
SOCRatES: A Database of Realistic Data for SOurce Camera
REcognition on Smartphones
Chiara Galdi
1
, Frank Hartung
2
and Jean-Luc Dugelay
1
1
Department of Digital Security, EURECOM, 450 Route des Chappes, 06410 Biot, France
2
Department of Multimedia Technology, FH Aachen, Eupener Str. 70, 52066 Aachen, Germany
Keywords:
Sensor Pattern Noise, PRNU, Source Camera Identification, Video, Smartphone, Database.
Abstract:
SOCRatES: SOurce Camera REcognition on Smartphones, is an image and video database especially designed
for source digital camera recognition on smartphones. It answers to two specific needs, the need of wider
pools of data for the developing and benchmarking of image forensic techniques, and the need to move the
application of these techniques on smartphones, since, nowadays, they are the most employed devices for
image capturing and video recording. What makes SOCRatES different from all previous published databases
is that it is collected by the smartphone owners themselves, introducing a great heterogeneity and realness in
the data. SOCRatES is currently made up of about 9.700 images and 1000 videos captured with 103 different
smartphones of 15 different makes and about 60 different models. With 103 different devices, SOCRatES is
the database for source digital camera identification that includes the highest number of different sensors. In
this paper we describe SOCRatES and we present a baseline assessment based on the Sensor Pattern Noise
computation.
1 INTRODUCTION
It is a fact that, nowadays, the most employed de-
vices for recording videos and capturing photos are
smartphones. The high resolution provided by their
embedded acquisition sensors allows the recording
of amateur videos or pictures of good quality. This
has spread their use for collecting souvenir photos,
replacing the classic cameras, but also in collecting
covert videos and illegal contents, including pedo-
pornography, bullying, and illegal races. In the latter
case, it is extremely important to have tools to reliably
associate an image or a video with illegal content to
the correct source camera. This research field is re-
ferred to as source digital camera identification.
For the aforementioned reasons, the authors
present in this paper a novel database, namely
SOCRatES: SOurce Camera REcognition on Smart-
phones. This image and video database is espe-
cially designed for the purpose of development and
benchmarking of image forensic techniques on smart-
phones, in particular for, but not limited to, the source
digital camera identification problem.
1.1 Source Digital Camera
Identification
The problem of source digital camera identification
has been addressed in different ways during the last
decades. Three main categories of approaches can be
distinguished:
The first category consists in approaches based
on analysing the artefacts produced in the acquisition
phase. The lens aberration is an optical property that
causes light passing through a lens to be spread out
over some region of space rather than focused to a
point. The consequent radial distortion causes straight
lines to appear as curved on the output image. The im-
age distortion is analysed to identify the source cam-
era. This approach was first proposed by Choi et al. in
(Choi et al., 2006). Imperfections in the lens may also
produce chromatic aberration. The latter has been
studied by Van and al. in (Van et al., 2007). However,
cameras of the same model or mounting the same lens
system will produce the same distinctive pattern. This
method is thus suitable for camera model identifica-
tion but not for distinguishing cameras of the same
model.
The second category includes approaches able to
uniquely link the captured image to its source cam-
648
Galdi, C., Hartung, F. and Dugelay, J.
SOCRatES: A Database of Realistic Data for SOurce Camera REcognition on Smartphones.
DOI: 10.5220/0007403706480655
In Proceedings of the 8th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2019), pages 648-655
ISBN: 978-989-758-351-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

era as it analyses the sensor imperfections, also called
sensor noise, that are different for each camera even
if they are of the same make and model. The sensor
noise is the result of three main components: pixel de-
fects, fixed pattern noise (FPN), and Photo Response
Non Uniformity (PRNU). Two methods fall in this
category. The analysis of pixel defects consists in ex-
amine the defects of Charge-Coupled Device (CCD)
sensors, including point defects, hot point defects,
dead pixel, pixel traps, and cluster defects. To extract
the pixel defect pattern, pictures of a black surface
must be taken. Some limitations of this method in-
clude the sensor sensitivity to temperature that may
affect the extracted pattern, the image content can
make the pattern less visible, the pattern changes with
time as the sensor ages (e.g. the number of defective
pixels increases). Finally, for some cameras it is pos-
sible that they do not have any defective pixels and
thus a distinctive pattern. Such approach is presented
in (Geradts et al., 2001) by Geradts et al.
The second method in the sensor imperfections
category is also the one dealt with in this article. The
sensor pattern noise (SPN) is a distinctive pattern
due to imperfections in the silicon wafer during the
sensor manufacturing, different even among cameras
of the same model. These imperfections imply that
the pixels have different sensitivities to light. A dis-
tinctive pattern can be extracted by analysing the im-
age in the frequency domain and by selecting those
frequencies that are more likely to be associated with
the sensor noise. The method was first presented by
Lukas et al. in (Lukas et al., 2006) and is described
in more details in Section 3. This method is widely
adopted and research is still very active in this field,
as there are some open issues: the model assumes that
the reference pattern and the test image have the same
size, thus the method fails to predict the source cam-
era of cropped images; strong image or video com-
pression, such as that applied to media files when up-
loaded to social networks, impact the noise pattern
and produce a loss of accuracy.
