
Constrained Coalition Formation among Heterogeneous Agents for the
Multi-Agent Programming Contest
Tabajara Krausburg and Rafael H. Bordini
School of Technology, Pontifical Catholic University of Rio Grande do Sul, Porto Alegre, Brazil
Keywords:
Coalition Formation, Multi-Agent Systems, JaCaMo, Multi-Agent Programming Contest.
Abstract:
This work focuses on coalition formation among heterogeneous agents for a simulated scenario involving
logistic and coordination problems. We investigate whether organising a team of agents into a number of
coalitions, in which agents collaborate with each other to achieve particular goals, can increase the effective-
ness of the team. We apply coalition structure generation specifically to the 2017 multi-agent programming
contest, where the agents controlling various autonomous vehicles form a competing team that has to solve
logistic problems simulated on the map of a real city. We experiment on three approaches with different con-
figurations. The first uses only a task-allocation mechanism, while the other approaches use either an optimal
or a heuristic coalition formation algorithm. Our results show that coalition formation can improve the perfor-
mance of a participating team under some circumstances. In particular, coalition formation can indeed play an
important role when we aim to balance the skills in groups of agents selected to accomplish some given set of
tasks given a larger team of cooperating agents in the presence of dynamically created tasks.
1 INTRODUCTION
In this work, we focus on Coalition Formation (CF)
among heterogeneous agents applied to a simulated
scenario involving logistic and coordination prob-
lems. In order to increase the effectiveness of agents,
we can organise them into groups, in which the agents
collaborate with each other in order to achieve indi-
vidual, common, or global (i.e., system-level) goals.
Such organisation of agents is often called coali-
tion. A coalition is a short-lived and goal-directed
structure, in which the agents join forces to achieve
a goal (Horling and Lesser, 2004). Coalitions are
also used in the context of cooperative game the-
ory (Wooldridge, 2009). From this point of view, a
coalition is a set of agents who may work together.
Each coalition obtains a certain utility represented by
a numeric value. We try to maximise the overall value
of all coalitions in the environment.
Although many applications have used CF to ad-
dress real-world problems, they often do not evaluate
their techniques against other approaches in realistic
problems. This is important in order to assess whether
CF is a suitable technique for a particular problem.
In this work, we evaluate Coalition Structure Gener-
ation (CSG) on the 2017 Multi-Agent Programming
Contest (MAPC) (Ahlbrecht et al., 2018). The Multi-
Agent Programming Contest (MAPC) is an annual in-
ternational event that aims to stimulate research in the
field of programming multi-agent systems. We se-
lected one of its participating teams; the chosen one
is the SMART-JaCaMo team (Cardoso et al., 2018).
We studied how to apply coalition formation tech-
niques to its implementation and we evaluate the per-
formance of the CF techniques on the 2017 MAPC
scenario. In this domain, we have heterogeneous
agents (controlling different types of autonomous ve-
hicles) that must deliver jobs posted by a server; to do
so they need to collect items in various locations on a
real city map and assemble the parts before delivery.
The chosen team uses a task allocation approach to
address this problem and we introduce the formation
of coalitions as a preceding step to task allocation.
The coalition formation process is integrated into
the JaCaMo platform (Boissier et al., 2016) in a
generic way, so it can be used in other projects too.
We use two algorithms for coalition formation de-
signed for different purposes. The first one is an op-
timal coalition formation algorithm that takes into ac-
count constraints; it is named the DC algorithm and
was proposed by Rahwan et al. (Rahwan et al., 2011).
The second algorithm was proposed by Farinelli et.
al. (Bistaffa et al., 2017a) and is a heuristic algo-
rithm for coalition formation based on clustering al-
162
Krausburg, T. and Bordini, R.
Constrained Coalition Formation among Heterogeneous Agents for the Multi-Agent Programming Contest.
DOI: 10.5220/0007374501620169
In Proceedings of the 11th International Conference on Agents and Artificial Intelligence (ICAART 2019), pages 162-169
ISBN: 978-989-758-350-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

gorithms; it is named the C-Link algorithm. This ap-
proach adds great value to the JaCaMo platform, in
the sense that coalition formation algorithms can be
applied in various different JaCaMo domain applica-
tions. As such, it can benefit researchers, lecturers,
and students in their activities.
We perform several experiments focusing on the
performance of the team while working on “jobs” is-
sued by the competition server. We run the Coalition
Structure Generation (CSG) algorithms in order to get
the best partition of agents to work on the jobs; this
way we are able to balance the agents for each job.
