
CollabNet - Collaborative Deep Learning Network
Mois
´
es Laurence de Freitas Lima Junior
1
, Will Ribamar Mendes Almeida
2
and Areolino de Almeida Neto
3
1
Department of Computing, Federal Institute of Tocantins (IFTO), Village Santa Teresa - km 06, Araguatins-TO, Brazil
2
Department of Computing, CEUMA University (UNICEUMA), Rua Josu
´
e Montello - 1, S
˜
ao Luis-MA, Brazil
3
MecaNET group, Federal University of Maranhao (UFMA), Av. dos Portugueses - 1966, Sao Luis-MA, Brazil
Keywords:
Deep Learning, Deep FeedForward, Deep Stacked Autoencoder.
Abstract:
The goal is an improvement on learning of deep neural networks. This improvement is here called the Col-
labNet network, which consists of a new method of insertion of new layers hidden in deep feedforward neural
networks, changing the traditional way of stacking autoencoders. The new form of insertion is considered
collaborative and seeks to improve the training against approaches based on stacked autoencoders. In this new
approach, the addition of a new layer is carried out in a coordinated and gradual way, keeping under the control
of the designer the influence of this new layer in training and no longer in a random and stochastic way as
in the traditional stacking. The collaboration proposed in this work consists of making the learning of newly
inserted layer continuing the learning obtained from previous layers, without prejudice to the global learning
of the network. In this way, the freshly added layer collaborates with the previous layers and the set works in a
way more aligned to the learning. CollabNet has been tested in the Wisconsin Breast Cancer Dataset database,
obtaining a satisfactory and promising result.
1 INTRODUCTION
The use of machine learning techniques is becoming
more frequent in the most varied tasks of everyday
life, and the growth of this area of knowledge con-
tinues at a fast pace. This growth is due to many fac-
tors, including the growing volume and variety of data
available, computational processing and data storage,
both increasingly cheaper. Thus, it is possible to cite
some examples of its applicability, such as the filter-
ing of content in social networks, recommendations
of sites, identification of objects present in images and
videos, transcription of voice in text, diagnosis of dis-
eases, etc.
Although the studies of machine learning tech-
niques began in the 1960s, it was only by means of
the use of deep learning techniques that this area of
knowledge started to present similar performance to
humans in complex problems, and some cases even
surpassed. The performance of deep algorithms can
be attested in several machine learning competitions
scattered around the world (Bengio et al., 2006)
Deep learning brought significant advances in
solving problems that until they were a barrier, even
for the best machine learning techniques known to
the scientific community. The deep learning tech-
nique is very efficient in the discovery of complex
structures in high dimensional data and is therefore
applicable to many fields of science, business, and
government (Lecun et al., 2015). This technique has
produced promising results for various tasks of nat-
ural language processing, feeling analysis, classifica-
tion, chatbot and language translation (Schmidhuber,
2014).
Most deep network architectures use stochastic
methods in initializing and adding new hidden layers
(Huang et al., 2016; Arjovsky et al., 2017; Goodfel-
low et al., 2014). The use of stochastic methods slows
learning because as a result of their randomness and
the natural tendency is that there is a disturbance in er-
ror. In an attempt to optimize learning by increasing
the depth of a neural network at runtime, minimally
disturbing the network error emerged at CollabNet.
In this way, the present work is to present a proposal
of insertion of new layers in a feedforward type neu-
ral network, so that you work collaboratively without
learning of the neural network as a whole.
The organization of this work is given as fol-
lows, the first section introduced the research theme.
The following chapter presents the main concepts of
deep learning, describing a set of works that pro-
pose new architectures of deep learning networks and
Lima Junior, M., Almeida, W. and Neto, A.
CollabNet - Collaborative Deep Learning Network.
DOI: 10.5220/0007395106850692
In Proceedings of the 11th International Conference on Agents and Artificial Intelligence (ICAART 2019), pages 685-692
ISBN: 978-989-758-350-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
685

training methods. The third section presents the pro-
posed methodology, explaining details of the struc-
ture and training of the CollabNet network, as well
as the change made in the sigmoid activation func-
tion, called sigmoid
A
. Section 4 presents the expe-
riences of CollabNet in the task of pattern recogni-
tion with the base Wisconsin Breast Cancer Dataset
(Wolberg et al., 2011). From these tests, the results
are presented and attest the efficiency of the method,
demonstrating that it has a promising future in the re-
solution of classification problems and pattern recog-
nition. The last section shows the observed conclu-
sions as well as the contributions obtained.
2 RELATED WORK
The algorithms that implement deep learning gener-
ally seek the identification of abstractions from the
data, starting from the identification of the lowest lev-
els and arriving at the highest levels, so that, through
the composition of the lower level characteristics, the
higher-level features and, consequently, new repre-
sentations (Larochelle et al., 2009). In this way, the
learning of characteristics in multiple levels of ab-
straction allows the computational system to learn
complex functions of mapping the data from input
to output, independently of features created manu-
ally. That is, this technique can be considered as a
way to automate the generation of characteristics that
are more representative of a given pattern recogni-
tion problem (Bengio, 2009; Lecun et al., 2015). In
this way, the number of algorithms, strategies, and ar-
chitectures implementing this technique is increasing.
This section presents some approaches that somehow
brought innovation to the area and served as a con-
ceptual basis for the present work.
