Motion Capture and MultiBody Simulations to Determine Actuation
Requirements for an Assistive Exoskeleton
Daniel S
´
a Pina
1,2
, Joaquim Gabriel
1
and Renato Natal
1
1
Faculty of Engineering, University of Porto, Porto, Portugal
2
INEGI - Institute of Science and Innovation in Mechanical and Industrial Engineering, Porto, Portugal
Keywords:
Biomechanics, OpenSim, Exoskeleton.
Abstract:
EUROSTAT’s projections show that, by 2040, the people aged 65 or more will account to almost one fourth of
the population. These statistics raise concerns over the sustainability of the society, so technological solutions
have been emerging to prolong the active age of European citizens. One of the main impairments for elders
is an increasing difficulty in performing daily lower-limb activities (i.e. walking, climbing stairs) due to
Sarcopenia, among other issues. Therefore, the authors are developing an active exoskeleton whose sole
purpose is to assist the gait of an elderly person. The proposed system is based on a low-profile design,
allowing a smaller frame that allows the device to be worn beneath loose clothing, making it more desirable
to wear in public by reducing social awkwardness. This article shows the methodology used to determine
the actuation requirements for the exoskeleton. Two subjects performed a number of trials depicting daily
life activities in a biomechanics laboratory that acquires motion sensor and force-plate data. Each activity
was performed with additional weights to emulate the presence of an exoskeleton. The data was used in
a multibody simulation program (OpenSim) to determine the requirements (angular speed, torque) for the
actuation system in the exoskeleton.
1 INTRODUCTION
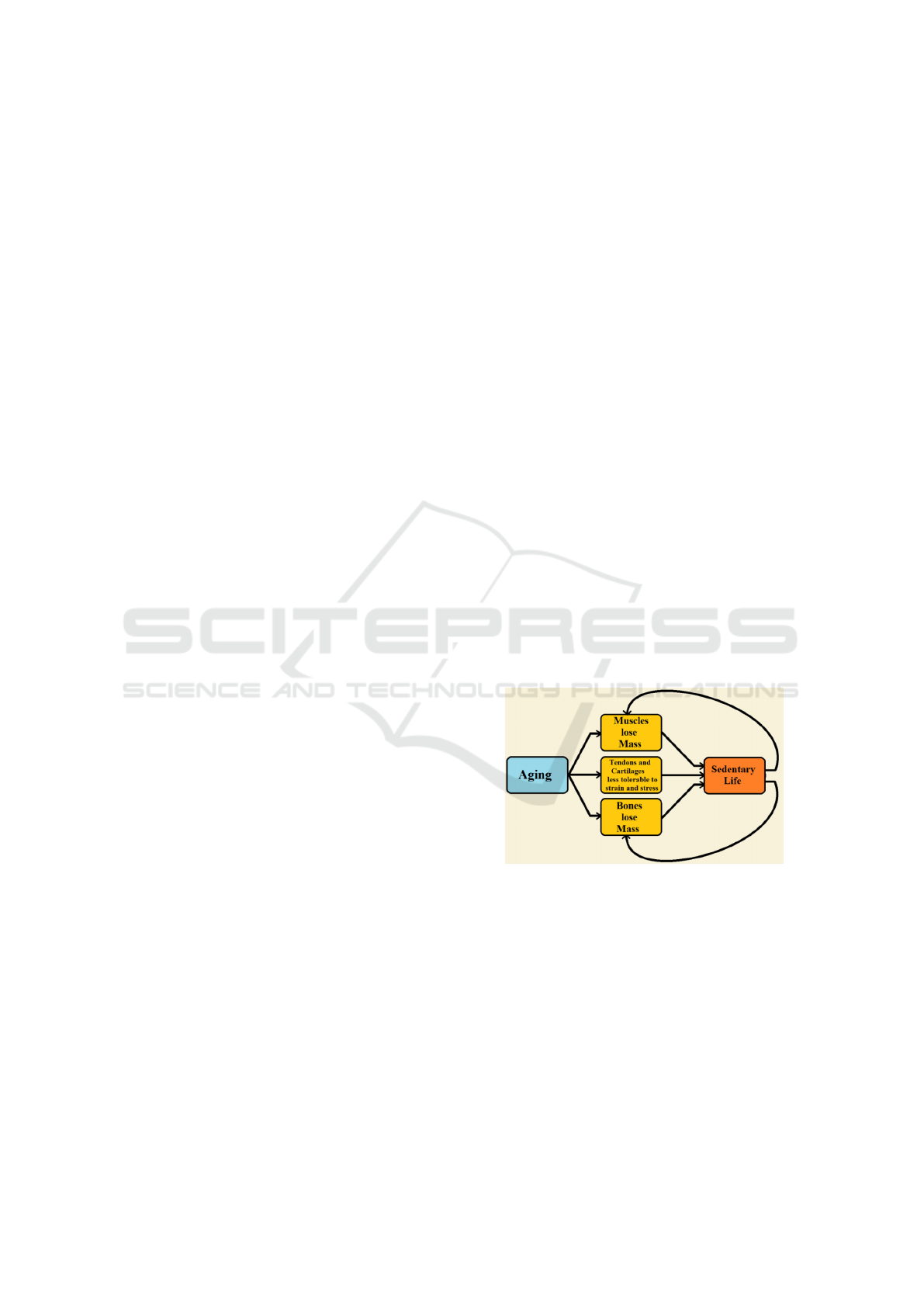
The ageing process in the human being results in sev-
eral changes in the musculoskeletal system. Among
other effects, the muscles shrink and lose mass i.e.
Sarcopenia, the number and size of muscle fibers de-
crease, the tendons and cartilages become less tolera-
ble to stress, the heart lowers the speed at which it can
pump blood and the bones lose mass, becoming more
prone to fractures (des, 2017). One of the first major
symptoms that appear with ageing is an irregular gait
and decreased gait speed (Riley et al., 2001).