When we take into account a set of jobs, we reason
about all the jobs and how we can accomplish all of
them instead of allocating the best agents to only one
job. This is particularly important when jobs sporad-
ically appear in the environment, so concentrating all
the best-skilled agents in one job can be a bad strat-
egy.
This paper is organised as follows. Section 2 in-
troduces some relevant concepts related to the CF ap-
proach. In Section 3, we explain the basis of our
work; then Section 4 details our approach in integrat-
ing CF into Multi-Agent System (MAS). Section 5
describes our experiments and results regarding the
applied coalition formation techniques. We discuss
some related work in Section 6 and Section 7 con-
cludes the paper.
2 BACKGROUND
The coalition formation process could be divided into
three phases: (i) the coalition structure generation; (ii)
solving optisation problem of each coalition; and (iii)
the division of the solution value between the coali-
tion members
1
(Sandholm et al., 1999).
We formally describe the coalition formation pro-
cess through Characteristic Function Games (CFG).
In such games, we have a pair G = hA, vi, where A is
the set of agents and v is a function that assigns a real
value to every coalition, v : 2
A
→ R, which is called
the characteristic function of the game. A coalition C
is a subset of A (C ⊆ A). A coalition structure CS is a
partition of A into mutually disjoint coalitions, i.e., for
all C,C
0
∈ CS, C ∩C
0
=
/
0, C 6= C
0
and
S
C∈CS
C = A.
The value of a coalition structure CS is defined as
V(CS) =
∑
C∈CS
v(C). This is the classic form of the
game; alternatively, some extensions have been pro-
posed (Rahwan et al., 2015).
1
In order to divide the reward among the coalition’s
members, we can use game theory concepts such as the
shapley value (Chalkiadakis et al., 2011).
An extension of CFG was proposed in (Rahwan
et al., 2011) to take into account constaints during the
coalition structure generation. The basic form of a
Constrained Coalition Formation (CCF) game is de-
fined as G = hA, P ,N ,S,vi in which P , N , and S
are, respectively, the sets of positive, negative, and
size constraints. In that approach, the feasibility of
a coalition structure is determined by the coalitions
that are member of it. In other words, the constraints
are on each of the coalitions rather than the overall
coalition structure. A coalition is considered feasible
if it has at least one positive constraint, no negative
constraint, and the size of the coalition is permitted.
A feasible coalition structure has only feasible coali-
tions.
3 DOMAIN
Here, we explain the two basis of our work. The first
is the 2017 MAPC (Ahlbrecht et al., 2018) simulation
in which we perform our experiments on CF. The sec-
ond is the SMART-JaCaMo (Cardoso et al., 2018), the
publicly available code of one of the contestants, to
which we integrate CF algorithms to enable its agents
to group together in order to improve their joint per-
formance. Note that we will not describe the contest
scenario and the SMART-JaCaMo implementation in
details; we will only discuss what is needed for com-
prehension of the work reported here (the reader can
refer to the references above for further details).
3.1 The 2017 MAPC
The 2017 MAPC
2
is based on EIS (Behrens et al.,
2012), a proposed standard for agent-environment in-
teraction. Based on this standard, agents remotely
connect to the contest server in order to receive the
game state from it and to act on the game. In the con-
test domain, a team of agents try to earn as much “vir-
tual money” as possible by delivering jobs announced
by the game through the contest server. Almost all
features of the simulation have random variation (ex-
cept the ones related to the agents) and controlled by
some configuration parameters. For instance, we can
configure the number of agents, the number of steps,
the number of different items, the rate of how often
jobs are created and so on.
In the simulation, agents have 1000 discrete game
steps to delivery jobs. A step is a cycle in which
the server waits for the agents’ action, executes them,
and deliveries the perceptions of the new environment
2
https://multiagentcontest.org/2017/
Constrained Coalition Formation among Heterogeneous Agents for the Multi-Agent Programming Contest
163

state to the agents
3
. Four types of agents are available:
(i) car; (ii) drone; (iii) motorcycle; and (iv) truck.
Each type of agent a contains different levels of skill
in speed, load, battery, and locomotion. In our exper-
iments each team has three agents of each type. The
contest takes place on a map of a realist city (see Fig-
ure 1). The map is partitioned in a number of cells
with sizes of 200 meters, which means an agent with
speed 1 travels 200 meters in one step.
Figure 1: Map of Paris for the 2017 MAPC.
