
Smartphone Teleoperation for Self-balancing Telepresence Robots
Antti E. Ainasoja
a
, Said Pertuz
b
and Joni-Kristian K¨am¨ar¨ainen
c
Laboratory of Signal Processing, Tampere University of Technology, Finland
Keywords:
Teleoperation, Telepresence, User Interface.
Abstract:
Self-balancing mobile platforms have recently been adopted in many applications thanks to their light-weight
and slim build. However, inherent instability in their behaviour makes both manual and autonomous operation
more challenging as compared to traditional self-standing platforms. In this work, we experimentally evaluate
three teleoperation user interface approaches to remotely control a self-balancing telepresence platform: 1)
touchscreen button user interface, 2) tilt user interface and 3) hybrid touchscreen-tilt user interface. We provide
evaluation in quantitative terms based on user trajectories and recorded control data, and qualitative findings
from user surveys. Both quantitative and qualitative results support our finding that the hybrid user interface
(a speed slider with tilt turn) is a suitable approach for smartphone-based teleoperation of self-balancing
telepresence robots. We also introduce a client-server based multi-user telepresence architecture using open
source tools.
1 INTRODUCTION
Telepresence can provide substantial aid in certain
applications of welfare services, such as remotely
visiting homes of self-living elderly (Apostolopoulos
et al., 2012; Leeb et al., 2015). In this scope, it is de-
sirable that these telepresence-based welfare services
allow for a teleoperation via mobile devices since
their users, e.g. nurses and health care providers,
should have access to quick and effective interaction.
Due to the flexibility and ease of access of mobile de-
vices, the combination of novel user interfaces and
smartphone-based teleoperation arise as a potential
alternative for these applications (Fong et al., 2001).
In the literature, several researchers have proposed
different approaches for the teleoperation of telepres-
ence platforms, such as haptic interfaces, or touch
screens (Ogata et al., 2015), and tilt user interface
(Findlater et al., 2013; Baldauf et al., 2015). However,
conclusive results on identifying the advantages and
disadvantages of each approach in the context of self-
balancing platforms are lacking and, therefore, fur-
ther research is warranted. In this work, we first de-
velop an architecture for the remote control of a self-
balancing “Segway-type” telepresence robot. Subse-
quently, we compare three different smartphone tele-
operation strategies: touchscreen button user inter-
face, tilt user interface, and hybrid touchscreen-tilt
a
https://orcid.org/0000-0003-2016-3870
b
https://orcid.org/0000-0001-8498-9917
c
https://orcid.org/0000-0002-5801-4371
user interface.
Telepresence platforms have shown their poten-
tial for human assistance in healthcare environments
(Boissy et al., 2007; Tiberio et al., 2012). In turn, self-
balancing robotic platforms are gaining momentum
in the community due to their slim and light-weight
build (Tsai et al., 2010). However, these platforms
pose certain challenges in term of stability and con-
trol. The teleoperation through wireless networks in-
troduce delays in robot response to commands. Fur-
thermore, the self-balancing mechanism prevents the
robot for speeding up, slowing down or stopping in-
stantaneously. Teleoperation user interfaces must be
comfortable to the operators and feel responsive even
with delayed execution of commands. This work pro-
vides an experimental baseline for the assessment of
the effectivenessof teleoperation user interface strate-
gies for self-balancing telepresence platforms.
The main contributions of this work can be sum-
marized as follows:
• We develop a client-server architecture for teleop-
eration using open source tools.
• We develop three intuitive but distinctly differ-
ent user interfaces for operating a self-balancing
telepresence robot based on three different strate-
gies: 1) touchscreen button user interface, 2) tilt
user interface and, 3) hybrid touchscreen-tilt user
interface.
• We propose a navigation task and evaluation crite-
ria to compare the implemented teleoperation user
interface strategies.
Ainasoja, A., Pertuz, S. and Kämäräinen, J.
Smartphone Teleoperation for Self-balancing Telepresence Robots.
DOI: 10.5220/0007406405610568
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 561-568
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
561

Experimental results from both quantitative and
qualitative evaluation with random users indicate that
the hybrid interface provides best performance in
terms of steadiness of driving and user preference.
Our source code and examples will be made publicly
available to facilitate further development of new fea-
tures and applications of telepresence for supporting
self-living elderly.
