
Dealing with Permanent Agent Failure in Dynamic Agents Organisations
Asia Ali Salman Al-karkhi
1
and Maria Fasli
2
1
Computer Science Department, University of Technology, Alsina’a Street, Baghdad, Iraq
2
Institute of Data Analytics and Data Science, University of Essex, Wivenhoe Park, Colchester CO4 3SQ, U.K.
Keywords:
Agent Organisations, Self-organisation, Organisation Recovery, Task Failure.
Abstract:
This paper is an exploratory study that focuses on the creation of open and dynamic agent organisations
which can sustain the provision of services to requesting customers in the presence of agent failure. In a
distributed environment, agents within networks and organisations are prone to failure. This can inevitably
lead to decreases in the individual agents’ utilisation as well as in the whole system’s and to the loss of
tasks. Here, we present an approach to tackling this challenge by enabling agents to prevent these kinds
of disruptions. In an environment where agents create organisations to increase the execution of tasks, we
employ the Henchman Recovery Protocol (HRP) within each organisation; this enables the agents within an
organisation to maintain its functionality in the presence of agent failures and in particular in the case of the
lead (Head) of the organisation failing. Furthermore, we explore the stability and evolution of organisations
over a period of time and when agents drop out of organisations (due to permanent failure) while new agents
may enter the environment and either join existing organisations or create new ones. We conduct our study
in the context of a grid-like computing system which was implemented in the Repast Simphony agent-based
simulation environment.
1 INTRODUCTION
Dealing with failure in distributed systems is a signi-
ficant challenge as such systems are large, open and
complex. Therefore, providing methods for automa-
tic failure detection is important, and this is still con-
sidered an open problem (łgorzata Steinder and Sethi,
2004). However, agent or node failure is unpredicta-
ble and therefore a non-trivial problem to tackle.
In order to provide seamless services in a num-
ber of domains such as grid environments and cloud
computing, a number of often heterogeneous service
providers, actors/nodes are clustered behind an inter-
face that is providing access to these services to cu-
stomers. The main goal of creating grid computing
systems has been to be able to provide services and
to share resources as fast as possible, just as power is
shared across an electric power grid, as noted by Ian
Foster in (Foster and Kesselman, 2003).
To study the problem and explore potential so-
lutions, we have simulated a grid-like environment
through the use of multi-agent systems. In our system,
each agent is essentially a node providing services and
resources, i.e. a services provider, to requesting cus-
tomers. To improve their own utilisation, agents can
organise themselves in groups or organisations when
certain conditions arise in the system. As we show,
through organising the agents in organisations, the sy-
stem utilisation as a whole improves. Nevertheless,
agents within the organisations and within the system
as a whole can fail. An agent’s failure will almost cer-
tainly affect the stability and performance of the orga-
nisations that it belongs to. One solution for open and
dynamic systems, can be the use of self-organising
technique so that depending on the circumstances in
the environment, the available agents can still provide
the system with the required services. These kinds
of techniques are becoming ever more prevalent with
respect to networked systems and hence we are in-
terested in exploring techniques that will enable the
agents to maintain the effectiveness of the organisati-
ons and task execution. Although we show how agent
organisations can cope in the presence of failure of
individual agents and are able to maintain task execu-
tion, the problem of agent failure is more acute in the
event where the lead agent of an organisation, termed
Head, fails. In this paper, we explore the use of the
Henchman Recovery Protocol (HRP) to enable orga-
nisations to continue to function even in the event of
the Head failing.
In grid computing, solutions for the problems cau-
sed by faults, include methods to increase fault tole-
Al-Karkhi, A. and Fasli, M.
Dealing with Permanent Agent Failure in Dynamic Agents Organisations.
DOI: 10.5220/0007399907150723
In Proceedings of the 11th International Conference on Agents and Artificial Intelligence (ICAART 2019), pages 715-723
ISBN: 978-989-758-350-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
715

rance, recovery, and removal. The main fault tole-
rance techniques which have been used in cluster sy-
stems and grid computing are checking points, mes-
sage logging, replication and retry (Haider and An-
sari, 2012). A more recent study of agent failure in
distributed MAS is (Hayashi, 2017) where the author
has addressed agent failure in situations where disas-
ter repeatedly occurs. Consecutive or simultaneous
agent failures may occur in the future as a result of
the disaster event. A comparison has been carried out
to find a viable method for decreasing the number of
failed agents in the system.
The rest of the paper is organised as follows.