The third category includes methods based on the
analysis of the traces left on the image by the process-
ing performed by the imaging device. The camera
colour filter array (CFA) is a mosaic of tiny colour fil-
ters placed over the pixel sensors of an image sensor
to capture colour information. The CFA interpola-
tion process leaves a trace on the image and different
approaches have been developed to extract a distinc-
tive pattern from it. The methods include: to exam-
ine the traces of colour interpolation in colour bands,
quadratic pixel correlation model, and binary similar-
ity measures. As different cameras can adopt the same
CFA interpolation, these approaches are suitable for
make or model recognition rather than to uniquely as-
sociate the image to its source camera.
The works presented in (Lanh et al., 2007) and
(Redi et al., 2011) provide an extensive survey on dig-
ital camera image forensics.
1.2 Databases for Source Digital
Camera Identification
A broad range of scientific literature exists in the field
of the digital image forensic. However, there are very
few publicly available database especially designed
for source camera identification.
The first large and publicly available image
database has been proposed in 2010, namely the
‘Dresden Image Database’ (Gloe and B
¨
ohme, 2010).
This database is composed by more than 14,000 im-
ages acquired with 73 different cameras of 25 differ-
ent models and is intended for developing and bench-
marking of camera model identification techniques. It
has been used in a number of works, including the re-
cent work on camera model identification based on
local features by Marra et al. (Marra et al., 2017), the
work presented by Deng et al. in (Deng et al., 2011)
where the authors propose a new technique based on
the approximation of the Auto-White Balance algo-
rithm used inside cameras. It has also been used in
combination with a custom-made dataset in order to
have a wider benchmark, as in (Lin and Li, 2016).
The Dresden Image Database has been also employed
by Gloe et al. (Gloe et al., 2012) to analyse unex-
pected artefacts in PRNU-based digital camera iden-
tification.
Another small database for blind source cell-
phone model identification has been presented in
2008 by C¸ eliktutan et al. in (C¸ eliktutan et al., 2008).
It contains more than 3.000 pictures collected using
17 mobile phones of 15 different models. In a work
proposed by Farinella et al. (Farinella et al., 2015)
and published in 2015, this database is used in com-
bination with the ‘Dresden Image Database’ to com-
pare two known techniques for source camera iden-
tification, namely the one based on sensor pattern
noise extraction and the approach based on the anal-
ysis of the specific colour processing and transfor-
mations operated by the camera before storing. The
fact that a work presented in 2015 had to employ
two databases collected in 2008 and in 2010, brings
into focus the necessity of having more and up-to-
date image databases. This is the case in particu-
lar for image databases collected with mobile phones,
since smartphone features rapidly improve over time,
for example, in the database collected in 2008, the
maximum capturing resolution is of 640 × 480 pix-
SOCRatES: A Database of Realistic Data for SOurce Camera REcognition on Smartphones
649

els while in SOCRatES the maximum resolution is of
5344 × 3006 pixels.
More recently, the VISION database has been re-
lease and presented in (Shullani et al., 2017). The
database is composed by 34,427 images and 1914
videos, both in the native format and in their social
version (Facebook, YouTube, and WhatsApp), from
35 portable devices of 15 major brands. It has been
recently used to test CNN-based techniques and to in-
vestigate their vulnerability to adversarial attacks for
camera model identification (Marra et al., 2018).
The advantages offered by SOCRatES are two-
folded, it currently offers the highest number of differ-
ent sensors employed for data collection, and it is the
only database presented so far for digital source cam-
era identification collected by the smartphone owners
themselves, introducing a great heterogeneity and re-
alness in the data.
SOCRatES is particularly designed for testing ap-
proaches based on the Sensor Pattern Noise extrac-
tion, e.g. the technique firstly presented by Lukas et
al. in (Lukas et al., 2006). It is currently made up
of about 9.700 images and 1000 videos captured with
103 different smartphones of 15 different makes and
about 60 different models.
The use of digital image forensic techniques is
not limited to the investigation of crime, it has been
also applied for user authentication by combining
the smartphone identification with the user biomet-
ric recognition, in order to provide an easy-to-use and
reliable authentication system. In (Galdi et al., 2016),
smartphone identification is combined with iris recog-
nition. The same authors have presented more re-
cently, a method combining smartphone identification
and face recognition using the SOCRatES database
(Galdi et al., 2018).
In addition to photos, SOCRatES includes a set
of video clips collected with each different device.
The problem of source digital camera identification
from strongly compressed videos, as the ones gener-
ated by smartphones, is very tough (Chuang et al.,
2011) since the sensor pattern noise is strongly im-
pacted by video compression. Also, compared to pho-
tos taken with the same device, the recorded scene is
somehow cropped. This is why videos are included in
SOCRatES, in order to provide a benchmark for test-
ing techniques for source digital camera identification
from videos on smartphones.
