
Mixture of Multilayer Perceptron Regressions
Ryohei Nakano
1
and Seiya Satoh
2
1
Chubu University, 1200 Matsumoto-cho, Kasugai, 487-8501 Japan
2
Tokyo Denki University, Ishizaka, Hatoyama-machi, Hiki-gun, Saitama 350-0394 Japan
Keywords: Mixture Models, Regression, Multilayer Perceptrons, EM Algorithm, Model Selection.
Abstract:
This paper investigates mixture of multilayer perceptron (MLP) regressions. Although mixture of MLP re-
gressions (MoMR) can be a strong fitting model for noisy data, the research on it has been rare. We employ
soft mixture approach and use the Expectation-Maximization (EM) algorithm as a basic learning method. Our
learning method goes in a double-looped manner; the outer loop is controlled by the EM and the inner loop
by MLP learning method. Given data, we will have many models; thus, we need a criterion to select the best.
Bayesian Information Criterion (BIC) is used here because it works nicely for MLP model selection. Our ex-
periments showed that the proposed MoMR method found the expected MoMR model as the best for artificial
data and selected the MoMR model having smaller error than any linear models for real noisy data.
1 INTRODUCTION
Mixture models have been widely used in economet-
rics, marketing, biology, chemistry, and many other
fields. The book by McLachlan and Peel (McLachlan
and Peel, 2000) contains a comprehensive review of
finite mixture models.
When data arise from heterogeneous contexts, it
is reasonable to introduce mixture of regressions as a
class of mixture models. In mixture of regressions,
since the introduction by Goldfeld and Quandt (Gold-
feld and Quandt, 1973), mixture of linear regres-
sions (MoLR) has been focused (Bishop, 2006; Qian
and Wu, 2011) and implemented as library programs
(Leisch, 2004; NCSS, 2013). Around that time,
Bayesian approaches to mixture of regressions were
vigorously investigated using Markov chain Monte
Carlo (MCMC) methods (Hurn et al., 2003).
Since this world is full of nonlinear relationships,
mixture of nonlinear regressions may have the great
potential. The research on the topic, however, has
been relatively few. Huang, Li, and Wang (Huang
et al., 2013) investigated mixture of nonlinear regres-
sions by employing kernel regression, but they as-
sumed that explanatory variable is univariate and the
extension to multivariate will suffer from curse of di-
mensionality; this can be a serious limitation.
As another approach, modal regression (Chen
et al., 2016) estimates the local modes of the distri-
bution of a dependent variable given a value of an ex-
planatory variable. Modal regression, however, will
not give us an explicit representation and the extend-
ability to multivariate data seems not clear.
Since multilayer perceptron (MLP) is a popular
powerful nonlinear model, mixture of MLP regres-
sions (MoMR) will be quite a reasonable model of
mixture of nonlinear regressions; however, MoMR
has hardly been addressed so far.
This paper investigates MoMR. There can be two
types of mixture: hard and soft. In hard mixture a data
point is exclusively classified, while in the latter a data
point belongs probabilistically to every class. Since
soft mixture is more natural for modeling and more
appropriate for computation, we employ soft mix-
ture approach, and use the Expectation-Maximization
(EM) algorithm (Dempster et al., 1977).
This paper is organized as follows. Section 2 re-
views the background of our research, and Section 3
explains modeling, EM solver, and model selection
of MoMR. Then Section 4 describes our experiments
performed to examine how our MoMR works using a
two-class artificial dataset and a noisy real dataset.
2 BACKGROUND
2.1 EM Algorithm
The EM algorithm is a general-purpose iterative algo-
rithm for maximum likelihood (ML) estimation in in-
Nakano, R. and Satoh, S.
Mixture of Multilayer Perceptron Regressions.
DOI: 10.5220/0007367405090516
In Proceedings of the 8th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2019), pages 509-516
ISBN: 978-989-758-351-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
509

complete data problems (Dempster et al., 1977). The
EM and its variants have been applied in many appli-
cations (McLachlan and Peel, 2000).
Suppose that a data point (x,z) is generated with
the density p(x, z|θ), where only x is observable and z
is hidden. Here θ denotes a parameter vector, and let
p(x|θ) be the density generating x. In the EM context,
{(x
µ
,z
µ
)} is called complete data, and {x
µ
} is called
incomplete data, where µ = 1, ··· , N.
The purpose of ML estimation is to maximize the
following log-likelihood from incomplete data.
L(θ) =
∑
µ
log p(x
µ
|θ). (1)
The EM performs ML estimation by iteratively maxi-
mizing the following Q-function, where θ
(t)
is the es-
timate obtained after the t-th iteration.
Q(θ|θ
(t)
) =
∑
µ
∑
z
µ
P(z
µ
|x
µ
,θ
(t)
)log p(x
µ
,z
µ
|θ), (2)
where P(z
µ
|x
µ
,θ
(t)
) =
p(x
µ
,z
µ
|θ
(t)
)
∑
z
µ
p(x
µ
,z
µ
|θ
(t)
)
. (3)
The EM algorithm goes as below.
