sensor reading. Π is then defined in
dependence of the payload size ϕ, and the total round
trip size χ(ϕ,Γ) that is comprised of all protocol fields
(Γ), EDC (dlog
2
(Γ + ϕ)e), and ECC (Σ).
Π(∆,Γ, Σ,ϕ) = ϕ/(χ(Γ, Σ,ϕ)∆) (1)
χ(Γ,Σ, ϕ) = Γ + Σ + ϕ +
d
log
2
(Γ + ϕ)
e
(2)
These two functions are evaluated and plotted
for a range of different payload sizes in Figure 11.
The covert channel data rate converges to a value of
24 bit/s on a Raspberry Pi 3 platform. Since we do
not consider any delay caused by the bus or program
execution in (1), we consider our achieved covert
channel data rate of 20 bit/s on that platform, close
to the theoretical maximum.
8.2 EDC Retransmission Functionality
To evaluate the implemented EDC and retransmission
functionality (Section 7.1), as well as the overhead
(a) Source. (b) Re-
ceived.
(c) Errors.
Figure 12: EDC and retransmissions disabled.
1000
1500
2000
No User
User 20s
User 10s
User 5s
User 2s
User 1s
11 bit
static
20 bit
static
37 bit
static
70 bit
static
Template
size
0
100
200
300
Transfer time [s]
Figure 13: Evaluation of different packet sizes.
resulting from such retransmissions we simulated a
noisy covert channel. As evaluation setting, a covert
channel based on triggering sensors on a Raspberry
Pi Sense HAT was used. Noise on these registers
was introduced by running a process that accesses the
same sensor as our covert channel every 10 s. We then
transferred an image (4 kB) over this noisy channel.
Figure 12 shows the original image as well as the re-
ceived image that contains roughly 100 pixel errors if
our EDC based retransmission of packets is disabled.
Enabling these features results in an error-free image
being transferred over our covert channel.
Overhead. Enabling EDC and retransmissions in
a setting without noise introduces an transmission
time overhead of roughly 6%. While the image with
disabled EDC and retransmissions is transferred in
2998 s, transferring the image with EDC and retrans-
missions requires 3169 s. If noise is introduced by a
process that is accessing the sensor every 10 s, trans-
fer time increases to 3989 s in this setting as the noise
requires 123 of 1062 packets to be retransmitted.
8.3 Static / Dynamic Packet Size
To evaluate the performance of different packet sizes
that are supported by our framework (Table 4), we test
these packet sizes with noise generated by different
noise profiles. We test profiles with no interfering user
actions as well as well as profiles where users access
the same sensor that our covert channel is using. The
evaluation results in Figure 13 highlight that there is
no packet size that is capable of providing the fastest
transfer time for each noise profile. However, if sen-
sor access by the user is cyclic, our template method
is able to provide best results for each noise profile.
ICISSP 2019 - 5th International Conference on Information Systems Security and Privacy
110

0 10 20 30 40 50 60 70 80
Time [s]
(1)
(2)
(3)
(4)
Signal [-]
(4) Static 37 bit
(3) Dynamic
(2) Static 11 bit
(1) User 1s
Figure 14: Evaluation of dynamic packet size.
If noise is introduced by a user that is access-
ing the sensor infrequently, or if no user was present
during our template phase, the dynamic switching
of packet sizes implemented in our covert channel
framework is capable of ensuring a reliable and fast
data transfer. Figure 14 evaluates such a scenario
where a user starts to access the same sensor that
our covert channel is using after the data transfer al-
ready started. In our evaluation, we compare two
static packet sizes of 11 bits and 37 bits as well as
our dynamic packet size mechanism that is configured
to switch between packet sizes of 11 bits, 20 bits and
37 bits. We can identify the following three phases
shown in Figure 14, where each data point represents
the successful submission of one data packet or an
interfering sensor access, respectively. (i) In the in-
terval from 0 s to 30 s no interfering sensor access oc-
curs. The dynamic packet size is set to 37 bits since
this ensures the fastest data transfer. Both static vari-
ants transfer packets without errors. (ii) After 30 s,
the user process starts to interfere, and thus packets
with a size of 37 bits cannot be transferred any more
due to the generated noise, as shown in Figure 9(a).
