
Real-time Hand Pose Tracking and Classification for Natural
Human-Robot Control
Bruno Lima
1
, Givanildo L. N. J
´
unior
1
, Lucas Amaral
1
, Thales Vieira
2
, Bruno Ferreira
1
and Tiago Vieira
1
1
Institute of Computing, Federal University of Alagoas, Macei
´
o, Brazil
2
Institute of Mathematics, Federal University of Alagoas, Macei
´
o, Brazil
Keywords:
Human-robot Interaction, Deep Learning, Convolutional Neural Networks, Skeleton Tracking.
Abstract:
We present a human-robot natural interaction approach based on teleoperation through body gestures. More
specifically, we propose an interface where the user can use his hand to intuitively control the position and
status (open/closed) of a robotic arm gripper. In this work, we employ a 6-DOF (six degrees-of-freedom)
industrial manipulator which mimics user movements in real-time, positioning the end effector as if the indi-
vidual was looking into a mirror, entailing a natural and intuitive interface. The controlling hand of the user is
tracked using body skeletons acquired from a Microsoft Kinect sensor, while a Convolutional Neural Network
recognizes whether the hand is opened or closed using depth data. The network was trained on hand images
collected from several individuals, in different orientations, resulting in a robust classifier that performs well
regardless of user location or orientation. There is no need for wearable devices, such as gloves or wrist-
bands. We present results of experiments that reveal high performance of the proposed approach to recognize
both the user hand position and its status (open/closed); and experiments to demonstrate the robustness and
applicability of the proposed approach to industrial tasks.
1 INTRODUCTION
Recent advances in artificial intelligence have allo-
wed the scientific community to research and develop
innovative natural human-machine interfaces. Emer-
ging deep learning methods have allowed people to
interact with virtual assistants, robotic pets and Na-
tural User Interfaces (NUI) through voice commands
and gestures (Schmidhuber, 2015).
Natural User Interfaces (NUI) are required to
be easy (highly learnable), ergonomic and non-
intrusive (LaViola Jr et al., 2017). In particular, clo-
thing requirements and counter-intuitive commands
are undesired, since it should feel comfortable for a
good experience. These requirements are even more
critical for applications in robotics control, where
accuracy is crucial and latency is not desirable.
Human body gestures have been adopted in the
last years for NUI as they potentially satisfy such re-
quirements (Miranda et al., 2012; LaViola Jr et al.,
2017). However, the correct identification and re-
presentation of body parts and movements in real-
time is still a topic of great interest from different
areas (Cheng et al., 2016).
We propose a user-friendly and intuitive Natural
User Interface (NUI), where a 6-Degrees-of-Freedom
(6-DOF) robot arm end-effector is controlled by mir-
roring the hand of the user. The user hand (position
and image) is extracted from a body skeleton model
obtained from a Microsoft Kinect. Such data is used
to control both: (1) the robot gripper position, after an
appropriate invariant encoding/decoding, and (2) its
state (open or closed) according to the respective user
hand state.
To classify hand poses, we use Convolutional
Neural Networks (CNNs) trained by small hand depth
images, which are cropped from the larger full body
depth image ensuring translational and scale invari-
ance, by centering on the projection of the hand posi-
tion with a depth-dependent radius. Thus, both skele-
ton and depth data are used by our hybrid approach,
tested in real-time with an industrial-grade 6-DOF ro-
bot arm. Potential real-world applications that could
affect user physical integrity, such as: (i) landslip ter-
rains; (ii) compromised buildings; (iii) cable and gas
tunnels; (iv) areas with explosives.
In summary, this paper has the following contri-
butions:
• We propose the use of an invariant representation
to mimic human moves to a robot arm in an intui-
tive fashion;
832
Lima, B., N. Júnior, G., Amaral, L., Vieira, T., Ferreira, B. and Vieira, T.
Real-time Hand Pose Tracking and Classification for Natural Human-Robot Control.
DOI: 10.5220/0007384608320839
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 832-839
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

• We collected a balanced dataset (publicly availa-
ble) composed by 160, 000 depth images of open
and closed hands from 20 different individuals;
• We present image processing algorithms to ex-
tract and pre-filter human hand depth images from
large depth images. Such algorithms are applied
to provide scale and background invariant images
to the CNN;
• We show that CNNs are robust to recognize hu-
man hand poses from small depth images, achie-
ving very high accuracy.
• We propose a filter based on temporal coherence
to improve per-frame classification performance;
• We show results of experiments performed to va-
lidate the method in real-world tasks.
2 RELATED WORK
Authors in (Xiao et al., 2014) used information from
the upper-body such as head, arm position and hand
posture to implement a Human-Robot Interaction
(HRI) system. Differently from our approach, which
does not require any wearable device, they used an
immersion glove (CyberGlove II
1
).
Kruse et al.(Kruse et al., 2015) used a Kinect sen-
sor to track and map movements of both human arms
to a robotic apparatus comprising a torso and two 7-
DOF (Degrees-of-Freedom) manipulators. The pur-
pose was to evaluate the system stability whilst sup-
porting big objects using a closed-loop force control.