[EM Algorithm]
1. Initialize θ
(0)
and t ← 0.
2. Iterate the following EM-step until convergence.
E-step: Compute Q(θ|θ
(t)
) by computing the
posterior P(z
µ
|x
µ
,θ
(t)
).
M-step: θ
(t+1)
= argmax
θ
Q(θ|θ
(t)
) and
t ←t + 1.
It can be shown that the EM iteration makes
the likelihood L(θ) increase monotonically; that is,
L(θ
(t+1)
) ≥ L(θ
(t)
), which means {θ
(t)
} converges to
a local maximum.
2.2 MLP Learning Methods
In this paper we employ three MLP learning methods
described below. Hereafter MLP(J) indicates MLP
having J hidden units and one output unit.
The BP algorithm (Rumelhart et al., 1986) is well-
known method of MLP learning. BP uses only the
gradient and goes in an online mode. BP is beautifully
simple and easily adaptable to many layers, used even
for deep learning (Goodfellow et al., 2016).
Although BP is widely used, its learning speed is
usually very slow and its capability to find excellent
solutions is quite limited; thus, to accelerate the con-
vergence and improve the limited capability, several
methods were proposed (Luenberger, 1984). Here we
employ quasi-Newton method called BPQ (BP based
on quasi-Newton) (Saito and Nakano, 1997). BPQ
uses the Broyden-Fletcher-Goldfarb-Shanno (BFGS)
update to get a search direction, and uses 2nd-order
approximation to get a suitable step length. Getting a
suitable step length usually requires a lot of time, but
2nd-order approximation is carried out very quickly.
Recently, singularity stairs following (SSF) has
been proposed as a very powerful learning method of
single MLPs (Satoh and Nakano, 2013). SSF suc-
cessively learns MLPs to stably and systematically
find excellent solutions, making good use of singu-
lar regions generated by using the optimal solution of
one-step smaller model MLP(J−1), and guaranteeing
monotonic decrease of training errors.
2.3 Model Selection
Since we consider many candidates of mixture mod-
els, we need a criterion to evaluate the desirability
of each candidate. For this purpose we make use
of information criterion, which indicates a trade-off
between learning error and model complexity. Al-
though many information criteria have been proposed
so far, we employ the Bayesian information criterion
BIC (Schwarz, 1978), because BIC stably showed
nice performance on MLP model selection (Satoh and
Nakano, 2017).
Let p(x|θ) be a learning model with parameter
vector θ. Given data {x
µ
, µ = 1,···,N}, the log-
likelihood is defined as shown in eq.(1) Let
b
θ be a
maximum likelihood estimate. BIC is obtained as an
estimator of free energy F(D) shown below, where
p(D) is called evidence and p(θ) is a prior of θ.
F
(
D
) =
−
log
p
(
D
)
,
(4)
p(D) =
∫
p(θ)
N
∏
µ=1
p(x
µ
|θ) dθ (5)
BIC is derived using the asymptotic normality and
Laplace approximation.
BIC = −2L(
b
θ) + M logN
= −2
∑
µ
log p(x
µ
|
b
θ) + M logN (6)
BIC is calculated using only one point ML estimate
b
θ, where M is the number of parameters.
We consider another important measure for re-
gression: goodness of fit. Total sum of squares (TSS)
indicates how much variation the data have, resid-
ual sum of squares (RSS) indicates the discrepancy
between the data and the estimates, and explained
sum of squares (ESS) indicates how well a regression
model represents the data. Given data {(x
µ
,y
µ
),µ =
1,··· ,N}, TSS, RSS, and ESS are given as below,
where x are explanatory variables, y is a dependent
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
510

variable, f
µ
= f (x
µ
) is an estimate obtained by a re-
gression function, and y
is a mean of
y
.
TSS =
∑
µ
(y
µ
−y)
2
, RSS =
∑
µ
( f
µ
−y
µ
)
2
(7)
ESS = T SS −RSS (8)
Thus, ESS/TSS (= 1−RSS/TSS) is an important mea-
sure indicating goodness of fit of a regression model.
It is also called coefficient of determination in the lin-
ear regression context.
3 MIXTURE OF MLP
REGRESSIONS
3.1 Modeling of MoMR
This subsection formalizes the MoMR model.
Let x = (x
1
,··· ,x
K
)
T
be K explanatory variables,
and y be a dependent variable. In this paper a
T
de-
notes the transpose of a.
Given data {(x
µ
,y
µ
),µ = 1,··· ,N}, we consider a
mixture of C regression functions. Let f (x|w
c
) be a
regression function of class c(= 1,··· ,C), where w
c
is the weight vector. Since each regression function is
supposed to have a constant term, we extend a vector
of explanatory variables to get
e
x = (1,x
1
,··· ,x
K
)
T
.