2 RELATED WORK
The use of smartphone-based user interface for telep-
resence robots can be traced back to (Fong et al.,
2001). In that work, they focused on the motivation
and design criteria for different user interface strate-
gies. More recently, improved user interface by robot
autonomy was proposed by Vaughan et al. (Vaughan
et al., 2016), who adopted the “reaching through the
screen” concept (Foote et al., 2004). In their system,
the telepresence bot is equipped with a fisheye lens
that provides broader view where a remote user clicks
the path and indicates the goal. ROS-based visual
navigation controls the movement towards the goal
location using the path points. Bohren et al. (Bohren
et al., 2016) take autonomy to a higher level by adopt-
ing a prediction model where robot operation is based
on predicted user controls. A formal definition of
prediction and user assistance in teleoperation was
given by Dragan and Srinivasa (Dragan and Srinivasa,
2012). This strategy is particularly important in the
presence of long network delays and a similar simu-
lation model has been proposed for multi-player game
client-server systems (Bernier, 2001). The aforemen-
tioned works have focused on the development of
novel user interface strategies without a direct com-
parison of different approaches.
In the literature, a lot of efforts have been devoted
to the improvement of the user experience in the op-
eration of telepresence platforms either by incorporat-
ing new features or by providing autonomous capabil-
ities. Kisevel et al. (Kiselev et al., 2015) studied the
usage of semi-autonomous features by novice telep-
resence users. Tee et al. (Tee et al., 2014) showed
improved telepresence experience in meetings by us-
ing audio-visual gesture and attention recognition.
Schwarz et al. (Schwarz et al., 2014) provide ad-
justable autonomy for teleoperation where manual
operation is requested when autonomy fails. Cosgun
et al. (Cosgun et al., 2013) incorporate autonomous
person following as a feature for telepresence plat-
form.
Most efforts in the comparison of user interface
strategies have been performed in the context of gam-
ing or virtual reality. In this scope, the results by Find-
later et al. (Findlater et al., 2013) indicate that modern
touchscreen interfaces are easier to use for non-expert
users than traditional “gaming setups” with mouse
and keyboard for simple pointing and clicking and
tracking task. Baldauf et al. (Baldauf et al., 2015)
did an analysis on different mobile phone game con-
troller interfaces and found that, while navigation but-
tons and virtual joystick are easier to use and more
accurate than tilt interfaces, they also needed more at-
tention from users in order to touch the controls pre-
cisely. These findings were based on 2D games on
large screen where the view point was third person or
from the bird eye perspective and suggested that tilt
user interface may be more suitable for certain first
person perspective games, such as flight simulators.
Most strategies considered in the state-of-the-art
are mainly based on touchscreen user interfaces. In
this work, we decided to include the tilt-based user
interfaces, as suggested by Baldauf et al. (Baldauf
et al., 2015) for first-person perspective games due to
their similarities with telepresence. Remarkably, self-
balancing telepresence is distinctly more challeng-
ing to operate than the traditional standing (three/four
wheel) platforms (Shimada and Hatakeyama, 2008).
3 SELF-BALANCING
TELEPRESENCE SYSTEM
The motivation for this work is the development of
a social robot platform with adjustable autonomy to
support self-living elderly. This particular application
poses specific requirements from both the user and
system perspective. Specifically, the platform must be