Smaller packets are successfully transferred with a
lower probability in this phase. Our dynamic packet
size approach is now sending command messages to
decrease the packet size. (iii) Starting at 58 s, the dy-
namic packet size approach can successfully transfer
packets again due to decreasing the packet size.
8.4 Comparison to State-of-the-art
The currently fastest data rates were reported for
cache- and DRAM-based covert channels. The
Flush+Flush (Gruss et al., 2016) cache-based covert
channel is capable of data rates of up to 3.8 Mbit/s
while the fastest DRAM-based covert channel
achieves data rates of up to 2 Mbit/s. However, when
comparing these covert channel data rates, it has to
be considered that modern CPU caches and DRAMs
are capable of achieving bandwidths in the range of
20 Gbit/s to 100 Gbit/s (Molka et al., 2015). That
is, the presented covert channels use roughly 1% of
the technology’s possible bandwidth. Other mem-
ory based covert channels (Luo et al., 2015) pro-
vide a data rate of 747 bit/s and are slower than our
fastest covert channel. The fastest reported network-
based covert channel supports data rates of up to some
kbit/s (Zander et al., 2007b); however, it also has to
be considered for these covert channels that the net-
work technology would provide a bandwidth of at
least 100 Mbit/s. Other sensor-based covert channels
reported data rates of 345 bit/s, which matches our
second fastest covert channel. If considering the rel-
atively low bandwidth provided by the I2C bus that
is used in our evaluation, we claim that our presented
covert channel implementations provide highly com-
petitive data rates and bus utilization compared to the
state-of-the-art.
9 CONCLUSION
In this paper, we presented novel exploits that target
unsecured sensor interfaces. We use these exploits to
demonstrate three different sensor-based covert chan-
nels that provide a trade-off between the achievable
covert channel data rate and the likeliness of detect-
ing the malicious behavior. Our fastest covert channel
provides data rates of up to 4844 bit/s, while the slow-
est covert channel only provides a data rate of 20 bit/s
but will not be distinguishable from normal user be-
havior. Our presented Android covert channels are
not detected by state-of-the-art code analysis tools.
We do not claim that the presented list of exploits is
exhaustive, but rather believe that other issues can and
will be found in current embedded sensors. To facil-
itate testing other platforms for security weaknesses,
we provide our covert channel framework on GitHub.
All countermeasures suggested in this paper can eas-
ily be implemented on embedded sensors. Therefore,
this paper highlights the importance of implementing
such countermeasures to mitigate sensor-based covert
channels and to prevent future sensor-related security
issues.
ACKNOWLEDGEMENTS
This work has been performed within the IoSense
(http://iosense.eu) project. This project has received
funding from the Electronic Component Systems for
European Leadership Joint Undertaking under grant
agreement No 692480. This Joint Undertaking re-
ceives support from the European Union’s Horizon
Sensing Danger: Exploiting Sensors to Build Covert Channels
111

2020 research and innovation programme and Ger-
many, Netherlands, Spain, Austria, Belgium, Slo-
vakia. IoSense is funded by the Austrian Federal
Ministry of Transport, Innovation and Technology
(BMVIT) under the program ”ICT of the Future” be-
tween May 2016 and April 2019. More information:
https://iktderzukunft.at/en/.
REFERENCES
Ahsan, K. and Kundur, D. (2002). Practical Data Hiding in
TCP/IP. In Proceedings of the Workshop on Multime-
dia Security at ACM Multimedia, pages 1–8. ACM.
Ameri, A. and Johnson, D. (2017). Covert Channel over
Network Time Protocol. In Proceedings of the 2017
International Conference on Cryptography, Security
and Privacy, pages 62–65. ACM.
Arzt, S., Rasthofer, S., Fritz, C., Bodden, E., Bartel, A.,
Klein, J., Le Traon, Y., Octeau, D., and McDaniel,
P. (2014). FlowDroid: Precise Context, Flow, Field,
Object-sensitive and Lifecycle-aware Taint Analysis
for Android Apps. ACM SIGPLAN Notices - PLDI
’14, 49(6):259–269.
Aviv, A. J., Sapp, B., Blaze, M., and Smith, J. M.