The jobs are generated randomly by the contest
server. Each job requires a number of items to be as-
sembled and the assembled product must be delivered
at the storage indicated by the server. They also have
a start and an end time, which means after the job’s
deadline the server does not accept the delivery of that
job anymore. In this sense, the agents need to coordi-
nate themselves to assemble and deliver all the items
required by it. Items are identified by a name, a vol-
ume, a price
4
, and requirements. These requirements
might be other items and/or tools, in which case we
call them compound items. The items that have no
requirements are called base items. The compound
items are assembled at workshops (yellow marks in
Figure 1); for those that require tools, an agent of the
specific type must be at the workshop carrying the re-
quired tool and performing an action to assist or as-
semble. Jobs only require compound items.
In summary, we choose the 2017 MAPC as a tar-
get application scenario for the following reasons:
• it has a stable/robust simulator;
• the domain is complex because it addresses many
important issues in MAS and simulates a stochas-
tic environment (virtually all variables and actions
have a random component);
• it allows us to modify the number of agents, so we
3
The server can also throw away an action sent by an
agent to simulate an action failure.
4
The price of an item is determined according to the
shops, where agents buy base items; each shop might have
a different value for each item.
can develop our approach using a small number of
agents before we work on scaling it;
• Once we have a stable version of our approach for
this simulation, we can apply it to other complex
domain (e.g., disaster response).
3.2 SMART-JaCaMo Team
We started our development on top of the SMART-
JaCaMo team’s implementation
5
for the contest, and
we integrated CF techniques into it. It was imple-
mented using JaCaMo as the MAS development plat-
form (Cardoso et al., 2018). SMART-JaCaMo agents
use the GraphHopper
6
API to calculate their routes to
get to the desired positions. These routes are eval-
uated according the speed of each vehicle (e.g., a
motorcycle is faster than a truck). When moving
around the city, the vehicles consume battery that is
recharged at charging stations (green marks in Fig. 1).
In order to finish jobs, agents must reach an agree-
ment on what each agent should do to help deliver
the job. This is done by means of task a allocation
process implemented using Contract Net Protocols
(CNPs) (Smith, 1980) in CArtAgO artefacts. When
a job is perceived by the CNP initiator, it decomposes
the main tasks into several subtasks:
• deliver: only trucks are allowed to place bids to
deliver all items from the job (because they have
the largest cargo capacity;
• buying tools: task to buy the tools required to as-
semble compound items.
• buying base items: task for buying the base
items.
Bid values are based on the total route length to com-
plete a task, thus lower is better (with the exception of
bids with value -1, which are invalid bids; e.g., agent
is not skilled to use a required tool). For tasks to buy
tools and items, the agent also sends the shop where
it expects to be able to buy them; this information is
later used in bid selection.
After the bidding phase is completed, the initiator
uses several bid selection rules to determine the win-
ner, starting with the assemble tasks. These priority
rules favour awarding tasks based on a few character-
istics, such as (in order): (i) if the agent has already
won another task to go to the same shop; (ii) if the
agent won the assemble task; or (iii) if the agent has
not won any tasks yet. In the last two (ii and iii), the
route length has to be lower than any other. In all three
the agent needs to have enough load to carry any item
5
https://github.com/smart-pucrs/mapc2017-pucrs/
6
https://github.com/graphhopper/graphhopper
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
164

related to the task. Each time a task is awarded, the
expected load of the winner is updated in the team’s
artefact, which is used in any further calculations.
The coordination of the job execution is done by
M OISE (H
¨
ubner et al., 2007). An agent can com-
mit to two types of missions: assemble and assist.
The assemble mission consists of two goals: to go
to a workshop and to assemble the items. The as-
sist mission has three goals: to buy required bases, to
assist in assembling, and to stop assisting (the agent
has to repeatedly execute assist action until the as-
sembling is completed). Using a M OISE scheme, the
agents know exactly when they must send the actions
to the contest server (assemble and assist actions, in
that case).
4 COALITIONS OF VEHICLES
FOR THE MAPC SCENARIO
In this section we describe our approach to enable ex-
periments on CF in the 2017 MAPC scenario. We will
describe the algorithms, the characteristic function we
created for that scenario, and how we integrate all of
it into MAS.
4.1 The CF Algorithms
We use two algorithms for CF created with dif-
ferent design purposes. The first one is an opti-
mal coalition-formation algorithm that takes into ac-
count constraints (Rahwan et al., 2011). We use the
implementation of the DC algorithm developed by
T.Rahwan. The second algorithm we use for this
work is the algorithm proposed by Farinelli et al.,
named C-Link (Bistaffa et al., 2017a), which was im-
plemented from scratch. It consists of a heuristic al-
gorithm for coalition formation based on hierarchical
clustering algorithms. It does not search through the
entire search space so it can run in reasonable time
even for relatively large instances.
