
Synthesising Light Field Volumetric Visualizations in Real-time using a
Compressed Volume Representation
Se
´
an Bruton, David Ganter and Michael Manzke
Graphics, Vision and Visualisation (GV2), Trinity College Dublin, the University of Dublin, Ireland
Keywords:
Volumetric Data, Visualization, View Synthesis, Light Field, Convolutional Neural Network.
Abstract:
Light field display technology will permit visualization applications to be developed with enhanced perceptual
qualities that may aid data inspection pipelines. For interactive applications, this will necessitate an increase
in the total pixels to be rendered at real-time rates. For visualization of volumetric data, where ray-tracing
techniques dominate, this poses a significant computational challenge. To tackle this problem, we propose
a deep-learning approach to synthesise viewpoint images in the light field. With the observation that image
content may change only slightly between light field viewpoints, we synthesise new viewpoint images from a
rendered subset of viewpoints using a neural network architecture. The novelty of this work lies in the method
of permitting the network access to a compressed volume representation to generate more accurate images
than achievable with rendered viewpoint images alone. By using this representation, rather than a volumetric
representation, memory and computation intensive 3D convolution operations are avoided. We demonstrate
the effectiveness of our technique against newly created datasets for this viewpoint synthesis problem. With
this technique, it is possible to synthesise the remaining viewpoint images in a light field at real-time rates.
1 INTRODUCTION
Volumetric information is increasingly used across
many domains including civil engineering, radiology
and meteorology. Visualization of this volumetric in-
formation is an essential part of workflows in these
areas, with users tasked with inspecting the visualiza-
tion for patterns of interest. With the development of
advanced display technologies, such as 3D displays
and virtual reality, this visual inspection process may
be performed in a more natural manner, potentially
leading to easier discovery of salient patterns.
These future displays are likely to be enabled by
the use of light field technology (Wetzstein et al.,
2012; Lanman and Luebke, 2013). Displays employ-
ing light fields permit added perceptual quality, with
parallax, accommodation and convergence cues mak-
ing interactions with the displays more compelling
and natural. In a medical inspection setting, it has
been reported that light field displays add impressive
depth perception of structures in 3D scan data, and fa-
cilitate easier discrimination by the physician (Agus
et al., 2009).
A light field is a function that describes the direc-
tion and wavelength of all light rays in a scene (Levoy
and Hanrahan, 1996). Imaging technologies for light
fields, such as the Lytro Illum camera, simplify this
five-dimensional function to four dimensions, allow-
ing capturing of a light field by a discrete rectangular
grid of camera lenses. In a virtual setting, this light
field formulation can be represented by a 2D grid of
aligned cameras, where the image size at each cam-
era is given by the spatial resolution, and the num-
ber of cameras in the 2D grid is given by the angular
resolution. Thus, to render such a light field within
fixed computational bounds, there exists a trade-off
between the spatial resolution and the angular resolu-
tion. In this work, we seek to efficiently increase the
angular resolution of a light field rendering of volu-
metric data.
Rendering this volumetric data is itself a non-
trivial problem. The volume data can be highly de-
tailed, with multiple dimensions represented, such as
temperature and pressure in the case of a meteorolog-
ical simulation. This richness necessitates advanced
rendering techniques to be used (Philips et al., 2018).
The choice of methods, such as isosurface extraction,
and parameters, such as the transfer function, are de-
pendent on the domain and purpose of the visualiza-
tion. Furthermore, due to the dense nature of the vol-
ume, as opposed to sparse mesh representations, in-
formative visualizations often require expensive ray
96
Bruton S., Ganter D. and Manzke M.
Synthesising Light Field Volumetric Visualizations in Real-time using a Compressed Volume Representation.
DOI: 10.5220/0007407200960105
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 10th International Conference on
Information Visualization Theory and Applications), pages 96-105
ISBN: 978-989-758-354-4
Copyright
c
10th International Conference on Information Visualization Theory and Applications by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

tracing techniques to permit observation of salient in-
ternal substructures. Thus, rendering multiple visu-
alization frames at real-time rates is very demanding
for modest hardware.