Kalman filters were employed by Du et al. (Du
et al., 2014) on data from an Inertial Measurement
Unit (IMU) device, along with a Kinect sensor, to
determine translation and orientation of the human
hand. They propose a method to tackle the cumula-
tive error inherent to the inertial measuring unit. Our
system, in contrast, maps the absolute position of the
hand relative to the user’s torso, therefore invariant to
body translation/rotation.
Recently, deep learning models have shown out-
standing results for image classification, and some
works have been proposed to recognize hand poses
from images (Tompson et al., 2014; Yuan et al., 2017;
Sharp et al., 2015). Fine classification of subtle hand
poses is possible by constraining the acquisition of
hand images: the hand is near the sensor; and the
space of allowed body poses is very limited. In con-
trast, we face the challenge of recognizing hand po-
ses from varying body poses, hand orientations and
distances to the sensor. It is worth noting that hand
1
http://www.cyberglovesystems.com/
pose images acquired from variable distances contain
hands at different scales and levels of detail, which we
successfully handle in our approach.
3 METHODOLOGY
Our solution addresses two main challenges: locating,
tracking and mirroring the hand movements on the ro-
bot arm; and recognizing hand poses to send binary
commands to the robot gripper. Both in real-time. As
depicted in Fig. 1, we adopt a Kinect v1 (Microsoft,
2018) depth sensor to locate and capture depth ima-
ges of a user at 30fps. These images are used in both
training and recognition phases. Although more re-
cent depth sensors can provide even better features
for hand pose recognition, Kinect v1 was sufficient to
achieve high accuracy in this work.
To perform hand location and tracking, we pro-
pose the use of a parametric approach based on user
skeleton models (Shotton et al., 2011; OpenNI, 2018).
To provide an intuitive interface to the user, we em-
ploy a representation of the hand position that is in-
variant to global translations and rotations of the his
body. In addition, this representation can be em-
ployed to mirror movements in a robot arm.
The hand is located and cropped from the full
body depth image using the skeleton’s projection in
2d image space. The cropped image is then filte-
red before being stored into the dataset or used for
inference. The hand pose recognition is carried out
by a supervised learning approach: after collecting
a large training set composed of hand images (open
or closed), we train a Convolutional Neural Network
(CNN) to act as a binary classifier. In what follows,
we describe each step of the method in detail.
3.1 Depth Image Preprocessing
Depth sensors are capable of estimating their distance
(or depth) to visible objects in a scene. A depth image
is defined by a function f : U ⊂ R
2
→ R, where
z = f (x, y) represents the distance from the sensor to
the object that is projected at pixel (x, y). Using the
official Kinect SDK (Microsoft, 2018), we extract, in
real-time, a skeleton composed of relevant body joint
positions, given in 3d Cartesian coordinates, inclu-
ding the controlling hand.
Let p(t) ∈ R
3
be the controlling hand position gi-
ven by the sensor at frame t, and ˜p(t) = (x(t), y(t))
the projection of p(t) in the image space. To extract
the hand region R ⊂ U from the depth image domain,
we set the center pixel of R to ˜p and its dimensions
Real-time Hand Pose Tracking and Classification for Natural Human-Robot Control
833
CNN
Hand pose
Training set
Depth image
Skeleton extraction
Hand tracking
Hand region cropping
Segmented/binary image
pose buffer
Invariant
representation
Temporal filtering
command
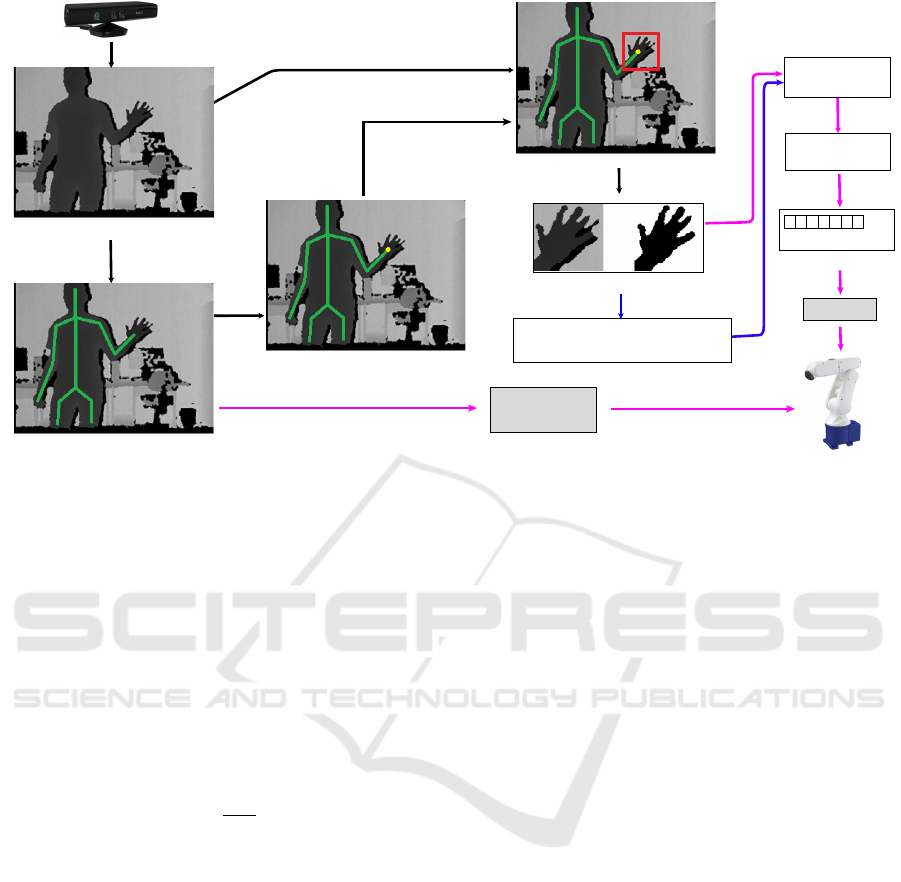
Figure 1: Method overview: a depth image is captured in real-time using a depth sensor (top-left); the skeleton is obtained
(bottom-left) and used to locate the hand region (top-right); the hand is then cropped using the position p(t) given by the
skeleton; segmented or binarized images are computed and stored in a hand pose training set, which is later used to train a
CNN (blue), or evaluated by a previously trained CNN that is capable of recognizing if the hand is opened or closed (pink).