based on affordable commodity hardware and open
source software to allow agile development of new
features and services by the open source community.
In addition, the platform should guarantee that ad-
justable autonomy is available.
Adjustable autonomy in our case means that con-
trol can always be given to human users either when
requested by active peers or when the platform cannot
perform requested tasks autonomously. The lowest
level of autonomy is teleoperation and, for the needs
of different peers (nurses, relatives, elderly them-
selves and possible third parties), the teleoperation in-
terface must be easy-to-use, affordable and intuitive.
The teleoperation system developed for this purpose
in this work is illustrated in Fig. 1. The system is
comprised of four main components:
• Android client
• Communication server
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
562
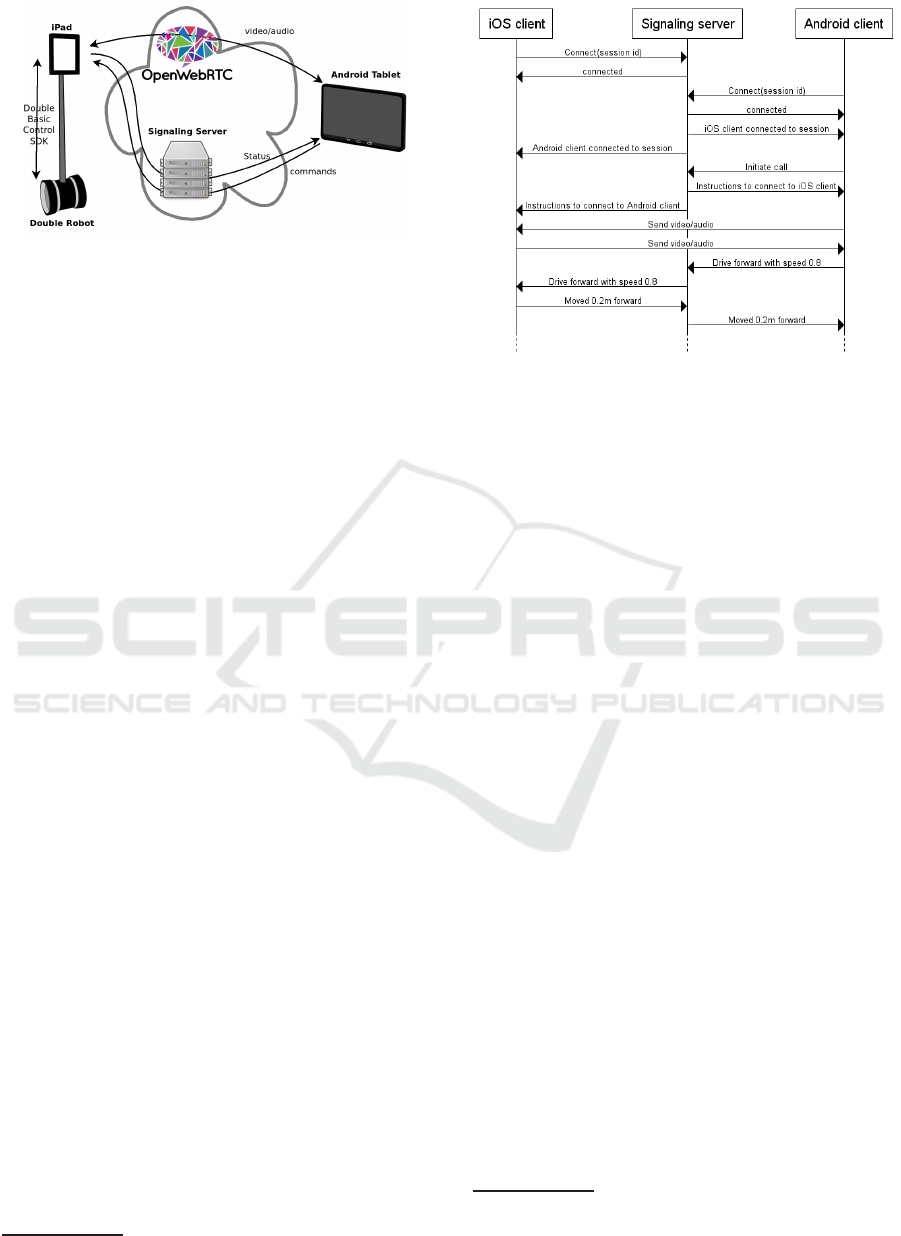
Figure 1: The most important parts of the telepresence sys-
tem. The system includes a self-balancing Double telepres-
ence robot controlled by a system that comprises an iPad,
an Android tablet device and a Communication server.
• Telepresence robot
1
• iPad control platform
Each one of the components of the system are de-
tailed below.
Android Client. All the interactions between the
user and the system are managed through a tablet run-
ning the Android client. In order to allow for a flexible
operation of the telepresence robot, an Nvidia Shield
K1 Android tablet was used. The table is equipped
with a capacitive multi-touch screen, accelerometer
and gyroscope. An application with several graphical
user interfaces (GUI’s) was developed in order to im-
plement the operation strategies under study (section
4).
The Android client is connected to Internet
through an LTE network. In order to have access
to the video and audio streams, as well as for send-
ing commands to the robot, the Android client is
connected to the Communication server (see below)
through an HTTP application running on a Linux
host.
Communication Server. The job of the communi-
cation server (CS) is establishing the connection be-
tween the Android client (user) and the iPad used to
control the Double robot upon request by the user.
Once the connection is established, the CS manages
the communication between the user and the iPad.
Depending on the type of signal, the communi-
cation goes through two different paths. On the one
side, status signals reported by robot, as well as com-
mands sent by the user from the Android client, go
through the CS. The CS logs and sends the teleoper-
ation commands received from the user. On the other
1
https://www.doublerobotics.com/
Figure 2: A sequence diagram of iOS and Android clients
making connection through signaling server (CS).
side, video and audio signals from the iPad are trans-
ferred to the Android server using the OpenWebRTC
2
implementation of WebRTC
3
standard. The WebRTC
protocol was chosen due to its flexibility, modular-
ity and cross-platform interoperability. A sequence
diagram illustrating connection initialization between
clients and server is presented in Figure 2.
iPad Control Platform. An iPad tablet is used for
direct control of the Double robot and for capturing
the video and audio signal on the robot end. In or-
der to facilitate navigation, the camera was equipped
with a Black Eye full-frame fisheye lens with 180-
degree field of view
4
. This was found to be a good
compromise between viewing the surroundings of the
robot and being able to see the objects in front of the
robot in detail. As stated previously, the video and
audio signals are sent to the user using WebRTC. For
motion control of the telepresence platform, a custom
application was developed based on the Double SDK
for the iPad to delegate the commands to the robot.