MLP of class c has K input units, J
c
hidden units,
and one output unit. It also has weight vectors w
(c)
j
between all input units and hidden unit j(=1,··· ,J
c
),
and weights v
(c)
j
between hidden unit j(=0,1,··· , J
c
)
and an output unit. Then its regression function is
defined as follows.
f (x|w
c
) = v
(c)
0
+
J
c
∑
j=1
v
(c)
j
σ
(w
(c)
j
)
T
e
x
(9)
Here w
c
= (v
(c)
0
,v
(c)
1
,··· ,v
(c)
J
c
,(w
(c)
1
)
T
,··· ,(w
(c)
J
c
)
T
)
T
for c = 1, ··· ,C, and σ(h) denotes the sigmoid activa-
tion function. When J
c
= 1, we consider the following
linear regression function instead of MLP(J
c
=1).
f (x|w
c
) = w
T
c
e
x (10)
We assume the value of y is generated by adding a
noise ε
c
to a value of f (x|w
c
); here, ε
c
is supposed to
follow the Gaussian with mean 0 and variance σ
2
c
.
ε
c
∼ N (0,σ
2
c
) (11)
Then, the dependent variable y follows the following
distribution.
y ∼ N ( f (x|w
c
), σ
2
c
) (12)
Let π
c
be the mixing coefficient of class c. Then,
the density of complete data is described as follows.
p(y,c|θ
c
) = π
c
g
c
(y|f (x|w
c
),σ
2
c
) (13)
Here g(u|m,s
2
) denotes a density function where u
follows one-dimensional Gaussian with mean m and
variance s
2
.
g(u|m,s
2
) =
1
√
2π s
exp
−
(u −m)
2
2 s
2
(14)
The density of incomplete data is written as follows.
p(y|θ) =
C
∑
c=1
p(y,c|θ
c
) =
∑
c
π
c
g
c
(y|f (x|w
c
),σ
2
c
) (15)
Here θ is a vector comprised of all parameters, where
θ
c
is a parameter vector of class c.
θ = (θ
T
1
,··· ,θ
T
c
,··· ,θ
T
C
)
T
, θ
c
= (π
c
, w
T
c
, σ
2
c
)
T
(16)
3.2 EM Solver of MoMR
Bishop describes the framework to solve soft mix-
ture of linear regressions (Bishop, 2006). We extend
Bishop’s framework to solve soft mixture of nonlinear
regressions, including MoMR.
Since class c is a latent variable and cannot be ob-
served, we employ the EM algorithm as a basic learn-
ing method to solve the problem.
Posterior probability P(c|y,θ) indicates the proba-
bility that y belongs to class c under θ.
P(c|y,θ) =
p(y,c|θ)
∑
c
p(y,c|θ)
(17)
Given data D = {(x
µ
,y
µ
),µ = 1,··· ,N}, the log-
likelihood is defined as below.
L(θ) =
N
∑
µ=1
log p(y
µ
|θ) (18)
The Q-function to maximize is shown as below.
Here θ
(t)
denotes the estimate obtained at the t-th step
of the EM, and let f
µ
c
≡ f (x
µ
|w
c
).
Q(θ|θ
(t)
) =
N
∑
µ=1
C
∑
c=1
P(c|y
µ
,θ
(t)
) log p(y
µ
,c|θ)
=
∑
µ
∑
c
P
µ(t)
c
log(π
c
g
c
(y
µ
|f
µ
c
,σ
2
c
))
=
∑
µ
∑
c
P
µ(t)
c
logπ
c
−
1
2
log(2π)
−log σ
c
−
(y
µ
− f
µ
c
)
2
2σ
2
c
(19)
Mixture of Multilayer Perceptron Regressions
511

In the above, we use the following for brevity.
P
µ(t)
c
≡ P(c|y
µ
,θ
(t)
) =
π
(t)
c
g
µ(t)
c
∑
c
π
(t)
c
g
µ(t)
c
(20)
where g
µ(t)
c
≡ g
c
(y
µ
|f
µ(t)
c
,σ
2(t)
c
) (21)
When we maximize the Q-function, we use the La-
grange method since there is an equality constraint
∑
c
π
c
= 1. The Lagrangian function can be written as
follows with λ as a Lagrange multiplier.
J = Q(θ|θ
(t)
) −λ
∑
c
π
c
−1
(22)
The necessary condition for a local maximizer is
shown below for c = 1, ··· ,C.
∂J
∂π
c
=
∑
µ
P
µ(t)
c
/π
c
−λ = 0 (23)
∂J
∂w
c
=
∑
µ
P
µ(t)
c
(y
µ
− f
µ
c
)
σ
2
c
∂ f
µ
c
∂w
c
= 0 (24)
∂J
∂σ
c
=
∑
µ
P
µ(t)
c
−
1
σ
c
+
(y
µ
− f
µ
c
)
2
σ
3
c
=0 (25)
Since we have λ = N from eq.(23) and the equality
constraint, a new estimate of π
c
is given below.