The appearance of these symptoms usually results
from an increasingly sedentary life. Consequently,
a sedentary life will aggravate the aforementioned
changes in muscle and bone mass reductions. An ab-
sence of muscle stimulation results in loss of mus-
cle mass (Fiatarone and Evans, 1993) and the lack of
stress applied to human bones will prevent the piezo-
electric effect and mechanotransduction that main-
tains their density (Muscolino, 2016).
This results in a continuous self-feeding cycle
where the symptoms contribute directly to worsening
the conditions, as shown in Figure 1.
Figure 1: Cycle of symptoms and consequences during ag-
ing.
Additionally, adopting a sedentary life and moving
less frequently also decreases a person’s confidence
and motor control, increasing the chances of suffer-
ing from falls (Steadman et al., 2003). The lack of
an active life is also associated with social isolation
(Shankar et al., 2011). The end result is a lower qual-
ity of life that can result in depression and other psy-
chological disorders (Steptoe et al., 2013).
There are classical solutions for medium mobility
impairment, such as crutches and walkers. However
they occupy the upper limbs which results in a drastic
Pina, D., Gabriel, J. and Natal, R.
Motion Capture and MultiBody Simulations to Determine Actuation Requirements for an Assistive Exoskeleton.
DOI: 10.5220/0007403601830191
In Proceedings of the 12th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2019), pages 183-191
ISBN: 978-989-758-353-7
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
183
change of lifestyle and the misuse of these solutions
can cause injuries in the long term. Moreover, the
mobility walkers can be difficult to use within tight
spaces such as house interiors and bathrooms.
Due to an increase in life expectancy and decrease
of birth-rate, many developed countries are suffering
from an ageing population. Europe is the continent
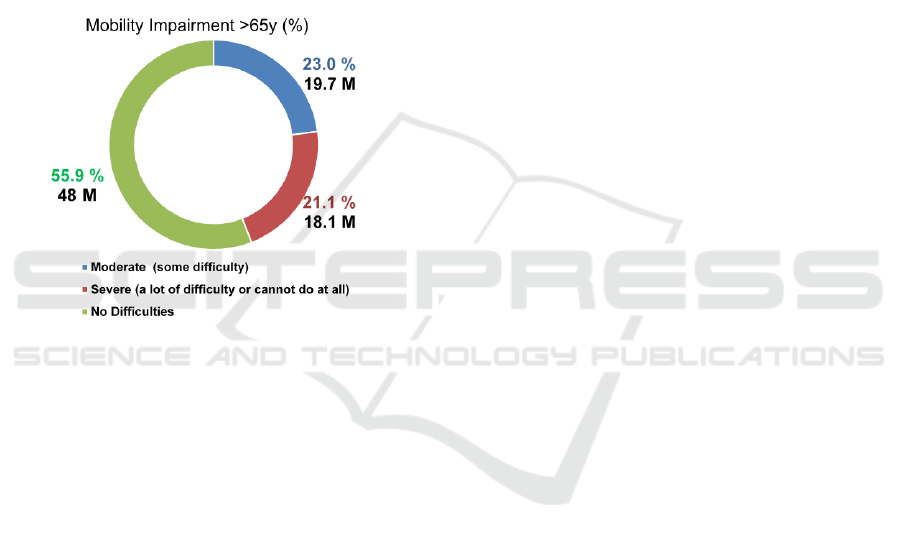
with the oldest population in the world. According
to a recent EUROSTAT report (EUROSTAT, 2014),
close to 20% of the European population is aged 65
or above. This results in almost 85 Million people in
that age bracket. Within these, 23% show a moderate
difficulty while walking and 21% show severe diffi-
culty, as seen in Figure 2.
Figure 2: Proportions and number of people (in millions) in
the European Union aged 65 years or older with moderate
or severe mobility impairment, according to a 2014 EURO-
STAT study (EUROSTAT, 2014).
EUROSTAT’s projections also show that, by 2040,
the people aged 65 or more will account to almost
one fourth of the population (EUROSTAT, 2017).
Therefore, the ratio between working age (18-
65 years old) and non-working age people would be
close to 2 to 1, which raises questions regarding the
sustainability of the European society (Commission,
2015). Due to this growing concern, many stud-
ies and initiatives (Walker, 2010), (HARTLAPP and
SCHMID, 2008), (Peine et al., 2014) have emerged in
order to extend the active age for European citizens.
Moreover, the age evolution projections would in-
crease the number of people aged 65 and over with
moderate mobility difficulties from 20 Million to over
35 Million.
It is therefore of the utmost importance to develop
solutions that contribute to solving the several prob-
lems of mobility within the 3rd and 4th ages, which
are aggravated by the ageing population in the Euro-
pean Union.
The proposal for the project is to develop a low-
profile active exoskeleton with a smaller range of uti-
lization than other active exoskeletons currently in the
market (such as the HAL (Sankai, 2006)), which is
uniquely to assist an elderly person’s gait and other
daily life activities such as climbing stairs.
By focusing on these activities, it is possible that
an exoskeleton that assists the lower limb activities
can be achieved with a small frame, which could go
unnoticed if the user is wearing loose clothes.
This paper refers to determining the actuation re-
quirements to assist the user of the exoskeleton being
developed.
An explanation for the methodology used to de-
sign the mechanical frame can be seen in (Pina et al.,
2018). Because the exoskeleton is aimed at helping
the movement in the lower limbs in people with a re-
duced degree of strength and mobility, the system pro-
poses to assist the lower limbs’ biomechanical forces
by 50%. The exoskeleton is planned to wear a total
of 20 kg, though it is designed to support itself by ex-
tending into the ground.
2 THEORETICAL FRAMEWORK
The exoskeleton is designed to support its own
weight. However, when the exoskeleton is equipped,
the combined system composed of human body and
exoskeleton is bound to demand additional torque
than the human body alone. This happens because the
total weight is higher, so the torque levels required to
perform daily life activities will also be greater.