For virtual light field cameras, in which the sen-
sors are arranged in a closely-spaced array, the ren-
dered image may change only slightly between differ-
ent sensors’ viewpoints. As such, the rendering power
used to produce one light field viewpoint image can
be re-used to help produce another. Advances in video
interpolation and viewpoint synthesis have shown that
such a problem is becoming more tractable, espe-
cially with the use of convolutional neural networks
that can learn how to estimate the dynamics of scene
components between views. In such videos, the nat-
ural scene is often composed of opaque objects, and
so unique correspondences between pixels in pairs of
images can be determined. Such correspondences can
be used to calculate optical flow and disparity, which
are key inputs of many of these interpolation tech-
niques. However, in the case of volumetric rendering,
the use of alpha values in the transfer function violates
the optical flow assumption of constant brightness of
object points. Furthermore, due to the contribution
of multiple object points, with differing alpha values,
to a final pixel value, a disparity value between two
images cannot be uniquely defined. Thus to obtain a
correct pixel value for a generated image, it is nec-
essary to understand the dynamics of multiple dense
volumetric scene components.
Another difference between this image interpola-
tion problem and that of natural scenes, is that the vol-
ume data is available to us. Using this data as an input
could potentially improve the quality of the generated
images. However, if a neural network approach to
the image interpolation problem is used, it is not clear
how best to exploit this volume data. Performing 3D
convolutional operations over the typically large vol-
umes would be highly demanding and may preclude
the use of this technique as part of a real-time system.
Accordingly, we propose the use of a compressed im-
age representation of the volume, via a rank pooling
of volume slices. We show that such ranked volume
images can be used as part of a neural network ap-
proach to improve image synthesis results.
The contributions of this work are as follows:
• We are the first to demonstrate a neural network
approach to synthesising light fields for volume
visualizations.
• To exploit the availability of the volumetric data,
we propose the use of a compressed representa-
tion of dense real-valued volumetric data. This
avoids the prohibitive cost of 3D convolutional fil-
ters for real-time performance and is shown to im-
prove image synthesis results.
• Our neural network approach, generating a light
field of angular resolution 6 × 6, performs at real-
time rates, significantly reducing the time taken
using traditional ray-tracing techniques.
• We prepare and release two datasets for future
use in tackling this problem. All experimental
code and data appears in our code repository
(https://github.com/leaveitout/deep
light field interp).
We envisage that the compressed volume repre-
sentation may have uses in other volume visualization
problems and intend to examine such solutions in fu-
ture work.
2 RELATED WORK
Convolutional neural networks (CNNs) have under-
gone a significant renaissance in recent years, and
since their application to image classification tasks
(Krizhevsky et al., 2012) the nonlinear complexity
that can be modelled by a CNN has been shown to be
useful for many image generation tasks (Park et al.,
2017; Liu et al., 2017; Zhou et al., 2016). Techniques
for the generation of images based on an input im-
age, often utilise flow or disparity information. In the
closely-related case of light field viewpoint genera-
tion, an estimate of disparity has been integrally used
to generate viewpoint images using deep learning ap-
proaches (Kalantari et al., 2016; Srinivasan et al.,
2017). Optical flow has been used as part of novel
view synthesis techniques (Zhou et al., 2016) and as
part of video interpolation techniques to guide pixel
determination from a pair of images (Liu et al., 2017).
Another recent technique of video interpolation does
not rely on flow information, but rather on learning
global convolutional filters that operate on the pair of
images to be interpolated (Niklaus et al., 2017). These
approaches are developed, however, for the purposes
of generating natural images and so do not make use
of data being visualized, as in our case.
Convolutional architectures for the specific pro-
cessing of volumetric data have been developed (Wu
et al., 2015; Maturana and Scherer, 2015). These ini-
tial works made use of 3D convolutional neural net-
works as natural extensions of 2D convolutional net-
works. It was observed, however, that this leads to
an increase in convolutional filter size, hence requir-
ing more data for training and precluding deeper net-
works under a fixed computation budget (Qi et al.,
2016). Furthermore, 3D CNNs were outperformed by
2D CNNs trained on multiple views for object recog-
nition tasks (Su et al., 2015). Other techniques for
Synthesising Light Field Volumetric Visualizations in Real-time using a Compressed Volume Representation
97

efficient learning from volumetric data have utilised
probing techniques (Li et al., 2016), tree representa-
tions (Wang et al., 2017b; Riegler et al., 2017; Klokov
and Lempitsky, 2017) and point cloud representations
(Qi et al., 2017). Each of these approaches assume
a binary occupancy volume and have not yet been
shown to work with real-valued volumes or indeed
multi-dimensional volumes.
Ranking is a commonly used machine learning
task encountered in information retrieval. Image fea-
tures extracted from video frames (Fernando et al.,
2017) have been ranked according to their temporal
order. The ranking representation allows videos of
variable lengths to be encoded into a fixed size de-
scriptor that can then be used for classification tasks,
such as action recognition. Recently, this technique
has been adapted for use on pixel data (Bilen et al.,
2016), with the ranking descriptor taking the form of
a single image, a compressed representation of the dy-
namics of the video. This “dynamic image” represen-
tation has been shown to benefit action recognition
pipelines when trained on colour, optical flow, and
scene flow information (Wang et al., 2017a). Such
ranking representations have yet to be applied to vol-
umetric information as part of a visualisation pipeline.