CNN classifications are sequentially stored in a pose buffer for temporal coherence filtering. Commands sent to the robot are
highlighted in gray.
to 2L × 2L, where L is given in pixels. Since the dis-
tance from the user (and the controlling hand) to the
sensor may vary over time, the hand size (or scale)
in the image may also vary. Considering that depth
images given by the Kinect sensor are generated by
perspective projection, the hand size is inversely pro-
portional to its distance to the sensor. Thus, we let L
vary over time as a function of the hand distance, as
L(t) =
K
d(t)
,
where K is a proportionality constant and d(t) is the
distance from p(t) to the sensor in milimeters.
We empirically tuned K by analyzing several
depth images from distinct users performing various
poses. We searched for the smaller value of K whose
generated images covered the whole hand projected
area. By applying these criteria, we guarantee ima-
ges that are small but still representative for the fol-
lowing phase of learning and recognition of hand po-
ses. In this experiment, we found an optimum value
of K = 62.
Let f
0
: R ⊂ R
2
→ R be the cropped hand image.
This image may include, in addition to the hand, ot-
her background objects or even parts of the user body.
To remove such unwanted data, we experimented two
filtered representations extracted from f
0
for training
and recognition of hand poses: segmented and binari-
zed images. To extract the hand from the background,
we consider that the hand is the closest object to the
sensor and apply a depth thresholding filter, resulting
in the segmented image given by
s(x, y) =
(
f
0
(x, y), f
0
(x, y) ≤ D
min
+ T
0, f
0
(x, y) > D
min
+ T ,
where D
min
= min
R
( f
0
(x, y)), i.e. the depth of the clo-
sest hand pixel to the sensor; and T is a depth thres-
hold used to extract the hand.
Alternatively, we compute binarized images from
segmented images by
b(x, y) =
(
1, f
0
(x, y) ≤ D
min
+ T
0, f
0
(x, y) > D
min
+ T .
Both representations are experimented and compared.
3.2 Invariant Human-Robot Mimicking
In this section we focus on mapping the user body
movement to the robot movement by using a local
coordinate system that is invariant under rotations and
translations of the body skeleton. We are interested in
the relative position of the hand (which we consider to
be the right hand) relative to the body. We use the fol-
lowing joints: right shoulder ( j
rs
); left shoulder ( j
ls
);
shoulders center ( j
sc
); spine ( j
sp
); and right hand ( j
rh
)
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
834

(cf. Fig. 2). We compute the coordinates of j
rh
w.r.t a
local coordinate system centered at joint j
rs
.
The basis of the coordinate system must vary with
body movement. We consider that the torso plane is
the better reference for body movement, and compute
a vertical unitary vector ( ˆv
t
) and a horizontal unitary
vector, (
ˆ
h
t
) given by
ˆv
t
=
j
sc
− j
sp
k j
sc
− j
sp
k
,
ˆ
h
t
=
j
ls
− j
rs
k j
ls
− j
rs
k
.
The third vector of our basis is the normal vector of
the torso plane ( ˆn
t
), given by the normalized cross
product
ˆn
t
=
ˆ
h
t
× ˆv
t
k
ˆ
h
t
× ˆv
t
k
.
The position of the right hand is initially given by u =
−−−→
j
rs
j
rh
. Since users may have different arm lengths, we
normalize u using the sum of the lengths of the arm
and forearm vectors:
˜u =
j
rh
− j
rs
k j
re
− j
rs
k + k j
rh
− j
re
k
.