A strategy for building deep networks based on
stacking layers of denoising autoencoders is pre-
sented in (Vincent and Larochelle, 2010), where au-
toencoders are trained individually to restore the cor-
rupted versions of their entries. This approach is a
variant of traditional self-encryption, where an ele-
ment called denoising autoencoder added, which is
trained to reconstruct a repaired entry of a corrupted
version of the x vector using a stochastic input map-
ping ˜x ∼ q
D
( ˜x|x).
In (Netanyahu, 2016), a new activation function
is proposed, which implements nonlinear orthogonal
mappings based on permutations using deep convo-
lutional autoencoders. The OPLU, thus named, was
tested in feedforward and recurrent networks, per-
forming similarly to other already-recognized activa-
tion functions, such as Tanh and ReLU. The OPLU
activation function has a fundamental characteristic to
preserve the norm of the backpropagation gradients.
3 METHODOLOGY
The present work focuses on the implementation of a
new strategy of insertion of hidden layers in a deep
feedforward network, to avoid instabilities in the er-
ror of exit, during training, from a new layer inserted
by traditional methods. The integration between the
new layers must be carefully observed so that the net-
work output error always converges. This continuous
convergence must be such that a new layer always im-
proves the result of the previous layers and with this
ends up still having a collaboration of the new layer.
Hence, this work presents an efficient way to increase
the depth of the network, by adding layers collabora-
tively in the execution time.
3.1 Materials
For training and testing of the network, the database
was divided into two parts. A part containing 75 % of
the database was used for training and the remainder
for testing. At the end of the tests, the cross-validation
of the data was promoted to verify the independence
of the result concerning the data. After several tests
with different configurations, better performance was
obtained in the selected base, with the use of 16 neu-
rons in all the hidden layers, a rate of learning to vary
between η = 10
−3
a η = 10
−5
. The variable c started
at 0 with a jump ranging from 10
−2
e 10
−3
every 20
times, ∆D varying at the same rate as c, the activation
function sigmoide
A
in the intermediate layers and the
linear function in the output layer.
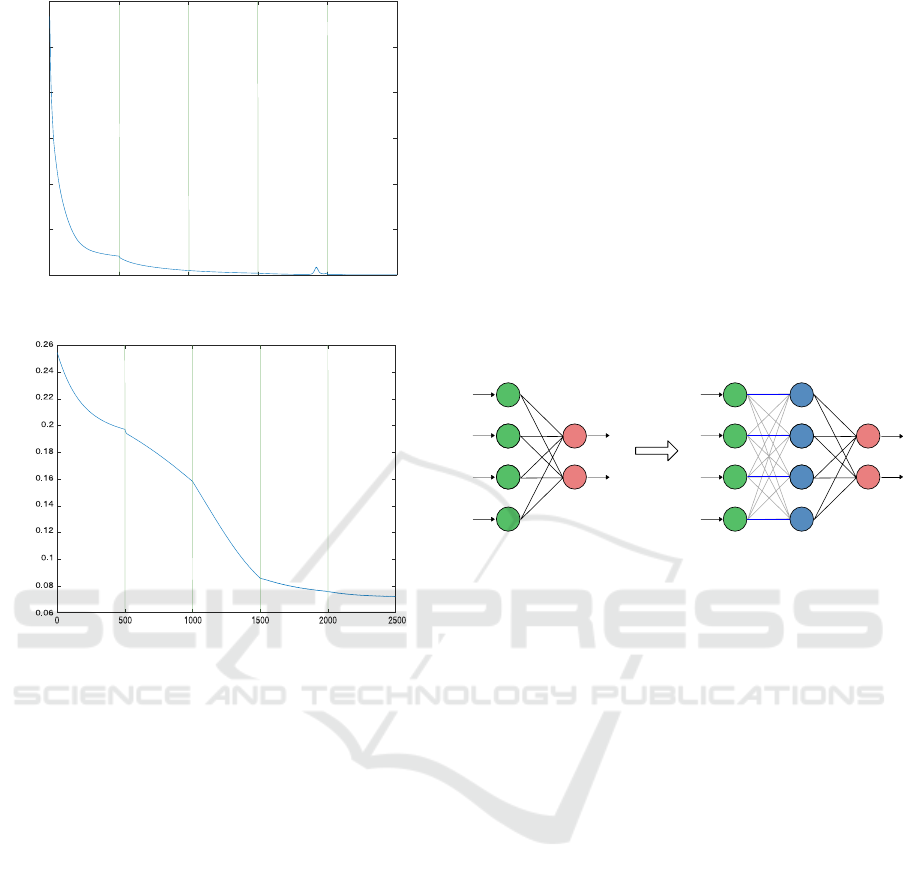
With this configuration above, CollabNet obtained
a decay of the Mean Square Error (MSE) more effi-
ciently, with the decay of the permanent error, when
compared to the MLP training without the method
proposed by this work, as shown in Figure 1. The
hit rate for this setup was 95.7%.
3.2 Method
This approach assumes that each new layer must be-
gin its training precisely from the point at which the
immediately preceding layer has stopped. In other
words, it is sought to decrease the error gradually,
even when another layer is inserted into the neural
network, as shown in Figure 2. Thus, this scheme
can provide increasing learning, avoiding traps of lo-
cal minimums or plateaus.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
686
MSE
Epoch
12
10
8
6
4
2
0
0 500 1000 1500 2000 2500
Figure 1: Decay of the MSE.
