
Traffic Sign Classification using Hybrid HOG-SURF Features and
Convolutional Neural Networks
Rishabh Madan
∗
, Deepank Agrawal
∗
, Shreyas Kowshik
∗
, Harsh Maheshwari
∗
, Siddhant Agarwal
∗
and Debashish Chakravarty
Autonomous Ground Vehicle Team, Indian Institute of Technology, Kharagpur, India
Keywords:
Convolutional Neural Network, Feature Descriptors, Traffic Sign Classification, Histogram of Oriented
Gradient, Speeded Up Robust Features.
Abstract:
Traffic signs play an important role in safety of drivers and regulation of traffic. Traffic sign classification is
thus an important problem to solve for the advent of autonomous vehicles. There have been several works
that focus on traffic sign classification using various machine learning techniques. While works involving
the use of convolutional neural networks with RGB images have shown remarkable results, they require a
large amount of training time, and some of these models occupy a huge chunk of memory. Earlier works
like HOG-SVM make use of local feature descriptors for classification problem but at the expense of reduced
performance. This paper explores the use of hybrid features by combining HOG features and SURF with CNN
classifier for traffic sign classification. We propose a unique branching based CNN classifier which achieves
an accuracy of 98.48% on GTSRB test set using just 1.5M trainable parameters.
1 INTRODUCTION
Traffic sign classification holds an essential place in
visually guided driving assistance and autonomous
driving systems and several other traffic-related utili-
ties. Traffic signs are utilised as a method of warning
and guiding drivers, helping to regulate the flow of
traffic among vehicles, pedestrians, and others who
travel the streets, highways and other roadways. The
development of traffic sign classification is dedicated
to reducing the number of fatalities and the severity of
road accidents and is an important and active research
area. In general, traffic signs have unique and distinc-
tive features like simple shape priors in the form of
circles and triangles combined with uniform colour-
ing patterns, which makes them easily recognizable
and thus also a restricted classification task. Regard-
less, classifying these signs without any human super-
vision is still a challenging task considering the dif-
ferent kinds of problems like occlusions, disoriented
poles, lighting changes and poor quality signs that are
encountered during real-world execution.
For many years, local features descriptors have
dominated all domains of computer vision. The con-
siderable progress that has been visible in classifica-
∗
These authors have contributed equally.
tion and detection is mostly due to them. Histogram
of Gradients (HOG) after its introduction, outper-
formed all the previous methods for human detection
(Dalal and Triggs, 2005) by a considerable margin. It
has since then been used to solve a variety of clas-
sification and detection problems. (Schmitt and Mc-
Coy, 2011) used Speeded Up Robust Features (SURF)
(Bay et al., 2006) feature descriptors along with Sup-
port Vector Machine (SVM) classifier for classifica-
tion on a subset of the CalTech-101 database (Fei-Fei
et al., 2004).
In recent years, convolutional neural networks
(CNN) have become pervasive in classification tasks
after AlexNet (Krizhevsky et al., 2012) which popu-
larized deep convolutional neural networks for classi-
fication. The general trend has been to make deeper
and more complicated networks to extract high-level
features in order to achieve higher accuracy (Szegedy
et al., 2014),(He et al., 2015). Many approaches in-
volving deep learning have achieved exemplary per-
formance in traditional road environments. However,
an increase in depth of network leads to exponen-
tial increase in the number of parameters. A deep
convolutional neural network involving Spatial Trans-
former networks (Garc
´
ıa et al., 2018) achieved high-
est accuracy on the German Traffic Sign Recognition
Benchmark (GTSRB) (Stallkamp et al., 2012) dataset
Madan, R., Agrawal, D., Kowshik, S., Maheshwari, H., Agarwal, S. and Chakravarty, D.
Traffic Sign Classification using Hybrid HOG-SURF Features and Convolutional Neural Networks.
DOI: 10.5220/0007392506130620
In Proceedings of the 8th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2019), pages 613-620
ISBN: 978-989-758-351-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
613

but used 14M model parameters. These advances to
improve accuracy are making networks inefficient in
terms of memory use and inference speed. In the real
world, traffic sign classification might be carried out
on a memory constrained platform but would still re-
quire highly accurate prediction.