(2012). Practicality of Accelerometer Side Channels
on Smartphones. In Proceedings of the 28th Annual
Computer Security Applications Conference, pages
41–50. ACM.
Berger, J. M. (1961). A Note on Error Detection Codes
for Asymmetric Channels. Information and Control,
4(1):68–73.
Bouyukliev, I. and Jaffe, D. B. (2001). Optimal binary lin-
ear codes of dimension at most seven. Discrete Math-
ematics, 226(1-3):51–70.
Brouchier, J., Kean, T., Marsh, C., and Naccache, D.
(2009). Temperature Attacks. IEEE Security & Pri-
vacy, 7(2):79–82.
Cabuk, S., Brodley, C. E., and Shields, C. (2004). IP Covert
Timing Channels: Design and Detection. In Proceed-
ings of the 11th ACM Conference on Computer and
Communications Security, pages 178–187. ACM.
Carrara, B. and Adams, C. (2016). Out-of-Band Covert
Channels—A Survey. ACM Computing Surveys
(CSUR), 49(2):23.
Chi, Q., Yan, H., Zhang, C., Pang, Z., and Da Xu, L. (2014).
A Reconfigurable Smart Sensor Interface for Indus-
trial WSN in IoT Environment. IEEE transactions on
industrial informatics, 10(2):1417–1425.
Derler, P., Lee, E. A., and Vincentelli, A. S. (2012). Mod-
eling Cyber–Physical Systems. Proceedings of the
IEEE, 100(1):13–28.
Frikha, L., Trabelsi, Z., and El-Hajj, W. (2008). Imple-
mentation of a Covert Channel in the 802.11 Header.
In Wireless Communications and Mobile Computing
Conference, 2008. IWCMC’08. International, pages
594–599. IEEE.
Genkin, D., Pachmanov, L., Pipman, I., Tromer, E., and
Yarom, Y. (2016). ECDSA Key Extraction from Mo-
bile Devices via Nonintrusive Physical Side Channels.
In Proceedings of the 2016 ACM SIGSAC Conference
on Computer and Communications Security, pages
1626–1638. ACM.
Giffin, J., Greenstadt, R., Litwack, P., and Tibbetts, R.
(2002). Covert Messaging through TCP Times-
tamps. In International Workshop on Privacy Enhanc-
ing Technologies, pages 194–208. Springer.
Gruss, D., Maurice, C., Wagner, K., and Mangard, S.
(2016). Flush+Flush: A Fast and Stealthy Cache At-
tack. In International Conference on Detection of In-
trusions and Malware, and Vulnerability Assessment,
pages 279–299. Springer.
Guri, M., Monitz, M., Mirski, Y., and Elovici, Y. (2015).
BitWhisper: Covert Signaling Channel between Air-
Gapped Computers using Thermal Manipulations. In
Computer Security Foundations Symposium (CSF),
2015 IEEE 28th, pages 276–289. IEEE.
Han, W., Cao, C., Chen, H., Li, D., Fang, Z., Xu, W., and
Wang, X. S. (2017). senDroid: Auditing Sensor Ac-
cess in Android System-wide. IEEE Transactions on
Dependable and Secure Computing, (1):1–1.
Instruments, T. (2014). OPT3001 Ambient Light Sensor
(ALS). [Online; accessed 10-March-2018].
Ji, L., Jiang, W., Dai, B., and Niu, X. (2009). A Novel
Covert Channel Based on Length of Messages. In
Information Engineering and Electronic Commerce,
2009. IEEC’09. International Symposium on, pages
551–554. IEEE.
Kim, C. H. and Quisquater, J.-J. (2007). How can we
overcome both side channel analysis and fault attacks
on RSA-CRT? In Fault Diagnosis and Tolerance
in Cryptography, 2007. FDTC 2007. Workshop on,
pages 21–29. IEEE.
Kwon, C., Liu, W., and Hwang, I. (2013). Security Analysis
for Cyber-Physical Systems against Stealthy Decep-
tion Attacks. In American Control Conference (ACC),
2013, pages 3344–3349. IEEE.
Lampson, B. W. (1973). A Note on the Confinement Prob-
lem. Communications of the ACM, 16(10):613–615.