Epoch
MSE
Figure 2: Expected error behavior.
However, to succeed in this task, the integration
of the new layer must be properly performed, other-
wise the further layer may negatively affect the learn-
ing already achieved, causing a worsening in learning.
Therefore, the main idea of this proposal is to develop
a technique to incorporate the learning of the previous
layers in the training of the new layer, in order to pro-
vide knowledge about the learning already obtained
to a new layer.
The CollabNet structure is given according to
equation f (x) = w · f
(3)
(w · f
(2)
(w · f
(1)
(x))). In this
case, w represents the training weights of the layers,
f
(1)
is the activation function of the neurons of the
first layer, f
(2)
of the second one and f
(3)
represents
the function of the third layer. The last layer is called
the output layer, and the network depth is given by the
total length of the layered chain.
3.2.1 Training
The training strategy proposed in this work starts
analogously to the traditional method of an MLP net-
work, with only one hidden layer and the use of
the backpropagation algorithm (Glorot and Bengio,
2010). After this first stage of training, when the net-
work exit error does not decrease further, then a new
layer can be inserted into the training network. This
inclusion must necessarily be done one by one, since
after the insertion of a new layer it is necessary to
carry out several procedures, commented below, aim-
ing at the harmonious inclusion of the new hidden lay-
ers.
The proposed approach presents an innovative
way of inserting new layers. This method is intended
to ensure that new layers do not corrupt the network
exit error. For this, it is necessary that the output of
each neuron of the newly inserted layer is the same
value of the output of the corresponding neuron of the
previous layer considering all the input data (Figure
3).
Output Layer
Layer A Layer B
Output layer
Layer A
Figure 3: Insertion of a new layer.
In this proposal, the initialization of weights be-
tween layers A and B is performed randomly. This
initialization disturbs the network output error after
the inclusion of a new layer. Therefore, in order to
provide output of layer B equal to output of layer A,
that is, the output error is not disturbed at the insertion
of a new layer, it is necessary to provide treatment at
the output of the layer A. Otherwise there is no guar-
antee that the output of layer B is the same of layer
A, since the output of layer B will be altered by the
newly initialized weights and by the activation func-
tion of layer B neurons.
This work proposes to perform the data treatment
between layers A and B to compensate for the change
given by the newly created weights. This treatment
consists of a kind of mask, here called D, as shown
in Figure 4. The mask D modifies the values that ar-
rive in the neurons of layer B, allowing that the output
of each neuron is exactly equal to the output of the
corresponding neuron in layer A.
The D mask ensures that each neuron in the new
layer receives only the influence of its corresponding
neuron from the previous layer. The operation of the
mask D is shown in Figure 4 and occurs as follows:
the connections represented by a colored line indicate
that the mask does not change the value, that is, the
neurons of the new layer B) receive exactly the output
value of the corresponding neuron in the anterior layer
(A). The connections represented by a gray line have
CollabNet - Collaborative Deep Learning Network
687
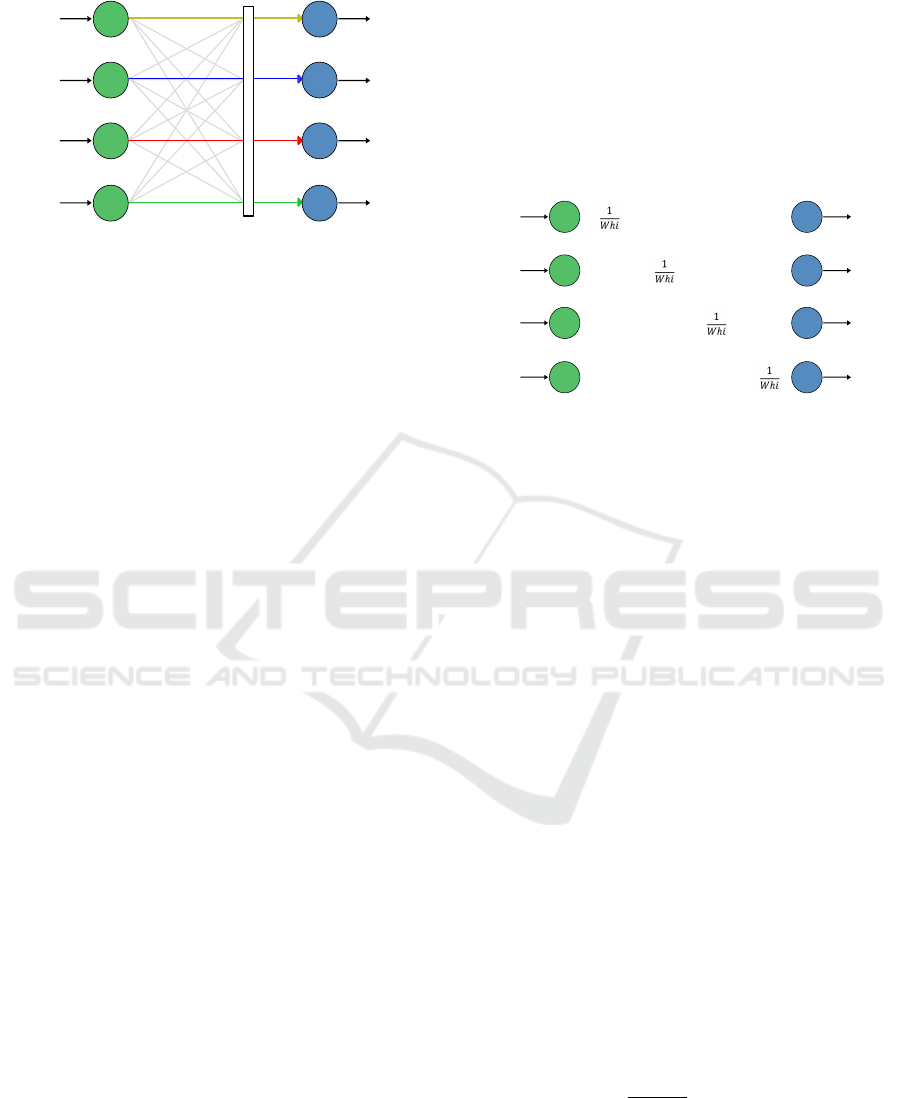
Layer A
Layer B
Figure 4: Mask D between an old layer and the newly in-
serted layer.