In this work, we propose the use of hybrid fea-
ture descriptors along with a CNN based classifier for
traffic sign classification thereby providing a compu-
tationally efficient method with a lesser number of
model parameters and improved training time. The
proposed hybrid feature descriptors comprise of HOG
feature descriptors and Bag of Words (BoW) variant
of SURF feature descriptors. HOG descriptors tend
to capture the global features of the object and are
lighting invariant, thus beneficial in the case of traffic
signs, due to the diverse shapes and high-level geo-
metric priors for different signs. But HOG descrip-
tors highly vary with change in object orientation,
which could become a problem when these signs are
viewed from multiple viewpoints. On the other hand,
SURF descriptors are rotation invariant, but when us-
ing a BoW representation, the spatial and geometric
relationship information between descriptors is lost.
This motivates the use of a combination of HOG de-
scriptors with SURF BoW descriptors. The presented
approach leverages the use of these hand-crafted de-
scriptors by using a CNN to learn a better represen-
tation for finer feature extraction and observe per-
formance comparable to recent deep CNN architec-
tures using RGB images for classification. The use
of this combination of descriptors to classify traffic
signs using a basic CNN classifier has been demon-
strated. The purpose of using CNN, in comparison to
SVM or other learning-based classifiers in this partic-
ular case is to learn a better feature representation of
this combination of two different descriptors and thus
make use of relatively high-dimensional features for
classification. We extend the experiments by using a
branched CNN architecture to reduce the number of
trainable model parameters by a large factor and also
observe incremental improvements in terms of classi-
fication accuracy.
Contributions. The main contributions of this pa-
per comprise the use of a hybrid combination of HOG
and SURF feature descriptors as an input to the CNN
classifier for accurate classification of traffic signs.
We perform an extensive comparative study regard-
ing the combined use of these two very different fea-
ture descriptors, and how they support each other to
improve the prediction results with minimal training
parameters by a substantial margin.
2 RELATED WORK
HOG descriptors with Support Vector Machine
(SVM) classifier have been used for classification pur-
poses earlier (Blauth et al., ). Even though these fea-
tures show better performance in characterizing ob-
ject shape and appearance, there is a drawback of this
approach that it is restricted to binary classification as
the SVM determines the optimal hyperplane, separat-
ing two classes in the dataset. The use of SVM in
a multinomial classification problem thus becomes a
case of one-versus-all, in which the positive class is
the class with the highest score whereas the rest rep-
resent the negative class. In other words, we need
to train N-SVMs for an N-class classifier, whereas an
N-class classifier neural network can be trained in one
go. Also, the neural network can generalize in a bet-
ter manner as it acts like one whole system whereas
SVMs are isolated systems.
SURF descriptors with CNN have been previously
used by (Elmoogy et al., 2018) for solving the prob-
lem of indoor localization. CNNs are capable of ex-
tracting high-level features but require high dimen-
sional optimization procedure due to which the train-
ing time is significantly long. On the other hand,
image descriptors obtain features from the image
through deterministic means which have much higher
speed than CNN. The disadvantage of the descriptor
is that the output feature size is generally large com-
pared to CNN. In this approach, they combined both
the feature descriptor and the CNN, by first using an
image descriptor to extract features from the image
and then using the CNN to reduce the dimension of
the feature. SURF features alone are not able to rep-
resent the geometric property of the image. This com-
plication is dealt with using combined HOG features
with SURF.
(Abedin et al., 2016) have taken a similar ap-
proach of using hybrid features for traffic sign clas-
sification. They have used SURF and HOG feature
descriptors with Artificial Neural Network (ANN) for
classification but have not shown their methodology
regarding how they are combining both descriptors.
They do not provide any valid reasons for the use of
this combination and do not explain why using indi-
vidual HOG, or SURF descriptors would not work.
Also, they have tested their approach for classifying
just 4 different traffic signs on a very small dataset
which makes their approach unreliable in case of large
and complex datasets. In contrast, we establish proper
reasoning and show detailed experiments on 43 dif-
ferent traffic signs, concerning the use of the hybrid
feature. Moreover, a CNN is used instead of a Multi-
layer Perceptron (MLP). CNN works particularly well
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
614

on data having a spatial relationship and is thus ideal
for the task of traffic sign classification.
3 METHOD
In this paper, a method involving the use of multiple
feature descriptors with CNN for image classification
is introduced. This method is applied to the problem
of traffic sign classification. The procedure begins
by first generating the HOG descriptor for the entire
dataset followed by extraction of SURF that have high
saliency and lastly feeding features to a convolutional
neural network for prediction.
3.1 Feature Extraction with HOG
HOG is a dense feature extraction method. It detects
complex shapes of structures by the distribution of in-
tensity gradients or edge directions. HOG generates
pixel-wise histograms of gradient directions and con-
catenates them to get the descriptor.