We choose to work with these two algorithms be-
cause they have distinct purposes. One searches for an
optimal coalition structure which increases the con-
fidence in the outcome. The second algorithm is
based on a heuristic approach which delivers a solu-
tion quickly but it might not be the optimal one. We
could handle our problem better by using coalition-
formation algorithms for tasks, but to the best of our
knowledge there are no (publicly available) imple-
mentations for such algorithms. As we already have
an algorithm that outputs the optimal solution and an-
other that runs quickly, we conducted the experiments
using the algorithms described above.
4.2 Integration of CF into MAS
In order to start using CF into MAS, the agents must
be aware of the algorithms and must know how to pass
their private information to the algorithms and then
get the results (through perception). For this purpose,
they are able to use plans that perform operations on a
CArtAgO artefact named CFArtefact
7
, which also in-
forms the agents about the outcome of the algorithms
(in other words, the resulting coalition structure). The
idea behind this artefact is to gather all the necessary
information to partition the set of agents into disjoint
coalitions regardless of the choice of CSG algorithm
to be used in any particular application.
A key part of CF is the coalition value. It mea-
sures how productive the agents are when acting to-
gether. Almost all algorithms that form coalitions will
require some information from the agents in order to
partition the set of agents. Our approach is based on
MCNets (Ieong and Shoham, 2005). We borrow the
rule formalisation of their approach and use it for the
agents to express their marginal contributions. From
the format pattern → value, where pattern is a con-
junction of positive and negative literals, we use the
same idea to allow agents to establish rules such as:
mc
P
∧ mc
N
→ value, where mc
P
⊆ A
CF
and similarly
mc
N
⊆ A
CF
(A
CF
is the set of agents available on the
CFArtefact). The basic idea is that mc
P
represents the
agents that must be on the coalition for it to receive
the rule value and mc
N
is the set of agents that must
not be in the coalition for that to happen.
We argue that CFArtefact is a suitable tool for inte-
grating coalition formation algorithms in any JaCaMo
MAS (or more generally any artifact-based multi-
agent development platform). The CFArtefact allows
a number of features to be specified by the agents:
(i) CCF constraints (positive, negative, and size); (ii)
types of agents; (iii) agent skills; (iv) the tasks that
must be performed; (v) and agents’ contribution; the
contribution value could be the agent’s marginal con-
tribution to coalitions or the synergy between agents.
How this is done in practice will be made clearer later
in the examples below.
4.3 The Characteristic Function
The algorithms we are experimenting with were not
specifically designed to deal with tasks, they are
general-purpose algorithms for coalition formation.
In this sense, we have to insert the notion of tasks into
these algorithms, because in our application scenario
an agent’s contribution depends on the particular task
7
This source code is available at https://github.com/Taba
jaraKrausburg/CoalitionFormationForMAS.
Constrained Coalition Formation among Heterogeneous Agents for the Multi-Agent Programming Contest
165

in question. For that purpose, we use a set of “fake
agents” to represent jobs. For instance, if we have ten
free agents and a set of three jobs, then the set we
want to partition will have thirteen elements, where
each formed coalition will have the constraint to con-
tain at most one job-representing agent. This way we
will know for which job each coalition was formed.
We have to take into account some constraints
while calculating a value for a coalition:
1. How many agents of a given type will be required
for a coalition to accomplish a job (e.g., agents
that can use a required tool).
2. At least one truck must be in each coalition.
3. Two fake agents representing jobs cannot belong
to the same coalition. A coalition can only work
on one job at time.
When the algorithm generates a coalition that does
not pass on these constraints, we do not consider the
marginal contribution of its individual members, but
we only apply some punishments depending on which
constraint was not satisfied.
More specifically, when the coalition satisfies the
constraints, we calculate positive values for the char-
acteristic function as follows. Our equation is based
on the class of m+a functions which is the sum of
a monotonic function and an anti-monotonic func-
tion (Bistaffa et al., 2017a). We calculate the positive
side of adding agents to the coalition and the nega-
tive side of such addition. They are called subadditive
and superadditive functions, respectivelly. Our sub-
additive function establishes a discount based on the
coalition size
8
. In our domain, it is important to use
as fewer agents as possible so that we have more free
agents to accomplish more jobs. We use the following
equation
9
to calculate such value:
subadd(C) = (|C| − 1)
3
(1)
For the superadditive function, we apply to the coali-
tion all the rules of marginal contribution, and for the
rules that fit the positive and negative constraints, we
sum up its value into the coalition value as given in
Equation 2.
superadd(C) =
∑
mc∈MC
value(C,mc) (2)
value(C,mc) =
mc
V
,
if |mc
P
\C| = 0 ∧
(|mc
N
| = 0) ∨
|mc
N
\C| > 0)
0, otherwise
8
This idea is similar to the coalition management cost
in (Bistaffa et al., 2017a).