4 SMARTPHONE USER
INTERFACES
For comparison purposes, we implemented three user
interfaces for the self-balancing two-wheel telepres-
ence navigation system described in previous section:
1) touchscreen user interface (found best in (Baldauf
et al., 2015) for third person interfaces in 2D games),
2) Tilt user interface (simplest interface requiring the
2
https://www.openwebrtc.org
3
https://www.w3.org/TR/webrtc/
4
https://blackeyelens.com/product/full-frame-fisheye/
Smartphone Teleoperation for Self-balancing Telepresence Robots
563

least amount of user attention), and 3) Hybrid (tilt
for turning and a slider for forward/backward). In all
of our interfaces it is assumed that a user holds the
tablet horizontally with both hands. The interfaces
have a view of the remote video stream at the center
and the control interfaces are on left and right sides of
the stream view. Examples of the user interfaces are
shown in Fig. 3. A more detailed explanation of the
features of each implemented user interface strategy
can be found below.
4.1 Touchscreen Button UI (B-GUI)
The navigation buttons interface consists of four but-
tons marked with arrows on each side of the remote
video view. By pressing the buttons the robot moves
forward or backward and turns left or right. Both
the left and right hand side buttons worked identically
and the intention was that they could be used together
to accelerate/decelerate with one hand and steer with
other, or use one hand for both turning and speeding.
The buttons only have binary states so when the but-
ton is pressed the robot moves according to the direc-
tion at full speed. When no buttons are pressed, the
robot stops. Due to the self-balancing nature of the
robot, the acceleration is never immediate. Using lin-
ear or exponential acceleration over a short period of
time after the button is pressed made the interface feel
more sluggish and delayed.
4.2 Tilt Interface (T-GUI)
The tilt user interface uses the pitch and roll of the
tablet relative to real world coordinates to operate the
robot. The pitch is used to control the speed of the
robot; tilting away (forward) makes the robot move
forward and tilting back backwards. Likewise, the roll
turns the robot left and right, respectively.
During the early experiments we noticed that
some mechanism was needed to tell when the user
interface was used – active – and when not. For this
reason we placed dead man’s switch-type buttons on
the interface. In the initial setting, pressing only one
of the buttons made the system active, but this was not
sufficient since users, when distracted, kept holding
the tablet touching a switch with one hand and subse-
quently lost the control of the robot. In the final in-
terface, both dead man’s switches need to be pressed
simultaneously.
The tilt interface measured the angular displace-
ment of the tablet from the neutral position. Displace-
ment angles were mapped to the velocity (pitch) and
turning speed (roll) of the robot. In order to make it
easier to hold the robot still, displacement angles pro-
portionalto the full calibration scales and less than the
threshold τ
σ
= 10 % from the neutral position were
mapped to zero. It was noticed that, in order to have
better control of the robot at lower velocities, linear
mapping was not sufficient. We squared the angles
to have more fine control at the lower velocities. For
turning, linear mapping seemed more comfortable.
4.3 Hybrid Interface (BT-GUI)
The third implemented user interface was a hybrid of
the two above. Steering of the robot is the same as
in T-GUI and the velocity was controlled similar to
B-GUI, but the button was replaced with a “spring
slider” (right hand side of the GUI). A user drags the
slider up and down to move the robot forward and
backwards. Due to the spring effect the switch returns
immediately to the neutral position when released.
The position of the switch was linearly mapped to the
robot velocity. One dead man’s switch was placed
on the left hand side to allow turning the robot with-
out moving it backwards or forwards. Turning works
only when either the dead man’s switch or the slider
switch are touched.
5 ASSESSMENT
METHODOLOGY
In order to assess the performance of each operating
strategy, users were asked to perform a simple task us-
ing one or more approach in random order and differ-
ent performance indicators were measured. The de-
tails about the performance indicators are presented
in Section 5.1 and Section 5.2. A summary of the per-
formance indicators can be found in Fig. 4 The de-
scription of the task and testing environment assigned
to users are presented in Section 5.3.
5.1 Quantitative Performance
Indicators
Quantitative performance indicators were divided in
two groups: indicators aimed at measuring the effec-
tiveness of the assigned task, and indicators aimed at
measuring the driving style and comfort of the user.
Driving Effectiveness. The driving effectiveness is
aimed at assessing how effective the teleoperation
strategies were in the completion of the assigned task,
regardless of the driving style or perceived comfort.