HOG features are based on magnitude distribu-
tions and gradient angles. Due to this, they have a nat-
ural invariance to changes in lighting conditions and
colour variation. These make them robust in visual
data. It involves first computing the gradients of all
pixels. For an image I, gradient estimation filters as
H
x
= [−1, 0, 1] and H
y
= [−1, 0, 1]
T
. Let G
x
and G
y
be the gradient matrices generated by
G
x
= I ∗ H
x
and G
y
= I ∗ H
y
(1)
where * is the convolution. The gradient value at each
pixel can be calculated as
g(i, j) =
q
(G
x
(i, j)
2
+ G
y
(i, j)
2
) (2)
and the dominant gradient direction at each pixel can
be estimated by
θ(i, j) = tan
−1
G
y
(i, j)
G
x
(i, j)
!
(3)
This is followed by creating cell histograms. Each
point in a cell casts a weighted vote for the histogram
channel. These votes are based on the gradient val-
ues computed earlier. This orientation based channel
is distributed over 0 to 180
◦
. The cells are grouped
into spatially connected larger blocks and normalized
locally providing an invariance in changes in illumi-
nation and contrast. These normalized cell histograms
are concatenated to form the HOG feature vector.
Figure 1: The above figure shows the image in column (a)
and their corresponding SURF and HOG features in column
(b) and column (c).
3.2 Feature Extraction with SURF
SURF is an interest point detector and descriptor. It
is scale and rotation invariant and thus is more reli-
able for practical purposes since camera feed mostly
provides tilted and scaled traffic signs.
To calculate the orientation of a point, SURF uses
wavelet responses in horizontal and vertical directions
for a neighbourhood of size 6. The sum of all re-
sponses within a sliding orientation window of angle
60
◦
is calculated. This gives us the dominant orienta-
tion. The detector is based on the determinant of the
Hessian matrix.
Given a point x = (x, y) in an image I, the Hessian
matrix H (x, σ) in x at scale σ is defined as follows
H (x, σ) =
L
xx
(x, σ) L
xy
(x, σ)
L
xy
(x, σ) L
yy
(x, σ)
(4)
where L
xx
(x, σ) is the convolution of the 2
nd
order
derivative of Gaussian with image I in point x and
same for L
xy
(x, σ) and L
yy
(x, σ).
SURF uses box filters as an approximation to
Laplacian of Gaussian(LoG) for computational ad-
vantages. The descriptor, on the other hand, describes
a distribution of Haar-wavelet responses within the
interest point neighbourhood. SURF is sensitive to
lighting conditions and image-distortions thus pro-
ducing variable distributions of feature vectors across
the dataset. To ensure a fixed dimensionality of the
SURF feature vectors, descriptors were clusteresd us-
ing K-Means algorithm.
Traffic signs comprise of simple geometric pat-
terns. Using only SURF BoW descriptors for clas-
sification will not work as SURF BoW does not store
Traffic Sign Classification using Hybrid HOG-SURF Features and Convolutional Neural Networks
615
the information related to geometric patterns. HOG
features, on the other hand, identify these simple ge-
ometric patterns very well. But there is one potential
problem with using only HOG features. HOG fea-
tures are highly invariant to changes in lighting condi-
tions but get hugely affected by orientation changes of
the sign and do not detect local features. In real world,
the images of traffic sign come from different view-
points and may also be slightly distorted. So, HOG
alone cannot accurately classify traffic signs. For this
purpose, SURF BoW descriptors are used, which are
rotation and orientation invariant and capture the local
features. HOG detects the basic geometry of the sign
while SURF BoW descriptors complement HOG by
making it more robust to changes in orientation and
capturing local features.
Algorithm 1: High saliency SURF feature extraction.
1: procedure SURF GENERATE(image, num clusters)
2: H ← 0
3: while True do
4: SURF(H )
5: m = f (image)
6: if num f eature
x
< ε
min
then
7: skip the image
8: if num f eature
x
> ε
max
then
9: H ← H + α
10: else
11: break
12: SURF(H )
13: m = f (image)
14: KMEANS(x, num clusters)
15: . Cluster m along x axis
16: return cluster centers
Where H represents Hessian Threshold for SURF feature.
α is step size with which H is increased. ε
min
and ε
max
represent the minimum and maximum threshold values of
number of feature along x-axis, between which loops break
and clustering is done.
3.3 Branched Pipeline
Initially, a generic CNN architecture is used as a clas-
sifier. This classifier was directly fed HOG features
appended with SURF. While it achieves good results
on the GTSRB test set, it has a large number of train-
able parameters and takes a lot of time for training. To
solve this problem, a unique branched CNN architec-
ture is proposed. This model uses HOG features and
SURF as input to two different branches that consist
of convolutional blocks similar to the generic CNN.