Then, we change the basis of vector ˜u to the ba-
sis
ˆn
t
,
ˆ
h
t
, ˆv
t
, obtaining the invariant coordinates
(u
1
, u
2
, u
3
). Finally, the goal position of the robot
gripper is given by
P
G
=
η ω
X
u
1
ˆ
X
0
η ω
Y
u
2
ˆ
Y
0
δ
z
+ ω
Z
u
3
ˆ
Z
0
, (1)
where;
•
ˆ
X
0
,
ˆ
Y
0
,
ˆ
Z
0
is the orthonormal basis of the robot
coordinate system;
• ω
X
, ω
Y
and ω
Z
are robot-dependent scale factors;
Figure 2: Example of mapping between body skeletons
(left) and robot (right) coordinate systems: the right shoul-
der joint j
rs
is mapped to the fixed point P
1
lying on the
vertical axis
ˆ
Z
0
of the robot coordinate system. The right
hand joint is then mapped to the goal point P
G
located at the
tip of the gripper. Note that when the user moves or rotates
w.r.t the scene keeping the same relative hand position to
the body, the robot remains stationary.
• δ
Z
is an offset in the vertical direction to regulate
the operation height;
• η ∈ {−1, 1} represents an operation mode, which
is +1 for direct operation, or −1 for mirror ope-
ration, in which case the axes on the horizontal
plane of the robot are inverted.
3.3 Convolutional Neural Networks for
Hand Pose Classification
To train our classifier, we collected a dataset compri-
sing labeled hand images from both segmented and
binarized representations. Then, we assessed which
one performed better for classification.
Training and Classification. At the training stage,
several examples of each hand class were feed as trai-
ning data into a Convolutional Neural Network, ge-
nerating a binary classification model. Then, in the
classification stage, a user performs any of the trai-
ned hand poses, his hand image representation (seg-
mented or binarized) is calculated and given as input
to the trained CNN. Finally, the classifier predicts, in
real-time, which class the image belongs to.
Architecture. The class of Convolutional Neural
Networks for image classification includes models
that: receive as input any kind of data structured as
n-dimensional images; perform convolutions on such
data in a few convolutional layers, possibly using
max-pooling and dropout; flatten the resulting fea-
ture maps into an uni-dimensional array before fee-
ding a few dense layers; and finally reach an out-
put layer with a softmax activation function. Several
hyper-parameters determine a unique network struc-
ture, such as the number of convolutional and dense
layers, the convolutional filter sizes, and the number
of units of each layer. To find the most appropriate
combination of hyper-parameters for hand pose clas-
sification, we performed a grid search, evaluating se-
veral combinations of values. Fig. 3 shows the best
network structure found in the experiments described
in Section 4.2.
All experimented networks receive as input a
single-channel image with fixed dimensions of 50 by
50 pixels. The input data is filtered by 1 or 2 convolu-
tional layers (C), where each layer may apply 3×3 or
5 × 5 filters (F). For each convolutional layer, we use
8, 16 or 32 filters per layer (S). After each convoluti-
onal layer, we include a max-pooling layer with 2× 2
receptive fields to downsample the feature maps.
The resulting features are then flattened into a uni-
dimensional array that is given as input to dense lay-
Real-time Hand Pose Tracking and Classification for Natural Human-Robot Control
835

Figure 3: Architecture of the best CNN found in the experiments of Section 4.
ers. We experimented the use of 1 or 2 dense layers
(U), with 80, 120 or 160 hidden units (N) each. In
all convolutional and dense layers, we use the recti-
fied linear (ReLU) as activation function. Finally, a
softmax dense layer with 2 neurons outputs the fi-
nal probability distribution. Note that, to generalize
these networks for the classification of n poses, one
can simply change the number of neurons of softmax
layer to n. In the next Section, we present the results
of the experiments, showing the best hyperparameters
combinations found.
3.4 Temporal Filtering
CNN robustness may be decreased due to exter-
nal factors such as: depth sensor noise; inaccurate
skeleton tracking; incompatible user poses, such as
keeping the hand occluded or near other objects in
the scene. However, a robot may drop and break an
object if, during a pick-and-place task, a closed hand
is incorrectly classified as open.
To improve robustness in such situations, we pro-
pose to take advantage of temporal coherence. We
consider that, in order to control a robot, the user must
keep the same command along a time interval of rea-
sonable duration. This contrasts with inaccurate hand
pose classifications, which rarely occurs, considering
that the CNN is robust. Thus, we employ a temporal
filter that only changes command if the CNN changes
its hand pose classification for at least Q consecutive
frames. We set Q = 15, which results in half a se-
cond delay. However, this parameter should be tuned
according to the nature of the application.
4 EXPERIMENTS
In this section we describe the collected dataset of
hand poses images, made publicly available
2
. Then,
we describe experiments to evaluate CNNs: we com-
pare the performance using binarized and segmented
2
http://www.im.ufal.br/professor/thales/ocdh/
image representations; we experiment several combi-
nations of hyper-parameters to identify robust CNN
configurations; and we evaluate the best CNN con-
figuration with temporal filtering in a regular robot
control task. Finally, to demonstrate the robustness
and feasibility of our proposed interface in real-time
robot control applications, we present results of expe-
riments with inexperienced users.