SOCRatES is made freely available to other re-
searchers for scientific purposes at the following
URL: http://socrates.eurecom.fr/.
The reminder of this paper is organized as follows:
in section 2 the SOCRatES database is described, in-
cluding its acquisition protocol, structure and annota-
Figure 1: Guidelines for collecting uniform colour back-
ground pictures.
Figure 2: Guidelines for collecting pictures avoiding copy-
right and privacy violations. Some pictures have been ob-
scured here for copyright reasons.
tion. Section 3 presents a preliminary analysis of the
database, including source camera identification per-
formances. Section 4 concludes the paper.
2 DATABASE DESCRIPTION
SOCRatES is currently made up of about 9.700 im-
ages and 1000 videos captured with 103 different
smartphones of 15 different makes and about 60 dif-
ferent models. The acquisition has been performed
in uncontrolled conditions. In order to collect the
database, many people were involved and asked to use
their personal smartphone to collect a set of pictures.
Instructions were given to the participants and they
collected the set of pictures in complete autonomy.
The reason behind this choice is, on the one hand,
to collect a database of heterogeneous pictures and
to maximize the number of devices employed, and,
on the other hand, to carefully replicate the real sce-
nario of application of the techniques that will use this
database as benchmark. In fact, by selecting a ”pop-
ulation” of smartphone users and letting them cap-
turing the pictures, we automatically select a set of
smartphones representing the current market.
Table 1 summarizes the main features of the de-
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
650
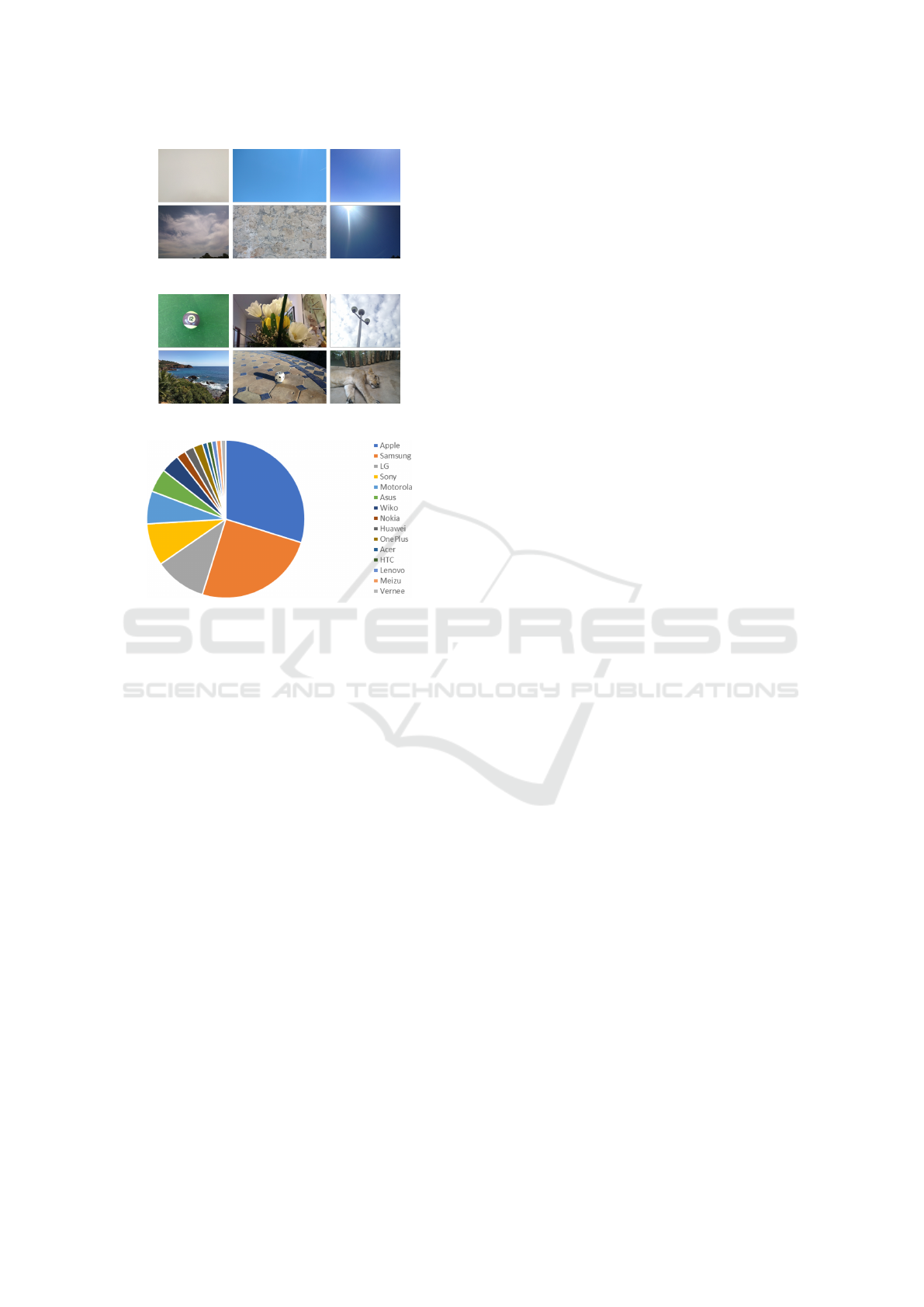
Figure 3: Sample images from the background pictures set.
