
Multi-agent Systems for Estimating Missing Information in Smart Cities
Davide Andrea Guastella
1,2
, Val
´
erie Camps
1
and Marie-Pierre Gleizes
1
1
Institut de Recherche en Informatique de Toulouse, Universit
´
e de Toulouse III - Paul Sabatier, France
2
Universit
`
a degli Studi di Palermo, Italy
Keywords:
Smart City, Cooperative Multi-agent Systems, Missing Information Estimation.
Abstract:
Smart cities aim at improving the quality of life of citizens. To do this, numerous ad-hoc sensors need to be
deployed in a smart city to monitor the environmental state. Even if nowadays sensors are becoming more and
more cheap their installation and maintenance costs increase rapidly with their number. This paper makes an
inventory of the dimensions required for designing an intelligent system to support smart city initiatives. Then
we propose a multi-agent based solution that uses a limited number of sensors to estimate at runtime missing
information in smart cities using a limited number of sensors.
1 INTRODUCTION
The concept of Smart City refers to a territorial
context where the use of human and natural re-
sources, properly managed through different Informa-
tion and Communications Technologies (ICTs), al-
lows the creation of an ecosystem that provides in-
tegrated and more intelligent systems (Roscia et al.,
2013). The concept of smart city remains strongly
ambiguous; it has been growing from empirical ex-
periences and therefore a systemic theoretical study
about this phenomenon still lacks (Dameri, 2013). A
work commissioned by the European Union defines
smart city initiatives as multi-stakeholder municipally
based partnerships aimed at addressing problems of
common interest with the aid of ICTs, which sup-
ports the smart classification (Manville et al., 2014).
Dameri (Dameri, 2013) analyzed five areas of study
concerning the smart city: (i) intelligent city, (ii) dig-
ital city, (iii) sustainable city, (iv) technocity and (v)
well-being city. However, even if such distinction al-
lows to define precisely what is a smart city, these
concepts share some common aspects. Thus, they do
not represent disjoint areas of analysis. In this paper
we focus on intelligent, sustainable and well-being
city. An intelligent city is able to produce knowl-
edge and to translate it into unique and distinctive
abilities; this city is smart because it is able to cre-
ate intellectual capital and to ground development and
well-being on this intellectual capital. A sustainable
city uses the technology to reduce CO2 emissions, to
produce efficient energy, to improve the buildings ef-
ficiency; it aims at becoming a green city. A well-
being city aims at producing the best quality of life
for citizens, but also to create regional attractiveness
both for people and for business. The technology is
only a part of the means used to reach these goals;
also culture, climate, history and monuments are con-
sidered as important success factors (Dameri, 2013).
Well-being is commonly related to the user’s comfort.
Thermal, visual, luminosity and noise are some of the
main indicators used to define a comfortable environ-
ment (Frontczak and Wargocki, 2011). Thermal stan-
dards are required to help building designers to pro-
vide an indoor climate that occupants will perceive
as thermally comfortable (Wong et al., 2014; Ghahra-
mani et al., 2018; Herkel et al., 2008).
Because the smart city concept embraces multidis-
ciplinary fields, it is important to provide a short de-
scription of Internet Of Things (IoT) and Ambient In-
telligence concepts. IoT aims at providing a global in-
frastructure for the information society, enabling ad-
vanced services by interconnecting physical and vir-
tual things based on existing and evolving interop-
erable information and communication technologies.
The main challenge of the IoT is to achieve full in-
teroperability of interconnected devices while guar-
anteeing the trust, privacy and security of communi-
cations (Piette et al., 2016). These interconnected de-
vices become more unobtrusive and thanks to their
embedded sensors they can perceive the physical en-
vironment in which they are situated. Ambient Intel-
ligence provides to ambient systems the mechanisms
necessary to carry out environmental reasoning using
214
Guastella, D., Camps, V. and Gleizes, M.
Multi-agent Systems for Estimating Missing Information in Smart Cities.
DOI: 10.5220/0007381902140223
In Proceedings of the 11th International Conference on Agents and Artificial Intelligence (ICAART 2019), pages 214-223
ISBN: 978-989-758-350-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

a representation of the environment perceived by IoT
devices. Ambient systems are designed to provide
adapted services that respond to an individual, collec-
tive, and social requirement. The term environment
refers to a physical space enriched with sensors and
computational entities that are seamlessly and invisi-
bly interwoven (Pirttikangas et al., 2010). To be con-
sidered as smart or intelligent, an environment needs
to be associated with a representative description that
can be constructed from the perceptions of the ambi-
ent components. These includes the IoT devices that
must be able to interact with other components that
are not known a priori by humans/users. The inter-
actions of ambient components enable a smart city to
enhance its services such as transports, health, cul-
tural events and so on. Nevertheless, avoiding the in-
stallation of new components in an ambient system to
provide precise everywhere and anytime information
on the environment is a difficult task.
After a presentation of some different application
domains for the smart-city in section 2, we present
the main dimensions in designing a system to sup-
port smart cities. Section 3 introduces our research
context as well as our proposition to estimate miss-
ing environmental information in smart contexts. Our
contribution, based on a cooperative multi-agent sys-
tem, allows to avoid the installation of ad hoc sensors.
In section 4 we evaluate the proposed solution using
a real weather dataset. Section 5 briefly describes our
research direction and perspectives.
2 SMART CITIES AND
MULTI-AGENT SYSTEMS
As stated in the previous section, the definition of
smart city embraces different area of analysis and
finds application in different domains. Reviewing all
the smart city applications goes beyond the purpose
of this paper. For this reason we explore different
applications in which the concept of smart city takes
place in order to emphasize the relevance of multi-
agent systems in this domain.
2.1 Multi-agent Systems Application
Domains in Smart Cities
The growing power of sensors and connected devices
makes the Smart Grid gain much attention. A smart
grid can be defined as an autonomous electrical net-
work able to adapt itself to client’s needs in a se-
cured, ecological and economical way. It enables
bidirectional exchanges of electricity and information
through lines. Perles et al. propose an approach based
on multi-agent systems to estimate the voltage of each
bus in an electric network without having sensors in-
side each bus (Perles et al., 2017). As the system
is specifically devoted to the smart grid, information
employed are not heterogeneous.