Section 2 Scenario description; section 3 creation of
organisations and roles of agents; section 4 presents
explanations about HRP, and also introduces the al-
gorithm that is used by each Henchman inside the
created organisation to monitor the Head. Sections
5 presents the experimental work. Section 6 evalua-
tion of HRP; section 7 discusses the related work in
the literature Finally, the paper ends in section 8 with
the conclusions and proposal for future work.
2 SCENARIO DESCRIPTION
There are two types of agents in the system under
consideration: the customer agent, which is used to
simulate task requests emanating from multiple cus-
tomers that may exist in reality, and service providers
which possess the resources to execute tasks, which
we will simply refer to as agents here on.The agents
have diverse resources and can execute heterogene-
ous tasks and provide services; these match the re-
quirements of the customers to various extents. The
customer agent simulates the existence of several cu-
stomers which need to find services or have tasks exe-
cuted and sends its requests to the network of agents
via messages describing the tasks requiring execution
and associated resources as well as other conditions
such as a deadline by which the result of the task is
required.
2.1 Tasks and Resources
In a distributed environment, resources would be he-
terogeneous. There are different methods for repre-
senting resources (Carroll and Klyne, 2004), however,
for the purposes of this research the resources associ-
ated with a task have been represented in a simpler
way as this is not the main focus of the research and
using the format:
RV = < r1, r2, r3 >.
An agent in the network that receives a task will
check whether the task’s resources match with its re-
sources. Given the simple way of representing resour-
ces, proximity of requested with available resources is
calculated between the customer resource vector and
an agent’s resources using the well-known Manhattan
Distance (Manhattan Dis) Equation 2:
Manhattan Dis(RV, AR) =
x=2
∑
x=0
|
RV
x
− AR
x
|
(1)
Where:
RV
x
: the requested resources vector for the task.
AR
x
: the matched agent resources that performs task
successfully.
x = 0 to 2: the index of the requested resource vector,
<r
1
, r
2
, r
3
>.
The resulting matching value should meet the
task’s required accuracy; this is a specific value be-
tween (0 − 12). Therefore, in the task delegation pro-
tocol as shown in (AL-Karkhi and Fasli, 2017) an
agent accepts a task if a matching has occurred bet-
ween the customer resources and its resources. For
example, where a customer issues a task with RV is
<0, 0, 0> and has required accuracy (RA) equal to 6,
and the recipient agent’s RV is <2, 2, 2>, then when
applying the Manhattan Distance equation, the match
will be positive.
In addition to resources, tasks have Time To Live
(T T L) and a Time Deadline (T D). T T L indicates
the number of hops among agents that a message can
make in advancing throughout the network, while T D
indicates the deadline for the execution of the task. If
T T L = 0, the task will be considered to have failed,
otherwise, the receiving agent will check the T D of
the task; if this is sufficient then the task will be exe-
cuted, but if it is not sufficient (either because the re-
ceived agent is currently executing a task or its queue
of tasks already contains a number of tasks) the agent
will then delegate the task to a neighbour agent in the
network. Hence, if an agent cannot satisfy at least
one of the conditions described above, the task will be
either failed or delegated to another agent in the net-
work. The agents are autonomous and self-interested
and have the desire to maximise the benefit to them-
selves; therefore, agents will keep the accepted tasks
in their Accepted Tasks Queue (ATQ) for as long as
they are currently busy executing task.
2.2 Initial Network Formation
We assume a system where agents are created and
start execution and as part of this they formulate an
initial network through connections with each other.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
716

This initial network formation occurs within the first
few simulation cycles. In the initial phase, the agents
acquire partial knowledge of their surrounding envi-
ronment by creating a contact list. A network model
of 300 agents visualized using Gephi (Bastian et al.,
2009) with (the Force Altas 2) layout which is useful
to visualise Small-World network and scale free net-
works is illustrated in Figure 1. The various colours
represent the degree of each node i.e the number of
connections for each agent.
Figure 1: Visualisation of network size: 300 agents. The
various colours represent the degree of each node; purple=1
connection, light green=2, blue=3, black=4, orange=5,
green=6,red=7, light pink=8, grey=9 or more.
As agents receive requests for tasks from the cu-
stomer, they will check whether these can be servi-
ced or not. They then use their contacts to essenti-
ally propagate the tasks that they are unable to exe-
cute for different reasons (unable to execute because
they are busy; not in possession of required resources,
etc.). An agent in the network may fail randomly and
permanently. An agent can detect other failed agents
through the task delegation process. When an agent
delegates a message to another agent, if it does not
receive a response from that agent for a number of
cycles, then that agent will be considered failed. The-
refore, the sender agent will delete its contact infor-
mation related to that failed agent. Hence, the net-
work could gradually reduce and eventually even col-
lapse. However, as agents may fail, new agent(s) may
be created and inserted in the system. A new agent
will send messages to randomly-selected other agents
– to obtain at least partial knowledge of its surroun-
ding environment – and get connected to the network.