Indicators aimed at measuring the effectiveness were
three:
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
564
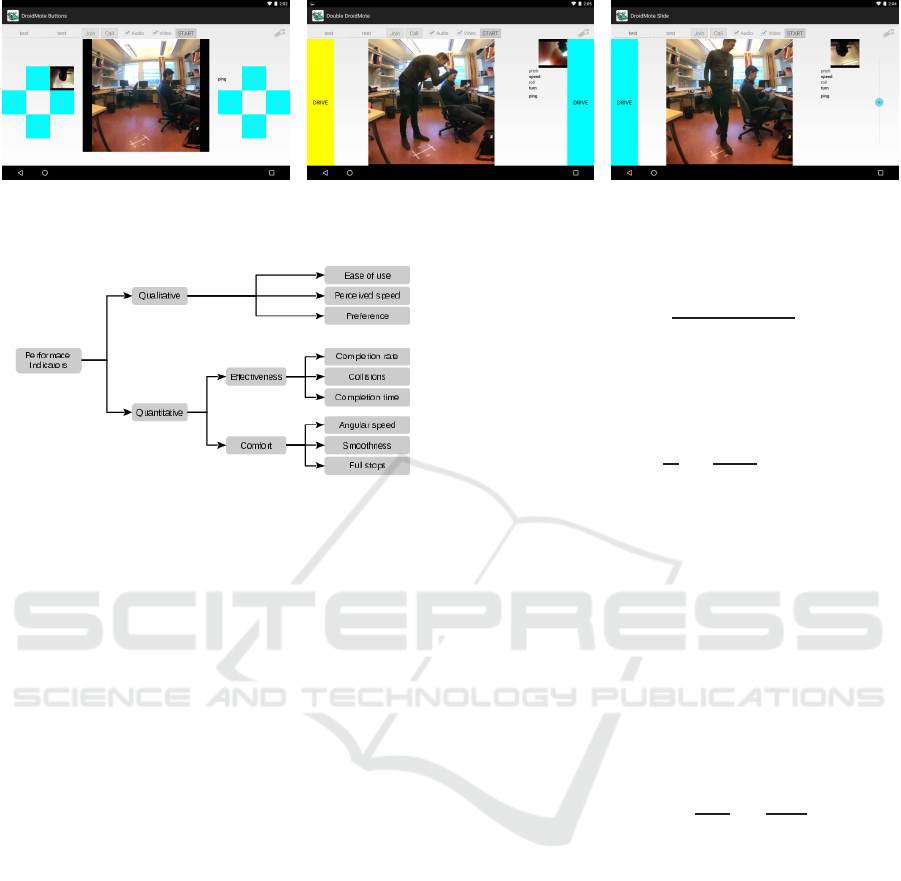
Figure 3: Developed interfaces for the implemented teleoperation strategies. (a) touchscreen interface with navigation buttons,
(b) tilt interface and, (b) Hybrid touchscreen-tilt interface. The two tilt-based interfaces (b)-(c) include a dead man’s switch
(“Drive” button in the GUI’s) that turns the tilt interface on/off.
Figure 4: Performance indicators. Quantitative indicators
were measured by analyzing the logged signals from the
telepresence platform. Qualitative indicators were assessed
by means of user surveys.
• Completion rate
• Number of collisions
• Completion time
From these indicators, the most important one is
the completion rate; whether or not the user could
maneuver the robot safely, or at all. The amount of
collisions was measured by observing the amount of
crashes during each test drive. The completion time
indicates how fast the operators are able to complete
the task.
Driving Comfort. The indicators for driving com-
fort are aimed at assessing how smooth and steady is
the operation of the platform. For this purpose, we
defined three performance indicators:
• Average angular speed
• Smoothness of the trajectory
• Number of full stops
Both the average angular speed and the smooth-
ness of the trajectory are aimed at measuring how sta-
ble is the trajectory of the platform. Ideally, the robot
should move following a smooth trajectory without
sudden changes in direction or speed. For this pur-
pose, given a parametric trajectory {x(t), y(t)} as a
function of time t, the instantaneous steering angle is
given by:
θ(t) ≈ tan
−1
x(t + ∆t) − x(t)
y(t + ∆t) − y(t)
, (1)
where ∆t is the time step used when recording the data
of the telepresence platform.
The average angular speed, ω
mean
, is then mea-
sured as:
ω
mean
=
1
N
N
∑
n=1
dθ(t)
dt
dt, (2)
where N is the number of time stamps.
The smoothness of the trajectory is measured by
estimating the Laplacian in the x and y directions, as:
Smoothness = |∇
2
x(t)| + |∇
2
y(t)| (3)
Finally the number of full-stops was measured in
order to record how confidently the users could per-
form the task. It was assumed that stopping was done
when the operators felt they were about to lose con-
trol of the robot. A full stop was assumed when the
operator sent no commands to the robot and robot was
not moving. Specifically, the amount of robot motion
was computed as:
Robot motion = |
v
v
max
| + |
ω
ω
max
|, (4)
where v and ω are the instantaneous velocity and an-
gular velocity, v
max
is the maximum velocity (0.5 m/s)
and ω
max
is the maximum angular velocity (0.586
rad/s) of the robot.