π
(t+1)
c
=
1
N
∑
µ
P
µ(t)
c
(26)
From eq.(25) a new estimate of σ
2
c
is given below.
(σ
2
c
)
(
t
+
1
)
=
∑
µ
P
µ(t)
c
(y
µ
− f
µ
c
)
2
,
∑
µ
P
µ(t)
c
(27)
From eq.(24) we obtain a new estimate of w
c
by
solving the following.
∑
µ
P
µ(t)
c
(y
µ
− f
µ
c
)
∂ f
µ
c
∂w
c
= 0 (28)
Note that the condition eq.(28) is equal to the follow-
ing optimal condition of E
c
(w
c
).
∂E
c
(w
c
)
∂w
c
= 0. (29)
Here the following is sum-of-squares error of class c.
E
c
(w
c
) =
1
2
∑
µ
P
µ(t)
c
( f
µ
c
−y
µ
)
2
(30)
Residual sum of squares (RSS) in MoMR is given as
below.
RSS = 2
∑
c
E
c
(w
c
) =
∑
µ
∑
c
P
µ(t)
c
( f
µ
c
−y
µ
)
2
(31)
In E
c
(w
c
), squared error ( f
µ
c
−y
µ
)
2
for data point µ
is weighted by posterior P
µ(t)
c
. Thus, in MLP learn-
ing of class c, the gradient for data point µ should be
weighted by posterior P
µ(t)
c
. This modification should
be embodied in MLP learning methods.
The learning of MoMR is carried out in a double-
looped manner: the outer loop is controlled by the EM
and the inner loop is controlled by MLP learning BP
or BPQ.
3.3 Model Selection of MoMR
This subsection describes how BIC is calculated in
MoMR.
The density of incomplete data is given by eq.(15).
Then, log-likelihood at the optimal point
b
θ is given as
follows.
L
(
b
θ
) =
N
∑
µ=1
log p(y
µ
|
b
θ)
=
∑
µ
log
∑
c
b
π
c
g
c
(y
µ
|f (x
µ
|
b
w
c
),
b
σ
2
c
)
(32)
Hence, BIC in MoMR is obtained as below.
BIC = −2
∑
µ
log
∑
c
b
π
c
g(y
µ
|f (x
µ
|
b
w
c
),
b
σ
2
c
)
+ M log N (33)
Here M, the number of parameters, is calculated as
follows. We should not forget to count two parame-
ters π
c
and σ
c
in calculating M
c
.
M =
∑
c
M
c
, M
c
=
K + 3 if J
c
= 1
J
c
(K + 2)+ 3 if J
c
≥ 2
(34)
TSS, RSS and ESS in MoMR are shown below,
where each data point µ is weighted by posterior P
µ(t)
c
.
TSS =
∑
µ
∑
c
P
µ(t)
c
(y
µ
c
−y)
2
(35)
RSS =
∑
µ
∑
c
P
µ(t)
c
( f
µ
c
−y
µ
)
2
(36)
ESS = T SS −RSS (37)
Goodness of fit ESS/TSS in MoMR is calculated us-
ing the above.
4 EXPERIMENTS
4.1 Design of Experiments
The following 26 models are considered for each
dataset. Models are given numbers, which are used
in the figures and explanations shown later.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
512
(a) Models 1 to 10: 10 single MLP(J) regressions:
J = 1,··· ,10,
(b) Models 11 to 16: 6 mixtures of MLP( J
1
) and
MLP(J
2
) regressions: (J
1
,J
2
) = (1,1), (1,2), (1,3),
(2,2), (2,3), (3,3),
(c) Models 17 to 26: 10 mixtures of MLP(J
1
),
MLP(J
2
) and MLP(J
3
) regressions: (J
1
,J
2
,J
3
) =
(1,1,1), (1,1,2), (1,1,3),(1,2,2), (1,2,3), (1,3,3),
(2,2,2), (2,2,3), (2,3,3), (3,3,3).
Note that MLP( J=1) is replaced with linear regres-
sion here. Thus, Model 1 is a simple linear regres-
sion, Model 11 is a mixture of two linear regressions,
and Model 17 is a mixture of three linear regressions.
Model 12 is a mixture of one linear regression and one
MLP(J=2), and so on. As for the learning of mixture
of linear regressions (MoLR), refer to (Nakano and
Satoh, 2018). A single MLP(J) regression is learned
by SSF or BP if J ≥ 2.
Parameters of BP and BPQ are selected through
our preliminary experiments, as shown in Table 1.
Very weak regularization of weight decay is em-
ployed to prevent weight values from getting huge.
Note that the maximum of sweeps per EM loop needs
not be large since posterior may change during EM
learning. For SSF, maximum of search tokens is set
to be 20. We used a PC with Xeon(R)E5 3.7GHz with
8GB memory for computation.
Table 1: Learning parameters for the experiments.