New agents can offer their services either directly to
the customer or via the task delegation protocol as
described in see (AL-Karkhi and Fasli, 2017).
2.3 Agent Failure Modelling
In order to model agent failing in the network, agents
are equipped with a parameter that enables them to be
switched on/off for a period of time, and when they
are off they, in essence, they create the impression to
the system that they are offline and unable to execute
tasks or respond to messages. We have a probability
distribution between[0,1] such that a lower (nearer 0)
probability value produces fewer failed agents and a
higher probability value (nearer 0.9) will produce a
larger number of failed agents in the system. During
the initialization step of the simulation, all agents are
assigned the same probability of failure. Applying a
high failure rate simulates the harsh operational con-
ditions which exist in some systems and enables us
to study effects on the system overall and individual
agent behaviour in extreme circumstances.
3 CREATION OF
ORGANISATIONS AND ROLES
OF AGENTS
While the initial network formation enables agents to
create links and propagate tasks to each other that they
are unable to execute themselves through this network
and therefore increase task execution, it still leaves
the system fairly under-utilised with tasks remaining
un-executed or failing due to the unfocused propaga-
tion of task messages through an agent’s essentially
random connections. In order to increase the system
utilisation, we are creating organisations within the
network to enable more targeted and faster task dele-
gation. To enable the creation of organisations, agents
are taking on roles. An agent role can be defined
as an agent behaviour that can affect, enhance and/or
change a system’s structure. Typically a role will po-
sit expectations, skills and duties and hence an agent
which takes on a particular role must be able satisfy
these requirements (Ferber et al., 2003). Each agent
a
i
, at any one time, has a number of roles R
i
.
• R
i
is defined as a set of roles, < R
1
, R
2
, R
3
, R
4
>
• An agent a
i
can assume a role in relation to at least
one other agent, which can be an individual or an
organisation.
• The roles an agent may take on within an orga-
nisation are {Member, Henchman, Head}, each
agent may have one of these roles or more than
one, depending on a set of conditions.
• If a
i
has a role it may accept consequential role(s),
this means that an agent that is a Member in an
Dealing with Permanent Agent Failure in Dynamic Agents Organisations
717

organisation later on may accept the Head
0
s mes-
sage to be the organisation’s Henchman agent.
• If Org
p
and Org
q
are two created organisations,
then a
i
can belong to both of them. In turn,
any two or more organisations in the network can
share a number of Members, so an agent can have
different or the same Roles: if the overlapped or-
ganisations( Org
p
, Org
q
):
1. a
i
can be Member in Org
p
, Member in Org
q
.
2. a
i
can be Head in Org
p
, Member in Org
q
.
3. a
i
can be Henchman in Org
p
, Member in Org
q
.
4. a
i
can be Head in Org
p
, Not Henchman in
Org
q
.
5. a
i
can be Henchman in Org
p
, Not Henchman
in Org
q
.
6. a
i
can be Henchman in Org
p
, Not Head in
Org
q
.
• The Head of each organisation is responsible for
the activities of its agents. The presence of a Head
in an organisation of agents is necessary in order
to coordinate the work.
• A Henchman in an organisation will become a
temporary Head when the Head of its organisa-
tion has failed.
• Agents are expected to take on and change roles
while they are operating in the environment.
Typically an agent will initiate the process of crea-
ting an organisation when certain circumstances in the
system arise and the agent essentially becomes overly
busy and unable to handle additional requests. The
initiator agent, becomes the Head of the organisation
and start asking other agents in the network to join its
organisation, see (AL-Karkhi and Fasli, 2017). Orga-
nisations can be created as either consisting of a set of
agents holding similar resources (within boundaries
specified by the Head) or heterogeneous resources,
leading to heterogeneous organisations. The Head is
responsible for delegating tasks to the Member agents
and keeping track of task execution within the system
communicating with the customer. The creation of
organisations in the system can lead to increased uti-
lisation of the resources of the agents(Dignum et al.,
2004), but as has been noted in an organisation that
is part of a grid computing system, a computational
node may still be underutilised and not fulfil its po-
tential; this can be only 5% or even less of the time
(Haider and Nazir, 2016). This motivated us to create
overlapped organisations; we aimed to increase the
agents’ resource utilisation by allowing agents to join
more than one organisation. However, in practice, de-
pending on how busy it is, an agent can only be com-
mitted to a limited number of organizations at any one
time. We also limit the maximum number of organisa-
tions that an agent can join by setting a parameter and
this varies from agent to agent. So, this will lead to the
creation of overlapping communities/organisations as
shown in Figure 2 (a) and Figure 2 (b).