The formula for the torque is expressed in equa-
tion 1:
τ = I × α (1)
Where τ is the torque in N.m, I is the moment of
inertia in kg.m
2
and α is the angular acceleration.
Given I as the moment of Inertia dependent on the
mass m and distance r to the pivot:
I = m × r
2
(2)
therefore, the torque τ for a given movement de-
pends on the mass m, distance r and angular acceler-
ation α:
τ = m × r
2
× α (3)
If the purpose of the exoskeleton is to provide
the same natural movements that are performed on a
daily basis, then the angular acceleration α is ideally
the same, and r is constant because the exoskeleton
adapts its length to the user’s limbs. Therefore, an
BIODEVICES 2019 - 12th International Conference on Biomedical Electronics and Devices
184
increment on the mass m of the bodies being moved
results in an increment on the torque τ.
So the sum of torques required to move a system
composed of human body and exoskeleton is greater
than the sum of torques required to move the human
body:
∑
τ
(humanwithexoskeleton)
>
∑
τ
(human)
(4)
The system proposes to assist the human move-
ment in daily activities in close to 50%, so the torque
provided by the exoskeleton actuators must be de-
signed to perform 50% of the system combined of
human with exoskeleton.
To achieve these values, a number of trials with
human subjects was made with no weights and then
with attached weights to emulate the weight of the
exoskeleton.
3 MOTION CAPTURE DATA
ACQUISISTION
The trials were performed in a laboratory capable of
doing motion capture through cameras and markers
placed on the subjects. There are also four force
plates that exist to determine the ground reaction
forces for gait trials, and are arranged according to
Figure 3.
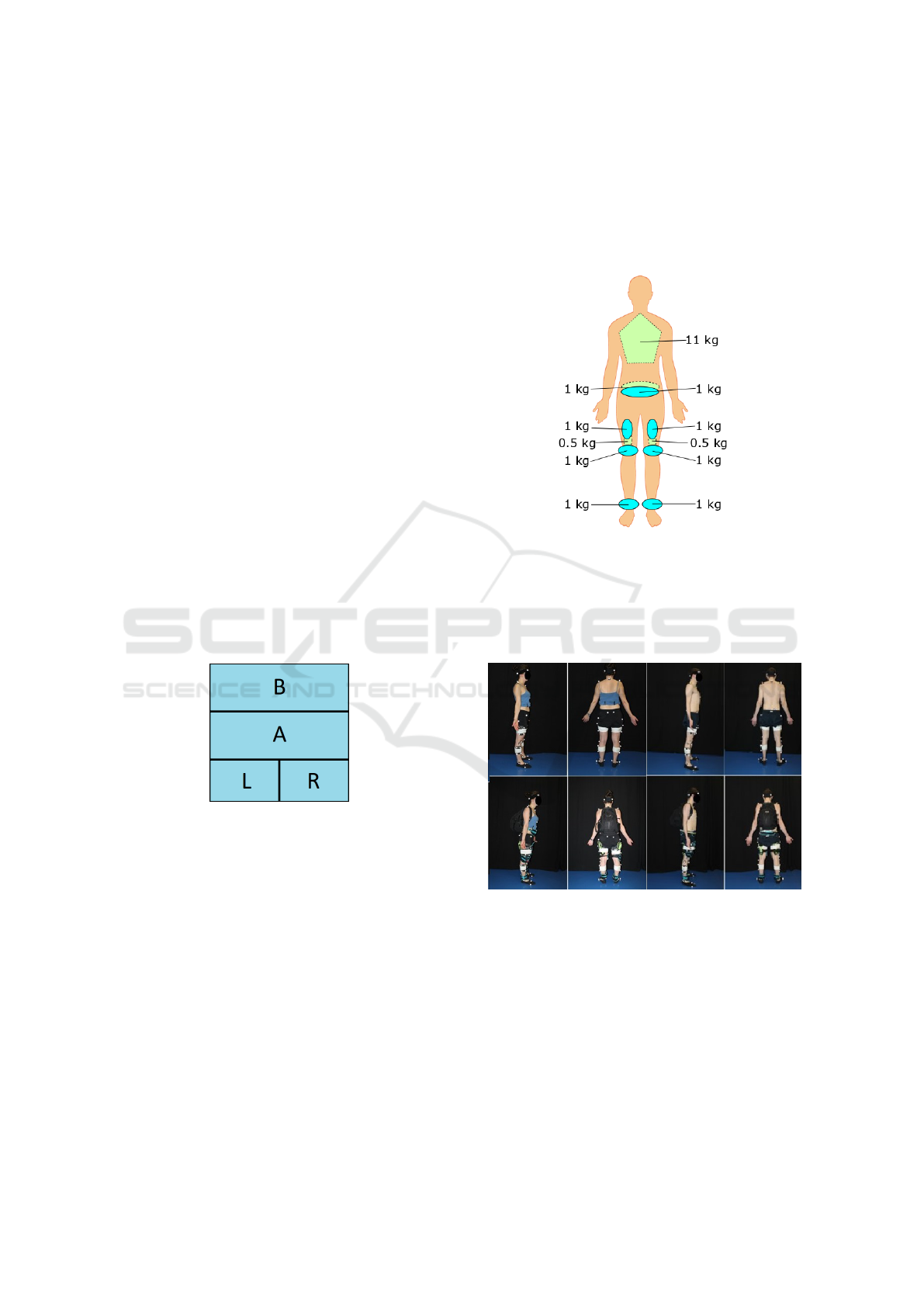
Figure 3: Arrangement of the force plates in the biomechan-
ics laboratory.
During a gait trial, if the first force plate to be stepped
on is plate ”L”, then it is assumed that plate A will
be stepped on by the right foot and plate B will be
stepped on by the left foot. This arrangement allows
the system to acquire the ground reaction forces for a
full gait cycle.