Roscia et al. propose a model of smart city
that that employs multi-agent systems (Roscia et al.,
2013). The proposed model is based on a system of
systems that embraces different technologies to pro-
vide a basic infrastructure for the definition and the
creation of a smart city. The composition of these
systems will change as technology evolves, generat-
ing new businesses and new interactions. For each
model domain of smart city, each individual device
is associated to an software agent: its behavior is de-
cided specifically according to the domain in which
the agent takes place.
Smart Health provides artificial intelligence and
cognitive computing in order to assist the doctors
when they have to interpret medical data and to es-
tablish the right diagnosis for their patients. In the
context of the 3Pegase project, whose main goal is to
offer an efficient solution to follow-up old people at
their home, an approach based on a multi-agent sys-
tem has been proposed to detect at runtime behav-
ioral anomalies by using feedbacks from the medical
staff (Verstaevel et al., 2018). The system employs
different sensors that track the activity of the users.
This analysis lets the system rise alerts when a deviant
behavior is detected. This solution is not suitable for
large scale applications. As the system uses a limited
number of sensors deployed in a home context, its de-
ployment at large scale remains difficult. Moreover,
the amount of data processed is limited with respect
to the quantity of data produced by sensors at smart
city scale.
Cook et al. propose the MavHome project whose
goal is to create a smart home that acts as a ratio-
nal agent, perceiving the state of the home by means
of sensors (perception of light, humidity, tempera-
ture, smoke, gas, motion) and acting on the envi-
ronment through effectors (in this case, device con-
trollers) (Cook et al., 2006). An agent acts in order
to maximize its goal, which is a function that maxi-
mizes comfort of the inhabitants and minimizes op-
erational costs. This solution assumes that data from
sensors are always available; thus unpredictable situa-
tions where information from sensors are unavailable
are not taken into account.
Karnouskos et al. propose an agent-based solu-
tion for simulating the dynamic behavior of a smart
city (Karnouskos and Nass de Holanda, 2009). Their
proposition simulates discrete heterogeneous devices
Multi-agent Systems for Estimating Missing Information in Smart Cities
215

that consume and/or produce energy. The software
agents, associated to real-world devices, are able to
monitor efficiently the consumption of a high num-
ber of devices. agents are not cooperative and their
behavior is decided a priori. However cooperation
would enable agents to acquire more knowledge and
experience from other agents in order to improve their
own knowledge or act in a more appropriate way in
the environment in which they are situated.
2.2 Challenges in Smart Cities
When dealing with systems to support smart cities, we
have to consider five different challenges (Guastella
and Valenti, 2018). (i) Openness: the system must
be able to work with intermittent devices. For ex-
ample, devices such as city users’ smartphones are
not always available; (ii) Heterogeneity: the obser-
vations that come from heterogeneous devices pro-
duce large volumes of data that have to be pruned and
correlated in order to generate valuable knowledge;
(iii) Large-scale: due to the amount of entities (phys-
ical and virtual) involved in smart cities and the huge
amount of data to process, there is a need for effi-
cient data storing and manipulation techniques. Also,
the data must be always available to the final user;
(iv) Unpredictability: systems to support smart city
initiatives have to be able to continuously self-adapt
to changes that may occur in a high dynamic environ-
ment; (v) Privacy: non-intrusiveness is a key point
when collecting data from ad-hoc sensors in a smart
city context.
Multi-Agent Systems are a promising way to
address these challenges. Indeed, agents are au-
tonomous, they are capable to reasoning and are pro-
acting, thus enabling a system to be intelligent and
able to make anticipations (Olaru et al., 2013). More-
over, each agent has its own local perceptions, knowl-
edge and goals (Georg
´
e et al., 2011). The conception
of a system for addressing the described challenges
requires an ever-increasing reliability that centralized
systems could not provide due to their low perfor-
mance in precise tasks. On the other hand multi-agent
systems are able to get high performance thanks to
their local, distributed intelligence and self-adaptation
ability. The propositions presented in section 2.1
show how multi-agent ambient systems can be used
to assist users in a smart city context. However, there
is a need to design multi-agent systems that are able to
operate in a highly dynamic environment with hetero-
geneous and intermittent sensors by using entry-level
instrumentation. This means that the system must not
require any specific type of device to operate.
Despite the advantages of the reviewed state-of-art
propositions, to the best of our knowledge the prob-
lem of conceiving an efficient technique to estimate
missing environmental information in smart contexts
using mobile and intermittent devices is a field that
remains unexplored. Therefore, our primary inter-
est is to propose a solution to avoid the deployment
of a high number of sensors in smart environments.
In fact, even if nowadays the ambient sensors have
a more and more affordable cost, the deployment of
numerous high-quality sensors in a smart context can
still be an expensive operation due to their installation
and maintenance costs notably. Thus, the definition of
intelligent systems to reduce the costs of both deploy-
ment and maintenance of sensors enables these tech-
nologies to be more attractive for smart cities initia-
tives. Furthermore, our goal is to design an open sys-
tem being capable of performing environmental esti-
mation by means of mobile and intermittent devices
(Figure 1). The openness is crucial in developing a
system that can be deployed at large scale, in the case
of a university campus as well as a smart city.
3 MULTI-AGENT SYSTEM
PROPOSITION
After a brief description of the neOCampus project
devoted to the construction of the campus of the fu-
ture, we present our multi-agent solution to estimate
missing environmental information in smart contexts
by limiting the number of sensors to deploy.