Figure 4: Sample images from the foreground pictures set.
Figure 5: Smartphone brands composing SOCRatES.
vices composing the database.
2.1 Acquisition Protocol
Participants are asked to use their personal smart-
phone and to collect a total of 100 photos and 10
videos. Among the 100 captured pictures: 50 have
to be photos of the blue sky, or, in its absence, of an-
other uniform colour surface, e.g. a white wall; 50
pictures have to portray any kind of scene, avoiding
privacy and copyright sensitive subjects, e.g. faces,
people, copyrighted buildings, license plates, brands,
etc. In Fig. 1 and Fig. 2 an example of the illustrated
indications given to the participants as a guideline for
capturing the photos is shown. All pictures are then
checked by the database owners to ensure that they
do not violate privacy and copyright. All volunteers
are informed about the purpose of the data collection
and assignments of copyright were signed by all those
willing to help.
Participants are also asked to set the camera to the
maximum available resolution, to capture photos in
landscape format, i.e. horizontally, to always use the
same camera, preferably the one with the best resolu-
tion that is usually the rear camera.
2.2 Background Pictures
With the term “background pictures” we indicate the
subset of photos portraying uniform colour scene,
preferably the blue sky. This kind of pictures were
included in the database since they are used in a num-
ber of techniques in order to extract the sensors ref-
erence pattern noise, e.g. in the approaches presented
in (Lukas et al., 2006) (Li, 2009).
However, since the pictures were captured by dif-
ferent persons, and despite the instructions given to
the participants, some of the background pictures por-
tray non-uniform backgrounds. Some sample back-
ground images are shown in Fig. 3, where the first
row represents “good” background pictures and the
second row the “bad” ones.
2.3 Foreground Pictures
We employ the term “foreground pictures” to indi-
cate the photos portraying any kind of scene and in
opposition to the “background pictures”. These pic-
tures are very heterogeneous, since they were cap-
tured by different devices, by different persons, in dif-
ferent places, and at different times. Some sample
foreground images are shown in Fig. 4.
2.4 Videos
Ten short video clips are recorded with each device.
Their duration varies from 2 to 10 seconds.
2.5 Database Structure and Annotation
A naming convention has been adopted to distinguish
the images/videos captured with different devices, an
ID number has been assigned to each different de-
vice, and to indicate the type of the acquired item, i.e.:
“background picture”, “foreground picture”, “video”.
Along with pictures and videos, annotation files
describing the characteristics of the smartphones em-
ployed are provided. In particular they list, for each
device, the smartphone model, the Operating System,
the digital camera model, the photo resolution and the
video resolution employed during acquisition.
In Fig. 5, a graph of the distribution of the 60
different smartphone brands included in SOCRatES
is given.
The database is released under a license agree-
ment ensuring the compliance with the current Euro-
pean regulations. Researchers shall use the Database
only for non-commercial research and educational
purposes.
SOCRatES: A Database of Realistic Data for SOurce Camera REcognition on Smartphones
651

Table 1: Devices main features. IR = Image Resolution; #BG = number of background pictures; #FG = number of foreground
pictures; VR = Video Resolution.