The embeddings obtained from these two branches
are concatenated and further passed through fully
connected layers. This reduces the model parame-
ters, thus reducing computational cost. Additionally,
improvement is also observed in the accuracy on the
test set. This can be attributed to the fact that differ-
ent convolutional filters are used for the two different
kinds of feature descriptors.
For a detailed analysis of the results of the descriptors,
refer to the Analysis Section 5.
4 EXPERIMENTS
4.1 Dataset
German Traffic Sign Recognition Benchmark (GT-
SRB) dataset (Stallkamp et al., 2011) has been used
to perform all the experiments. It consists of 39,029
training images spread across 43 classes. The distri-
bution of classes is highly skewed with around 200 in
one up to 2000 in another class. The dataset has been
created by extracting image frames from 1-second
video sequences. A single sequence of 30 images usu-
ally contains images of the same traffic sign with in-
creased size. Thus it is important to employ a proper
strategy to create a meaningful training dataset. The
technique used by (Sermanet and LeCun, 2011) is
used to tackle the above issue.
To bring in uniformity, all classes are augmented
by applying a random brightness, random rotation and
random distortion to the image and those images are
flipped which are invariant to horizontal, vertical and
180
◦
flips. This is done for all the classes. This cre-
ates a dataset of over 130k images where data dis-
tribution across different classes is still skewed. To
tackle this problem, further augmentation is done in
selected classes with less than 1000 images by apply-
ing a random translation to them. The number of aug-
mented images of other classes was reduced to around
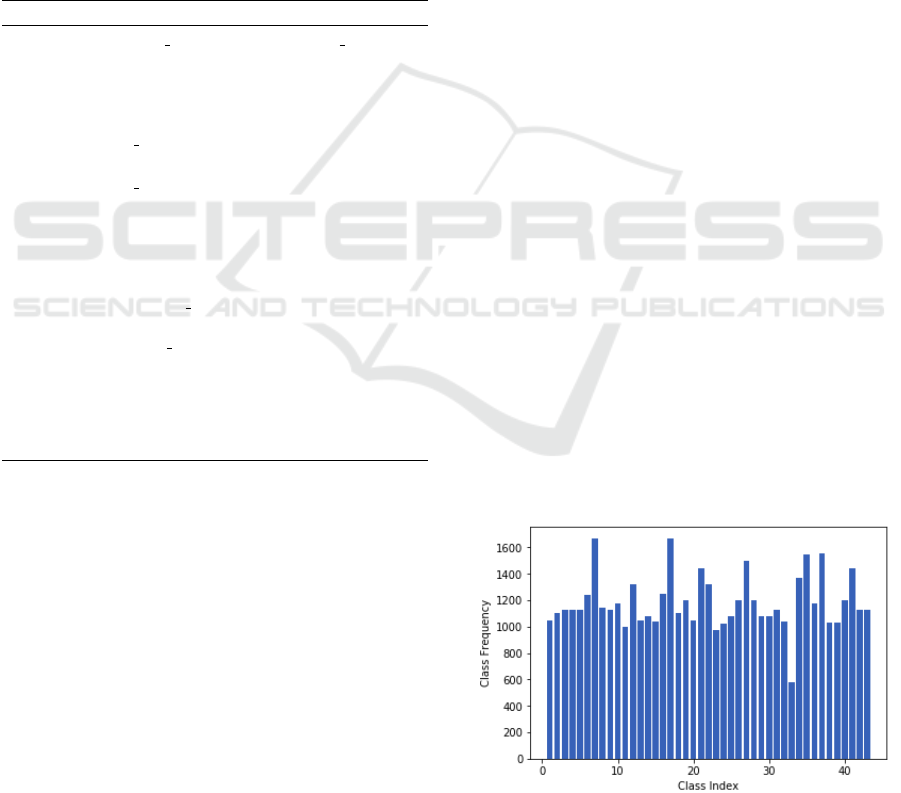
1200. This creates a comparatively uniform distribu-
tion (Figure 2) after applying HOG and SURF to the
images with 53,238 images in the dataset.
Figure 2: No. of training images of each class.