We show in this work, that these representations are
effective in extracting details from volume data to im-
prove image synthesis quality.
A number of previous works have focussed on the
specific topic of rendering volumetric data for light
field displays (Mora et al., 2009; Birklbauer and Bim-
ber, 2012). One work looks at volume rendering using
emissive volumetric displays and addresses the inher-
ent challenges of using such a display for this purpose
(Mora et al., 2009). Volume rendering for light fields
has also been performed on other specific light field
displays (Agus et al., 2009). This method iteratively
refines a rendering when the viewpoint changes and
is thus susceptible to slow rendering when the view-
point changes significantly. Another work speeds up
volume rendering for light fields by maintaining a
render cache, based on the current viewpoint, that is
filled during idle times and used to compose the fi-
nal renders (Birklbauer and Bimber, 2012). Our work
seeks to make light field volume rendering tractable
for large display sizes, and independent of viewpoint,
by using a neural network approach to increase the
angular resolution.
3 METHOD
Here, we detail our approach of synthesising light
field viewpoint images using a subset of rendered
Figure 1: Volume ranked images calculated across entire
coordinate axes for a volume dataset of a magnetic reso-
nance imaging scan of a person’s head. The entropy-order
images of the top row appear to capture greater detail than
appears in the bottom row of axis-order images. In partic-
ular, we observe that the axis-order representation devotes
more features to discriminating elements such as the nose
and ear, and less to internal structures. Here, the images
are encoded in a single image, however, it is possible to use
more than one image in our final encoding, where we will
test whether entropy or order is more effective as part of our
synthesis method.
viewpoints and a compressed volume representation.
We first describe how we formulate these compressed
volume representations, before describing how it is
used in our neural network architecture to synthesise
the images.
3.1 Volumetric Representation
The rank pooling method of generating a compressed
representation of a video sequence is applied to a
dense volume to produce the volumetric equivalent
of a dynamic image (Bilen et al., 2016). Describ-
ing the volume, V , as a sequence of ordered slices
[v
1
, .. . , v
n
], we let ψ(v
t
) ∈ R
d
be a representation of
an arbitrary slice. In our case, we use the slice infor-
mation itself, and so ψ(v
t
) = v
t
. Pairwise linear rank-
ing is characterised by parameters u ∈ R
d
, such that a
ranking function S(t|u) = u
T
· v
t
produces a score for
the slice at t. As such, u as a matrix that when multi-
plied by a slice v
t
, outputs a score indicating the rank
of this slice.
The parameters u are optimised such that the
given ordering of the slices is represented in the
scores, i.e. q > p =⇒ S(q|u) > S(p|u). Such an op-
timisation can be formulated as a convex problem and
solved using Rank Support Vector Machines (Smola
and Schlkopf, 2004):
u
∗
= ρ(v
1
, . . . , v
n
;ψ) = argmin
u
E(u) (1)
IVAPP 10th International Conference on Information Visualization Theory and Applications - 10th International Conference on Information
Visualization Theory and Applications
98

E(u) =
2
n(n − 1)
×
∑
q>p
max{0, 1 − S(q|u) + S(p|u)}
+
λ
2
kuk
2
(2)
In Equation 1, we see that the optimal repre-
sentation, u
∗
, is a function of the slices, v
1
, . . . , v
n
and the representation type ψ. This can be framed
as an energy minimisation of the energy term E(u).
The first term in Equation 2 is the hinge-loss soft-
counting of the number of incorrectly ranked pairs,
and the second term is the quadratic regularization
term of support vector machines, where the regular-
ization is controlled by hyperparameter λ. The hinge-
loss soft-counter term ensures that there is at least unit
score difference between correctly ranked pairs, i.e.
S(q|u) > S(p|u) + 1.
The optimised ranking representation u
∗
thus en-
codes information regarding the ordering of the vol-
ume slices and can be seen as the output of a function
ρ(v
1
, . . . , v
n
;ψ) that maps an arbitrarily sized volume
to a smaller size representation. Furthermore, this
representation is 2D and so 2D CNNs can be used to
learn from the volume data, instead of expensive 3D
CNNs if we were to learn from the volume directly.