ID Brand Model IR #BG #FG VR #video
100 Motorola X Play 5344x3006 50 40 1920x1080 10
101 Samsung Galaxy S5 (SM-G900F) 5312x2988 50 40 1920x1080 10
102 LG G3 D855 4160x2340 50 40 1920x1080 10
104 Samsung Galaxy S5 5312x2988 50 40 1920x1080 10
105 Wiko Birdy 4G 2560x1920 50 40 1920x1088 10
107 Apple iPhone 6 3264x2448 50 40 1920x1080 10
108 Apple iPhone 6 3264x2448 50 40 1920x1080 10
109 Apple iPhone 6 3264x2448 50 40 1920x1080 10
110 Huawei P8 Lite 4160x3120 50 40 1920x1088 10
111 LG G3 4160x3120 50 40 1920x1080 10
112 Motorola Moto G (XT1072) 3264x1836 50 50 1280x720 10
113 Sony E6653 3840x2160 50 40 1920x1080 10
114 Apple iPhone 6s 4032x3024 50 40 1920x1080 10
115 Samsung Galaxy Core Prime 2592x1944 50 40 1280x720 10
116 LG G4 5312x2988 50 40 - 0
117 Acer Liquid E700 3840x2160 50 40 1920x1088 10
118 Nokia Lumia 635 1920x1080 50 40 1280x720 10
119 Wiko Rainbow 4G 3264x2448 50 40 1280x720 10
120 Apple iPhone 5c 3264x2448 50 40 1920x1080 10
121 Motorola Moto G 2592x1944 50 40 - 10
123 Samsung Galaxy S6 Edge 5312x2988 50 46 640x368 10
124 Samsung Galaxy S3 Neo (GT-i9301i) 1280x720 50 40 1920x1080 10
125 Huawei P7 4160x2336 50 40 1280x720 10
126 LG Nexus 5 3264x2448 50 40 1920x1080 10
127 Sony Xperia Z1 Compact 3840x2160 50 40 1920x1080 10
128 Apple iPhone 6s 4032x3024 50 40 1920x1080 10
129 Apple iPhone 5c 3264x2448 50 50 1920x1080 10
130 Lenovo S60-a 4096x2304 50 40 1920x1080 10
131 Samsung Galaxy S3 Neo (GT-i9301i) 3264x1836 50 40 1920x1080 11
132 Motorola Moto X-Style 5344x3006 50 40 1920x1080 10
133 Samsung Note 4 5312x2988 50 40 1920x1080 10
135 Samsung Galaxy Grand Prime 3264x2448 50 40 1920x1080 10
136 Apple iPhone 4s 3264x1836 50 50 1920x1080 10
137 Apple iPhone 6 3264x2448 50 50 1920x1080 10
138 Sony Xperia Z3 1278x718 50 50 1920x1080 10
139 Samsung Galaxy Core Max (SM-G5108Q) 3264x1836 50 40 1920x1080 10
140 LG G3 D855 4160x2340 50 40 1920x1080 10
141 Asus Zenfone 2 4096x3072 50 40 1920x1080 10
142 Apple iPhone 5c 3264x2448 50 40 1920x1080 10
143 Sony Xperia Z3 3840x2160 50 40 1920x1080 10
144 HTC One M8 2688x1520 50 40 1920x1080 10
145 Asus Zenfone 2 (ZE551ML) 4096x3072 50 40 1920x1080 5
146 Apple iPhone 4s 3264x2448 50 40 1920x1080 10
147 Motorola Moto G 4160x2340 50 40 1920x1080 10
148 Apple iPhone 5s 3264x2448 50 40 1920x1080 10
149 LG Spirit LTE 3264x1840 50 40 1280x720 10
150 Apple iPhone 6 640x480 50 40 1280x720 10
152 Samsung Galaxy Grand Plus 2560x1536 50 40 1280x720 10
154 Apple iPad mini 2 1026x766 50 39 1920x1080 10
155 OnePlus X 4160x3120 50 40 1920x1080 10
156 Sony M4 3920x2204 50 40 1920x1080 10
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
652

Table 1. (continuation)
ID Brand Model IR #BG #FG VR #video
157 Sony Xperia Z (C6603) 3920x2204 50 40 1920x1080 10
158 Samsung Galaxy Core Prime 2560x1536 50 40 1280x720 10
159 Samsung Galaxy S6 5312x2988 50 40 1920x1080 10
160 OnePlus One 4160x3120 50 40 3840x2160 10
161 Samsung Galaxy S5 Mini 3264x1836 50 40 1920x1080 10
162 Samsung Galaxy S4 4128x2322 50 40 1920x1080 10
163 Samsung A510F 4128x2322 50 50 1920x1080 10
165 Apple iPhone 5s 3264x2448 50 40 1920x1080 10
166 Samsung Galaxy S5 5312x2988 50 40 - 13
167 Apple iPhone 5c 2049x1536 50 40 1280x720 10
168 Wiko Highway 4G 640x480 50 40 1280x720 10
169 Apple iPhone 6 3264x2448 50 50 1920x1080 10
170 Apple iPhone 5c 3264x2448 50 50 1920x1080 10
171 Asus Zenfone MAX 3024x4032 50 50 1920x1080 10
172 Apple iPhone 7 4032x3024 50 50 1920x1080 10
173 Apple iPhone SE 4032x3024 50 50 1920x1080 10
174 Samsung Galaxy S5 4608x2592 50 50 1920x1080 10
175 Apple iPhone 6s plus 4032x3024 50 50 1920x1080 10
176 Sony Xperia Z3 (D6603) 3840x2160 50 50 1920x1080 10
177 Apple iPhone 4s 3264x2448 50 50 1920x1080 10