4.1 Open-closed Depth Hand Dataset
We collected a large and diversified hand pose image
dataset composed by 160,000 samples from 20 in-
dividuals (15 men and 5 women). Individuals per-
formed the predefined hand poses: open and closed
hand. From each subject, we collected depth images
of the whole body, with 640 × 480 resolution. To im-
prove diversity, we asked each individual to vary its
global body pose as much as possible, and captured
in environments with different backgrounds. From
the depth images, we extracted and stored the crop-
ped hand. It is worth mentioning that, as the distance
from the hand to the sensor is variable, the cropped
image resolution varies greatly. Consequently, we re-
sampled all cropped images to the input resolution of
the neural network before the training stage (the same
occurring for real-time classification).
4.2 CNN Hyper-parameters and Image
Representations Experiments
In this experiment, we simultaneously evaluate
both the proposed image representations and the
hyper-parameters combinations. We performed an
exhaustive grid search through the subset of the
hyper-parameter space described in Section 3.3, for
each of the proposed image representations individu-
ally. To evaluate the robustness of each configura-
tion, we applied cross-validation by considering 90%
of the dataset for training and 10% for testing.
Table 1 shows the 10 best CNNs found in this ex-
periment. The first relevant conclusion is that bina-
rized images achieved better results than segmented
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
836
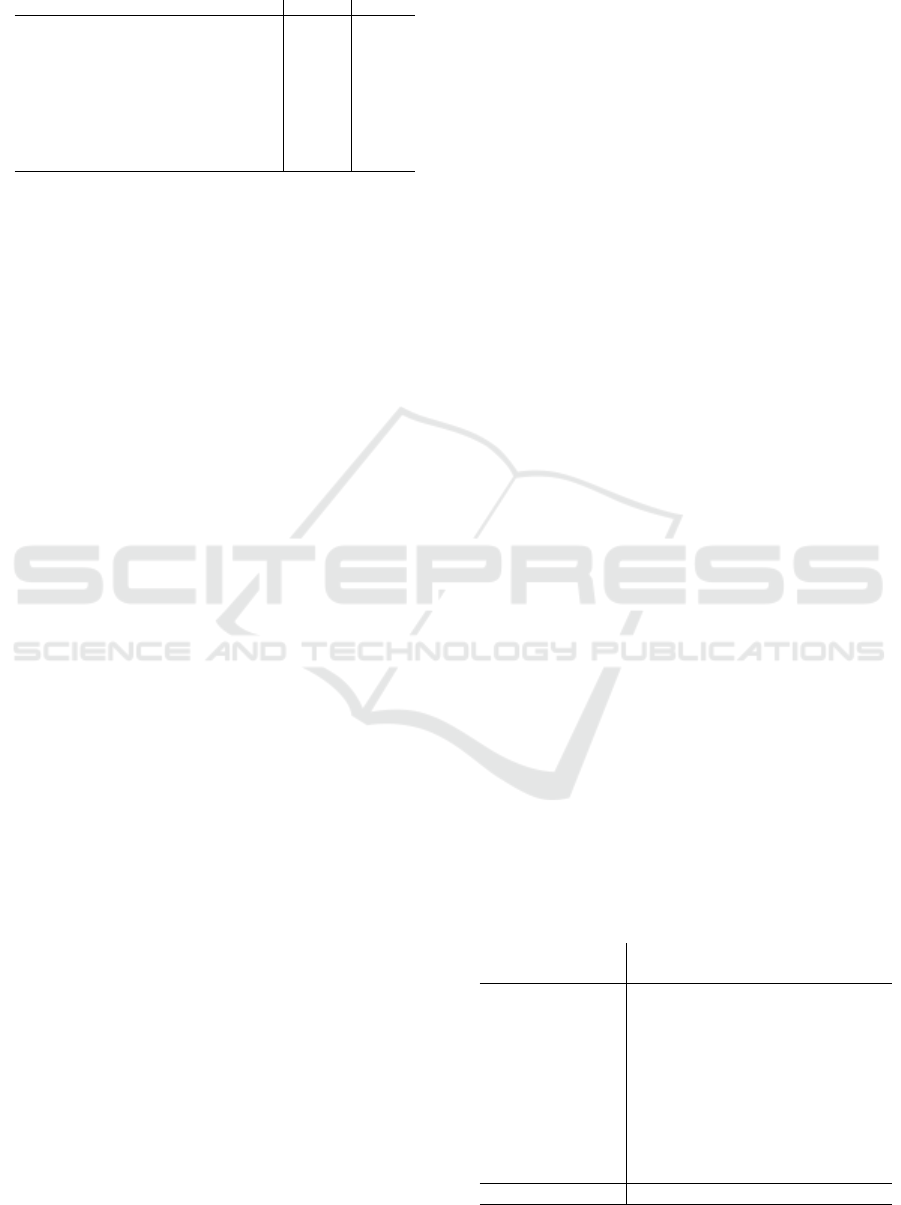
Table 1: Configuration and accuracy of the best-performing
CNN architectures.