(a) Several overlapped or-
ganisations structure.
(b) Simplified structure,
an example of overlapping
organisations where q=3
Figure 2: Illustration of the concept of overlapping organi-
sations. In Figure (b), the Blue organisation overlaps with
the Green and the Red organisations in terms of a single
node, whereas the Green overlaps with the Red in relation
to two nodes. These overlapping regions are in the inter-
section of the large circles.
4 HENCHMAN RECOVERY
PROTOCOL (HRP)
Although agent utilisation may improve through the
creation of organisations, agents within organisati-
ons may fail. The failed agent could be a Head or
a Member. If it is a Head, then when a Member
wants to send messages to the Head and there is no re-
sponse from the Head and after a number of attempts,
the Member will consider the Head to have failed.
When a Member agent has failed, the Head will de-
tect this after a number of attempts at sending messa-
ges; in this latter situation, the Head will remove the
Member from its database (DB). Although task exe-
cution will be affected by a Member failing, the case
of Head failure is more acute as it essentially means
that the organisation becomes disconnected and this
leads to further task failures and under-utilisation of
resources. In this section, we describe how we have
deployed the HRP protocol in each organisation in or-
der to recover more of the customer tasks. In the li-
terature, most of the available methods that provide
fault tolerance, use reactive techniques; these provide
solutions to failure only after its occurrence. In con-
trast, we argue that using multi-agent systems with
self-organising capabilities represented by HRP can
provide a proactive methodology which can improve
task execution in open, dynamic and distributed envi-
ronments.
The Head is the agent which is responsible for
distributing the tasks to its Members in an organisa-
tion, so that if the Head fails, the tasks will also fail,
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
718

and this will affect the performance of the system as a
whole and lead to the loss of more tasks. To avoid this
loss of tasks and enhance the performance of the sy-
stem, a new role, that of the Henchman is used to ad-
dress this problem. When a Head fails, the role of the
Henchman is to detect the failure of its Head and act
as a substitute to the failed Head, providing further
self-organised capability to the system, maintaining
the functionality of the organisation. Each Member
has the ability to decide to accept a new role or to re-
ject it. The following describes the mechanism of the
Henchman role in more detail.
The first stage of the HRP is performed during
the runtime process of the gossip algorithm – Algo-
rithm 1, which is based on the multi-cast “Push Gos-
sip” algorithm (Serugendo et al., 2011). The process
is started by the Head agent sending out a message
to the first agent a
i
that joined the Head
0
s organi-
sation, asking the agent whether it will agree to be
its (the Head
0
s) Henchman (HM). The Head will
send the same message to all the other agents that
joined in sequence until one of the Members accept
the Head
0
s message and becomes the organisation’s
Henchman and this is what we called it “BeMyHen-
chman” acknowledgement messaging technique.
After assigning a Henchman for its organisation,
the Head has the responsibility to synchronize its
database DB with that of the Henchman; this con-
tains the contact details of the Members, and will,
of every newly joined agent. This means that the
Henchman
0
s DB will always be maintained to be
identical to the Head
0
s DB. When the Head goes
offline, the Henchman will immediately replace the
Head to maintain the functionality of the organisa-
tion.
If the Henchman does not receive any acknow-
ledgement back from the Head, the Henchman will
declare to all the other Members and the customer
agent that the Head has failed and the new Head is
the Henchman; this is in order to redirect the traffic
to itself instead. When the Head recovers, i.e. the
Henchman receives an “I’m alive” messages again
from the Head, the Henchman will inform the organi-
sation Members as well as the customer that the Head
is now alive and the organisation should be back to its
normal condition. However, there is also the chance
that a disruption will affect both the Head and its
Henchman at the same time. Here, if the customer
agent sends tasks while this is the case, these tasks
will fail – until the Head and/or the Henchman return
to an active state.
If the failed agent is one which has a Henchman
role in one of the existing organizations, the Head
will remove it from its DB and the Members will be
informed by the Head that the Henchman is no longer
functioning. The Head agent will then assign a new
Henchman for its organisation.
If both the Head and then the Henchman of the
organisation have failed, the organization will have
neither a Head nor a Henchman, and in such cases,
when the Members want to access them by sending
messages they will receive no reply, and after a num-
ber of attempts the Members will consider the organi-
sation to have been disbanded.
Algorithm 1: Gossip Protocol.
Input: a
i
: is the most busy agent (Head) that will
create an organisation, a
x
is one of the a
i
con-
tacted list neighbour, T T L > 0.