their value overridden by the mask, so the value re-
ceived from the adjacent neurons is null. In this way,
the input value of each neuron of the new layer is the
same value that leaves the neuron in layer A.
For the mask D to perform the filter as mentioned
earlier, there must be multiplication by the inverse of
the corresponding weight value, such that the value
effectively processed by the layer B neuron is exactly
the output value of the corresponding neuron of the
layer A. In this way, it is guaranteed that the training
of layer B will start exactly from the point where the
previous layer stopped. It is also ensured that new
insertions do not hinder the learning of the network
as a whole.
After the inclusion of layer B, it is then taken to
calculate the input of this layer, given by equation 1,
where W
h
i are the weights between layers A and B,
D is the mask and Y is the output of layer A. The .∗
operator means an element-by-element multiplication
and not a standard matrix multiplication.
net
h
= (W
hi
. ∗ D) ∗Y (1)
In addition to the mask D, another modification
proposed in this work consists in altering the activa-
tion function of the B layer neurons to, instead of sig-
moid, to be the identity function. In this way, what
enters the neurons of layer B becomes the output of
this layer. Thus, one has the guarantee that the output
of each neuron from layer B is exactly the output of
the corresponding neuron in layer A.
However, the innovations proposed in this work,
as they are, do not allow the new layer to acquire an
apprenticeship since the output of layer B will always
equal the output of layer A; therefore, there is no re-
duction of the network output error by modification
of the new weights created. Thus, after insertion of
layer B, when the network training algorithm is ex-
ecuted, both the mask D and the activation function
of the neurons of layer B must change, to allow an
influence on the output from the Web.
However, abrupt withdrawal of the D mask and/or
the swapping of the sigmoid identity-activation func-
tion promote, on the one hand, the possibility of learn-
ing acquisition by layer B, but on the other hand, pro-
vide a sudden rise in error network. Thus, it is nec-
essary that there is a smooth and gradual transition
of mask removal D and the conversion of the identity
function to sigmoid.
ΔD
ΔD
ΔD
ΔD
ΔD
ΔD
ΔD
ΔD ΔD
ΔD
ΔD
ΔD
Layer A
Layer B
Figure 5: Change mask values D through ∆D.
The transition expressed in the previous paragraph
must occur during the execution of the training. Thus,
after a certain number of iterations (in this work it
was around 300), the weights between layers A and
B should promote the reduction of the output error
of the network, without prejudice to the decay of the
error promoted by the previous layers. This transfor-
mation is performed through a ∆D ranging from 0to1,
with speed defined via parameterization of the initial-
ization of the new layer, as shown in Figure 5. In
this way, it is intended to ensure that the disturbance
caused by the insertion of a new layer hidden in the
network is the smallest possible.
While all the elements of the mask D varied uni-
formly, the elements of its main diagonal would vary
according to the random weights generated at the ini-
tialization of the new layer depending on the initial
values of those weights, the values of the main diago-
nal converge faster to one.
For this approach a sigmoid activation function
was used; however, its use is only performed when
the network is only a hidden layer. Thus, from the in-
clusion of the second hidden layer, it was necessary to
make a small adaptation in the sigmoid function, with
the intention of precisely controlling the influence of
the new layer in learning the network. This adaptation
is presented in Eq. 2.
φ
A
(n) =
1
1 + e
−n
∗ c + n ∗ (1 − c) (2)
where φ
A
(n) is the output of the neuron with the
sigmoide
A
, c is the weighting factor of the activation
function and n is the weighted sum of all the synaptic
inputs of the neurons.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
688

The adaptation performed in Eq. 2 was imple-
mented by the need for the activation function to be
the identity function at the beginning of training of
a new layer. Throughout the training of this layer,
the activation function must be gradually converted
into the sigmoid function, which is promoted by the
c variable, so that after a certain amount of iterations,
the activation function returns to be only the sigmoid
function traditional. Thus, the variable c acts by
weighting the identity and sigmoid functions, trans-
forming an activation function of identity at the be-
ginning of the training of the new layer, to a sigmoid
function at the end.