The trials were performed by two subjects: a fe-
male with a weight of 52.4 kg and height of 1.52 m,
and a male with a weight of 63.8 kg and a height of
1.73 m.
As seen in (Pina et al., 2018), the mechanical
frame of the exoskeleton weights close to 8 kg. In
order to include the weight of the backpack with ac-
tuators, batteries and other subsystems, the exoskele-
ton simulation trials were performed with the subjects
carrying an additional weight of 20 kg. The trials
were performed with a weight distribution similar to
the exoskeleton frame, in order to approach the dy-
namic behavior of the exoskeleton. The subjects at-
tached different weights throughout the lower limbs
and its distribution can be seen in Figure 4.
Figure 4: Distribution of the attached weights to approach
the weight dynamics of the exoskeleton developed.
Pictures of the female and male subjects with and
without the attached weights can be seen in Figure
5.
Figure 5: Pictures of the female and male subjects. On top,
with normal clothing and no added weights. On the bottom,
with the attached weights and backpack.
The subjects performed the trials described in Figure
6. The sitting and standing results are not considered
in this work because they did not contribute to the end
results.
Motion Capture and MultiBody Simulations to Determine Actuation Requirements for an Assistive Exoskeleton
185

Figure 6: Diagram of the trials performed for each subject.
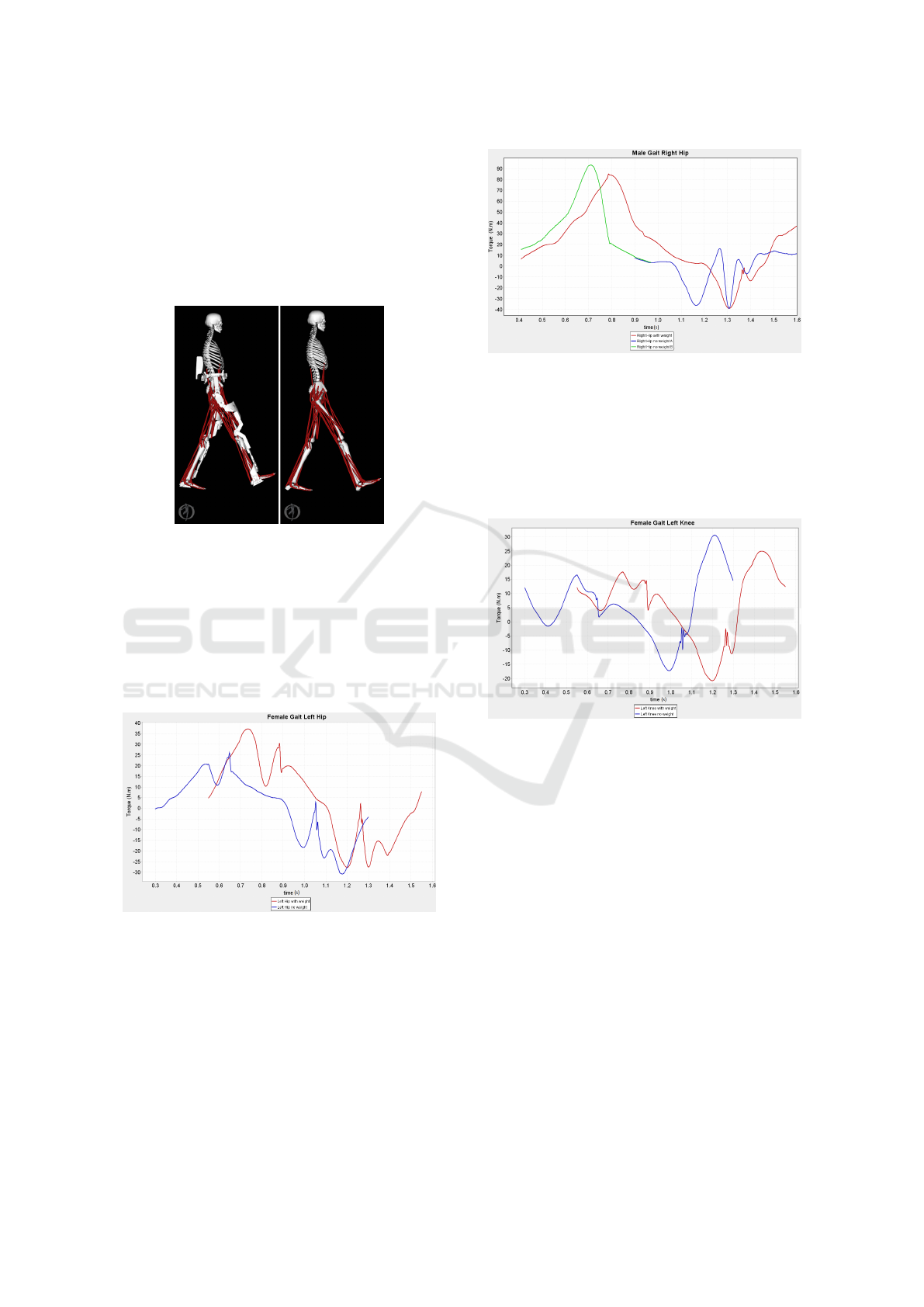
Figure 7 shows a gait trial performed by the female
subject, with and without the additional weights.
Figure 7: Pictures of the female subject performing gait tri-
als with normal clothing on the left and attached weights on
the right.