Output: a
i
completed organisation.
1: Cycle e
2: a
i
.SendMessage (Contactlist(1,N))
3: if ( a
x
! = busy ) then
4: a
x
infected with the gossip message of a
i
5: // a
x
has the option to join or not to the created
organisation.
6: applying “BeMyHenchman” acknowledge-
ment messaging technique to select aMember
to be aHenchman.
7: else if ( a
x
== busy ) then
8: a
x
.SendMessage (1,(N))
9: end if
10: if (T T L > 0) then
11: T T L = T T L − 1
12: end if
13: Cycle e + 1
14: End
5 EXPERIMENTAL WORK
We have developed three models (HRP, Organisa-
tion Ver1 and No Organisation) which all use the set-
ting parameters, as in Table 1. In relation to these
three models, we have shown the results of various
network sizes (500, 5000) agents, task distributions
(the task distribution is used to specify the number of
tasks sent from customer to the network of agents in
each cycle) and simulation times. For all of the three
models, the number of tasks sent from the customer
agent follows a normal distribution with specific va-
lues for the mean and variance. The simulation time
was set at 7000 cycles for all of the three models.
• No Organisation model is a network model with
only task delegation property.
• Organisation Ver1 model is a model that contains
the organisations of agents.
Dealing with Permanent Agent Failure in Dynamic Agents Organisations
719
• HRP model is the organisations model with HRP
protocol capability.
Table 1: Experimental Setting Parameters.
Agent Network Size Task distribution
500 Mean=1000,variance=10
2500 Mean=1000,variance=10
5000 Mean=1000,variance=10
ANSET =
1
N
R
N
R
∑
i=1
x=2
∑
x=0
|
RV
x
− AR
x
|
(2)
Where:
N
R
: the number of runs = 10.
RV
x
: the requested resources vector for the task.
AR
x
: the matched agent resources that performs task
successfully.
x = 0 to 2 : the index of the tuple that represent the
requested resource vector <r
1
, r
2
, r
3
>.
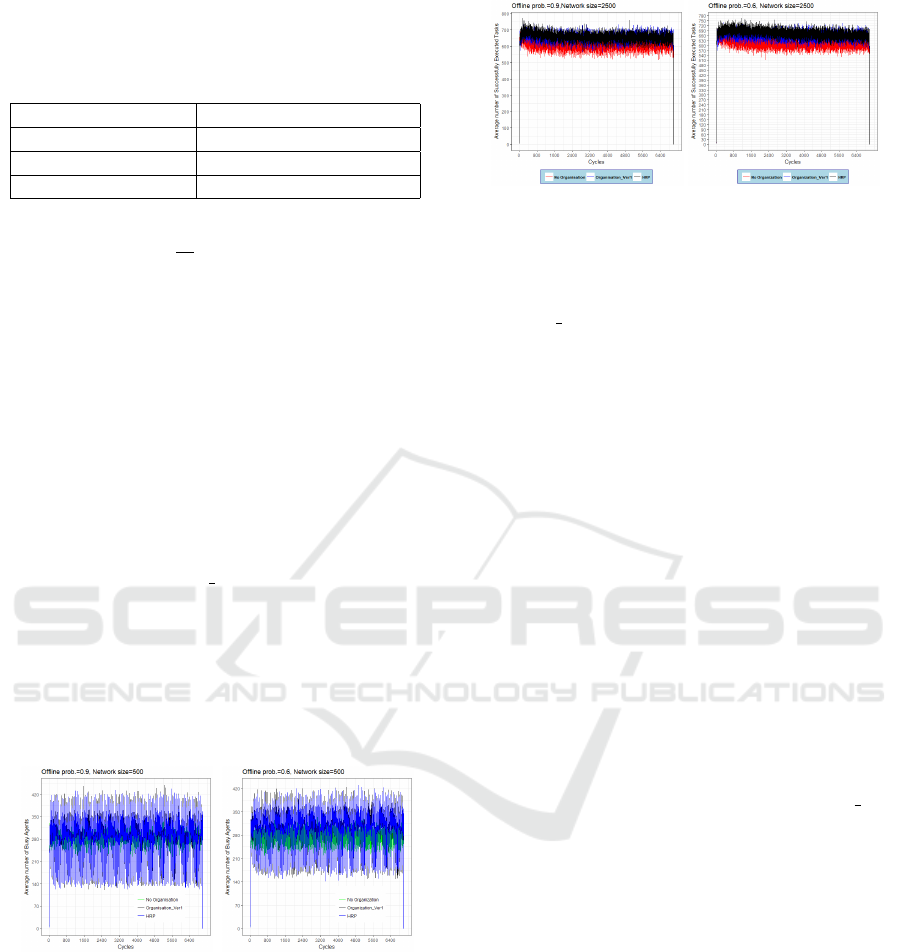
Figure 3 (a) and Figure 3 (b) show the average
number of successfully executed tasks, ANSET,
within the cycles, for each of the three models which
have been implemented, see Equation 2. Note that the
two models (Organisation Ver1 and HRP) have a spe-
cific structure in terms of their organisations and also
have gradual responsibilities for their agents: agents
have different roles(Head, Henchman, Member).