image C F S U N accuracy weights
bin 2 (3, 5) 32 2 (160, 160) 97,64% 564,194
bin 2 (5, 5) 32 2 (120, 80) 97,58% 347,466
bin 2 (5, 5) 32 2 (160, 160) 97,49% 467,426
bin 2 (3, 3) 32 2 (160, 80) 96,78% 642,290
bin 2 (3, 5) 16 2 (160, 80) 96,75% 275,778
bin 2 (5, 5) 32 2 (160, 80) 96,66% 454,386
bin 2 (3, 5) 32 2 (120, 80) 96,51% 419,914
bin 2 (5, 3) 32 2 (80, 80) 96,01% 272,802
bin 2 (5, 3) 32 1 (160, 0) 95,80% 522,562
bin 2 (3, 5) 32 2 (160, 80) 95,39% 551,154
images, which do not appear among the best results.
This is more clear when we observe the histograms
shown in Fig. 4, that represent the accuracy distri-
bution of the experimented configurations for each
image representation separately. For segmented ima-
ges, accuracies range from 89% to 94%, while bi-
narized images accuracies range from 96% to 99%.
More importantly, we conclude that the best CNN ar-
chitectures are very accurate to detect hand poses in
all experimented body poses. This is a relevant result,
as the user is expected to perform binary commands
while simultaneously controlling the robot arm posi-
tion in many distinct configurations.
By analyzing the hyper-parameters of the best ar-
chitectures, we note that there is a prevalence of 2
convolutional layers with 32 filters per layer, and
a diversity of values for the other evaluated hyper-
parameters. The best architecture is depicted in Fig. 3.
However, it is worth observing that all configurations
in Table 1 achieved a similar accuracy (always above
98%). Thus, we suggest that a smaller number of trai-
nable weights may be a relevant criteria to choose an
architecture among the best ones. However, hyper-
parameter calibration was still relevant to achieve sig-
nificantly better accuracies, as revealed in Fig. 4.
4.3 CNN Evaluation for Robot
Interaction
To further evaluate the best CNN architecture, we per-
formed experiments simulating the usual pick-and-
place task. We collected 10 performances of an indi-
vidual picking an object and placing it in another lo-
cation. It is expected that the user first places its con-
trolling hand (open) over the object; closes his hand
to grasp the object; moves his (closed) hand to anot-
her location; and finally opens his hand to release the
object. Despite the simplicity of the task movements,
some poses are challenging for hand pose classifica-
tion, in particular when the user hand is pointing to-
wards the Kinect sensor. In such situations, images
from the hand poses are difficult to discriminate.
We evaluate and compare the robustness of the
CNN in each sequence when each frame is individu-
ally classified, and when temporal filtering is applied
(Section 3.4). We ignore frames from transitions be-
tween hand poses, since even a ground truth label is
ambiguous. We take into account a delay of 15 frames
to compare ground truth labels with labels classified
after temporal filtering, as this is expected. The eva-
luated sequences have an average of 204 frames.
The results shown in Table 2 reveal that temporal
filtering is indeed relevant to improve accuracy, achie-
ving an excellent mean of 98.65%, against 94.73%
when classification is performed in a per-frame basis.
In particular, per-frame classification only outperfor-
med the temporal filtering approach in sequence 5.
In that case, a single misclassified frame in the 7th
frame following a pose transition forced the command
transition to be delayed by 7 frames, as it requires 15
consecutive similar classifications to change the com-
mand. Consequently, this lead to 7 incorrect results.
However, we claim that this is not a critical issue, as
the consequence would be just a delay in grasping or
releasing an object. Is is also worth noting the worst
result (sequence 7). In that case, the user performed
challenging poses, as the ones shown in Fig. 5, in
which case the hand was closed, but with the thumb
straight. We believe that the CNN classification could
be improved in these cases by providing additional
training examples. Finally, we conclude that the pro-
posed CNN approach is reliable for real-world appli-
cations.
4.4 User Experiments with a Robot
Arm
We validate our method using a 6-DOF industrial-
grade robotic arm of model VP-6242, from Denso
Table 2: Comparison between straightforward per-frame
classification and temporal filtering based classification: the
best trained CNN is employed to classify all frames of 10
sequences simulating a pick-and-place task. Accuracy is
defined as the ratio between correctly classified frames and
the total number of frames of each sequence.
Sequence
Accuracy
Per-frame Temporal filter
1 95.97% 100%
2 97.34% 100%
3 92.63% 100%
4 98.09% 99.04%
5 99.56% 96.92%
6 99.09% 100%
7 81.89% 91.35%
8 95.93% 100%
9 92.39% 99.21%
10 94.43% 100%
Mean ± Std. Dev. 94.73%±5.14% 98.65%±2.73%
Real-time Hand Pose Tracking and Classification for Natural Human-Robot Control
837
(a) Histogram of accuracies of segmented images. (b) Histogram of accuracies of binarized images.
Figure 4: Histograms of accuracies of the experimented architectures. Horizontal axes represent accuracy intervals, and
vertical axes represent the number of architectures achieving the corresponding accuracies.