9
We have determined the power value used in that equa-
tion experimentally.
where
• MC represents the set of agents’ marginal contri-
butions to the coalitions;
• mc represents one marginal contribution rule;
• mc
V
represents the value of a marginal contribu-
tion rule;
• |mc
P
\C| = 0 states that all the agents in the pos-
itive rule of the marginal contribution belong to
coalition C;
• |mc
N
| = 0 states that there is no agent that con-
strains the application of such rule; only the posi-
tive rule of the marginal contribution was set;
• |mc
N
\C| > 0 states that coalition C does not have
all the agents in the negative part of the marginal
contribution rule.
Now, we explain how the agents calculate their
marginal contribution. Each agent receives from the
initiator a set of jobs and inserts in the CFArtefact a
contribution value to each of them (i.e., it inserts a
marginal contribution conditioned on it being on the
same coalition as a fake agent representing a job). For
this calculation we take into account the agent’s dis-
tance to the shops, workshops, and storage relevant to
that job. The normal course of an agent’s action is to
go buy the desired items, then it goes to a workshop
to assemble the compound items, and finally goes to
the storage to deliver the job. Once we have defined
which facilities are in the agent’s route, we calculate
how many steps are necessary to complete the route.
We subtract the agent’s route length from 100 to get
higher values to smaller routes
10
.
5 EXPERIMENT RESULTS AND
ANALYSIS
We now introduce our experiments to evaluate the use
of coalition formation in the 2017 MAPC. It is a com-
plex and stochastic environment and we aim to eval-
uate how much coalition formation can improve the
performance of a team of agents.
5.1 Preliminaries
We mainly experiment with three distinct approaches,
and for the sake of clarity we use short names for each
of them:
• O-CF: it runs the DC algorithm to split the set of
agents before the task allocation takes place;
10
We empirically evaluated that an agent’s route never
takes more than 100 steps.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
166

• H-CF: it runs the C-Link algorithm to split the set
of agents before the task allocation takes place;
• TA-3: it does not run any CF algorithm previ-
ously; the task allocation process considers the set
of all agents in the team;
All approaches make use of the task alloca-
tion technique implemented by the SMART-JaCaMo
team. We remind the reader that our experimenta-
tion is built on top of the SMART-JaCaMo’s code, so
we obey their implementation constraints. We always
wait until three jobs have been announced to start the
whole process. The task allocation algorithm requires
at least one truck to perform a job and we have three
trucks in our set of agents; it thus makes no sense to
work with sets greater than three jobs. Agents that be-
long to a coalition which is about to start the task al-
location process do not have any guarantees that they
will be assigned a task for that job; it is up to the task
allocation algorithm.
5.2 Experiments on a Set of Jobs
In this experiment we are particularly interested in the
job rate configuration. With this value, we can exper-
iment with the frequency of jobs being announced by
the contest server. We specifically use the values of
10%, 25%, 50%, 75% and 100% of the maximum ca-
pacity. In our experiments, the maximum capacity is
the maximum frequency in which we would like to
have a job announced. Apart from the maximum ca-
pacity, the job probability to announce a job also takes
into account the remaining steps of the simulation; as
we show in the following equation:
P(J) = e
(−1×(currentStep/totalSteps))
× rate (3)
• currentStep represents the current step of the sim-
ulation;
• totalSteps represents the total number of steps de-
fined in the server configuration file for the simu-
lation to have;
• rate represents the job rate configured in the
server configuration file;
At the beginning of the simulation we have the high-
est chance of a job being announced by the server; as
the number of the current simulation steps progresses,
we have lower chances to get a new job. For each
approach, and varying the job rate, we executed 50
repetitions of the simulation.
When the job rate is set to 10% of the maximum
capacity, O-CF has better performance than others ap-
proaches (Figure 2a). This is due to the search over
the entire search space (after the constraints being ap-
plied). It can evaluate the combinations of all feasible
coalitions and detect the best coalition structure. In
other words, it can evaluate each set of agents to each
job in order to find out the most suitable agents to a
particular job. This does not happen with H-CF be-
cause the C-Link algorithm tends to join the best pair
of agents based on the linkage function. Once these
agents are put together they will never be split again.
In such cases, if we have two jobs that require one
drone each and we only have two available drones,
H-CF can put these two drones in the same coalition
which makes one of the jobs unfeasible.