However, the roles of agents may change over the si-
mulation time and agents disappear and new agents
appear; these changes will affect the execution of
tasks and the system’s ability to schedule tasks.
(a) (b)
Figure 3: Average numbers of successfully executed tasks
computed across 7000 simulation cycles, p= 0.9 and p= 0.6.
The No Organisation model consistently delivers
lower numbers of successfully executed tasks over
the simulation time (than the other two). So, using
this model, the system loses a significant number of
tasks due to frequent agent failures and the restricti-
ons imposed by the messages’ Time To Live (T T L)
and the tasks’ deadlines. In this model, the resources
are distributed and the delegation for the task mes-
sage may take more time to reach a desired agent that
(a) (b)
Figure 4: Average numbers of successfully executed tasks
computed across 7000 simulation cycles, p= 0.9 and p= 0.6.
can accept the task. Hence, the other two models, Or-
ganisation Ver1 and HRP, show better performance;
in these cases, fewer hops are required in order to
find agents which can accept the tasks because, even
though there is a probability of failure, the organisati-
ons are created with heterogeneous resources and the-
refore, in the event of failure, other agents are readily
available to execute the tasks. The ANSETs of these
two models fluctuate due to the presence of the proba-
bility of failure, which causes disruption in the system
such that agents will start to fail inside the created or-
ganisations leading to significant changes in the exe-
cution rates of the tasks. The No organisations model
shows a smaller percentage of variation in its ANSET
as compared to the other two models. It is clear that
the No Organisation model executes tasks within the
same ranges of time, on average, in each and every
simulation cycle. This is because the model con-
tains no structure and new agents may connect rand-
omly with other existent individual agents. Where the
task may be executed is dependant only on delegation
across the entire network, and this quickly consumes
the tasks’ T T L values. Hence, the Organisation Ver1
and HRP models perform better on average than does
the “No Organisation” model.
In Figure 4 (a) and Figure4 (b), it is noteworthy
that, with network size 2500, the system activity beco-
mes more stable, showing less fluctuation in the AN-
SET values than in a network size of 500 agents. Even
in the presence of significant numbers of failures, the
HRP model achieves the highest average number of
successfully executed tasks. This is because, first, the
higher the number of agents in the system the more
organisations can be created with a greater variety of
resources. Second, when failures occur in the system,
there are other agents which are able to join the net-
work structure and so can also join the existing orga-
nisations.
In Figure 5 (a), and Figure 5 (b), where increasing
the network size leads to there being higher numbers
of tasks executed within the simulation cycles: the
ANSET is more than with the other two network sizes
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
720

(2500, 500). In models Organisation Ver1 and HRP,
the created organisations consist of a large number
of heterogeneous agents, so even with the failure of
an agent the Head will probably still able to find a
Member that can satisfy the required resources. Mo-
reover, the existence of the Henchman in the HRP has
added benefit to the system.
(a) (b)
Figure 5: Average numbers of successfully executed tasks
computed across 7000 simulation cycles, p=0.9 and p=0.6.
6 EVALUATION OF THE HRP
MODEL
We have compared HRP with other methods from
the literature. The results from the HRP model with
network sizes (500, 2500, 5000). However, due to
the limited space we have included only the experi-
mental work of 5000 agents. were compared against
the master-standby system (Chen, 2007). The Master
(MAS)/standby (SBS) model is a fault tolerance mo-
del in which the system has two servers. The first one
is called the MAS and all the clients are connected
to it. The second is called the SBS – the clients are
only connected to this when the MAS has failed. Furt-
hermore, there is a checking message transmitted be-
tween the MAS and the SBS which enables the SBS
to switch to active mode and serve the clients’ reque-
sts in place of a failed MAS. We have implemented
this architecture within our simulation set-up, and the
results are depicted in the following Figures:
(a) (b)
Figure 6: Average number of successfully executed task ra-
tio in/out organisations with probability p= 0.9 and p= 0.6.