In our volumetric representation, we seek com-
plex features present in the volume to persist in the
compressed representation. Thus, in addition to cal-
culating volumetric representations based on a rank-
ing of the order of slices along an axis, we propose
an alternative ranking method. This ranking is per-
formed according to the Shannon entropy of the slice,
H = −
∑
i
p
i
log p
i
, where p
i
is the normalised proba-
bility of a specific cell value in a slice. Entropy pro-
vides a heuristic of the complexity of the slice and
thus the ranking learns to discriminate this aspect,
rather than the arbitrarily positive or negative axis or-
der. In Figure 1, we show example images for the
two ranking formulations. We shall refer to the com-
pressed volume representations for axis-order rank-
ing and for entropy ranking as Order-Ranked Volume
Images (ORVI) and Entropy-Ranked Volume Images
(ERVI), respectively.
3.2 Viewpoint Synthesis
In our problem formulation, we assume that a subset
of the viewpoint images of the light field are rendered
using traditional ray-tracing approaches. We select as
this subset the four corner images of the light field ar-
ray as per Figure 2. We wish to efficiently synthesise
all the remaining viewpoint images. In recent work
(Kalantari et al., 2016), a convolutional autoencoder
approach was shown capable of performing such im-
age synthesis problems for a single viewpoint image
in light field photographs. We thus investigate such
solutions for our problem of synthesising an entire
light field.
By estimating scene geometry, it is possible to
generate an entire light field for natural images from a
single input image (Srinivasan et al., 2017). However,
as a mapping between pixel values in a pair of light
field volume renderings with varying alpha values is
not injective (one-to-one), disparity or flow-based ap-
proaches of image interpolation are not ideal. Hence,
our network cannot rely on the presence or calculation
of these features.
Instead, we use a more direct approach of interpo-
lating between the rendered images, using a convolu-
tional autoencoder architecture. This architecture is
composed of successive dimension reducing encoder
blocks and dimension increasing decoder blocks. For
the design of these blocks, we follow the proven or-
der of operations for the similar problem of video
frame interpolation (Niklaus et al., 2017). In an En-
coder block, the order of operations is a convolution
with 3 × 3 filter, Rectified Linear Unit (ReLU) acti-
vation ( f (x) = max(0, x)), followed by another con-
volution, ReLU activation, and a final average pool-
ing with 2 × 2 window and stride of 2. The second
convolutional operation maintains an equal number of
output channels as the previous convolutional opera-
tion. A Decoder block differs in that instead of an av-
erage pooling operation, a bilinear upsampling filter
is applied to double the output dimensions, followed
by convolution and ReLU operations. The convolu-
tion operations again maintain the number of output
channels. Bilinear sampling has the advantage of be-
ing differentiable, thus permitting back propagation
through the entire network.
As a baseline, we compose a network architecture
that takes as input solely the rendered visualisation