Regarding TA-3 with 10% of the maximum capac-
ity, the SMART-JaCaMo gets the first job from the set
and starts the allocation of its tasks. Then, it picks the
second job and only when that task allocation is over
it works on the the third job. From the set of jobs,
agents can be allocated to one, two, or three jobs de-
pending on the agents’ location on the map when the
jobs were announced. In that approach, if two agents
are the best option for the first job (think about the
case of drones which are the fastest agents), they will
be allocated to that job, but one of them might be nec-
essary for the second job, making it unfeasible. Con-
sidering the three approaches, optimal coalition for-
mation can balance the agents to the jobs, and then
allocate more jobs as the agents will have shorter idle
periods.
As we start increasing the job rate, the number of
completed jobs for O-CF remains in first place, but
we can notice the difference between it and TA-3 de-
creasing (see Figure 2b). When we move to 50% of
maximum job rate, we can see that TA-3 is leading
(Figure 2c). This is due to the interval between one
job and another. When the number of jobs sent by the
contest server is high, as it can only announce at most
one job per step, the interval between jobs decreases.
Even though TA-3 cannot allocate all the jobs of the
set to the agents, in few steps new jobs will be sent by
the server and a new execution of the allocation can
be run then. In the long run, the frequency of new
jobs arriving compensates the failures in the alloca-
tion process. For this reason, TA-3 has the best per-
formance, as it allocates the best agents to accomplish
a job, in other words, they have the smallest time-step
to delivery the job.
For job rates of 75% and 100%, TA-3 remains
leading for the same reasons. Furthermore, another
interesting fact can be observed in these experiments.
The H-CF’s performance is approximately equal to
O-CF’s performance. This is also due to the job fre-
quency. Again, as H-CF lets some jobs and agents
behind, with higher job rates this loss is compensated.
The available agents that could not be allocated in the
previous set of jobs may be allocated in the next set
Constrained Coalition Formation among Heterogeneous Agents for the Multi-Agent Programming Contest
167
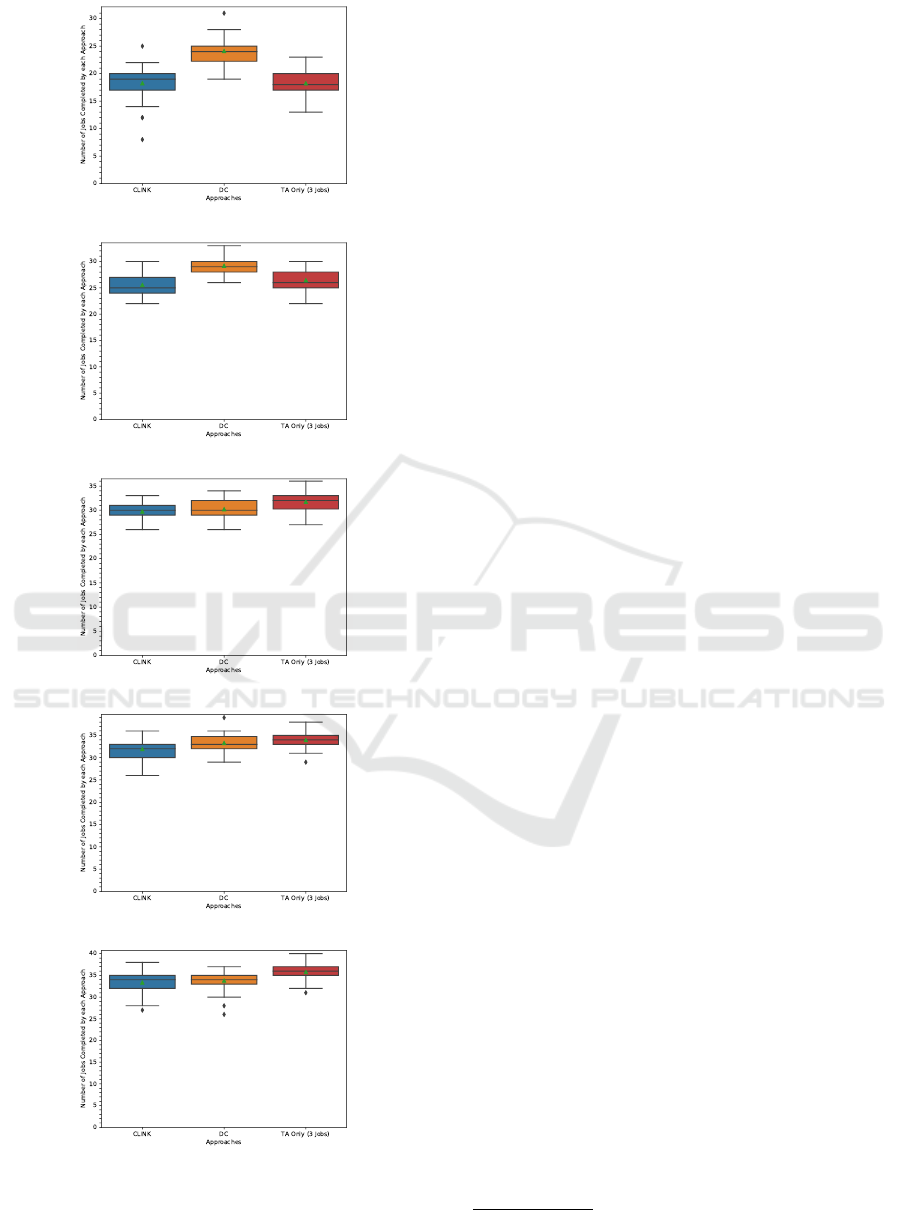
(a) Job rate at 10% of maximum capacity.