The inclusion of the c variable in the sigmoid ac-
tivation function (φ) gives the designer the power to
control the influence of a layer in learning, in which
the closer to 1 is the value of the variable c, the greater
its influence and the closer to 0, the less will be such
influence. The use of the variable c in training is
of great importance for the method of inclusion of
new layers, because, with this artifice, it is possible to
guarantee that the influence of the new layer is grad-
ual, as the weights of the new layer adjust to the prob-
lem, since, by default, these are generated randomly
for each new layer inserted.
Due to the change in the sigmoid activation func-
tion mentioned above, it was necessary to use the
derivative of the altered function in the backpropaga-
tion algorithm (Eq. 3).
dφ
A
dn
= c · (y) · (1 − y) + (1 − c) (3)
where y is a traditional sigmoid function and c is the
weighting factor.
Using the D mask and the activation function
changed with the use of the variable c, the insertion of
a new layer did not interfere negatively in the learn-
ing, as it can be seen in the following chapter with
the presentation of the results obtained in the experi-
ments.
4 RESULTS AND DISCUSSION
CollabNet application was performed in a pattern
recognition task. The base used was the Wisconsin
Breast Cancer Dataset, withdrawn from the Machine
Learning Repository of the University of California
at Irvine (UCI). This database has information on 669
breast tumor registries, having two classes identified
as malignant (M) and benign (B) tumors, each with
ten calculated real characteristics for each cell nu-
cleus: radius, texture, perimeter, area, softness (local
variation in radius length), compactness (
perimetro
2
area−1.0
),
concavity (concave portions of the contour), concave
points, symmetry, and fractal dimension.
For this database, several configurations of the
proposed network were tested, varying several initial-
ization parameters, for both network and new layers:
number of neurons and epochs, learning rate, value
and moment of increment of variable c e of the mask
D (∆D) and the behavior of the weights in the train-
ing. However, the amount of neurons in the hidden
layers is a primary parameter that relates to the struc-
ture of the network. This parameter is defined at the
moment of creation of the network, being immutable
from the insertion of the second hidden layer, ensur-
ing that each new layer hidden changes only the depth
of the network and not its width.
4.1 Parameterization
The training parameters were estimated empirically
and always with the inclusion of a new layer. The
learning rate, the number of times, the behavior of
the weights of the new layer in relation to its initial-
ization are essential parameters of the insertion of a
new layer. Finally, we have the parameters related to
the behavior of the variable c and the mask D, defin-
ing information regarding the velocities of variation
of these variables in training.
Given the various parameters of the network, the
variable c deserves a more comprehensive explana-
tion, which in this project plays a special role. This
variable is directly related to the inclusion of a new
layer, as well as its transition, so that a newly in-
serted layer, not useful for learning the network, can
become an element of importance to this learning, as
presented in the Section 3. The variable c has the
responsibility to control the influence of a new layer
in training, being that influence is a quantity directly
proportional to the value of c, that is, the closer the
c is of its value (1), the higher the influence of the
new layer in training. Therefore, the control of c is
the great challenge of this proposal and the way that
the value of this variable increases during the training
of the new layer needs to be parameterized individu-
ally. The parameterization occurred empirically, with
values between 0.001 and 0.003 being chosen.
The designer must carefully observe the adjust-
ment of the increment of c since its correct parame-
terization has a direct influence on the behavior of the
MSE. Figure 6(a) presents an enlarged view of the last
training layer shown in Figure 6(b), wherein this in-
clusion an increment of the variable c relatively high
was defined, approximately 0.3 at each iteration. In
each iteration of c, it is possible to perceive the pertur-
bations in the MSE. This phenomenon is explained by
CollabNet - Collaborative Deep Learning Network
689
MSE
Epoch
0 50 100 150 200 250 300 350 400 450 500
0.0366
0.0367
0.0368
0.0369
0.037
0.0371
0.0372
0.0373
0.0374
0.0375
(a) Variable c with high incremental value
MSE
Epoch
0 200 400 600 800 1000 1200 1400 1600 1800 2000
3
2.5
2
1.5
1
0.5
0
(b) Variable c with low incremental value
Figure 6: The behavior of MSE variations of c.
a high variation of the variable c and by the weights
that are not yet close to the convergence of the final
value.
In Figure 6(b), the MSE is presented shortly after
the inclusion of a new layer with an increment of the
variable c relatively low. In this case, the influence of
the new layer is low and this new layer increases the
training time.
Also the variable c, the mask variation D also
plays a vital role in the inclusion and control of new
layers, necessitating that it be observed in the act of
inserting new layers, considering that ∆D has its vari-
ation intrinsic to the incremental value of c and is di-
rectly related to the mask transformation D. The cor-
rect parameterization of ∆D is essential for training
since this parameter together with the variable c con-
trols the influence of the new layer in the global train-
ing. The mask D must be started with 0, the exception
of the main diagonal and its update is carried out si-
multaneously with the variable c by the value ∆D.