179 Apple iPhone 5c 3264x2448 50 50 1920x1080 10
182 Samsung Galaxy S3 4128x3096 52 53 1920x1080 10
183 Apple iPhone 7 4032x3024 50 50 3840x2160 10
185 Samsung Galaxy S7 Edge 4032x3024 50 50 1920x1080 10
186 LG Nexus 5X 4032x3024 50 51 1920x1080 10
187 LG Nexus 5X 4032x3024 50 50 3840x2160 10
189 Samsung Galaxy A3 (2016) 4128x2322 50 50 1920x1080 10
190 Apple iPhone 7 4032x3024 50 50 1920x1080 10
191 Asus Zenfone 3 4096x2304 50 50 1280x720 10
193 Vernee Thor 4864x2736 50 50 1280x720 10
194 Sony Xperia T3 3104x1746 50 50 1920x1080 20
195 Apple iPhone 6 3264x2448 50 50 1280x720 10
196 Samsung Galaxy A3 (2016) 3264x2448 50 50 1920x1080 10
197 Meizu M3 Note 2560x1440 50 50 1920x1080 10
198 Motorola Moto G3 4160x2340 50 50 1920x1080 10
199 LG G4 5312x2988 50 50 1920x1080 10
200 Wiko Rainbow Up 4G 3264x2448 48 50 - 0
201 Apple iPhone 6s 4032x3024 50 50 1920x1080 11
202 Samsung Galaxy S4 4128x2322 60 40 1920x1080 10
204 Nokia Lumia 930 3552x2000 50 40 1920x1080 10
210 Apple iPhone 6 3264x2448 50 50 1920x1080 10
211 Apple iPhone 5 960x720 50 50 576x320 10
212 Asus Zenfone 2 (ZE551ML) 4096x2304 50 53 1920x1080 13
213 Sony Xperia E3 2560x1440 50 50 1920x1080 10
214 Samsung Galaxy J7 4128x2322 50 50 1920x1080 10
215 Apple iPhone 6 3264x2448 50 50 1920x1080 10
216 LG K10 4G 4160x2340 50 50 1280x720 10
217 Motorola Moto G3 4160x2340 50 50 1920x1080 10
219 Samsung Galaxy J7 2016 4128x3096 50 50 1920x1080 10
220 Samsung Galaxy S4 mini 1280x720 50 50 1920x1080 10
224 LG G3 2048x1536 50 50 3840x2160 10
225 Samsung S7 Edge 4032x3024 73 50 1920x1080 10
SOCRatES: A Database of Realistic Data for SOurce Camera REcognition on Smartphones
653
3 BASELINE ASSESSMENT
In this section, the baseline assessment based on two
well-known techniques, presented in (Lukas et al.,
2006) and (Li, 2009), is reported. The purpose of
this evaluation is to provide the researchers willing
to use this database with a starting point to be used
for comparisons in the evaluation of their techniques.
The analysis is based on the extraction and compari-
son of the Sensor Pattern Noise (SPN in the follow-
ing) (Lukas et al., 2006). The SPN can be seen as
the sensor “fingerprint”, a distinctive pattern due to
imperfections in the silicon wafer during the sensor
manufacturing, different even among cameras of the
same model. The SPN n is computed as follows:
n = DW T(I) − F(DW T (I))
where DW T () is the discrete wavelet transform to be
applied on image I and F() is a denoising function
applied in the DWT domain. For a more detailed de-
scription of F(), the reader is referred to appendix A
of (Lukas et al., 2006).
For each device, its Reference SPN (RSPN) is
computed using its “background pictures”. The
RSPN n
r
corresponds to the average SPN computed
over N images:
n
r
=
1
N
×
N
∑
k=1
n
k
In order to test if a picture comes from a given
device, its SPN is compared with the device RSPN.
The higher the correlation, the more likely the photo
comes from the device. Correlation is computed as
follows:
corr(n,n
r
) =
(n − ¯n) ∗ (n
r
− ¯n
r
)
||n − ¯n||||n
r
− ¯n
r
||
where the bar above a symbol denotes the mean value.
3.1 Lukas et al.’s Approach
Performance on SOCRatES
The performances of the method proposed by Lukas
et al. in (Lukas et al., 2006), are summarized in this
section. The RSPN is extracted, as described above,
from the “background pictures” for each device us-
ing the code made publicly available by the authors
1
.
Then the SPN is computed for each “foreground pic-
ture” and associated to the most correlated RSPN.
Performances are assessed in terms of Equal Error
Rate (EER), Receiver Operating Characteristic curve
(ROC) and Area Under the ROC curve, and sum-
marised in Table 2.