The HOG and SURF vectors are computed on each
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
616
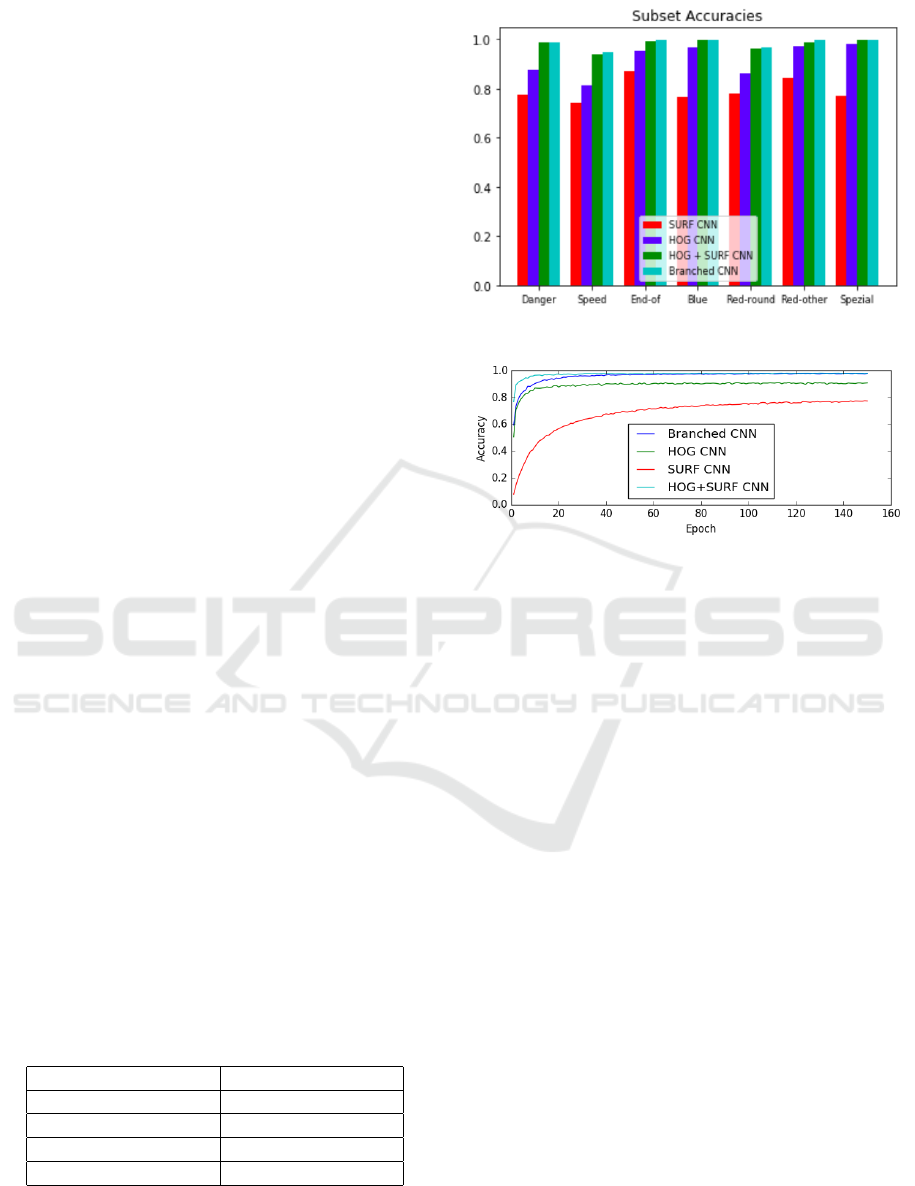
image (refer to Appendix for function parameter val-
ues). Each SURF vector in its 64-dimensional space
is clustered into 8 clusters using KMeans. This gives
us a 1x1764 sized HOG-vector. and 1x512 sized
SURF-vector.
4.2 Network Architectures
We broadly describe the architectures used for per-
forming all the experiments. For complete implemen-
tation details, refer to the Appendix 6.
4.2.1 Basic CNN Architecture
Figure 6 [in Appendix 6] shows the preliminary CNN
architecture that is used as a classifier along with ex-
tracted features as the input. The network comprises
of two convolutional blocks, where each block con-
sists of a batch normalization layer, ReLU activation
and max pooling layer. The embedding after passing
the input features through them is flattened and fed to
fully connected layers, and finally predicted probabil-
ities for all 43 classes are returned in the final layer.
4.2.2 Branched CNN Architecture
The basic CNN model suffers from the problem
of a large number of model parameters. To im-
prove its performance on computationally limited re-
sources and reduce the model parameters a branched
CNN (Figure 7) architecture is used, where the in-
put HOG and SURF are separately fed into two dif-
ferent branches, each consisting of two convolutional
blocks similar to the ones used in the basic architec-
ture. The respective embedding received from these
two branches are flattened, concatenated and passed
through fully connected layers to output the indi-
vidual probabilities for each class. The HOG conv-
branch is fed input HOG features of shape 7x252, and
the SURF-branch is fed input of 8x64. This method
of branching allows us to apply convolutions on the
two different type of feature maps separately. As can
be seen in Table 1, the number of model parameters is
reduced by 6x when using the branched CNN model.