In Figure 6 (a), and Figure 6 (b), we have com-
puted the number of executed tasks ratio, ANETR, in
relation to the following: various different required
accuracies; execution inside and outside of organisa-
tions; a network size of 5000 agents; and two pro-
babilities of failure – 0.9 and 0.6. As shown, a net-
work where HRP operates within organisations out-
performs the MAS/SBS model. This is because the
MAS/SBS model depends for its operation on its de-
legation process, and a smaller number of tasks have
been executed inside its organisations as a result of
the fact that this model has no structural roles such
as those in the HRP model’s organisations. Members
inside the organisations have roles and they can dele-
gate tasks to the Head
0
s of organisations that they are
part of. Also, the Head and the Henchman of an orga-
nisation each have a significant role to perform within
it. However, in MAS/SBS the nodes delegate tasks to
other nodes in the emerged organisations, and if no
agent can accept the task the task will be delegated
across the network which consumes its T T L values.
7 RELATED WORK
Real world networks can consist of multi-layers that
can all be affected by unpredictable changes (disrup-
tions) in their structure (De Domenico et al., 2014).
Therefore, to investigate the tolerance to failure of our
system, we created three different models: the first
is a straightforward network of agents model; the se-
cond model implements a virtual layer of organisati-
ons which provides a self-organised multi-agent and
the application of roles and protocols for the agents;
and the third is the HRP model.
In the literature, many studies have used bio-
inspired methods to solve NP hard problems be-
cause they are considered an appropriate mechanism
to study complex systems. In (Stamatopoulou et al.,
2004) studies have used bio-inspired, bird flocking,
method in creating dynamic organisations of multi-
agents with the ability to reconfigure the system indi-
vidual connections. The authors have used two formal
mechanisms, first P-systems (Nematollahi Mahani,
2012) with active members and second software en-
gineering communication language X-machines with
active membranes in order to model flocking agents.
Agents can have various roles (leader, donor, incuba-
tor). The produced system is very complex and cannot
be animated.
Researches in (Dignum et al., 2004) have discus-
sed the different organisational structure: social or-
ganisations and emerging organisations; that can be
deployed to organise agents. They have also explai-
Dealing with Permanent Agent Failure in Dynamic Agents Organisations
721

ned how it is difficult to describe at what point the
organisations may reorganise for better performance
and utilization but without showing any solution. In
our work the dynamic organisations may re-organise
because of agents failure which may lead to create
another organisation or participate in already existed
ones and with the aid of the HRP the task execution
output has increased.
Many works in literature, such as (Kota et al.,
2009) that use the agent organisations and the cre-
ated organisations reconfigured again depend on the
type of task been sent to the organisations without
claiming and type of technique that will lead to this
action of creation. Unlike our work the organisations
are created based on triggering conditions to provide
proactive solution to the failure case. In our work, the
created organisations have the ability to reconfigure
themselves as an occurrence with critical event (fai-
lure). Hence, organisations may be created or disban-
ded depending on the network real problems whatsoe-
ver are the types of coming tasks.
Researcher in (Ferber et al., 2003) presented a
method to reorganise organisations by applying a met-
hod that can be carried by the individual agents in the
system. A pair of agent can decide when to reorganise
and with whom they can create the new organisation
based on their utility values. The new connections
will not change the inner characteristic of agents. In
our work when new agents are added to the system
some new roles will emerge in the system. The update
to the already existed organisations can lead to better
performance since the new agents can be Henchman,
Member or they can be Heads of new organisations
when the triggering conditions met.
In (Mathieu et al., 2002) the authors have presen-
ted self-adaptation of a multi-agent systems for orga-
nisations. The dynamic interaction between agents
and their decision-making capabilities may lead to
either an agent decision to keep itself connected to its
organisation or change its connection for better per-
formance with other organisations. Aiming to reduce
the message flow in the organisations to enhance the
system behaviour. In our work, agents may be added
to the system leading to update the existing connecti-
ons and enhancing the system output.
8 CONCLUSIONS
This paper focuses on studying the creation of open
and dynamic agent organisation formations which can
provide services to requesting customers in the pre-
sence of failure. This can lead to the loss of tasks
and to decreases in the effectiveness and utilisation
of agent networks. We have presented a framework
whereby agents and organisations can be counted on
to provide remedies which can avert these kinds of
disruptions. Our aim was to deploy the Henchman
Recovery Protocol. HRP, within each organisation;
this is a viable solution for maintaining the functio-
nality of the organisations. After that, we explore the
performance and stability of the created organisations
in the situation where we have agents malfunctioning
and others appearing. The new agents may simply be-
come part of existent organisations or their presence
may result in the emergence of new organisations.