(b) Job rate at 25% of maximum capacity.
(c) Job rate at 50% of maximum capacity.
(d) Job rate at 75% of maximum capacity.
(e) Job rate at 100% of maximum capacity.
Figure 2: Number of completed jobs after 1000 steps con-
sidering different job rates. We depict the average of com-
pleted jobs for 50 simulations.
of jobs. In this sense, the team has fewer steps with
idle agents, which result in more jobs being delivered.
As H-CF also outputs only coalitions to perform the
job, which means it does not decide which agent will
perform each part of the work when forming the coali-
tions, it also stays behind TA-3.
6 RELATED WORK
Coalition formation has been applied to various dif-
ferent areas, and in many of them it aims to reduce
operational costs. We emphasize the work developed
for ride-sharing problem (Bistaffa et al., 2017b) and
collective electricity consumption shifting (Akasiadis
and Chalkiadakis, 2017). Our work differs from all
those mentioned above in experimenting with an al-
ready implemented system to evaluate how CF ap-
proach can improve the overall performance. We
analyse under what circumstances forming coalitions
may benefit a team of agents. The aim of the various
projects reported here is to assess the performance of
coalition formation for particular domains. They do
not evaluate if the coalition formation approach is the
best approach for that scenario. They assume it is and
experiment on the parameters and algorithms to solve
efficiently the problem. Most of the related work fo-
cuses on coalition structure formation and in the pay-
ment calculation after achieving the coalition goal.
Apart from the traditional problem of coalition
formation (splitting the set of agent into disjoint and
exhaustive coalitions), much work reported in the lit-
erature proposes to form one coalition to perform one
task (Irfan and Farooq, 2016; Ayari et al., 2017). In
those approaches the coalitions are implicitly formed
as a consequence of the task allocation process, whilst
they differ on how a coalition is formed. As can
be noted, such approaches output a team of agents
to achieve a task
11
. They do not address the coali-
tion formation problem, in which we must partition
a set of agents into disjoint coalitions. In the case
of our experiments, all those approaches would not
be efficient on low job rates. However, there are ap-
proaches that aim to find the best coalition structure
to accomplish a set of tasks, for example (Rauniyar
and Muhuri, 2016). Their work is the closest to ours
because it aims to balance the agents between the set
of task that must be accomplished. Our aim is to inte-
grate coalition formation techniques into systems that
have already been developed. For that purpose, we
maintain the task allocation algorithm implemented
by the SMART-JaCaMo team, and we analyse what
11
Recall that in a team, the agents are aware of the tasks
they will be responsible for.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
168

are the benefits of integrating coalition formation on
an already implemented MAS.
7 CONCLUSIONS
We integrated coalition formation techniques into the
2017 MAPC (Ahlbrecht et al., 2018). In this domain,
we have heterogeneous agents that work together in
order to deliver jobs announced over time. We started
on top of the SMART-JaCaMo team’s implementa-
tion (Cardoso et al., 2018) for the contest. We ex-
perimented with two different algorithms for CSG;
one provides an optimal solution while the other is
a heuristic algorithm. We integrated such algorithms
for use in the JaCaMo platform using a CArtAgO
artefact named CFArtefact. It is a suitable tool to use
CF algorithms in any JaCaMo MAS.
Our experiments showed that CF is important for
low job rates; however, when we increase job rate, in
that particular application domain, the effectiveness
of coalition formation is worse than the original ap-
proach. It cannot beat the approach that uses only
task allocation because its purpose is not to decide
which agent will accomplish each task at the time the
coalitions are formed; it only specifies who will work
together, and with many jobs being announced, that
is not too important (in that specific domain). As a
future work, we aim to investigate how self-interested
behaviour impacts on a team’s performance for the
MAPC. Also, in order to show the generality of our
approach, we aim to apply CF techniques in other do-
mains using our CFArtefact, for instance disaster re-
sponse, in which robots and humans will form coali-
tions to work together in damaged areas.