3.1 Context and Objectives
The neOCampus project, supported by the University
of Toulouse III - Paul Sabatier, plays a major role in
terms of technologies that could be employed in smart
cities by doing experiments in a university campus
context (Gleizes et al., 2018). Due to their size, to
the number of users and their mixed activities, univer-
sity campuses can be considered as districts or small
cities. As a matter of fact, more and more researchers
consider university campuses as great places to ex-
periment innovative services and techniques for smart
cities, building what is called a smart campus. With
an area of more than 264 hectares, the campus of the
University of Toulouse III - Paul Sabatier can be con-
sidered as a small city where several thousand data
streams come from heterogeneous sensors placed in-
side and outside the buildings (CO2, energy and fluid
consumption, humidity, luminosity, ...). In such a
context, it is important to collect and integrate in-
formation that come from a large number of ad-hoc
sensors. Moreover, installing and maintaining a large
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
216
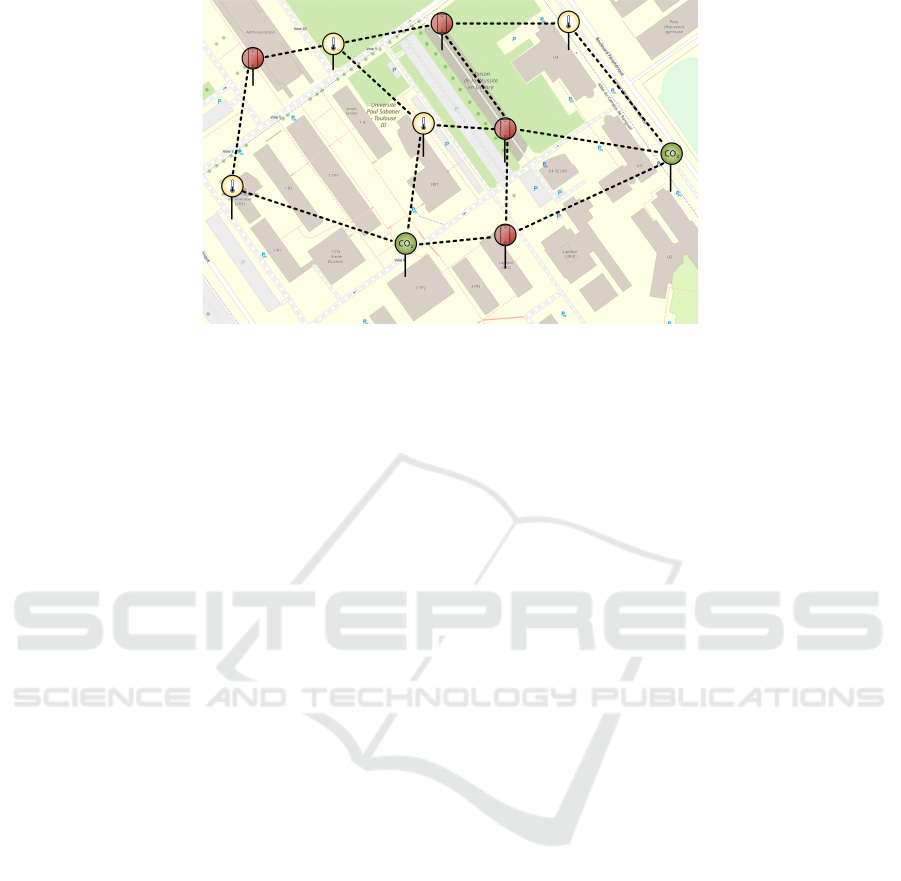
Figure 1: We aims at performing environmental estimation by means of mobile and intermittent devices in smart cities
(obtained through OpenStreetMap (OpenStreetMap contributors, 2017)).
number of sensors to monitor environmental param-
eters of the campus can be expensive. The costs are
mainly related to the installation, the maintenance and
the infrastructures of sensors in existing buildings.
For this reason, we propose a system able to pro-
vide environmental information everywhere and ev-
ery time without having to install numerous sensors.
In our work, we consider that in the University of
Toulouse III - Paul Sabatier the number of people per
day on the campus is around 36 000 among which
80% own a smartphone, but only 30% are volunteer
to share information from their smartphone. We can
consider that these people stay on the campus on aver-
age 6 hours a day, their smartphones provide correct
data about 10% of the time from 5 onboard sensors,
about 40 times each hour. By multiplying these pa-
rameters, we acquire more than 500 000 data every
day only using people’ smartphones. Thus, the use
of such a device represents a good solution for avoid-
ing the installation of ad-hoc sensors, but this solution
opens new challenges:
• Intermittent information: smartphones move
along the campus together with their owners, so
the required environmental information are not al-
ways available. The system has to take into ac-
count the unavailability of smartphones as well as
their displacement within the campus. This en-
ables the system to deal with both openness and
unpredictability;
• Data privacy: personal users’ information have to
be secured in order to prevent malicious activity
or users tracking;
• Data heterogeneity: smartphones are often
equipped with different types of sensors. Because
the aim of our proposition is to design a system
able to provide the maximum number of environ-
mental information, we must define an efficient
solution to correlate and estimate missing infor-
mation;
• Large scale: the system has to be able to col-
lect and process data through an effective and
distributed architecture in order to ensure a high
quality service to users.
These requirements enable to address the chal-
lenges discussed in section 2.2. In neOCampus, we
assume that users agree on installing third-party soft-
ware to support our project: it is easier to find stu-
dents, teachers and researchers motivated to experi-
ment innovative services and techniques.
3.2 Multi-agent System Proposal
Our goal is to propose a multi-agent system to es-
timate missing information in smart environment by
using a limited number of ad hoc devices. To do this
we propose a system based on two different types of
agents: (i) a Real Sensor Agent (RSA) which is any
physical instrumentation that can provide accurate en-
vironmental information value (such as a tempera-
ture), and a (ii) Virtual Sensor Agent (VSA) which is
responsible for the estimation, at a given point of the
environment, an information that a real sensor would
perceive if it was situated at the VSA’s location. The
goal of a VSA is to provide an accurate estimation
and an approximated confidence zone, that represents
an area of the physical environment where mobile de-
vices provide, through their sensors, reliable values
to be used by the VSA in order to estimate the en-
vironment state. The confidence zone is defined as
a polygon centered in the position where the corre-
sponding VSA is situated. The RSAs are autonomous
and aware of the state of their local physical environ-
ment; they send their perceptions to VSAs. In this
Multi-agent Systems for Estimating Missing Information in Smart Cities
217
way, RSAs support VSAs in pursuing their goal. This
is the basis of the cooperative process; it consists in
the exchange of information perceived by RSAs with
VSAs in order to allow the latter to estimate environ-
mental information whereas real sensors are actually
missing at the VSA location.
Algorithm 1 describes the behavior of a RSA. At
line 2, the RSA perceives the physical environment
through an ad hoc sensor. We assume that a VSA
is associated to a RSA and a RSA are associated if
the RSA is situated within the confidence zone of the
VSA. At line 4 the RSA checks if a VSA sent an as-
sociation request. At line 5 the RSA gets the list V
of associated VSAs. At line 6 the RSA sends its last
perception to the VSAs in V .