Weeding out failure from distributed systems
requires sound theories and efficient solutions that
can be applicable in order to maintain systems sta-
bilities (Bao and Garcia-Luna-Aceves, 2003),(Haider
and Nazir, 2016). Grid computing is the target dom-
ain for this work because it can provide researchers
with a suitable environment in which to apply our vir-
tual organisations as well as in which to study node
failure. Our solution is to apply a heuristic protocol,
HRP, in order to recover customer tasks and preser-
ves the organisations’ formation structure. HRP has
been shown to have a more acceptable performance
as compared to the MAS/SBS model. The existence
of roles inside the heterogeneous organisations plays
an important role in the self-organisation of the sy-
stems and provides a pro-active technique for dea-
ling with failure. The experiments have shown that
the HRP produces fewer traffic messages than the
other models: (No Organisation, Organisation Ver1,
MAS/SBS). As part of future work, we will explore
adding the ability to learn to the agents in the emer-
ging organisations to explore how this can affect sy-
stem performance.
REFERENCES
AL-Karkhi, A. and Fasli, M. (2017). Deploying self-
organisation to improve task execution in a multi-
agent systems. In 2017 3rd IEEE International Con-
ference on Cybernetics (CYBCONF), pages 1–8.
Bao, L. and Garcia-Luna-Aceves, J. J. (2003). Topology
management in ad hoc networks. In Proceedings of
the 4th ACM international symposium on Mobile ad
hoc networking & computing, pages 129–140. ACM.
Bastian, M., Heymann, S., Jacomy, M., et al. (2009). Gephi:
an open source software for exploring and manipula-
ting networks.
Carroll, J. J. and Klyne, G. (2004). Resource description
framework ({RDF}): Concepts and abstract syntax.
Chen, C.-W. (2007). Dual redundant server system for
transmitting packets via linking line and method the-
reof.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
722

De Domenico, M., Sol
´
e-Ribalta, A., G
´
omez, S., and Are-
nas, A. (2014). Navigability of interconnected net-
works under random failures. Proceedings of the Na-
tional Academy of Sciences, 111(23):8351–8356.
Dignum, M., Sonenberg, E., and Dignum, F. (2004). Dyna-
mic reorganization of agent societies. In Proceedings
of workshop on coordination in emergent agent socie-
ties.
Ferber, J., Gutknecht, O., and Michel, F. (2003). From
agents to organizations: an organizational view of
multi-agent systems. In International Workshop on
Agent-Oriented Software Engineering, pages 214–
230. Springer.
Foster, I. and Kesselman, C. (2003). The Grid 2: Blueprint
for a new computing infrastructure. Elsevier.
Haider, S. and Ansari, N. R. (2012). Temperature based
fault forecasting in computer clusters. In Multitopic
Conference (INMIC), 2012 15th International, pages
69–77. IEEE.
Haider, S. and Nazir, B. (2016). Fault tolerance in com-
putational grids: perspectives, challenges, and issues.
SpringerPlus, 5(1):1991.
Hayashi, H. (2017). Comparing repair-task-allocation stra-
tegies in mas. In Proceedings of the 9th Internatio-
nal Conference on Agents and Artificial Intelligence -
Volume 1: ICAART,, pages 17–27. INSTICC, SciTe-
Press.
Kota, R., Gibbins, N., and Jennings, N. R. (2009). Self-
organising agent organisations. In Proceedings of The
8th International Conference on Autonomous Agents
and Multiagent Systems-Volume 2, pages 797–804. In-
ternational Foundation for Autonomous Agents and
Multiagent Systems.
łgorzata Steinder, M. and Sethi, A. S. (2004). A survey
of fault localization techniques in computer networks.
Science of computer programming, 53(2):165–194.
Mathieu, P., Routier, J.-C., and Secq, Y. (2002). Dynamic
organization of multi-agent systems. In Proceedings
of the first international joint conference on Autono-
mous agents and multiagent systems: part 1, pages
451–452. ACM.
Nematollahi Mahani, M. (2012). Strategic structural reor-
ganization in multi-agent systems inspired by social
organization theory. PhD thesis, University of Kan-
sas.
Serugendo, G. D. M., Gleizes, M.-P., and Karageorgos, A.
(2011). Self-organising software: From natural to ar-
tificial adaptation. Springer Science Business Media.
Stamatopoulou, I., Gheorghe, M., and Kefalas, P. (2004).
Modelling dynamic organization of biology-inspired
multi-agent systems with communicating x-machines
and population p systems. In International Workshop
on Membrane Computing, pages 389–403. Springer.
Dealing with Permanent Agent Failure in Dynamic Agents Organisations
723