1
http://dde.binghamton.edu/download/camera fingerprint/
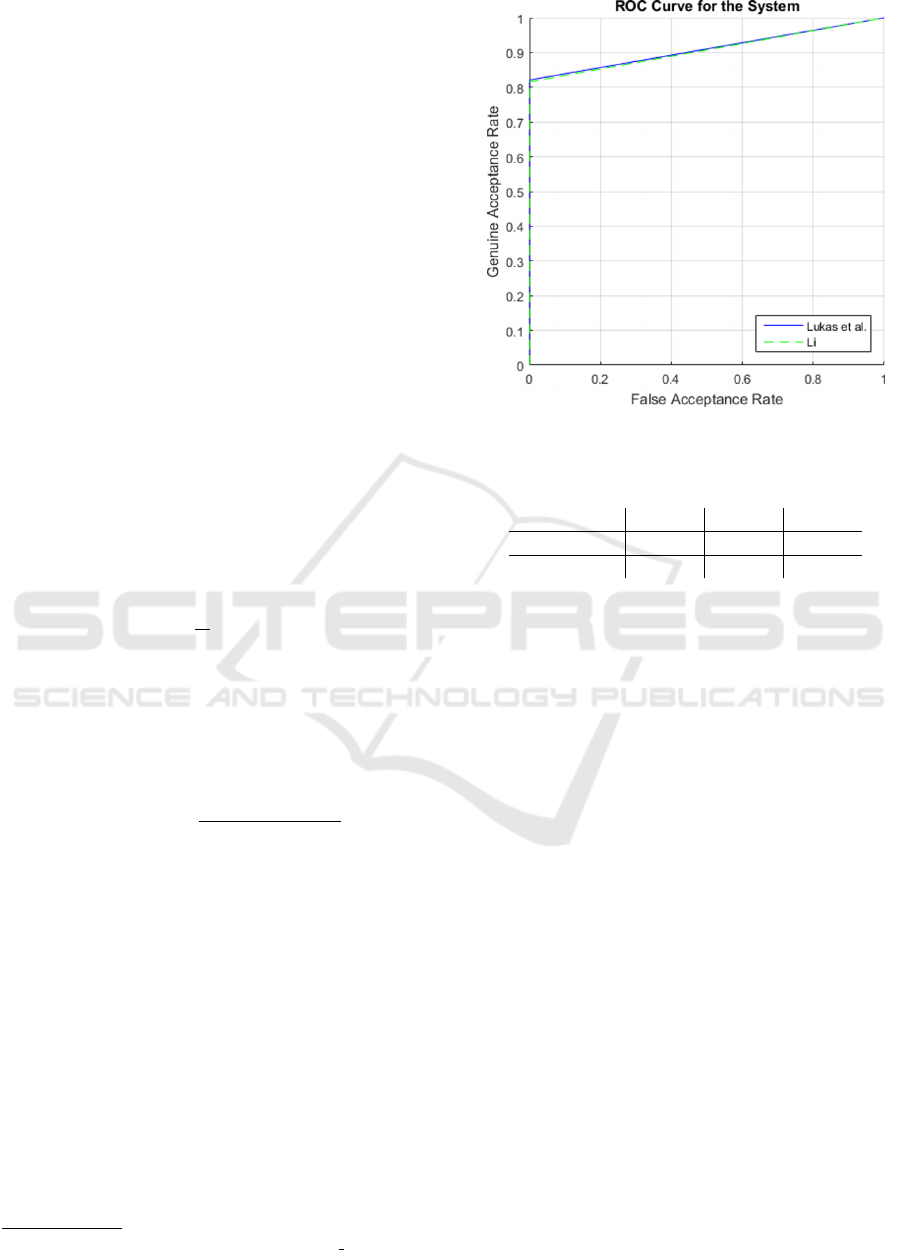
Figure 6: ROC curve illustrating the baselines assessment
on SOCRatES.
Table 2: Performances of Lukas et al. and Li on SOCRatES.
EER AUC RR
Lukas et al. 0.0894 0.9106 0.9191
Li 0.0921 0.9079 0.9164
3.2 Li’s Approach Performance on
SOCRatES
Li’s approach proposes an enhancing process to miti-
gate the impact of scene details in the computation of
the SPN. The Enhanced SPN (ESPN in the following)
n
e
is obtained as follows:
n
e
(i, j) =
(
e
−0.5n
2
(i, j)/α
2
, if 0 <= n(i, j)
−e
−0.5n
2
(i, j)/α
2
, otherwise
where n
e
is the ESPN, n is the SPN, i and j are
the indices of the components of n and n
e
, and α is a
parameter that is set to 7, as indicated in (Li, 2009).
As in the first experiment, the RSPN is extracted
from the “background pictures”. Then the ESPN is
computed for each “foreground picture” and associ-
ated to the most correlated RSPN, i.e. each “fore-
ground picture” is associated to the most correlated
camera.
The ROC curves obtained by the two tested meth-
ods are compared in Fig. 6.
4 CONCLUSION
One of the most important contributions to Western
thought of the classical Greek philosopher Socrates is
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
654

his dialectic method of inquiry, which is the founda-
tion of the modern scientific method. This is why we
found his name appropriate for a database designed
for image and video forensic.
SOCRatES is a publicly available database in-
tended for source digital camera identification on
smartphones. In other fields, several databases are
merged together to have a wider pool of data. This is
done in particular for developing and benchmarking
of deep-learning based techniques that require thou-
sands of images and are the trend at the moment.
SOCRatES can be used alone or in combination with
other image or video databases in order to widen the
data pool. Also, its challenging data samples, make it
very suitable as testing set.