Table 1: Comparison of number of model parameters.
Model Architecture No. of Parameters
Basic CNN 8,543,467
Branched CNN 1,583,947
3-Conv-No-STN 7,303,883
3-Conv-3-STN 14,629,801
Figure 3: Comparision of subset accuracies.
Figure 4: Comparison of test accuracy for the experiments.
5 RESULTS
To validate the use of multiple feature descriptors
with a CNN based architecture, the Basic CNN
architecture is used. Upon experimenting with
a branched CNN architecture, better accuracy is
observed. over the basic architecture. Figure 4 shows
the test accuracies of different models during train-
ing. Table 3 shows the accuracy obtained on the test
dataset. Figure 3 compares the subset accuracies for
different experimental models. The different subsets
consist of “Danger” signs, “Speed” signs, “End-of”
signs, “Blue” signs, “Red round” signs, “Red other”
signs, “Spezial” signs as defined in the GTSRB
dataset (Stallkamp et al., 2011). The branched CNN
architecture with multiple features outperforms the
HOG-SVM based approach. The model performance
is compared with (Garc
´
ıa et al., 2018) which shows
state of the art results on GTSRB dataset. Their base
model is defined as 3-Conv-No-STN, i.e. CNN with-
out spatial transformer networks (STN) and their best
model as 3-Conv-3-STN, i.e. CNN with three STNs.
It is visible from Table 1 and Table 3 that even though
state of the art method achieves a slightly better
accuracy, due to large number of trainable parame-
ters it is heavily computation intensive during train
and test time when compared to the proposed method.
Traffic Sign Classification using Hybrid HOG-SURF Features and Convolutional Neural Networks
617

Table 2: Analysis of False Positive count (FP) for some high FP struck classes. Third Column is the class that is predicted
with maximum FP count. The class indices correspond to the GTSRB dataset.
Class Index Total FP Class Most Confused With Corresponding FP
HOG HOG + SURF HOG HOG HOG + SURF
Pedestrians Possible 40 5 Danger Point 18 0
Road narrows on the right 72 1 Danger Point 45 0
End of (truck) 45 2 End of (car) 44 1
Table 3: Test set accuracy for different classifiers and in-
puts.
Classifier Input Data Accuracy(%)
Basic CNN HOG 91.09
Basic CNN SURF 77.41
SVM HOG 96.93
Basic CNN HOG + SURF 98.07
Branched
CNN
HOG + SURF 98.48
3-Conv-No-
STN
RGB Image 98.81
3-Conv-3-
STN
RGB Image 99.49
Using HOG features with the branched model yields
an accuracy close to 90%. After checking the model
outputs on classes having low test accuracy, it is ob-
served that the model confuses it with traffic signs
having a similar shape but does not distinguish well
enough between the drawing placed inside the shape.
This validates the theory that HOG features lack in-
formation about local features. Experiments are also
performed by just feeding the SURF to the basic
model and a poor accuracy of 77.41% is observed on
test set. Using both the HOG and SURF with the
branched CNN model outperforms all the baselines
using feature descriptor as input and achieves compa-
rable accuracy with respect to state of the art method.
Analysis. Refer to Table 2 for the following analy-
sis. It corresponds to classes represented by images
in Figure 5. With reference to this figure, it is evident
that HOG features tend to capture the overall shape
of an object very well, leaving apart the intricate de-
tails embedded in the shapes. This property of HOG
features causes it to confuse the images in the left col-
umn with the images in the right column as evident in
Table 2. SURF, on the other hand, describes local-
ized key-points embedded in the shapes. Upon using
HOG and SURF together, SURF entirely learned the
unique features of the ”danger point” sign (Figure 5)
and brought down the total FP from 40 to 5. Similar
improvements were observed in case of ”Road Nar-
rows on the right” (row 2, Figure 5). SURF learned to
distinguish between the two different “End of” signs
Figure 5: Left - Classes with maximum false positives with
only HOG features (Ground Truth Images). Right - Pre-
dicted class with only HOG features.
shown in Figure 5, by bringing down the FP count
from 44 to just 1. As can be seen, the two classes are
very similar in appearance and only a few unique key
points can differentiate between them, which SURF
captured successfully.