Liu, F., Yarom, Y., Ge, Q., Heiser, G., and Lee, R. B. (2015).
Last-Level Cache Side-Channel Attacks are Practical.
In Security and Privacy (SP), 2015 IEEE Symposium
on, pages 605–622. IEEE.
Longo, J., De Mulder, E., Page, D., and Tunstall, M. (2015).
SoC It to EM: ElectroMagnetic Side-Channel Attacks
on a Complex System-on-Chip. In Intl. W. on CHES,
pages 620–640. Springer.
Luo, C., Fei, Y., Luo, P., Mukherjee, S., and Kaeli, D.
(2015). Side-Channel Power Analysis of a GPU AES
Implementation. In Computer Design (ICCD), 2015
33rd IEEE International Conference on, pages 281–
288. IEEE.
Maurice, C., Weber, M., Schwarz, M., Giner, L., Gruss,
D., Alberto Boano, C., Mangard, S., and R
¨
omer, K.
(2017). Hello from the Other Side: SSH over Robust
Cache Covert Channels in the Cloud. In Proceedings
of the 24th Annual Network and Distributed System
Security Symposium, NDSS. The Internet Society.
ICISSP 2019 - 5th International Conference on Information Systems Security and Privacy
112

Milette, G. and Stroud, A. (2012). Professional Android
Sensor Programming. John Wiley & Sons.
Mirzamohammadi, S., Chen, J. A., Sani, A. A., Mehrotra,
S., and Tsudik, G. (2017). Ditio: Trustworthy Audit-
ing of Sensor Activities in Mobile & IoT Devices. In
Proceedings of the 15th ACM Conference on Embed-
ded Network Sensor Systems, page 14. ACM.
Molka, D., Hackenberg, D., Sch
¨
one, R., and Nagel, W. E.
(2015). Cache Coherence Protocol and Memory Per-
formance of the Intel Haswell-EP Architecture. In
Parallel Processing (ICPP), 2015 44th International
Conference on, pages 739–748. IEEE.
Nguyen, A., Alqurashi, R., Raghebi, Z., Banaei-Kashani,
F., Halbower, A. C., and Vu, T. (2016). A Lightweight
and Inexpensive In-ear Sensing System For Automatic
Whole-night Sleep Stage Monitoring. In Proceedings
of the 14th ACM Conference on Embedded Network
Sensor Systems CD-ROM, pages 230–244. ACM.
Osvik, D. A., Shamir, A., and Tromer, E. (2006). Cache
Attacks and Countermeasures: The Case of AES. In
Cryptographers’ Track at the RSA Conference, pages
1–20. Springer.
Perera, C., Zaslavsky, A., Christen, P., and Georgakopoulos,
D. (2014). Context Aware Computing for The Internet
of Things: A Survey. IEEE Communications Surveys
& Tutorials, 16(1):414–454.
Perrig, A., Stankovic, J., and Wagner, D. (2004). Security
in Wireless Sensor Networks. Communications of the
ACM, 47(6):53–57.
Pessl, P., Gruss, D., Maurice, C., Schwarz, M., and Man-
gard, S. (2016). DRAMA: Exploiting DRAM Ad-
dressing for Cross-CPU Attacks. In USENIX Security
Symposium, pages 565–581.
Poeplau, S., Fratantonio, Y., Bianchi, A., Kruegel, C., and
Vigna, G. (2014). Execute This! Analyzing Un-
safe and Malicious Dynamic Code Loading in An-
droid Applications. In Proceedings of the 21st Annual
Network and Distributed System Security Symposium,
NDSS, pages 23–26. The Internet Society.
Rezaei, F., Hempel, M., Peng, D., Qian, Y., and Sharif,
H. (2013). Analysis and Evaluation of Covert Chan-
nels over LTE Advanced. In WCNC Intl. Conf., 2013
IEEE, pages 1903–1908. IEEE.
Sadeghi, A.-R., Wachsmann, C., and Waidner, M. (2015).
Security and Privacy Challenges in Industrial Internet
of Things. In Proceedings of the 52Nd Annual Design
Automation Conference, pages 54:1–54:6. ACM.