To perform the stair trials, a set of mock-up stairs was
built with brick and wood to provide a safe method
to simulate stair ascend and descend. The stair climb
and descend cycles have the same description as gait
cycles. Each leg performs a stance phase (between
the foot making contact with one step and lifting off
to the next step) and swing phase (between the foot
lifting off one step and reaching the next). There
are two mock-up steps: with a height of 40 cm and
a second with a height of 80 cm. Although these
mock-up stairs are higher than usual stairs in modern
houses, this way they present a ”worst-case scenario”,
as higher stairs are prevalent in older houses or pub-
lic buildings. The lower set of stairs was placed in
force plate A (from Figure 3) and the taller set was
placed in force place B. The acquisition software for
the force plates was then tuned to subtract the weight
of the mock-up steps. To complete the cycle after the
taller step, there was a wooden block to complete the
the ascend or initiate the descend movements. The
wooden block was not placed over force plates.
In order to organize the final simulation results,
the subjects were instructed to climb the mock-up
stairs with the right leg on the lower step, and then
to descend the stairs with the right leg first.
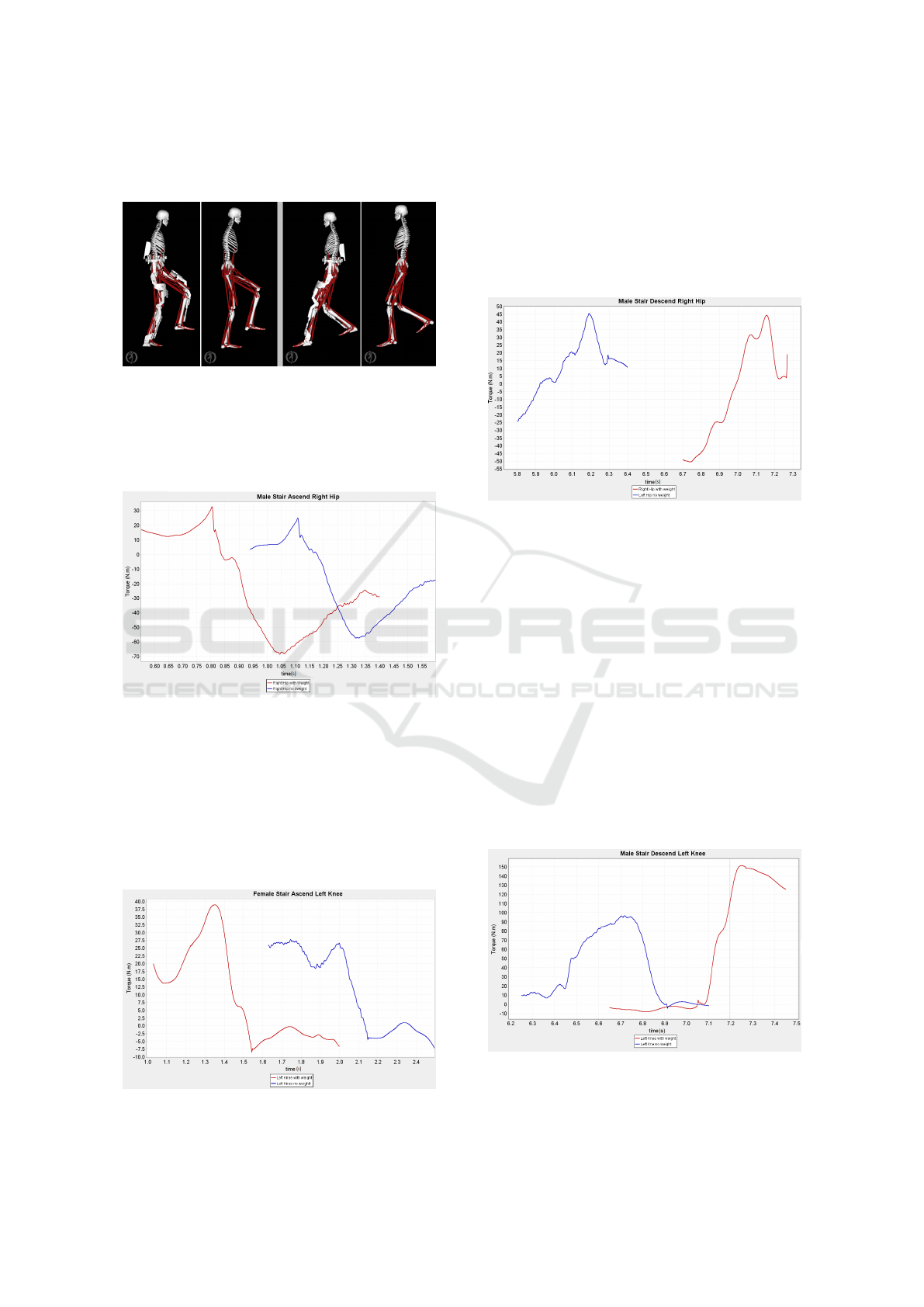
Figure 8 shows pictures of the tests for stair ascend
and stair descend.
Figure 8: Pictures of the female subject performing stair
trials with normal clothing on the left and attached weights
on the right. The top two pictures show stair climbing while
the bottom pictures show stair descending.
4 OpenSIM WORKFLOW
The software used to perform the multibody simula-
tions is the OpenSim 3.3 Simulation Toolkit devel-
oped by Scott Delp (Delp et al., 2007). The software
is open source and is capable of performing multi-
body simulations for biomechanical applications. The
muskuloskeletal tridimensional model used for the
simulations is the reference Gait2392 (Delp et al.,
1990), which is based on anatomical data provided
by several studies (Friederich and Brand, 1990), (Hoy
et al., 1990). Gait2392 has 23 degrees of motion and
was designed to perform lower limb simulations.
OpenSim takes the marker data and performs In-
verse Kinematics to translate into motion data for the
Gait2392 model, in the form of angular position per
joint through time. There is also a Scaling func-
tion, which uses marker data and the subject’s weight
to customize the Gait2392 model. With the scaled
model, motion data and ground reaction forces from
the force plates, it is possible to perform Inverse Dy-
namics which provides the torque values for each
joint.