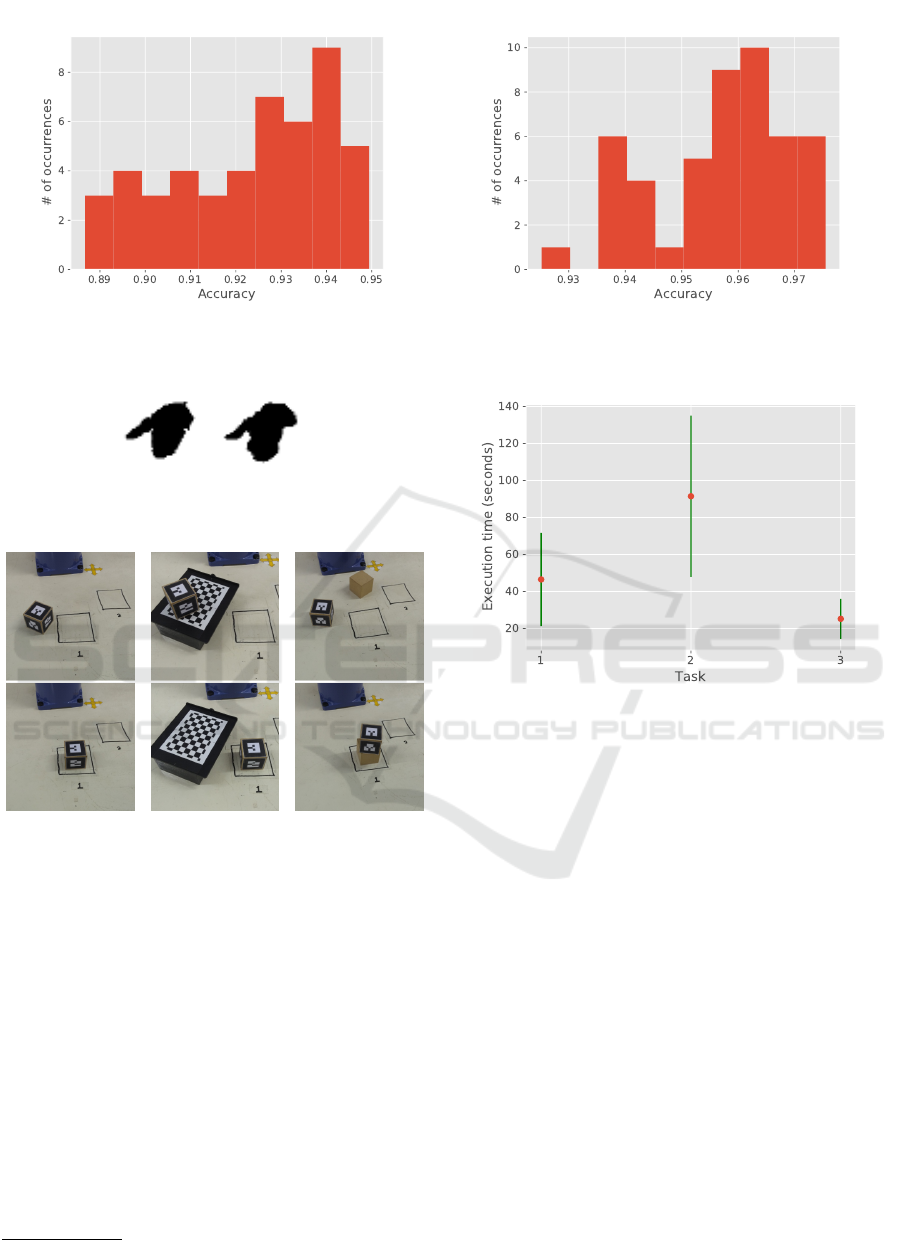
Figure 5: Challenging instances of hand poses: the user
closed the hand with the thumb straight.
(a) Task 1. (b) Task 2. (c) Task 3.
Figure 6: Pick-and-place experiments with the robotic arm.
Tasks 1, 2 and 3 are depicted in (a), (b) and (c), respecti-
vely. Top-rows represent initial states whereas bottom-rows
illustrate the final configuration to be achieved.
Robotics
3
. It’s end-effector is a gripper from Robo-
tiq
4
(2F-85). The goal of the Human-Robot Interface
is teleoperation, allowing indirect manipulation of ob-
jects by positioning the gripper according to the user
hand position. Additionally, the gripper mimics the
user hand state (open or closed).
We define three simple experiments (cf. Fig. 6)
to evaluate the effectiveness of the interface: moving
a box from one specific position to another (task 1);
moving box 1 from a higher platform to a lower posi-
tion at the table, then moving box 2 from the table to
the higher platform (task 2); and pilling 2 boxes (on
3
http://densorobotics.com/products/vp-g-series
4
https://robotiq.com/products/adaptive-grippers
Figure 7: Execution times for the three pick-and-place ex-
periments with the robotic arm.
top of each other) on a desired position (task 3).