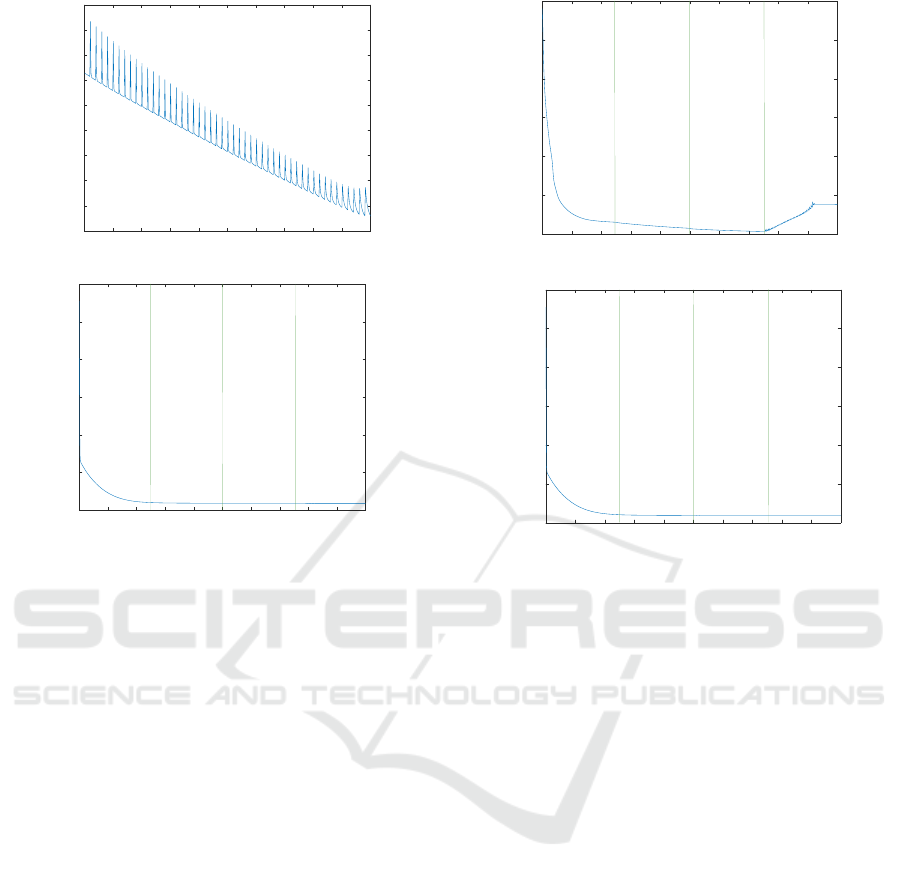
A non-harmonious configuration of these param-
eters results in the undesirable behavior of the MSE,
and consequently impairs training. As an example of
such undesirable behavior, cases are shown wherein
∆D is high 1 and low 2, respectively. This parame-
ter refers to the speed that mask D is invisible to the
training, that is, the process of inclusion of the new
layer has been completed.
MSE
Epoch
3
2.5
2
1.5
1
0.5
0
0 200 400 600 800 1000 1200 1400 1600 1800 2000
(a) ∆D with high value
MSE
Epoch
0 200 400 600 800 1000 1200 1400 1600 1800 2000
3
2.5
2
1.5
1
0.5
0
(b) ∆D with low value
Figure 7: The behavior of MSE variations of ∆D.
Figure 7(a) shows an undesired behavior in the
last layer, caused by the convergence velocity of the
mask D. In Figure 7(b), another unwanted behavior
is presented, where the influence of the new layer is
practically null because the updating rate of ∆D was
relatively small.
Another major challenge in CollabNet’s parame-
terization, as in any MLP-based approach, is the defi-
nition of the learning rate. This parameter is directly
related to the learning speed of the network. At Col-
labNet, the learning rate may be different for each
layer. In this way, it is necessary that the designer
has the sensitivity and the ability to define the value
of the learning rate for each layer. Figure 8(b) illus-
trates the CollabNet output, with three hidden layers
and the relatively low learning rate value (5x10
−5
).
In this example, the output MSE behavior is dis-
played with a low learning rate. Thus, the MSE tends
to continue the output of the network in previous lay-
ers, without promoting any improvement in the decay
of the output error.
In Figure 8(a), the error behavior is presented with
the inclusion of a new layer, now with learning rate
having a relatively high value (0.1). It is possible to
observe that the tendency of the error, in this case,
is to initially lower and soon after increasing sharply
with each increment of c. This behavior is explained
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
690
MSE
Epoch
(a) MSE with high learning rate value
MSE
Epoch
(b) MSE with low learning rate value
Figure 8: MSE for variations of learning rate.
by the fact that with the high learning rate at a time
where the weights of the new layer still do not con-
form to the weights already trained in previous lay-
ers, thus generating a greater disturbance in the MSE.
This fact can be still perceived, observing in the final
graphics part, where the weights are already more ad-
equate for the rest of the training, so the perturbation
of the NDE with each new increment of c is smaller.