However, the Inverse Dynamics procedure in-
duces virtual residual actuators (consisted of torques
and forces applied to the pelvis) to help stabilize the
model due to data acquisition errors in the motion
BIODEVICES 2019 - 12th International Conference on Biomedical Electronics and Devices
186
capture system and force plates. In complex models
like the Gait2392 using complex motions, the resid-
ual actuators often assume large values, which signif-
icantly reduces the validity and precision of the cal-
culated torques.
The Residual Reduction Algorithm (RRA) uses
the Computer Muscle Control (CMC) algorithm to
control the torque applied by point actuators placed
in each joint. The CMC algorithm was developed
to calculate muscle activations for any given move-
ment through power-saving paths, as a biomimetic ap-
proach (Seth et al., 2011). At the same time, the RRA
makes slight modifications the motion data and pro-
poses mass changes to each body in order to reduce
the values of the residual actuators.
Figure 9 shows the regular workflow for perform-
ing simulations using RRA:
Figure 9: Workflow for the OpenSim Simulation Toolkit to
achieve precise values for joint torques using RRA.
According to the software developers, the results are
only valid if the values for residual forces and er-
ror displacements are below pre-defined thresholds.
Therefore, the results obtained in this article were
achieved by tuning the simulation timings to fit the
thresholds for the residual actuators.
For performing the simulations with the additional
weights, the exoskeleton components described in
(Pina et al., 2018) were adapted to the body measure-
ments of the male and female subjects. Afterwards,
the exoskeleton components were ported and adapted
into the Gait2392 model with the correct values for
geometry, mass, center of mass and inertia. The
weight distribution is different between the weights
attached to the subjects in the trials and the virtual
exoskeleton. To compensate for this difference, the
RRA procedure for mass changes was repeated for
each virtual model until the proposed changes were
minimal. At the moment of writing, the mass change
procedure is only possible through command line and
is not available through the software’s GUI.
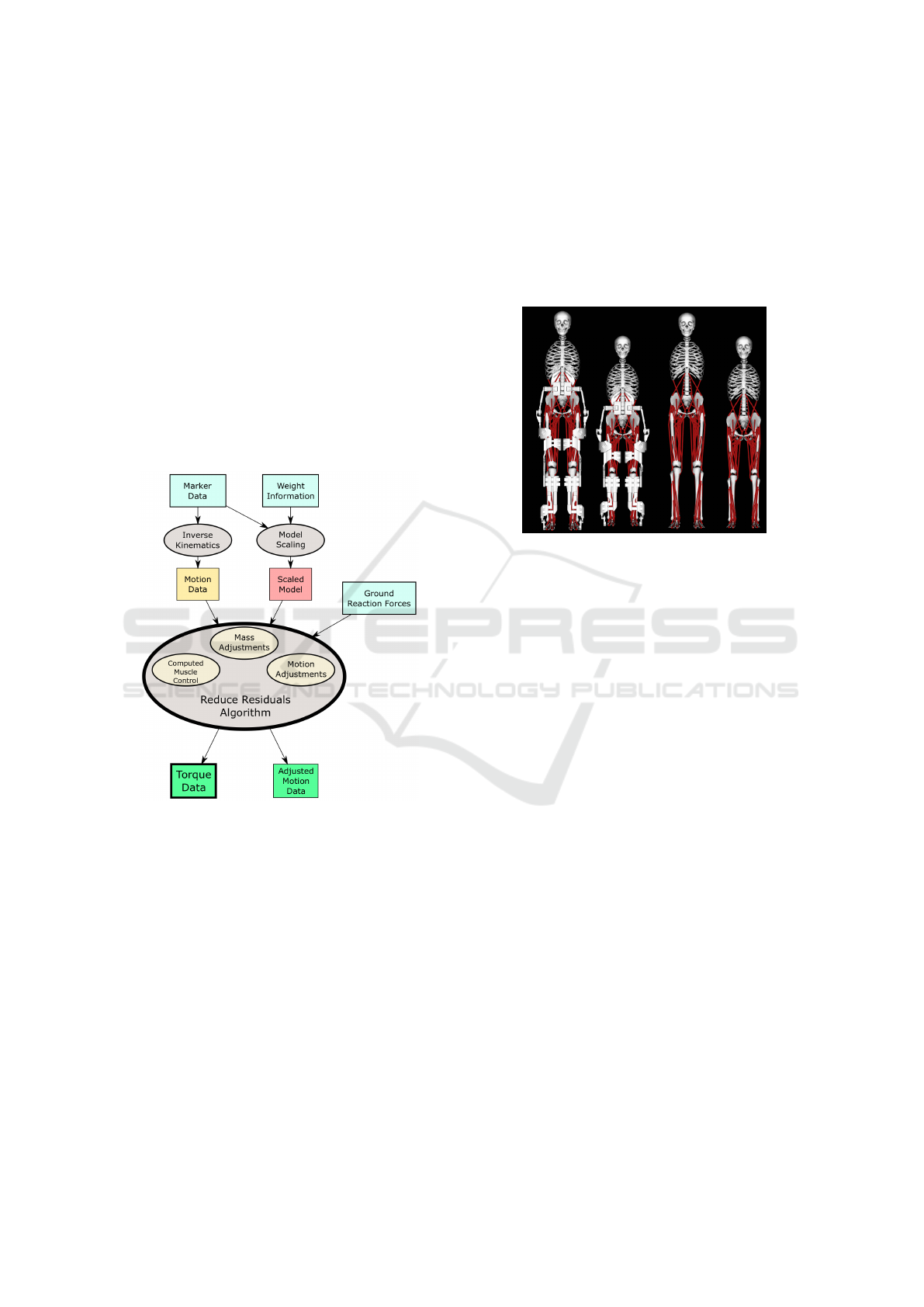
The models used the OpenSim simulations can be
seen in Figure 10.
Figure 10: From left to right: male subject with exoskele-
ton, female subject with exoskeleton, male subject without
exoskeleton, female subject without exoskeleton.