Algorithm 1: RealSensorAgent.
1: {—perceive—}
2: p ← perceiveFromSensor()
3: {—decide and act—}
4: checkAssociations()
5: V ← getAssociatedVSAs()
6: send(p,V)
Algorithm 2 describes the behavior of a VSA. Ini-
tially a VSA is associated to a predefined confidence
zone that has an octagonal shape that further evolves.
The algorithm starts by getting the list R of associated
RSAs within the confidence zone (line 2). At line 3
the VSA sends an association request to the RSAs
inside its confidence zone. Once associated, a RSA
sends regularly its perception to a VSA. At line 4 the
VSA receives the perceptions of the RSAs in its con-
fidence zone. At line 6 the VSA evaluates the pairs of
RSAs and returns the set D of data fields. The pairs
of RSAs are chosen to be the most aligned with re-
spect to the VSA. A data field between two sensors
is a vector field in the Euclidean space. Each point is
associated to a vector which is oriented towards the
sensor which provides a higher data value; the mag-
nitude is the value of the gradient between the data
perceived by the sensors. Figure 2 shows an example
of gradient between two sensors T
a
and T
b
.
Algorithm 2: VirtualSensorAgent.
1: {—perceive—}
2: R ← getRSAsInConfidenceZone()
3: associateTo(R)
4: P ← receivePerceptionsOfRSAs()
5: {—decide and act—}
6: D ← evaluateRSAsPairs(R, O)
7: e ← evaluateEstimation(D)
8: updateconfidenceZone(D)
t
a
=19°
t
b
=21°
T
a
T
b
Figure 2: Example of a data field between T
a
and T
b
. The
data field is oriented towards T
b
since t
b
> t
a
.
At line 7 the environment state is estimated using
the data fields in D. Finally, the confidence zone is
enlarged or reduced according to the data fields in D
(line 8). Standard techniques are used to determine
the pairs of RSAs which provide data fields that are
considered as outliers, so to be excluded from the con-
fidence zone. Then the VSA cooperates with RSAs
and modifies its confidence zone. However, the VSA
does not have any knowledge about how to shape the
confidence zone in an optimal way in order to keep
only the best pairs of RSAs. Thus, the VSA reasons
on the perceptions and the location of the RSAs in or-
der to determine if they have to be excluded or not
from the confidence zone of a VSA.
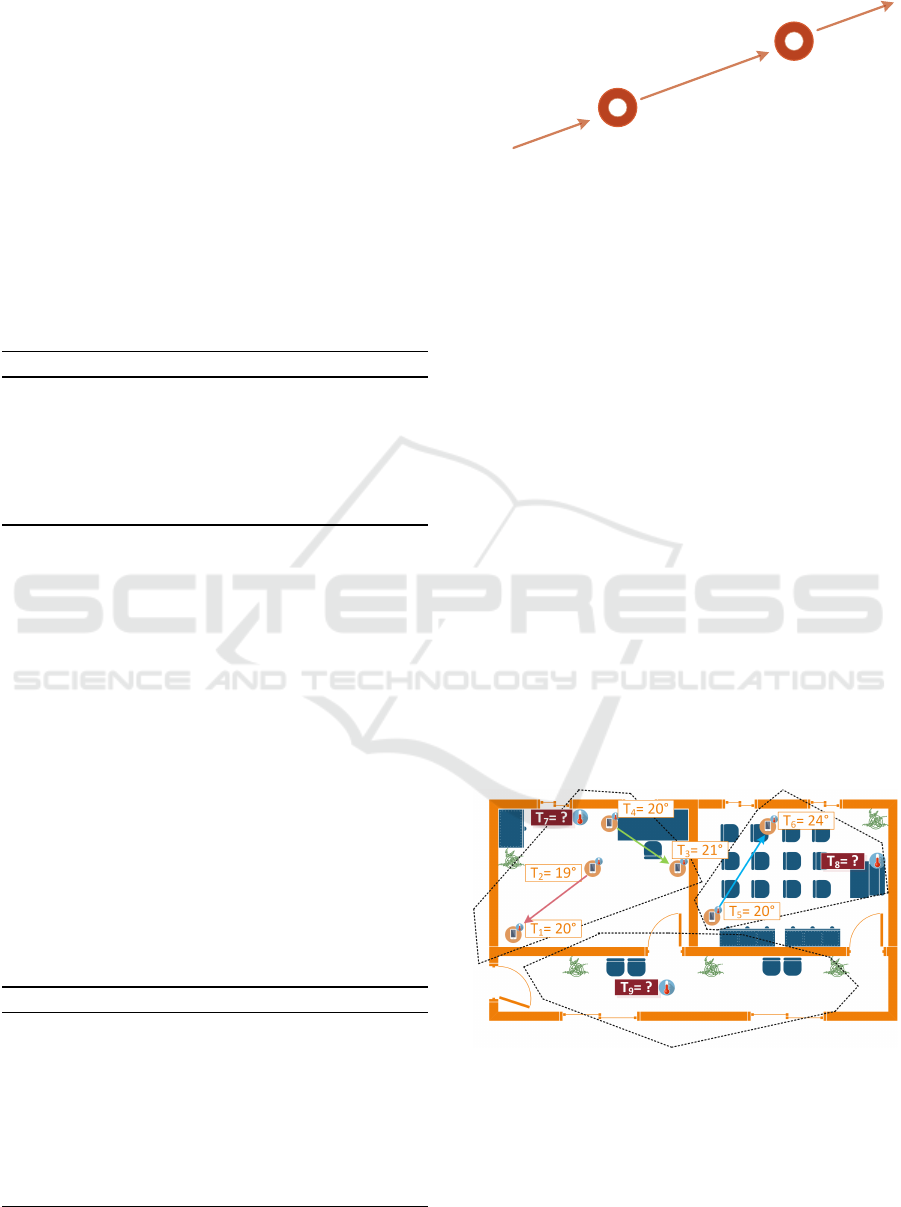
3.3 Case Study
In the scenario illustrated in Figure 3 there are two
rooms including four temperature sensors whereas the
corridor does not contain any real sensor available.