Parameter BP BPQ
max sweeps/EM loop (MoMR) 500 500
learning rate (MoMR) 0.05 adaptive
weight decay coeff (MoMR) 10
−7
10
−6
max sweeps (Single) 5000 5000
learning rate (Single) 0.05 adaptive
weight decay coeff (Single) 10
−7
10
−6
4.2 Experiments using Artificial Data
We generated one-dimensional 2 class artificial data.
The following two parabolas were used to generate 51
data points for each class by adding Gaussian noise
N (0,0.035
2
). The range of x
1
is [0.1, 1.0].
y
1
= −4(x
1
−0.6)
2
+ 2.0 (38)
y
2
= −2(x
1
−0.6)
2
+ 1.5 (39)
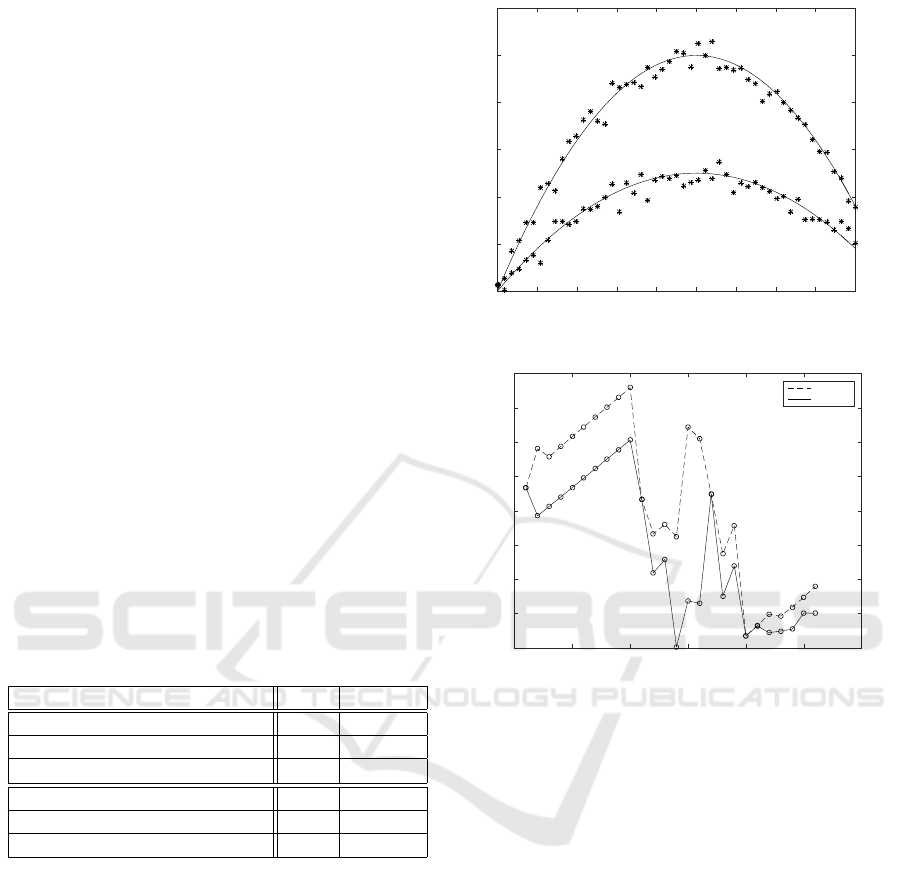
Figure 1 shows two parabolas and 102 data points.
Since MLP(J ≥ 2) can fit a parabola well, two
MLPs(J=2) are expected to fit this artificial data well
as the minimal model.
Figure 2 compares BIC of each model for artificial
data. Horizontal axis indicates model number.
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
x axis
1
1.2
1.4
1.6
1.8
2
2.2
y axis
Figure 1: Artificial data with two generating parabolas.
0 5 10 15 20 25 30
Model number
-200
-150
-100
-50
0
50
100
150
200
BIC
EM+BP
EM+BPQ
Figure 2: BIC comparison for artificial data.
BIC obtained by EM+BPQ was always smaller
(better) than the corresponding BIC by EM+BP ex-
cept pure linear Models 1, 11 and 17. This was caused
by BP’s weak capability to find excellent solutions.