5 OpenSIM RESULTS
The results presented in this section show the torque
values for the hip and knee joints for each activity and
for each subject. These joints are planned to be actu-
ated and assisted by the exoskeleton. For some tri-
als, the ankle torque is also shown. The ankle joint is
not actuated by the system, but the torque differences
may be a concern. However, a large proportion of
the ankle plantar flexion torque originates from pas-
sive elastic forces from extending the Soleus muscle.
Also, many types of footwear limit the plantar flexion
so its importance in this system is considered partially
reduced. Each result graphic shows a joint torque
from a trial with weight and another joint torque from
the equivalent trial without weight, to provide better
means of comparison.
The OpenSim’s graphics creator utility defines a
positive torque for hip flexion and negative torque for
hip extension. For the knee, flexion is negative and
extension is positive.
In some results, the same trial for the same joint
is split into two simulations. The reason for this is
because in some simulations the values for the resid-
ual actuators and displacement errors would start to
increase.
In the following torque graphics, the blue and
green lines show a result without additional weight
Motion Capture and MultiBody Simulations to Determine Actuation Requirements for an Assistive Exoskeleton
187
and in red a result with additional weight.
5.1 Gait Results
The following results were obtained through the
OpenSIM RRA simulations with data taken from the
gait trials. A screenshot of the male model with and
without the exoskeleton can be observed in Figure 11
Figure 11: Screenshot of the simulation with the male
model with the exoskeleton on the left and without the ex-
oskeleton on the right.
Hip Joint
Figure 12 shows the torque results for the hip joint
flexion/extension in the female subject, during the
gait trials. The higher positive torque values in the
hip flexion correspond to the beginning of the swing
phase.
Figure 12: Hip Extension/Flexion torque values for the gait
trials with the female subject.
With the female subject, the additional weight causes
a difference of 12 N.m in the left hip flexion. Hip
extension (negative values) is showing larger torque
values without weight. A possible explanation for this
is the subject assuming a faster walking pace.
Figure 13 shows the same trials for the male sub-
ject.
The male subject shows a 12 N.m difference in the
right hip flexion.
Figure 13: Hip Extension/Flexion torque values for the gait
trials with the male subject.
Knee Joint
The torque results for the female subject’s knee joints
during gait are shown in Figure 14. The higher pos-
itive torque values in the knee correspond to the mo-
ment of heel contact.
Figure 14: Knee Extension/Flexion torque values for the
gait trials with the female subject.
The knee results in the female trial do not show signif-
icant torque differences, and the same was observed
with the male trials.
5.2 Stair Ascend and Descend Results
The stair ascend and descend simulations could not
be resolved for a full ”stair” cycle. Due to the gener-
ally increased complexity of the movements, the sim-
ulation periods are reduced to keep the residual actu-
ator values within the pre-established thresholds de-
termined by OpenSim’s developers. Therefore, it is
expected for the joint results in one side to match half
a cycle and the other side to match the other half (e.g.
left leg joints show the swing phase and the right leg
joints show the stance phase). The following graph-
ics show the results with a larger difference observed
between trials with and without weight.
Screenshots of the male model with and without
BIODEVICES 2019 - 12th International Conference on Biomedical Electronics and Devices
188
the exoskeleton during the simulations with stairs can
be observed in Figure 15
Figure 15: Screenshot of the simulation with the male
model with and without the exoskeleton while climbing
stairs on the left and descending stairs on the right.
Hip Stair Ascend
Figure 16 shows the hip results for the male subject.
Figure 16: Hip Extension/Flexion torque values for the stair
ascend trials with the male subject.
The maximum torque values for the male subject’s
right hip shows a 10 N.m difference in extension dur-
ing the stance phase.
Knee Stair Ascend
Figure 17 shows the knee torque values for stair as-
cend with the female subject.
Figure 17: Knee Extension/Flexion torque values for the
stair ascend trials with the female subject.
The weight trials show a 22 N.m increase in max-
imum torque for knee extension during the swing
phase with the left knee.
Hip Stair Descend
Figure 18 shows the hip joint torque values for the
male subject during the stair descend trial.
Figure 18: Hip Extension/Flexion torque values for the stair
descend trials with the male subject.
The male subject results show a 20 N.m difference in
the right hip extension.
Knee Stair Descend
The stair descend trial with the knee joint shows the
largest torque differences between the results with and
without weight. The knee extension peak values cor-
respond to the moment when the subjects’ feet make
contact with the lower step. This moment matches
the highest torque observed in any of the movements
studied in the trials.
Figure 19 shows the same trials for the male sub-
ject. The knee torque differences with and without
weight are similar between the male and female sub-
ject. The male subject shows a difference of 50 N.m
in the left knee.
Figure 19: Left Knee Extension/Flexion torque values for
the stair descend trials with the male subject.
Motion Capture and MultiBody Simulations to Determine Actuation Requirements for an Assistive Exoskeleton
189

6 CONCLUSIONS
Although the subjects were instructed to perform the
same movements, the additional weights created a
difference in the body dynamics, and therefore the
movements themselves. For this reason, some tests
show large differences in torque values between trials
with and without additional weight.
The Exoskeleton proposes to assist the move-
ment in the daily activities by 50%. To achieve
this, the maximum torque values from the actua-
tion system should be able to perform 50% of the
maximum torque values for a given movement with-
out the weights (τ(t
max
)
normal bod y
), plus the differ-
ence in torque for the same movement with the
weights(∆τ(t
max
)
body with exoskeleton
).
Therefore:
τ(max)
actuationsystem
=
= τ(t
max
)
normal bod y
× 50%)+∆τ(t
max
)
body with exoskeleton
(5)
The aforementioned torque values and torque differ-
ences are observed in the following trials:
Hip Extension:
Stair ascend with male subject: 60 N.m without
weight and ∆τ 10 N.m.