In our proposed multi-agent system solution, RSAs
correspond to ad hoc devices they are associated with
(T
1
, T
2
, T
3
, T
4
, T
5
, T
6
), whereas T
7
, T
8
T
9
are VSAs.
Figure 3: Case study illustration. The dashed zones repre-
sent the confidence zones of VSAs T
7
, T
8
and T
9
.
The solving process for estimating the tempera-
ture in T
7
, T
8
and T
9
is roughly the following:
1. Each RSA perceives the physical environment
through its sensor and spreads it into the virtual
environment.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
218

2. The RSAs situated inside a VSA’s confidence
zone (represented by a black dotted line in Fig-
ure 3) are associated to the corresponding VSA
and the perceptions of the RSAs are sent regularly
to this VSA. Thus T
1
, T
2
,T
3
, T
4
send their percep-
tions to T
7
, while T
5
, T
6
send their perceptions to
T
8
.
3. The VSA determines pairs of RSAs within its
confidence zone. It sorts the RSAs in its confi-
dence zone according to their distance. Each RSA
is coupled with the most aligned RSA with respect
to the VSA. The pairs (T
3
, T
4
) and (T
1
, T
2
) are
formed by T
7
, the pair (T
5
, T
6
) by T
8
.
4. Each VSA evaluates the data field provided by the
pairs of RSAs.
5. The data fields are used to estimate the environ-
mental state.
6. The VSA T
9
cannot estimate its current value
because there is no real sensor in its confidence
zone. Its confidence zone cannot be updated.
This is only a didactic example with homogeneous
sensors but in a real world scenario, different situa-
tions have to be considered: (i) an information has
to be estimated in an environment where there is no
sensor capable of providing the same type of infor-
mation; (ii) there is no sensor available in a certain
room; (iii) sensors can be intermittent and imprecise:
there is no certainty of obtaining precise and reliable
informations at a given instant from sensors.
4 EXPERIMENTAL RESULTS
As the campus of the University of Toulouse III - Paul
Sabatier is currently being instrumented and not oper-
ational, we evaluated our solution on a freely weather
dataset using available temperatures in degree Celsius
recorded by Arpae-SIMC, a weather service of the
Emilia-Romagna region in Italy. This service pro-
vides weather warnings to the Italian Civil Protec-
tion Department (Bressan et al., 2017). We consider
the average daily air temperatures at 2 meters of al-
titude collected over a period of time that goes from
September 8 2017 to April 25 2018 (196 days) from
80 weather stations (Figure 4). We do not take into
account the days where stations were not operational.
The dataset consists in an array of 196 × 80 numer-
ical values. For each station the dataset is provided
with geographic coordinate (longitude and latitude)
that were projected to the Cartesian plane through the
Mercator projection (Monmonier, 2010).
4.1 Evaluation of the Multi-agent
System Proposal
To evaluate our proposition we applied a leave-one-
out cross validation: for each experiment a precise
station has been replaced by a VSA in order to eval-
uate the estimation from the remaining stations. This
evaluation has been done using the optimal confi-
dence zone for each sensor. That is, for each sen-
sor the method has been executed once for evaluat-
ing the best confidence zones and then for estimating
the temperature using the confidence zone previously
found. Each VSA contains initially all the weather
stations within its confidence zone. Moreover, the
formed pairs of RSAs have different weights accord-
ing to the position between the VSA and the RSAs:
this influences the estimation of the VSA. For this
reason, the initial error of each station varies. Each
station, replaced by a VSA to do the leave-one-out
validation, tries to reduce its confidence zone to keep
only the stations that are near the VSA and situated in
a homogeneous environment. Figure 5 shows the av-
erage error and the standard deviation of each station
during the considered 196 days together with a line
plot that marks the error produced by the technique
based on cluster analysis and normalized convolution
presented in section 4.2. The average overall error
is just 0.036 degree. Figure 6 shows the cumulative
error: each bar indicates the amount of absolute av-
erage error for a certain percentage of samples. The
difference between the absolute error of the proposed
technique is comparable to a pipeline of state of art
methods we present in section 4.2. Moreover, there is
a small number of samples (10%) for which the pro-
posed solution behaves better by evaluating a more
reliable confidence zone and thus obtaining a more
precise estimation.
Figures 7 shows the confidence zones of weather
stations 3, 10, 80 and 29 respectively. Figures 7a–
7c show confidence zones of VSAs that take into ac-
count weather stations placed in different, far envi-
ronments because their data fields are not identified
as outliers. As shown in the error bar plot in Figure 5
these stations have a relevant average error. Figure 7d
shows an example of confidence zone where the in-
volved weather stations are in a similar environment.
The confidence zones in Figure 7a, 7b and 7c assume
a star shape because in the corresponding directions
there is not enough information to decide if they have
to be modified. This is due to the fact that the sen-
sors used in the experimentation are fixed. By using
mobile devices as sensors, the VSAs will be able to
estimate the confidence zone in a more precise man-
ner.