6 CONCLUSION
We proposed the method of concurrently using the
HOG and SURF of an image with a CNN based ar-
chitecture for the classification of traffic signs in the
GTSRB traffic sign dataset. The proposed pipeline
using the basic architecture achieved an accuracy of
98.075%. The performance of the approach is fur-
ther enhanced by using a branched CNN architec-
ture achieving an accuracy of 98.48% on the test set.
The advantages of using two different feature descrip-
tors, HOG and SURF together, are examined over
previous works that either use a RGB image or the
above-mentioned features individually. The experi-
ments show that using these pre-computed hybrid fea-
tures along with CNN achieves slightly lower perfor-
mance to the state of the art method but at the gain of
much lesser number of parameters, hence leading to
reduced computational resource usage by manifolds.
In future work, we intend to focus on using the pro-
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
618

posed technique of traffic sign classification with the
existing region proposal networks (RPN) to perform
efficient real-time detection of traffic signs. We also
intend to fine tune this method for classifying Indian
traffic signs.
REFERENCES
Abedin, M. Z., Dhar, P., and Deb, K. (2016). Traffic sign
recognition using hybrid features descriptor and ar-
tificial neural network classifier. In 2016 19th In-
ternational Conference on Computer and Information
Technology (ICCIT), pages 457–462.
Bay, H., Tuytelaars, T., and Van Gool, L. (2006). Surf:
Speeded up robust features. In Leonardis, A., Bischof,
H., and Pinz, A., editors, Computer Vision – ECCV
2006, pages 404–417, Berlin, Heidelberg. Springer
Berlin Heidelberg.
Blauth, M., Kraft, E., Hirschenberger, F., and B
¨
ohm, M.
Large-scale traffic sign recognition based on local fea-
tures and color segmentation.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In Computer Vision and
Pattern Recognition, 2005. CVPR 2005. IEEE Com-
puter Society Conference on, volume 1, pages 886–
893. IEEE.
Elmoogy, A. M., Dong, X., and Lu, T. (2018). Cnn : a
descriptor enhanced convolutional neural network.
Fei-Fei, L., Fergus, R., and Perona, P. (2004). Learning gen-
erative visual models from few training examples: An
incremental bayesian approach tested on 101 object
categories. In 2004 Conference on Computer Vision
and Pattern Recognition Workshop, pages 178–178.
Garc
´
ıa,
´
A. A.,
´
Alvarez, J. A., and Soria-Morillo, L. M.
(2018). Deep neural network for traffic sign recogni-
tion systems: An analysis of spatial transformers and
stochastic optimisation methods. Neural networks :
the official journal of the International Neural Net-
work Society, 99:158–165.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep
residual learning for image recognition. CoRR,
abs/1512.03385.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In Advances in neural information process-
ing systems, pages 1097–1105.
Schmitt, D. and McCoy, N. (2011). Object classification
and localization using surf descriptors.
Sermanet, P. and LeCun, Y. (2011). Traffic sign recogni-
tion with multi-scale convolutional networks. In Neu-
ral Networks (IJCNN), The 2011 International Joint
Conference on, pages 2809–2813. IEEE.
Stallkamp, J., Schlipsing, M., Salmen, J., and Igel, C.
(2011). The german traffic sign recognition bench-
mark: a multi-class classification competition. In Neu-
ral Networks (IJCNN), The 2011 International Joint
Conference on, pages 1453–1460. IEEE.
Stallkamp, J., Schlipsing, M., Salmen, J., and Igel, C.
(2012). Man vs. computer: Benchmarking machine
learning algorithms for traffic sign recognition. Neu-
ral Networks, (0):–.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S. E.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2014). Going deeper with convolutions.
CoRR, abs/1409.4842.
APPENDIX
HOG features and SURF are computed using the
OpenCV library. The parameters used during HOG
computation are window size = (32,32), block size =
(8,8), block stride = (4,4), cell size = (4,4), number of
bins = 9. All experiments were performed using Ten-
sorflow. Dropout was used in all convolutional layers
with a probability of 0.6. Adam Optimizer, with an
initial learning rate of 1e-4 and default parameters,
was used.
Basic Architecture
The basic architecture was implemented entirely in
Tensorflow. With reference to Figure 6, Conv C K S
refers to a convolution layer with ’C’ output channels,
’KxK’ kernel size and an ’SxS’ strided convolution.
All Pool layers are Max-Pool layers with a kernel of
2x2 and stride of 2x2. This reduces the input size by a
factor of 2 at each stage. A ReLU activation is applied
after each block. We implement Batch Normalization
after each convolutional block with the default scale
and shifting parameters in tensorflow. Batch Normal-
ization is not applied to fully connected layers. The
output of the network is the Softmax activation prob-
abilities over the 43 classes of the GTSRB dataset.