4.2 Validation Metrics
In this work, the confusion matrix and receiver op-
erating characteristic (ROC) were used as evaluation
metrics. With the confusion matrix, one can check the
network performance in the task of sorting patterns,
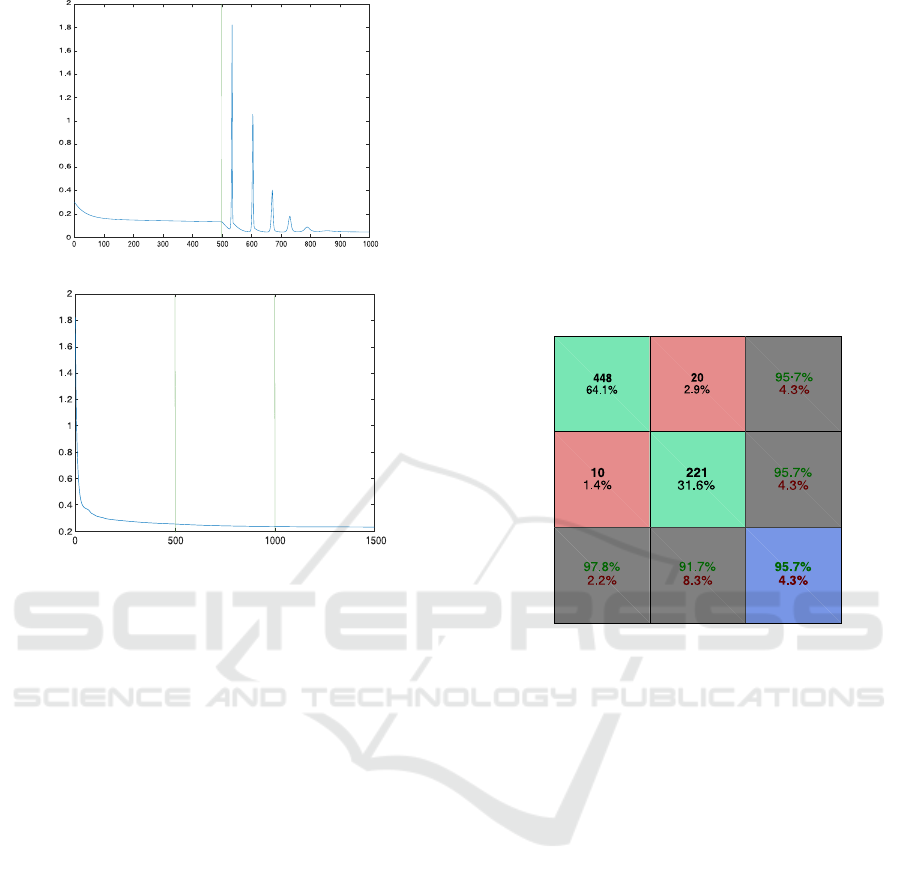
regardless of the class. Figure 9 presents the confu-
sion matrix obtained from the experiment quoted in
this section, finalized with five hidden layers. In this
figure, class 1 represents benign cases, and class 2
represents malignant cases, the first two diagonal cells
show the number and percentage of correct classifi-
cations by CollabNet, that is, 448 biopsies were cor-
rectly classified as benign (True Negative - TN) and
221 cases were correctly classified as malignant (True
Positive - TP), corresponding respectively to 64.1%
and 31.6% of the 699 biopsies. 20 samples (2.9% of
total) of the malignant biopsies were incorrectly clas-
sified as benign (False Positive - FP). Similarly, ten
biopsies (1.7 % of the data) were improperly classi-
fied as malignant (False Negative - FN).
Of the 468 benign predictions, 95.7% were cor-
rect and 4.3%, erroneous. Of the 231 malignant pre-
dictions, coincidentally, 95.7% were accurate and 4.3
%, incorrect. Of the 458 benign cases, 97.8% of the
cases were correctly predicted to be benign, and 2.2%
were predicted to be malignant. Of the 241 malignant
cases, 91.7% were correctly classified as malignant
and 8.3% as benign.
Overall, 95.7% of predictions were correct, and
4.3% were wrong classifications.
Output classes
Target classes
1
2
1
2
TN FN
TPFP
Figure 9: Matrix of confusion at the end of training.
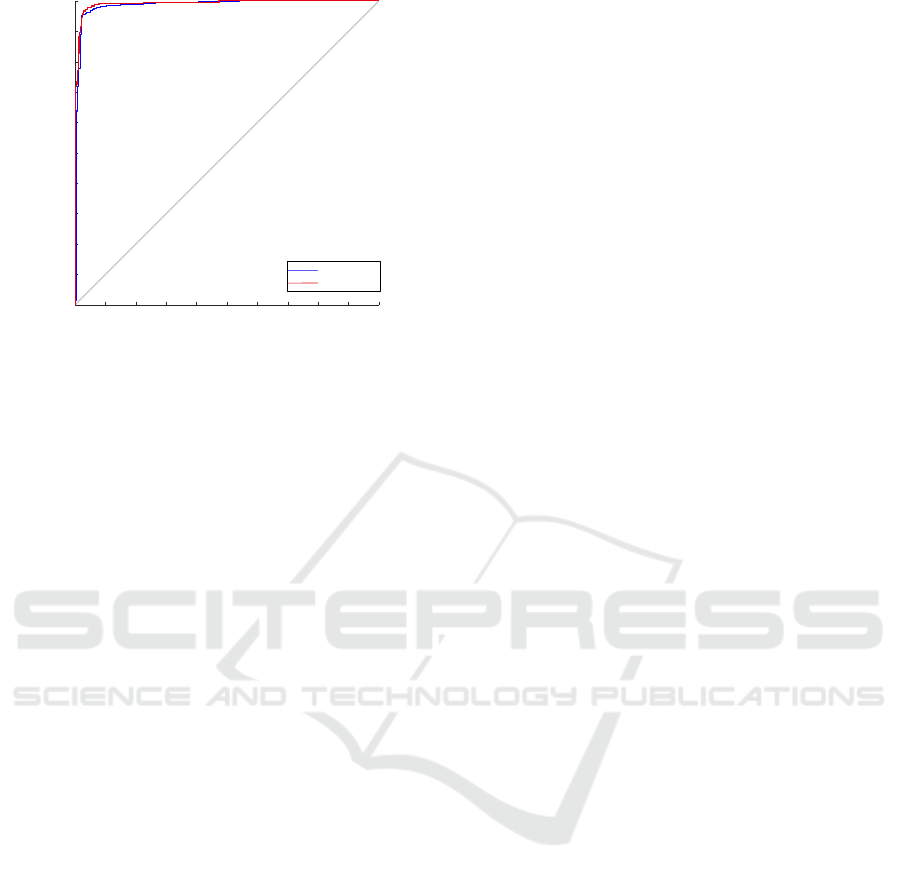
Another metric used in the evaluation of Collab-
Net is the ROC, or ROC curve, where for each class of
this classifier, there are values in the interval of [0,1]
for each output. For each class, two values are cal-
culated, the TP Rate or sensitivity and the FP Rate
or specificity. Therefore, sensitivity is the ability of
the system to correctly predict the condition for cases
that have it, whereas uniqueness is the ability of the
system to predict cases that do not have a certain con-
dition precisely.