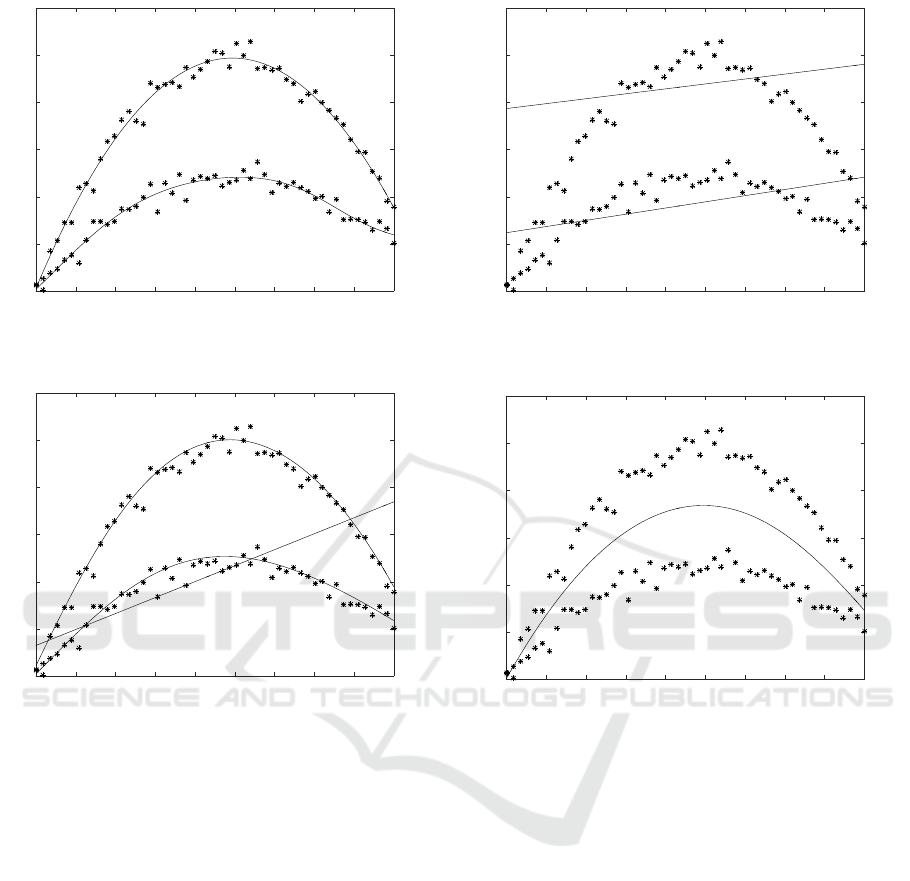
BIC obtained by EM+BPQ selected Model 14,
two MLPs(J=2), as the best among all the models,
which we expected. Figure 3 depicts Model 14. We
can see these two curves are very close to the original
parabolas.
BIC obtained by EM+BP selected Model 20, one
linear and two MLPs(J=2), as the best, whose BIC is
larger than Model 14. Figure 4 shows Model 20.
As the best mixture of linear regressions, BIC se-
lected Model 11, which is composed of two lines.
Figure 5 depicts Model 11. Its BIC was larger (worse)
than that of the best single MLP model (Model 2),
Among single regression models, BIC obtained
by SSF selected Model 2, MLP(J=2), while BIC ob-
tained by BP selected wrong Model 1, linear regres-
sion. Figure 6 shows Model 2, which runs in a middle
empty space between two parabolas.
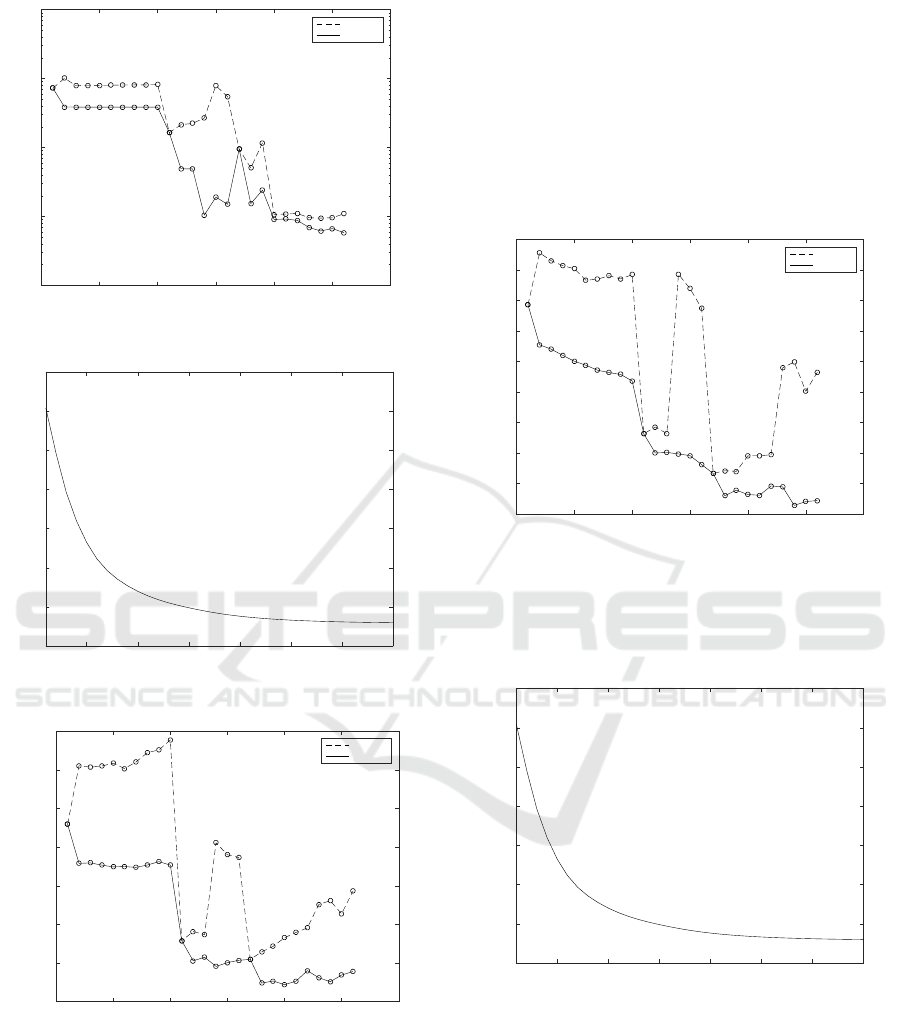
Figure 7 compares residual sum of squares (RSS)
of each model for artificial data. It can be seen that the
Mixture of Multilayer Perceptron Regressions
513
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
x axis
1
1.2
1.4
1.6
1.8
2
2.2
y axis
Figure 3: Best MoMR model obtained by EM+BPQ for ar-
tificial data.