Multi-agent Systems for Estimating Missing Information in Smart Cities
219
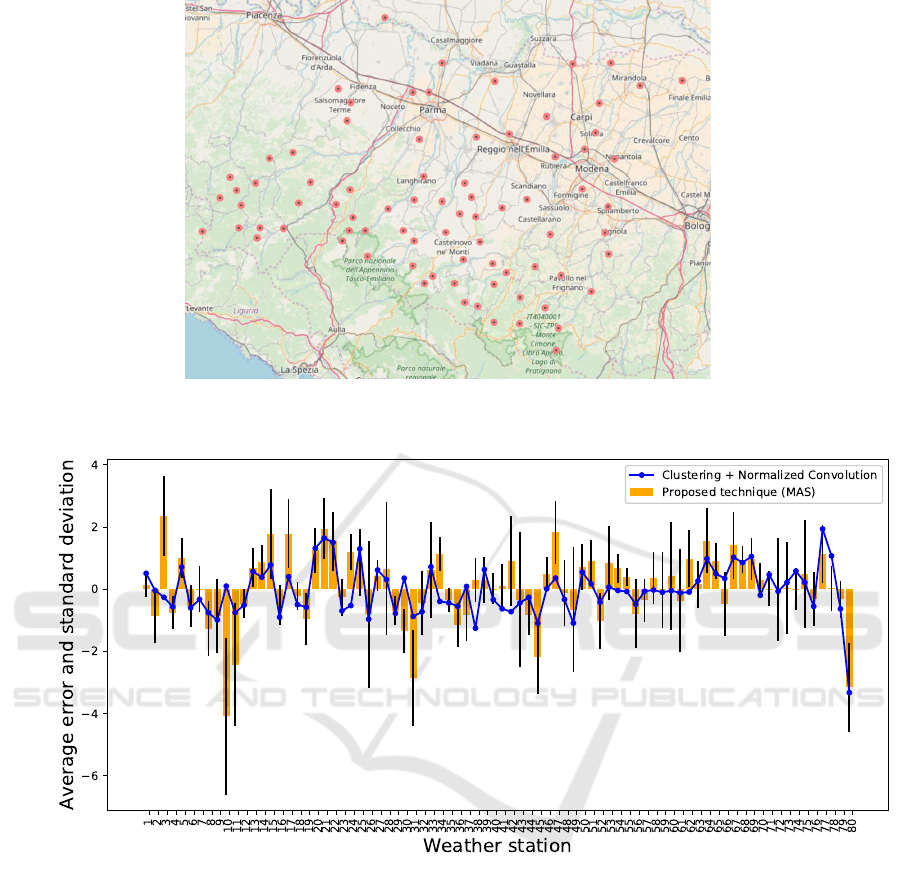
Figure 4: The map of Emilia-Romagna (obtained through OpenStreetMap (OpenStreetMap contributors, 2017)). The stations
are indicated by the red dots.
Figure 5: Error bar of estimated temperatures (degree Celsius) for each station.
Figure 8 shows the error plot for the weather sta-
tions 3, 10, 80 and 29. The error for station 3 in-
creases while reducing its confidence zone: as shown
in Figure 7a the confidence zone takes into account
weather stations that are not situated in a homoge-
neous environment. The stations 10 and 29 maintain a
low error rate. The error for station 80 is also reduced
as the confidence zone of the weather station reduces.
The proposed solution was coded in Java lan-
guage. For each station the algorithm takes about a
second to execute the entire leave-one-out validation
process for all the samples. The experiments were
carried out on an entry-level machine equipped with
i7-7820HQ, 32GB RAM and Windows 10.
4.2 Comparison to Standard
Techniques
We compared the results of the proposed solution
to a pipeline of standard techniques using the same
dataset and leave-one-out validation (Guastella and
Valenti, 2018). This pipeline, implemented as a pre-
liminary study for the problem of estimating missing
environmental information, includes Voronoi tessel-
lation to determine the confidence areas of the sta-
tions (Okabe et al., 2000), hierarchical clustering to
group together the stations that behave in a similar
manner (Rafsanjani et al., 2012) and normalized con-
volution to estimate missing information (Knutsson
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
220
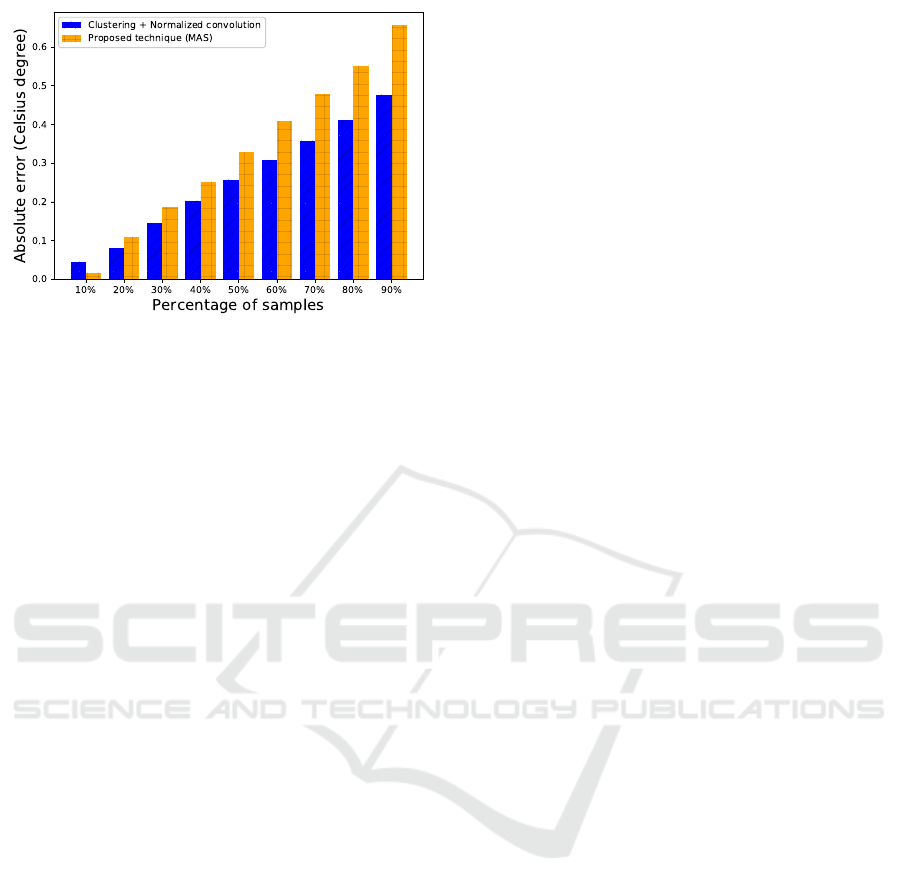
Figure 6: Cumulative error (degree Celsius).
and Westin, 1993). The areas of two or more stations
are merged if their Voronoi areas are adjacent and
they are grouped together by the clustering process.
Finally, for a given point, a normalized convolution
is used to estimate a missing environmental informa-
tion using the stations in the corresponding relevance
area. Normalized convolution is a standard method
used to reconstruct incomplete or uncertain data from
a spatio-temporal signal (Pham et al., 2006), widely
used in geo-statistical applications (Higdon, 1998;
Lemos and Sans
´
o, 2006).