Figure 10 illustrates the ROC plot for the Collab-
Net configuration presented in this section, where the
closer to the top left is the graph lines, the better the
ranking.
In this graph it is possible to see that both classes,
malignant (blue) and benign (red) tumors, have their
curves near the upper left corner, demonstrating the
efficiency of the method in the classification of the
selected database. However, a greater approxima-
tion of the curves at the point of interest of the ROC
curve must be object of constant search in any ma-
chine learning algorithm. In this way, parameter ad-
justments and more validation tests are essential in the
search for better classifier results.
CollabNet - Collaborative Deep Learning Network
691
Benign
Malignant
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
Figure 10: ROC plot.
5 CONCLUSIONS
This work proposes a training architecture inspired by
layered stacking techniques; however, this approach
goes hand in hand with the classic stacking since there
is no need to corrupt data entry for each new layer. In
this way, greater training control is achieved, start-
ing the training of a new layer always from the point
where the network stopped. For that, a change was
performed in sigmoid function allowing to control the
influence of the new layer in the global training of the
network.
The results obtained in the experiments of this
work demonstrate that this approach has a promis-
ing future regarding a new RNA concept, where good
results were obtained even with some training disci-
plines. The way how to process variable c and the use
of an intelligent algorithm to identify the ideal time
for the inclusion of a new layer are possible outcomes
of this work.
ACKNOWLEDGMENTS
The authors would like to acknowledge technical
and financial supports from the UFMA, FAPEMA,
MecaNET, IFTO and UNICEUMA.
REFERENCES
Arjovsky, M., Chintala, S., and Bottou, L. (2017). Wasser-
stein Generative Adversarial Networks. Proceedings
of The 34th International Conference on Machine
Learning, 70:214–223.
Bengio, Y. (2009). Learning Deep Architectures for
AI. Foundations and Trends
R
in Machine Learning,
2(1):1–127.
Bengio, Y., Lamblin, P., Popovici, D., and Larochelle, H.
(2006). Greedy Layer-Wise Training of Deep Net-
works. Advances in Neural Information Processing
Systems 19 (NIPS’06).
Glorot, X. and Bengio, Y. (2010). Understanding the diffi-
culty of training deep feedforward neural networks. In
Teh, Y. W. and Titterington, M., editors, Proceedings
of the Thirteenth International Conference on Artifi-
cial Intelligence and Statistics, volume 9 of Proceed-
ings of Machine Learning Research, pages 249–256,
Chia Laguna Resort, Sardinia, Italy. PMLR.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative Adversarial Nets. In Ad-
vances in Neural Information Processing Systems 27,
pages 2672–2680.
Huang, X., Li, Y., Poursaeed, O., Hopcroft, J., and Be-
longie, S. (2016). Stacked Generative Adversarial
Networks. Iclr, pages 1–25.
Larochelle, H., Erhan, D., and Vincent, P. (2009). Deep
Learning using Robust Interdependent Codes. Pro-
ceedings of the Twelfth International Conference on
Artificial Intelligence and Statistics (AISTATS 2009),
5:312–319.
Lecun, Y., Bengio, Y., and Hinton, G. (2015). Deep learn-
ing. Nature, 521(7553):436–444.
Netanyahu, N. S. (2016). Deeppainter : Painter classifi-
cation using deep convolutional autoencoders. In In-
ternational Conference on Arti cial Neural Networks
(ICANN), volume 9887, pages 1–8.
Schmidhuber, J. (2014). Deep learning in neural networks:
An overview. Neural Networks, 61:85–117.
Vincent, P. and Larochelle, H. (2010). Stacked denois-
ing autoencoders: Learning useful representations in
a deep network with a local denoising criterion pierre-
antoine manzagol. Journal of Machine Learning Re-
search, 11:3371–3408.
Wolberg, W. H., Street, W. N., and Mangasarian, O. L.
(2011). UCI Machine Learning Repository: Breast
Cancer Wisconsin (Diagnostic) Data Set.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
692