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
x axis
1
1.2
1.4
1.6
1.8
2
2.2
y axis
Figure 4: Best MoMR model obtained by EM+BP for arti-
ficial data.
solid line (EM+BPQ) always indicates smaller RSS
than the dotted line (EM+BP) except pure linear Mod-
els 1, 11 and 17. RSS of Model 14, the best model ob-
tained by EM+BPQ, was 0.1046 and thus its goodness
of fit 1−RSS/TSS was very high 0.9867 since TSS =
7.8436 for artificial data. Moreover, the solid line in-
dicates that mixture models achieved much smaller
RSS than single models. Among mixture models, the
solid line also indicates that MoMR models had much
smaller RSS than mixture of pure linear regressions,
Models 11 and 17. Hence we can say MoMR effec-
tively improved goodness of fit compared with single
regression models or mixtures of linear regressions.
Figure 8 indicates how RSS decreased through
EM learning in the best Model 14. The error de-
creased very smoothly and monotonically.
The CPU time required to get the results for arti-
ficial data is compared below. As average CPU time
required to learn 16 MoMR models per initialization,
EM+BPQ required 1m 12s, while EM+BP required
7m 16s. Although BPQ computes more information
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
x axis
1
1.2
1.4
1.6
1.8
2
2.2
y axis
Figure 5: Best mixture of linear regressions for artificial
data.
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
x axis
1
1.2
1.4
1.6
1.8
2
2.2
y axis
Figure 6: Best single regression for artificial data.
than BP, its average CPU time was smaller because it
converged faster for this dataset.
4.3 Experiments using Real Data
As real data we used Abalone dataset from UCI Ma-
chine Learning Repository. We selected this dataset
because any single powerful regression model cannot
fit well. The dataset has seven numerical explanatory
variables and the number of data points N = 4177.
Figure 9 compares BIC of each model for Abalone
data. It can be seen that BIC obtained by EM+BPQ
was always much smaller (better) than the corre-
sponding BIC by EM+BP except three pure lin-
ear models. BIC(EM+BPQ) selected Model 20,
one linear and two MLPs(J=2), as the best, while
BIC(EM+BP) selected inadequate Model 17, mixture
of two linear regressions, as the best. Note that Model
20 had smaller BIC than any single model or any
mixture of linear regressions. Among single models
MLP(J=7) is the best single model.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
514
0 5 10 15 20 25 30
Model number
10
-2
10
-1
10
0
10
1
10
2
RSS
EM+BP
EM+BPQ
Figure 7: RSS comparison for artificial data.
5 10 15 20 25 30 35
EM loops
600
800
1000
1200
1400
1600
1800
2000
RSS
Figure 8: EM learning of best Model 14 for artificial data.
0 5 10 15 20 25 30
Model number
6500
7000
7500
8000
8500
9000
9500
10000
BIC
EM+BP
EM+BPQ
Figure 9: BIC comparison for Abalone data.
Figure 10 compares RSS of each model for
Abalone data. We can see that EM+BPQ always
obtained much smaller RSS than EM+BP except
three linear models. RSS of the best single model
MLP(J=7) was 1543.36, then the goodness of fit, co-
efficient of determination, was 1−RSS/TSS = 0.6304,
which is not so high. Note that TSS = 4176 for nor-
malized Abalone data. RSS of Model 20, the best
model among all the models obtained by EM+BPQ,
was 727.32, then the goodness of fit was 1−RSS/TSS
= 0.8258, showing nice fitting. RSS of Model 17, the
best mixture of linear regressions, was 865.32, and its
goodness of fit was 0.7928, a bit worse than the best
model. Model 24 had the smallest RSS 656.00 among
all the models, and its goodness of fit was 0.8429.
Goodness of fit for Abalone data can be improved to
this level by using MoMR.
0 5 10 15 20 25 30
Model number
600
800
1000
1200
1400
1600
1800
2000
2200
2400
RSS
EM+BP
EM+BPQ
Figure 10: RSS comparison for Abalone data.