ACKNOWLEDGEMENTS
This study was financed in part by the Coordenac¸
˜
ao
de Aperfeic¸oamento de Pessoal de N
´
ıvel Superior –
Brasil (CAPES) – Finance Code 001.
REFERENCES
Ahlbrecht, T., Dix, J., and Fiekas, N. (2018). Multi-agent
programming contest 2017. Ann. Math. Artif. Intell.,
84(1):1–16.
Akasiadis, C. and Chalkiadakis, G. (2017). Cooperative
electricity consumption shifting. SEGN, 9:38–58.
Ayari, E., Hadouaj, S., and Ghedira, K. (2017). A dynamic
decentralised coalition formation approach for task al-
location under tasks priority constraints. In Proc. of
18th ICAR, pages 250–255.
Behrens, T., Hindriks, K. V., Bordini, R. H., Braubach, L.,
Dastani, M., Dix, J., H
¨
ubner, J. F., and Pokahr, A.
(2012). An Interface for Agent-Environment Interac-
tion, chapter 8, pages 139–158. Springer.
Bistaffa, F., Farinelli, A., Cerquides, J., Rodr
´
ıguez-Aguilar,
J., and Ramchurn, S. D. (2017a). Algorithms
for graph-constrained coalition formation in the real
world. ACM TIST, 8:1–24.
Bistaffa, F., Farinelli, A., Chalkiadakis, G., and Ramchurn,
S. D. (2017b). A cooperative game-theoretic approach
to the social ridesharing problem. Art. Intell., 246:86–
117.
Boissier, O., H
¨
ubner, J. F., and Ricci, A. (2016). The
JaCaMo Framework, chapter 7, pages 125–151.
Springer.
Cardoso, R. C., Krausburg, T., Bas
´
egio, T., Engelmann,
D. C., H
¨
ubner, J. F., and Bordini, R. H. (2018).
SMART-JaCaMo: an organization-based team for the
multi-agent programming contest. Ann. Math. Artif.
Intell., 84(1):75–93.
Chalkiadakis, G., Elkind, E., and Wooldridge, M. J. (2011).
Computational Aspects of Cooperative Game Theory.
Online access: IEEE (Institute of Electrical and Elec-
tronics Engineers) IEEE Morgan & Claypool Synthe-
sis eBooks Library. Morgan & Claypool Publishers.
Horling, B. and Lesser, V. (2004). A survey of multi-agent
organizational paradigms. KER, 19:281–316.
H
¨
ubner, J. F., Sichman, J. S., and Boissier, O. (2007).
Developing organised multi-agent systems using the
Moise+ model: programming issues at the system and
agent levels. IJAOSE, 1:370–395.
Ieong, S. and Shoham, Y. (2005). Marginal contribution
nets: A compact representation scheme for coalitional
games. In Proc. of 6th CEC, pages 193–202.
Irfan, M. and Farooq, A. (2016). Auction-based task alloca-
tion scheme for dynamic coalition formations in lim-
ited robotic swarms with heterogeneous capabilities.
In Proc. of 7th ICISE, pages 210–215.
Rahwan, T., Michalak, T. P., Elkind, E., Faliszewski, P.,
Sroka, J., Wooldridge, M., and Jennings, N. R. (2011).
Constrained coalition formation. In Proc. of 25th
ICAI, pages 719–725.
Rahwan, T., Michalak, T. P., Wooldridge, M., and Jennings,
N. R. (2015). Coalition structure generation: a survey.
Art. Intell., 229:139–174.
Rauniyar, A. and Muhuri, P. K. (2016). Multi-robot coali-
tion formation problem: task allocation with adaptive
immigrants based genetic algorithms. In Proc. of 9th
IEEE ICSMC, pages 137–142.
Sandholm, T., Larson, K., Andersson, M., Shehory, O., and
Tohm
´
e, F. (1999). Coalition structure generation with
worst case guarantees. Art. Intell., 111:209–238.
Smith, R. G. (1980). The contract net protocol: high-level
communication and control in a distributed problem
solver. IEEE TC, 29:1104–1113.
Wooldridge, M. J. (2009). An Introduction to MultiAgent
Systems. Wiley Publishing.
Constrained Coalition Formation among Heterogeneous Agents for the Multi-Agent Programming Contest
169