The pipeline based on Voronoi, clustering and nor-
malized convolution shows better results with respect
to the multi-agent proposal because the optimal sub-
set of sensors is used to estimate missing informa-
tion. This is due to the fact that the clustering and the
Voronoi tessellation establish a priori the best groups
of sensors to be used for the estimation by using all
the available data. In this case the confidence zones
are evaluated after the clustering process; thus any
modification at a single real sensor implies a recon-
figuration of the entire system. So this pipeline can
be used in the case of weather stations, but cannot
be used when considering mobile and intermittent de-
vices.
With respect to the pipeline, the multi-agent pro-
posal has the advantage of being able to enlarge or
reduce the confidence zone of a VSA in a dynamic
way according to the knowledge of the RSAs that are
within the confidence zone at a given time. More-
over, we assume that a RSA is not fixed because it is
related to a smartphone device: if one or more RSAs
are being moved, classical approaches such as cluster-
ing need an entire reconfiguration of the system that
could require a significant amount of time. Also, the
multi-agent system has the advantage of being able to
continuously learn using intermittent devices without
reconfiguring the entire system at runtime.
5 CONCLUSION AND
PERSPECTIVES
After a discussion of the state-of-art contributions that
exploit multi-agent systems in the context of smart
city, we presented the neOCampus project devoted
to our work. Then, we introduced a multi-agent sys-
tem to estimate missing information in smart environ-
ments. The goal of the proposed solution is to provide
anytime and everywhere accurate information where
ad hoc sensors are missing. The solution does not
require any parameter and is able to provide an esti-
mation of the environmental state at runtime.
Our work is a preliminary study to address the
challenges discussed in section 2.2. The autonomous,
adaptable and pro-acting behavior of agents allows
the system to work with intermittent devices, thus ad-
dressing the openness problem. Moreover, distribut-
ing the intelligence among all the agents allows a de-
ployment of the system at large scale. Unpredictabil-
ity is addressed through the dynamics of the agents.
In fact, a VSA is currently able to provide an esti-
mation through the RSA that are situated within its
confidence zone. Moreover, a VSA will be capable of
providing an estimation even if different RSAs are ex-
cluded from the confidence zone or they move within
it. This avoid the system to do an entire reconfigu-
ration. Even if it has not been considered, privacy
can benefit from multi-agent systems: agents have
a local behavior, so a security problem involving an
agent would be locally limited, so that the system is
being able to easily identify and restore the entity con-
cerned.
As soon as the campus of University of Toulouse
III - Paul Sabatier is sufficiently instrumented we aim
to conduct an in vivo experimentation using data com-
ing from sensors within the campus and to compare
the obtained results to state-of-art techniques to pro-
vide an innovative infrastructure for the smart cam-
pus. The proposed solution currently focuses on ho-
mogeneous information and provides promising re-
sults. Our future work will focus on processing het-
erogeneous and intermittent information.
ACKNOWLEDGEMENT
This work is supported by the neOCampus initiative
(neocampus.org) from the University of Toulouse III
- Paul Sabatier.
Multi-agent Systems for Estimating Missing Information in Smart Cities
221
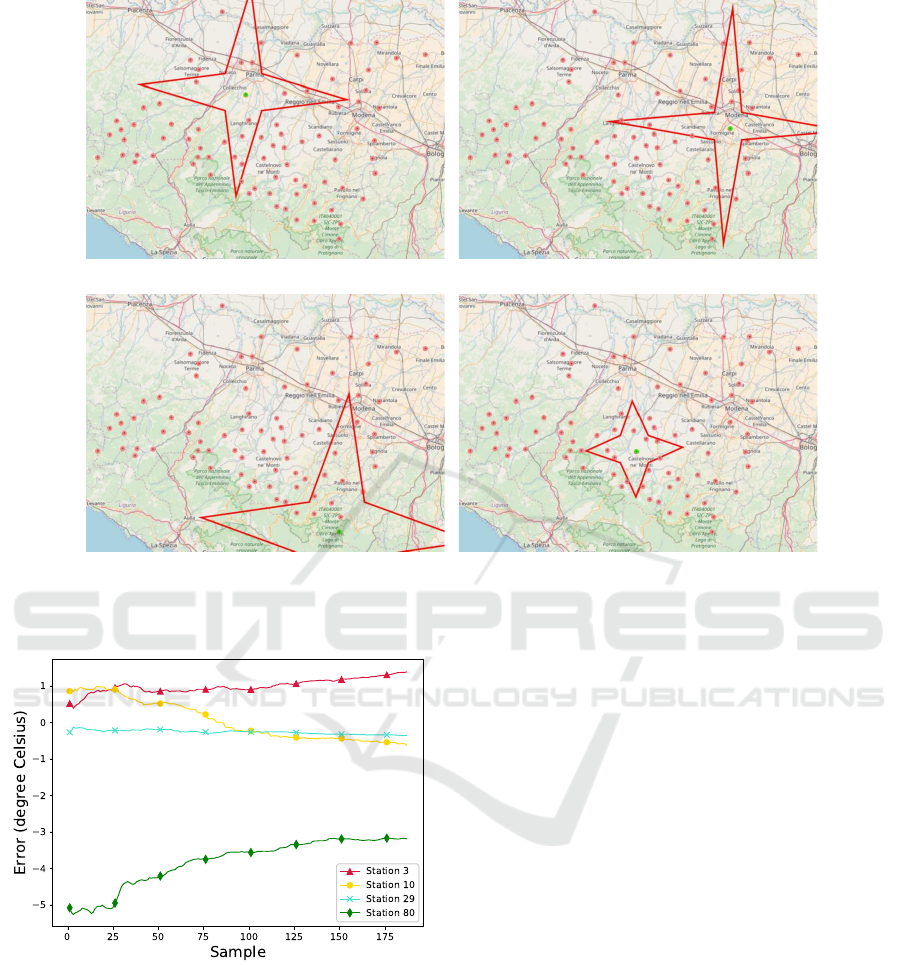
(a) (b)
(c) (d)
Figure 7: Resulting confidence zones of sensors 3 (a), 10 (b), 80 (c), 29 (d).
Figure 8: Error plot for stations 3, 10, 80 and 29.
REFERENCES
Bressan, L., Valentini, A., Paccagnella, T., Montani, A.,
Marsigli, C., and Tesini, M. (2017). Sensitivity of
sea-level forecasting to the horizontal resolution and
sea surface forcing for different configurations of an
oceanographic model of the Adriatic Sea. Advances in
Science and Research (European Meteorological So-
ciety), 14:77–84.