Figure 11 indicates how RSS decreased through
EM learning in the best Model 20. The error de-
creased very smoothly and monotonically.
5 10 15 20 25 30 35
EM loops
600
800
1000
1200
1400
1600
1800
2000
RSS
Figure 11: EM learning of best model for Abalone data.
The CPU time required to get the results for
Abalone data is shown here. As average CPU time
required to learn 16 MoMR models per initializa-
tion, EM+BPQ required 6h 7m 40s, while EM+BP
required 4h 46m 37s.
4.4 Considerations
The experimental results may suggest the following.
Mixture of Multilayer Perceptron Regressions
515

(a) MoMR worked well, selecting the expected model
MLPs(J = 2) as the best for artificial data, and select-
ing the model composed of one linear and two MLPs
as the best for Abalone data. These best models show
smaller BIC and RSS values than those of any mixture
of linear regressions or any single MLP regression.
(b) The learning of MoMR goes in a double loop;
the EM controls the outer loop and MLP learning
method controls the inner loop. As for MLP learning,
a quasi-Newton method called BPQ worked well for
MoMR, while BP worked rather poorly, frequently
finding rather poor solutions, having larger (worse)
RSS than BPQ, selecting inadequate models differ-
ent from those by BPQ. This tendency was caused by
BP’s weak capability to find excellent solutions.
(c) MoMR using EM+BPQ is expected to improve
goodness of fit for data having poor fit by any single
regression model or mixture of linear regressions.
5 CONCLUSIONS
This paper proposes modeling and learning of mix-
ture of MLP regressions (MoMR). The learning of
MoMR goes in a double loop; the outer loop is con-
trolled by the EM and the inner by MLP learning. As
for MLP learning in MoMR, a quasi-Newton worked
satisfactorily, while BP did not work. Our experi-
ments showed MoMR worked well for artificial and
real datasets. In the future we plan to apply MoMR
using EM+BPQ to more data to show MoMR can be
a useful regression model for noisy data.
ACKNOWLEDGMENT
This work was supported by Grants-in-Aid for Scien-
tific Research (C) 16K00342.
REFERENCES
Bishop, C. M. (2006). Pattern recognition and machine
learning. Springer.
Chen, Y.-C., Genovese, C., Tibshirani, R., and Wasserman,
L. (2016). Nonparametric modal regression. The An-
nals of Statistics, 44(2):489–514.
Dempster, A. P., Laird, N. M., and Rubin, D. B. (1977).
Maximum-likelihood from incomplete data via the
EM algorithm. J. Royal Statist. Soc. Ser. B, 39:1–38.
Goldfeld, S. and Quandt, R. (1973). A Markov model
for switching regressions. Journal of Econometrics,
1(1):3–15.
Goodfellow, I., Bengio, Y., and Courville, A. (2016). Deep
learning. MIT Press.
Huang, M., Runze, L., and Shaoli, W. (2013). Nonpara-
metric mixture of regression models. Journal of the
American Association, 108(503):929–941.
Hurn, M., Justel, A., and Robert, C. (2003). Estimating
mixtures of regressions. Journal of Computational
and Graphical Statistics, 12(1):1–25.
Leisch, F. (2004). FlexMix: A general framework for fi-
nite mixture models and latent class regression in R.
Journal of Statistical Software, 11(8):1–18.
Luenberger, D. G. (1984). Linear and nonlinear program-
ming. Addison-Wesley.
McLachlan, G. J. and Peel, D. (2000). Finite mixture mod-
els. John Wiley & Sons.
Nakano, R. and Satoh, S. (2018). Weak dependence on ini-
tialization in mixture of linear regressions. In Proc. of
Int. Conf. on Artificial Intelligence and Applications
2018, pages 1–6.
NCSS (2013). Regression clustering. Technical Report
Chapter 449, pp.1–7, NCSS Statistical Software Doc-
umentation.
Qian, G. and Wu, Y. (2011). Estimation and selection in
regression clustering. European Journal of Pure and
Applied Mathematics, 4(4):455–466.
Rumelhart, D. E., Hinton, G. E., and Williams, R. J. (1986).
Learning internal representations by error propaga-
tion. In Parallel Distributed Processing, Vol.1, pages
318–362. MIT Press.
Saito, K. and Nakano, R. (1997). Partial BFGS update and
efficient step-length calculation for three-layer neural
networks. Neural Comput., 9(1):239–257.
Satoh, S. and Nakano, R. (2013). Fast and stable learn-
ing utilizing singular regions of multilayer perceptron.
Neural Processing Letters, 38(2):99–115.
Satoh, S. and Nakano, R. (2017). How new information
criteria WAIC and WBIC worked for MLP model se-
lection. In Proc. of 6th Int. Conf. on Pattern Recog-
nition Applications and Methods (ICPRAM), pages
105–111.
Schwarz, G. (1978). Estimating the dimension of a model.
Annals of Statistics, 6:461–464.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
516