In this paper the SOCRatES database is described
and baseline performances are obtained by testing two
well-known techniques based on the Sensor Pattern
Noise computation. The latter is a technique to iden-
tify, given a picture, its source digital camera. In par-
ticular, this technique can distinguish devices of the
same make and model.
Another important feature of SOCRatES, is the
presence of both images and videos captured with
each device. This allows the study of source cam-
era recognition on strongly compressed videos, which
is still an open issue, as for the study of asymmetric
comparison between videos and still images.
SOCRatES is made freely available to other re-
searchers for scientific purposes at the following
URL: http://socrates.eurecom.fr/.
REFERENCES
C¸ eliktutan, O., Sankur, B., and Avcibas, I. (2008). Blind
identification of source cell-phone model. IEEE
Trans. Information Forensics and Security, 3(3):553–
566.
Choi, K. S., Lam, E. Y., and Wong, K. K. (2006). Source
camera identification using footprints from lens aber-
ration. In Digital Photography II, volume 6069, page
60690J. International Society for Optics and Photon-
ics.
Chuang, W.-H., Su, H., and Wu, M. (2011). Exploring
compression effects for improved source camera iden-
tification using strongly compressed video. In Im-
age Processing (ICIP), 2011 18th IEEE International
Conference on, pages 1953–1956. IEEE.
Deng, Z., Gijsenij, A., and Zhang, J. (2011). Source cam-
era identification using auto-white balance approxi-
mation. In Computer Vision (ICCV), 2011 IEEE In-
ternational Conference on, pages 57–64. IEEE.
Farinella, G. M., Giuffrida, M. V., Digiacomo, V., and Bat-
tiato, S. (2015). On blind source camera identifica-
tion. In International Conference on Advanced Con-
cepts for Intelligent Vision Systems, pages 464–473.
Springer.
Galdi, C., Nappi, M., and Dugelay, J.-L. (2016). Multi-
modal authentication on smartphones: Combining iris
and sensor recognition for a double check of user iden-
tity. Pattern Recognition Letters, 82:144–153.
Galdi, C., Nappi, M., Dugelay, J.-L., and Yu, Y. (2018).
Exploring new authentication protocols for sensitive
data protection on smartphones. IEEE Communica-
tions Magazine, 56(1):136–142.
Geradts, Z. J., Bijhold, J., Kieft, M., Kurosawa, K., Kuroki,
K., and Saitoh, N. (2001). Methods for identification
of images acquired with digital cameras. In Enabling
technologies for law enforcement and security, vol-
ume 4232, pages 505–513. International Society for
Optics and Photonics.
Gloe, T. and B
¨
ohme, R. (2010). The’dresden image
database’for benchmarking digital image forensics. In
Proceedings of the 2010 ACM Symposium on Applied
Computing, pages 1584–1590. ACM.
Gloe, T., Pfennig, S., and Kirchner, M. (2012). Unex-
pected artefacts in prnu-based camera identification:
a’dresden image database’case-study. In Proceedings
of the on Multimedia and security, pages 109–114.
ACM.
Lanh, T. V., Chong, K., Emmanuel, S., and Kankanhalli,
M. S. (2007). A survey on digital camera image foren-
sic methods. In 2007 IEEE International Conference
on Multimedia and Expo, pages 16–19.
Li, C.-T. (2009). Source camera identification using enah-
nced sensor pattern noise. In Image Processing
(ICIP), 2009 16th IEEE International Conference on,
pages 1509–1512. IEEE.
Lin, X. and Li, C.-T. (2016). Enhancing sensor pattern noise
via filtering distortion removal. IEEE Signal Process-
ing Letters, 23(3):381–385.
Lukas, J., Fridrich, J., and Goljan, M. (2006). Digital cam-
era identification from sensor pattern noise. IEEE
Transactions on Information Forensics and Security,
1(2):205–214.
Marra, F., Gragnaniello, D., and Verdoliva, L. (2018). On
the vulnerability of deep learning to adversarial at-
tacks for camera model identification. Signal Process-
ing: Image Communication, 65:240–248.
Marra, F., Poggi, G., Sansone, C., and Verdoliva, L. (2017).
A study of co-occurrence based local features for cam-
era model identification. Multimedia Tools and Appli-
cations, 76(4):4765–4781.
Redi, J. A., Taktak, W., and Dugelay, J.-L. (2011). Digital
image forensics: a booklet for beginners. Multimedia
Tools and Applications, 51(1):133–162.
Shullani, D., Fontani, M., Iuliani, M., Al Shaya, O., and
Piva, A. (2017). Vision: a video and image dataset for
source identification. EURASIP Journal on Informa-
tion Security, 2017(1):15.
Van, L. T., Emmanuel, S., and Kankanhalli, M. S. (2007).
Identifying source cell phone using chromatic aberra-
tion. In Multimedia and Expo, 2007 IEEE Interna-
tional Conference on, pages 883–886. IEEE.
SOCRatES: A Database of Realistic Data for SOurce Camera REcognition on Smartphones
655