Due to the self-balancing mechanism, the robot is
constantly swaying back and forth, even when sta-
tionary. This was accounted by setting a threshold
level on the motion. The robot was considered fully
stopped if the amount of motion was below the thresh-
old of 0.05. The robot motion and the mechanism for
the detection of full stops is illustrated in Figure 5.
5.2 Qualitative Performance Indicators
An important performance indicator is how the opera-
tors subjectively felt about each operation strategy. A
short survey was created for this purpose in order to
assess three different aspects:
Smartphone Teleoperation for Self-balancing Telepresence Robots
565
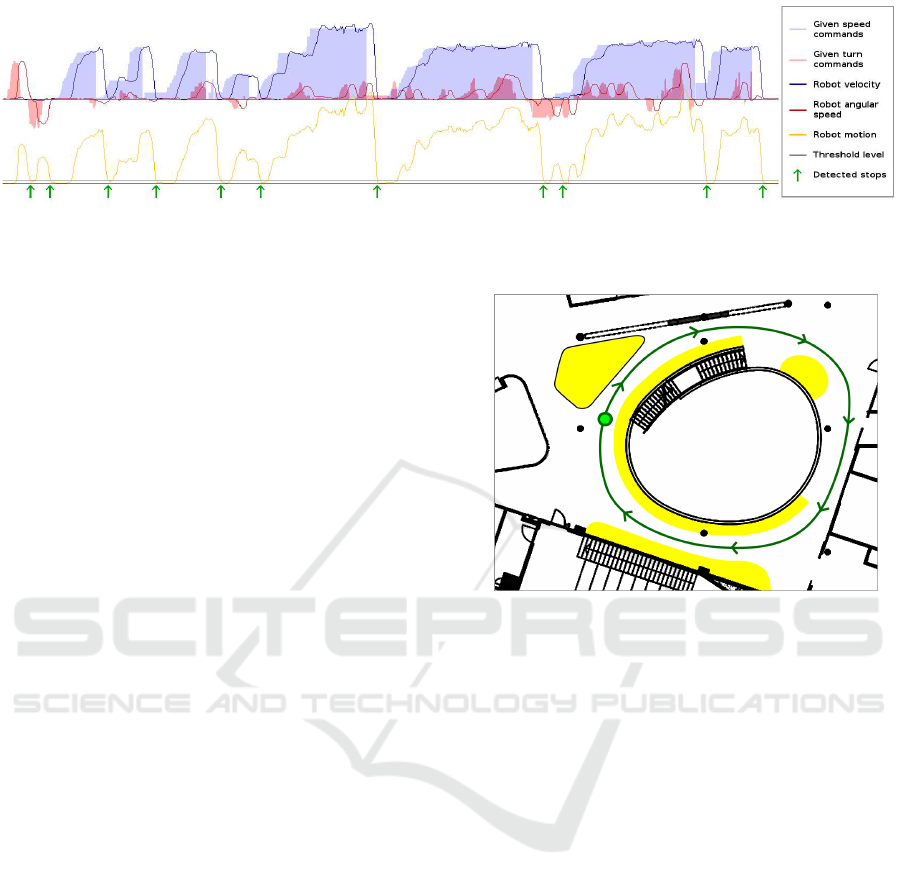
Figure 5: An example of sent commands in relation to the robot motion over time. The robot is considered to be in full stop
when the yellow line is below the threshold level.
• Ease of use
• Perceived speed
• User preference
On the survey, operators were asked to give feed-
back on how they felt about the ease of use of each
user interface approach. Each approach was assigned
a qualification of 0, 1, 2 or 3, corresponding to four
levels of difficulty: very easy, easy, difficult and very
difficult. Users were also surveyed on how fast they
perceived that they could perform the given task. This
was to assess the consistency between objective quan-
titative performance indicators, such as the comple-
tion time, and the perceived user experience. Finally,
operators who tested more than one user interface ap-
proach were asked which one they preferred. If a n
user interface feels too difficult and stressful, it would
not be used by the operators even if it was safe and
fast.
5.3 Navigation Task and Environment
In order to collect quantitative and qualitative indi-
cators, users were to maneuver the robot around an
approximately 50 m long route in well-lit, populated
lobby area (Fig. 6). Due to people having different
ways of holding a tablet, the tilt and hybrid interfaces
had initially a calibration tool for configuring the neu-
tral (no movement) and extreme positions (full for-
ward, full backward and extreme left and right) for
each user. In preliminary tests, this was found to be
too time consuming and complicated. Therefore the
experiments reported in this work were done with a
common pre-calibration. For controlling speed, the
neutral position was set to 30
◦
with 0
◦
and 60
◦
extreme
positions. For turning, the neutral position was set to
0
◦
with -45
◦
and 45
◦
extreme positions. During initial
experiments users reported the fast acceleration and
speed to be difficult when using the touchscreen but-
ton interface. For the touchscreen button interface,
velocity was therefore limited to 75% of the robot’s
maximum velocity.