τ(max)
actuationsystem
= (0.5 × 60) + 10 = 40 N.m
Hip Flexion:
Stair Descend with male subject: 50 N.m without
weight and ∆τ 20 N.m.
τ(max)
actuationsystem
= (0.5 × 50) + 20 = 45 N.m
Knee Extension:
Stair Descend with male subject: 100 N.m without
weight and ∆τ 50 N.m.
τ(max)
actuationsystem
= (0.5 × 100) + 50 = 100 N.m
Knee Flexion:
Gait with male subject: 27 N.m without weight and
∆τ 3 N.m.
τ(max)
actuationsystem
= (0.5 × 27) + 3 = 16.5 N.m
The largest requirement for torque assistance from the
exoskeleton is the knee extension with a value of 100
N.m. Given the large difference between the torque
requirement for this specific movement (knee joint
in stair descend) and the torque requirements for the
other movements, the 50% assistance value may not
be met in this case, or additional types of solutions
may be studied. For example, since the knee exten-
sion during stair descend is performing negative work,
the same torque can be obtained through a control-
lable brake.
With this data, it will be possible to develop an ac-
tuation system that is neither under or overengineered
for the exoskeleton. This process can therefore be
able to save time and costs during the exoskeleton de-
velopment.
ACKNOWLEDGEMENTS
The authors would like to thank the “Minist
´
erio da
Ci
ˆ
encia, Tecnologia e Ensino Superior – Fundac¸
˜
ao
para a Ci
ˆ
encia e a Tecnologia, Portugal” for the
funding provided by the research project “LAETA –
UID/EMS/50022/2013”.
REFERENCES
American academy of orthopaedic surgeons, “ef-
fects of aging”. as of 2017 available at
http://orthoinfo.aaos.org/topic.cfm?topic=A00191.
Commission, E. (2015). The 2015 ageing report: Economic
and budgetary projections for the 28 eu member states
(2013-2060). http://ec.europa.eu.
Delp, S., Loan, J., Hoy, M., Zajac, F., Topp, E., and Rosen,
J. (1990). An interactive graphics-based model of the
lower extremity to study orthopaedic surgical proce-
dures. IEEE Transactions on Biomedical Engineering,
37(8):757–767.
Delp, S. L., Anderson, F. C., Arnold, A. S., Loan, P.,
Habib, A., John, C. T., Guendelman, E., and The-
len, D. G. (2007). OpenSim: Open-source software
to create and analyze dynamic simulations of move-
ment. IEEE Transactions on Biomedical Engineering,
54(11):1940–1950.
EUROSTAT (2014). Physical and sensory functional limi-
tations by sex, age and educational attainment level.
EUROSTAT (2017). Population structure and ageing. ISSN
2443-8219.
Fiatarone, M. A. and Evans, W. J. (1993). 11 the etiology
and reversibility of muscle dysfunction in the aged.
Journal of Gerontology, 48(Special):77–83.
Friederich, J. A. and Brand, R. A. (1990). Muscle fiber ar-
chitecture in the human lower limb. Journal of Biome-
chanics, 23(1):91–95.
HARTLAPP, M. and SCHMID, G. (2008). Labour market
policy for ‘active ageing’ in europe: Expanding the
options for retirement transitions. Journal of Social
Policy, 37(03).
Hoy, M. G., Zajac, F. E., and Gordon, M. E. (1990). A
musculoskeletal model of the human lower extremity:
the effect of muscle, tendon, and moment ann on the
moment-angle relationship of musculotendon actua-
tors at the hip, knee, and ankle. Journal of Biome-
chanics.
BIODEVICES 2019 - 12th International Conference on Biomedical Electronics and Devices
190

Muscolino, J. E. (2016). Kinesiology: The Skeletal System
and Muscle Function, volume Chapter 3.9 “Effects of
Physical Stress on Bone”, pp. 47-49. C V MOSBY
CO.
Peine, A., Rollwagen, I., and Neven, L. (2014). The
rise of the “innosumer”—rethinking older technology
users. Technological Forecasting and Social Change,
82:199–214.
Pina, D. S., Fernandes, A. A., Jorge, R. N., and Gabriel, J.
(2018). Designing the mechanical frame of an active
exoskeleton for gait assistance. Advances in Mechan-
ical Engineering, 10(2):168781401774366.
Riley, P. O., Croce, U. D., and Kerrigan, D. C. (2001). Ef-
fect of age on lower extremity joint moment contribu-
tions to gait speed. Gait & Posture, 14(3):264–270.
Sankai, Y. (2006). Leading edge of cybernics: Robot suit
HAL. In SICE-ICASE International Joint Conference.
IEEE.
Seth, A., Sherman, M., Reinbolt, J. A., and Delp, S. L.
(2011). OpenSim: a musculoskeletal modeling and
simulation framework for in silico investigations and
exchange. Procedia IUTAM, 2:212–232.
Shankar, A., McMunn, A., Banks, J., and Steptoe, A.
(2011). Loneliness, social isolation, and behavioral
and biological health indicators in older adults. Health
Psychology, 30(4):377–385.
Steadman, J., Donaldson, N., and Kalra, L. (2003). A ran-
domized controlled trial of an enhanced balance train-
ing program to improve mobility and reduce falls in
elderly patients. Journal of the American Geriatrics
Society, 51(6):847–852.
Steptoe, A., Shankar, A., Demakakos, P., and Wardle, J.
(2013). Social isolation, loneliness, and all-cause mor-
tality in older men and women. Proceedings of the
National Academy of Sciences, 110(15):5797–5801.
Walker, A. (2010). The emergence and application of active
aging in europe. In Soziale Lebenslaufpolitik, pages
585–601. VS Verlag f
¨
ur Sozialwissenschaften.
Motion Capture and MultiBody Simulations to Determine Actuation Requirements for an Assistive Exoskeleton
191