To validate the method, we invited 10 inexperien-
ced users (9 men and 1 woman in their mid-twenties)
to perform typical robot control tasks, always in the
same order of execution of the tasks, i.e. firstly task 1,
then task 2, then task 3. None of them had prior expe-
rience in controlling a robot using body movements.
We measured the execution time that each subject
needed to perform each of the three tasks, as revea-
led in Table 3. Average and standard deviation are
shown in the last row and in Fig. 7. With a few ex-
ceptions, most tasks were successfully accomplished
by the individuals. Results also suggest that users im-
prove their performance for more complicated tasks
after executing some initial experiments. More spe-
cifically, Fig. 7 reveals that, on average, task 3 was
executed quicker than task 1, although task 3 is cle-
arly harder than task 1.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
838

Table 3: Experimental results with inexperienced individu-
als. When a box is dropped, we count the execution as a
failure.
Subject
Execution time (seconds)
Task 1 Task 2 Task 3
1 28 93 16
2 20 51 23
3 81 81 11
4 56 fail 22
5 82 180 40
6 44 67 20
7 18 64 fail
8 81 124 28
9 30 131 47
10 25 32 20
Mean ± Std. Dev. 47±27 91±46 25±11
5 CONCLUSION AND FUTURE
WORK
We presented a real-time human-robot natural inte-
raction approach suitable for the teleoperation of ro-
botic arms. We collected a dataset of hand images
(binary and segmented) and assessed different model
hyper-parameters, searching for a classifier that best
suited the problem. Then, we proposed a model for
position control, using only hand movement, which
was invariant to the user position and orientation. We
performed proof-of-concept experiments with indivi-
duals with no previous training and measured elapsed
times during the execution of pick-and-place tasks.
The best hand pose classifier presented excellent re-
cognition rates, which were improved by our propo-
sed temporal filter, and allowed an intuitive user ex-
perience.
As future work, we plan to expand the number of
hand state classes. Different control modes can also
be analyzed, depending on the task context, such as
using two hands and their relative positions. We also
aim to investigate recurrent neural networks, since
the input data is inherently sequential. Alternative
human-robot movement mappings may also be topic
of research, including user-customizable interfaces.
REFERENCES
Cheng, H., Yang, L., and Liu, Z. (2016). Survey on 3d hand
gesture recognition. IEEE Trans. Circuits Syst. Video
Techn., 26(9):1659–1673.
Du, G., Zhang, P., and Li, D. (2014). Human–Manipulator
Interface Based on Multisensory Process via Kalman
Filters. IEEE Transactions on Industrial Electronics,
61(10):5411–5418.
Kruse, D., Wen, J. T., and Radke, R. J. (2015). A sensor-
based dual-arm tele-robotic system. IEEE Trans.
Autom. Sci. Eng., 12(1):4–18.
LaViola Jr, J. J., Kruijff, E., McMahan, R. P., Bowman, D.,
and Poupyrev, I. P. (2017). 3D user interfaces: theory
and practice. Addison-Wesley Professional.
Microsoft (2018). Kinect - windows app deve-
lopment. https://developer.microsoft.com/en-
us/windows/kinect.
Miranda, L., Vieira, T., Mart
´
ınez, D., Lewiner, T., Vieira,
A. W., and Campos, M. F. M. (2012). Real-time ge-
sture recognition from depth data through key poses
learning and decision forests. In Sibgrapi, pages 268–
275.
OpenNI (2018). Openni - open-source sdk for 3d sensors.
http://openni.ru.
Schmidhuber, J. (2015). Deep learning in neural networks:
An overview. Neural networks, 61:85–117.
Sharp, T., Keskin, C., Robertson, D., Taylor, J., Shotton,
J., Kim, D., Rhemann, C., Leichter, I., Vinnikov, A.,
Wei, Y., Freedman, D., Kohli, P., Krupka, E., Fitzgib-
bon, A., and Izadi, S. (2015). Accurate, robust, and
flexible real-time hand tracking. In Proceedings of the
33rd Annual ACM Conference on Human Factors in
Computing Systems, CHI ’15, pages 3633–3642, New
York, NY, USA. ACM.
Shotton, J., Fitzgibbon, A. W., Cook, M., Sharp, T., Fi-
nocchio, M., Moore, R., Kipman, A., and Blake, A.
(2011). Real-time human pose recognition in parts
from single depth images. In CVPR, pages 1297–
1304.
Tompson, J., Stein, M., Lecun, Y., and Perlin, K. (2014).
Real-Time Continuous Pose Recovery of Human
Hands Using Convolutional Networks. ACM Trans.
Graph., 33(5):169:1—-169:10.
Xiao, Y., Zhang, Z., Beck, A., Yuan, J., and Thalmann, D.
(2014). Human robot interaction by understanding up-
per body gestures. Presence, 23(2):133–154.
Yuan, S., Ye, Q., Stenger, B., Jain, S., and Kim, T. (2017).
BigHand2.2M Benchmark: Hand Pose Dataset and
State of the Art Analysis. In 2017 IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 2605–2613.
Real-time Hand Pose Tracking and Classification for Natural Human-Robot Control
839