Figure 6: Map of the experiment area. Yellow denotes
working areas with non-fixed furniture. Green dot is the
start/finish location and green line is the ideal route of the
task.
6 RESULTS AND DISCUSSION
We recruited 21 participants (18 males, 3 females)
with ages ranging from 21 to 47 (mean 27.1). 13
participants completed the navigation task described
in section 5.3 using all the three user interfaces. Re-
ported quantitative indicators were collected from the
logged navigation signals and robots internal mea-
surement unit (received by the platform), whereas
qualitativeresults were obtained from user surveys af-
ter completing the task.
6.1 Quantitative Indicators
The average indicators for the different interfaces are
shown in Table 1 (Driving effectiveness) and Table 2
(Driving comfort). Tests that failed to be completed
due to network failures (1 for T-GUI, 5 for BT-GUI)
were omitted from quantitative data. Cases where
users fatally crashed the robot (task could not be com-
pleted) are included in the completion rate, but not
omitted from other qualitative data.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
566
Table 1: Quantitative indicators for driving effectiveness.
UI Completion rate Avg. collisions Avg.time (std) N
B-GUI 0.94 0.13 220 (42) s 15
T-GUI 1.0 0.23 198 (55) s 13
BT-GUI 0.91 0.33 211 (71) s 10
Table 2: Quantitative indicators for driving comfort.
UI stops (std) angular speed (std) Smoothness (std) N
B-GUI 8.2 (6.8) 0.1641 (0.1035) 0.7668 (1.1819) 15
T-GUI 7.7 (6.5) 0.1385 (0.0180) 0.4907 (0.1105) 13
BT-GUI 7.8 (5.1) 0.1337 (0.0158) 0.3596 (0.0876) 10
Table 3: The mean ease of use and perceived speeds re-
ported for each user interface on a scale from very easy/very
slow = 0 to very difficult/very fast = 3.
UI Ease of use Perceived speed
B-GUI 0.93 1.64
T-GUI 1.00 1.16
BT-GUI 0.96 1.21
Table 4: Teleoperation interface preferences of people who
tested all three interfaces.
B-GUI T-GUI BT-GUI
15% 35% 50%
The tilt interface (T-GUI) is the most effective in
the average task completion time. In driving com-
fort, however, the hybrid interface is clearly superior
in smoothness and also the best in average angular
speed (the lower values in table 2 indicate a better per-
formance). The number of full stops are similar for all
methods. The quantitative indicators do not provide a
clear winner, but the tilt and hybrid interfaces seem to
perform better than the plain touchscreen interface.
6.2 Qualitative Indicators
Results based on subjective feedback are summarized
in Tables 3 and 4. Users found controlling the robot
on all of the user interfaces to be easy. The two inter-
faces using tilt (T-GUI and BT-GUI) had a perceived
speed faster than the touchscreen-only interface (Ta-
ble 3). The user preference in Table 4 support this
observation.
Slide interface was preferred by users with tilt be-
ing the second favorite. Some users found it difficult
to use tilting for both turning and acceleration. This
was partly due to the interface’s sensitivity to cali-
bration and the position in which the table was held.
Some users found it difficult to hold the tablet in a po-
sition they were not accustomed to. Those preferring
the buttons reported that it was easier to perceive how
the robot moves using them.
Haptic feedback and better indication on turning
speed was suggested for the tilt and slide interfaces.
Not directly related to the interface schemes, the user
generally foundestimating the robot dimensions in re-
lation to the surroundings difficult. This was due to
the robot not being visible to the operator. An aug-
mentation to cast a shadow on the robot’s projected
path could make it easier to avoid obstacles and go
through tight spots.
6.3 Other Findings
The communication with the telepresence platform
relied on good wireless networks. The delay between
giving a command and robot reaction was usually
around 300 ms, but occasionally it could go up to sev-
eral seconds or connection was lost altogether.
7 CONCLUSIONS
In this paper we developed and implemented an archi-
tecture for the teleoperation of self-balancing telep-
resence platform using open source tools. The goal of
our architecture is to foster open community develop-
ment of social robotics applications for independent
living elderly.
The first obviousrequirement is user-friendly tele-
operation user interface for the cases an operator is
needed. To study teleoperation of a self-balancing bot
we implemented three different user interface strate-
gies: touchscreen, tilt and hybrid (a combination of
tilt and touchscreen). Quantitative and qualitative
measurements on a real navigation task suggest that
the hybrid interface yields the best performance in
terms of both driving comfort and user preference, tilt
Smartphone Teleoperation for Self-balancing Telepresence Robots
567

being the second best with small margin and touch-
screen buttons being the worst with clear margin.