The loss function used is as follows:-
L(y, y
0
) = −
∑
y
0
log(y) (5)
where y are the labels for classification and y’ are
the predictions made (the logits). This represents the
cross-entropy loss for multiple classes.
Branched CNN Architecture
The Branched Architecture was implemented in a
similar fashion to the Basic Architecture with similar
default parameters. Batch Normalization was applied
only after each convolutional block and not on any
fully connected layer.
Traffic Sign Classification using Hybrid HOG-SURF Features and Convolutional Neural Networks
619
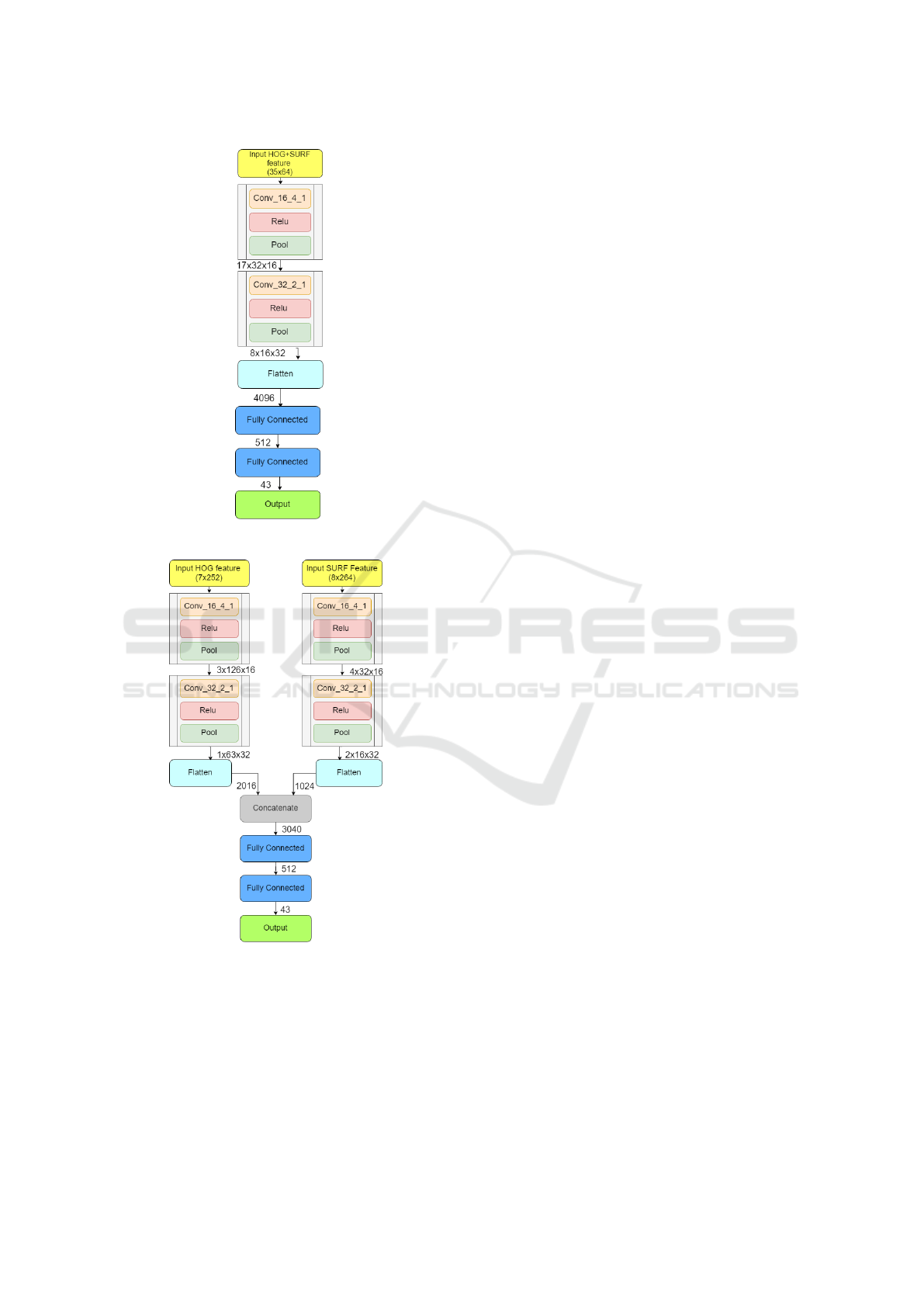
Figure 6: Basic CNN Architecture.
Figure 7: Branched CNN Architecture.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
620