Cook, D. J., Youngblood, M., and Das, S. K. (2006). A
Multi-agent Approach to Controlling a Smart Envi-
ronment. In Augusto, J. C. and Nugent, C. D., edi-
tors, Designing Smart Homes: The Role of Artificial
Intelligence, pages 165–182. Springer.
Dameri, R. P. (2013). Searching for smart city definition:
a comprehensive proposal. In International Journal
of Computers & Technology, volume 11, pages 2544–
2551. Council for Innovative Research.
Frontczak, M. and Wargocki, P. (2011). Literature survey
on how different factors influence human comfort in
indoor environments. Building and Environment (El-
sevier), 46(4):922 – 937.
Georg
´
e, J.-P., Gleizes, M.-P., and Camps, V. (2011). Co-
operation. In Di Marzo Serugendo, G., Gleizes, M.-
P., and Karageorgos, A., editors, Self-organising Soft-
ware: From Natural to Artificial Adaptation, pages
193–226. Springer.
Ghahramani, A., Castro, G., Karvigh, S. A., and Becerik-
Gerber, B. (2018). Towards unsupervised learning of
thermal comfort using infrared thermography. Applied
Energy (Elsevier), 211:41–49.
Gleizes, M.-P., Boes, J., Lartigue, B., and Thi
´
ebolt, F.
(2018). neocampus: A demonstrator of connected,
innovative, intelligent and sustainable campus. In
De Pietro, G., Gallo, L., Howlett, R. J., and Jain,
L. C., editors, Intelligent Interactive Multimedia Sys-
tems and Services, pages 482–491. Springer.
Guastella, D. A. and Valenti, C. (2018). Estimating miss-
ing information by cluster analysis and normalized
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
222

convolution. In 2018 IEEE 4th International Forum
on Research and Technology for Society and Industry
(RTSI), Palermo, Italy.
Herkel, S., Knapp, U., and Pfafferott, J. (2008). Towards a
model of user behaviour regarding the manual control
of windows in office buildings. Building and Environ-
ment (Elsevier), 43(4):588–600.
Higdon, D. (1998). A process-convolution approach to
modelling temperatures in the North Atlantic Ocean.
Environmental and Ecological Statistics (Springer),
5(2):173–190.
Karnouskos, S. and Nass de Holanda, T. (2009). Simula-
tion of a smart grid city with software agents. In 2009
Third UKSim European Symposium on Computer
Modeling and Simulation, pages 424–429, Athens,
Greece.
Knutsson, H. and Westin, C.-F. (1993). Normalized and
differential convolution. In Proceedings of IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 515–523. IEEE.
Lemos, R. T. and Sans
´
o, B. (2006). Spatio-temporal vari-
ability of ocean temperature in the portugal current
system. J. Geophys. Res. (AGU), 111(C4):C04010.
Manville, C., Cochrane, G., Cave, J., Millard, J., Peder-
son, J. K., Thaarup, R. K., Liebe, A., Wissner, M.,
Massink, R., and Kotterink, B. (2014). Mapping
Smart Cities in the EU. Technical report.
Monmonier, M. (2010). Rhumb lines and map wars: a so-
cial history of the Mercator projection. University of
Chicago Press.
Okabe, A., Boots, B., Sugihara, K., and Chiu, S. N. (2000).
Spatial Tessellations: Concepts and Applications of
Voronoi Diagrams. Probability and Statistics. Wiley.
Olaru, A., Florea, A. M., and El Fallah Seghrouchni, A.
(2013). A context-aware multi-agent system as a mid-
dleware for ambient intelligence. Mobile Networks
and Applications (Springer), 18(3):429–443.
OpenStreetMap contributors (2017). Planet
dump retrieved from https://planet.osm.org.
https://www.openstreetmap.org.
Perles, A., Camilleri, G., and Gleizes, M.-P. (2017). Self-
adaptive distribution system state estimation. In Cri-
ado Pacheco, N., Carrascosa, C., Osman, N., and
Juli
´
an Inglada, V., editors, Multi-Agent Systems and
Agreement Technologies, pages 202–216. Springer.
Pham, T. Q., van Vliet, L. J., and Schutte, K. (2006). Robust
fusion of irregularly sampled data using adaptive nor-
malized convolution. EURASIP Journal on Advances
in Signal Processing (Springer), 2006(1):083268.
Piette, F., Caval, C., Dinont, C., Seghrouchni, A. E. F.,
and Tailliert, P. (2016). A multi-agent solution for
the deployment of distributed applications in ambi-
ent systems. In Baldoni, M., M
¨
uller, J. P., Nunes, I.,
and Zalila-Wenkstern, R., editors, Engineering Multi-
Agent Systems, pages 156–175. Springer, Singapore,
Singapore.
Pirttikangas, S., Tobe, Y., and Thepvilojanapong, N. (2010).
Smart environments for occupancy sensing and ser-
vices. In Nakashima, H., Aghajan, H., and Augusto,
J. C., editors, Handbook of Ambient Intelligence and
Smart Environments, pages 825–849. Springer.
Rafsanjani, M. K., Varzaneh, Z. A., and Chukanlo, N. E.
(2012). A survey of hierarchical clustering algo-
rithms. Journal of Mathematics and Computer Sci-
ence (ISRP), 5(3):229–240.
Roscia, M., Longo, M., and Lazaroiu, G. C. (2013). Smart
city by multi-agent systems. In 2013 International
Conference on Renewable Energy Research and Ap-
plications (ICRERA), pages 371–376, Madrid, Spain.
IEEE.
Verstaevel, N., Georg
´
e, J.-P., Bernon, C., and Gleizes, M.-P.
(2018). A self-organized learning model for anoma-
lies detection: Application to elderly people. In IEEE
International Conference on Self-Adaptive and Self-
Organizing Systems (SASO), pages 70–79, Trento,
Italy. IEEE.
Wong, L. T., Mui, K. W., and Cheung, C. T. (2014).
Bayesian thermal comfort model. Building and En-
vironment (Elsevier), 82:171–179.
Multi-agent Systems for Estimating Missing Information in Smart Cities
223