Shannon, C. E. (1948). A Mathematical Theory of Commu-
nication. Bell System Technical Journal, 27(3):379–
423.
Shrivastava, A., Jain, P., Demetriou, S., Cox, P., and Kim,
K.-H. (2017). CamForensics: Understanding Visual
Privacy Leaks in the Wild. In Proceedings of the 15th
ACM Conference on Embedded Network Sensor Sys-
tems, page 13. ACM.
Spreitzer, R. (2014). PIN Skimming: Exploiting the
Ambient-Light Sensor in Mobile Devices. In Pro-
ceedings of the 4th ACM Workshop on Security and
Privacy in Smartphones & Mobile Devices, pages 51–
62. ACM.
Srbinovska, M., Gavrovski, C., Dimcev, V., Krkoleva, A.,
and Borozan, V. (2015). Environmental parameters
monitoring in precision agriculture using wireless sen-
sor networks. Journal of cleaner production, 88.
STMicroelectronics (2015). LSM9DS1 iNEMO inertial
module: 3D accelerometer, 3D gyroscope, 3D mag-
netometer. [Online; accessed 10-March-2018].
STMicroelectronics (2016). HTS221: Capacitive digital
sensor for relative humidity and temperature. [Online;
accessed 10-March-2018].
Suo, H., Wan, J., Zou, C., and Liu, J. (2012). Security
in the Internet of Things: A Review. In Computer
Science and Electronics Engineering (ICCSEE), 2012
Intl. Conf. on, volume 3, pages 648–651. IEEE.
Tuptuk, N. and Hailes, S. (2015). Covert Channel Attacks
in Pervasive Computing. In Pervasive Computing and
Communications (PerCom), 2015 IEEE International
Conference on, pages 236–242. IEEE.
Wang, Z. and Lee, R. B. (2006). Covert and Side Channels
Due to Processor Architecture. In Computer Security
Applications Conference, 2006. ACSAC’06. 22nd An-
nual, pages 473–482. IEEE.
Wu, J., Ding, L., Wang, Y., and Han, W. (2011). Iden-
tification and Evaluation of Sharing Memory Covert
Timing Channel in Xen Virtual Machines. In Cloud
Computing (CLOUD), 2011 IEEE International Con-
ference on, pages 283–291. IEEE.
Xiao, J., Xu, Z., Huang, H., and Wang, H. (2013). Security
Implications of Memory Deduplication in a Virtual-
ized Environment. In Dependable Systems and Net-
works (DSN), 2013 43rd Annual IEEE/IFIP Interna-
tional Conference on, pages 1–12. IEEE.
Yarom, Y. and Falkner, K. (2014). Flush+Reload: A High
Resolution, Low Noise, L3 Cache Side-Channel At-
tack. In USENIX Sec. Symp., pages 719–732.
Yi, X., Bouguettaya, A., Georgakopoulos, D., Song, A., and
Willemson, J. (2016). Privacy Protection for Wireless
Medical Sensor Data. IEEE Transactions on Depend-
able and Secure Computing, 13(3):369–380.
Yu, J., Zhao, J., Chen, Y., and Yang, J. (2015). Sensing
Ambient Light for User Experience-Oriented Color
Scheme Adaptation on Smartphone Displays. In Pro-
ceedings of the 13th ACM Conference on Embedded
Networked Sensor Systems, pages 309–321. ACM.
Zander, S., Armitage, G., and Branch, P. (2007a). A Sur-
vey of Covert Channels and Countermeasures in Com-
puter Network Protocols. IEEE Communications Sur-
veys & Tutorials, 9(3):44–57.
Zander, S., Armitage, G., and Branch, P. (2007b). An Em-
pirical Evaluation of IP Time To Live Covert Chan-
nels. In Networks, 2007. ICON 2007. 15th IEEE In-
ternational Conference on, pages 42–47. IEEE.
Zhang, Y., Juels, A., Reiter, M. K., and Ristenpart, T.
(2012). Cross-VM Side Channels and Their Use to
Extract Private Keys. In Proceedings of the 2012 ACM
Conference on Computer and Communications Secu-
rity, pages 305–316. ACM.
Sensing Danger: Exploiting Sensors to Build Covert Channels
113