ACKNOWLEDGEMENTS
This work was funded by Academy of Finland
project: “Robots and the Future of Welfare Services”,
decision number: 314180.
REFERENCES
Apostolopoulos, J. G., Chou, P. A., Culbertson, B., Kalker,
T., Trott, M. D., and Wee, S. (2012). The road to
immersive communication. Proceedings of the IEEE,
100(4):974–990.
Baldauf, M., Fr¨ohlich, P., Adegeye, F., and Suette, S.
(2015). Investigating on-screen gamepad designs for
smartphone-controlled video games. ACM Trans.
Multimedia Comput. Commun. Appl., 12(1s):22:1–
22:21.
Bernier, Y. (2001). Latency compensating methods in
client/server in-game protocol design and optimiza-
tion. In Game Developers Conference.
Bohren, J., Paxton, C., Howarth, R., Hager, G., and Whit-
comb, L. (2016). Semi-autonomous telerobotic as-
sembly over high-latency networks. In ICRA.
Boissy, P., Corriveau, H., Michaud, F., Labont, D., and
Royer, M.-P. (2007). A qualitative study of in-home
robotic telepresence for home care of community-
living elderly subjects. Journal of Telemedicine and
Telecare, 13(2):79–84. PMID: 17359571.
Cosgun, A., Florencio, D., and Christensen, H. (2013). Au-
tonomous person following for telepresence robots. In
ICRA.
Dragan, A. and Srinivasa, S. (2012). Formalizing assistive
teleoperation. In RSS.
Findlater, L., Froehlich, J. E., Fattal, K., Wobbrock, J. O.,
and Dastyar, T. (2013). Age-related differences in per-
formance with touchscreens compared to traditional
mouse input. In Proceedings of the SIGCHI Confer-
ence on Human Factors in Computing Systems, CHI
’13, pages 343–346, New York, NY, USA. ACM.
Fong, T., Conti, F., Grange, S., and Baur, C. (2001). Novel
interfaces for remote driving: gesture, haptic, and pda.
In Proc. SPIE 4195, Mobile Robots XV and Telema-
nipulator and Telepresence Technologies VII.
Foote, J., Liu, Q., Kimber, D., Chiu, P., and Zhao, F. (2004).
Reach-through-the-screen: A new metaphor for re-
mote collaboration. In Advances in Multimedia In-
formation Processing (PCM).
Kiselev, A., Kristoffersson, A., Melendez, F., Galindo, C.,
Loutfi, A., Gonzalez-Jimenez, J., and Coradeschi, S.
(2015). Evaluation of using semi-autonomy features
in mobile robotic telepresence systems. In Robotics,
Automation and Mechatronics (RAM).
Leeb, R., Tonin, L., Rohm, M., Desideri, L., Carlson, T.,
and d. R. Milln, J. (2015). Towards independence:
A bci telepresence robot for people with severe mo-
tor disabilities. Proceedings of the IEEE, 103(6):969–
982.
Ogata, M., Teramura, R., and Imai, M. (2015). Attractive
telepresence communication with movable and touch-
able display robot. In 2015 24th IEEE International
Symposium on Robot and Human Interactive Commu-
nication (RO-MAN), pages 179–184.
Schwarz, M., Stuckler, J., and Behnke, S. (2014). Mobile
teleoperation interfaces with adjustable autonomy for
personal service robots. In ACM/IEEE International
Conference on Human-Robot Interaction.
Shimada, A. and Hatakeyama, N. (2008). Movement con-
trol of two-wheeled inverted pendulum robots consid-
ering robustness. In 2008 SICE Annual Conference,
pages 3361–3366.
Tee, K., Yan, R., Chua, Y., Huang, Z., and Liemhetcharat, S.
(2014). Gesture-based attention direction for a telep-
resence robot: Design and experimental study. In
ROS.
Tiberio, L., Cesta, A., Cortellessa, G., Padua, L., and Pel-
legrino, A. R. (2012). Assessing affective response of
older users to a telepresence robot using a combina-
tion of psychophysiological measures. In 2012 IEEE
RO-MAN: The 21st IEEE International Symposium on
Robot and Human Interactive Communication, pages
833–838.
Tsai, C. C., Huang, H. C., and Lin, S. C. (2010). Adap-
tive neural network control of a self-balancing two-
wheeled scooter. IEEE Transactions on Industrial
Electronics, 57(4):1420–1428.
Vaughan, J., Kratz, S., and Kimber, D. (2016). Look where
youre going: Visual interfaces for robot teleoperation.
In Int. Symp. on Robot and Human Interactive Com-
munication (RO-MAN).
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
568