images. We refer to this approach as Light Field Syn-
thesis Network - Direct (LFSN-Direct). The number
of input and output features of the Encoder and De-
coder blocks in this architecture, which determine the
number of convolutional filters according the above
block definitions, are shown in Table 1.
In the architecture, residual connections (He et al.,
2016) are used between Encoder and Decoder blocks
to encourage less blurry results. Residual connections
formulate the intervening operations between a con-
nection as a function, F , that is tasked with learning
the change (or residual) required to the input, x, to
improve the output y, i.e.
y = F (x) + x, (3)
rather than being tasked with learning the entire out-
Synthesising Light Field Volumetric Visualizations in Real-time using a Compressed Volume Representation
99
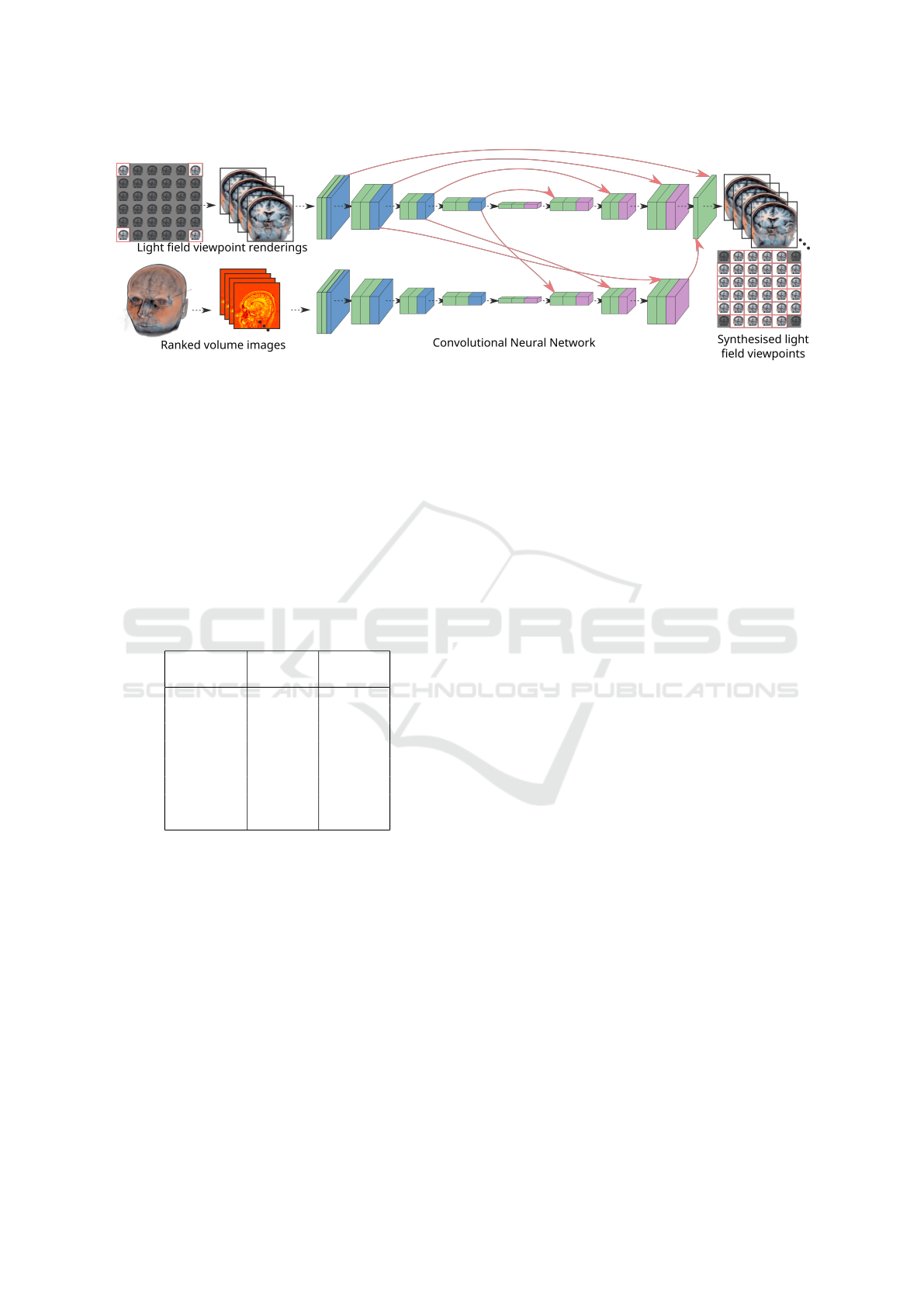
Figure 2: An illustration of the convolutional autoencoder architecture used to synthesise light field viewpoint images. One
network operates on rendered views, while the other operates on ranked volume images. In the network, green represents a
convolutional layer, blue an average pooling layer, purple a bilinear upsampling layer and red arrows represent skip connec-
tions.
put. Connections are made between the output of the
final convolution of the Encoder block and the final
output of the Decoder block, for corresponding block
numbers in Table 1.
Table 1: The network structure for the Light Field Synthe-
sis Network. The number of input features of the network
corresponds to four RGBA images concatenated along the
channel dimension, representing the rendered images. The
number of output features of the network corresponds to 32
RGBA images concatenated along the channel dimension,
representing the 32 remaining images of the 6 ×6 light field.
Block # input
features
# output
features
Encoder 1 16 32
Encoder 2 32 64
Encoder 3 64 128
Encoder 4 128 256
Decoder 4 256 256
Decoder 3 256 128
Decoder 2 128 128
Decoder 1 128 128
Residual connections are made using an addition
operation, and thus it is required that both operands
are of the same dimension. As can be seen in Ta-
ble 1, the number of output features do not match be-
tween all corresponding Encoder and Decoder blocks
for residual connections. The Decoder blocks have a
larger number of output features to facilitate the gen-
eration of the larger number of output images. To
overcome this, we repeat the outputs of the corre-
sponding convolution operation in the Encoder block
along the channel dimension before addition to the
output of the Decoder block. For example, the resid-
ual connection between Encoder 1 and Decoder 1 re-
quires that the output of the convolution operation
is repeated four times. Using the same notation as
above, this residual connection can be expressed as
y = F (x) + [x, x, x, x]. (4)
This concatenation of the input may have potential
benefits as it would encourage Encoder 1 to learn fea-
tures that output an x that is more generally applicable
across the light field due to the joint effect of x upon
multiple output images.
We introduce a parallel network branch to learn
from ranked volume image representations, as shown
in Figure 2. This network branch has identical En-
coder and Decoder blocks to the LFSN-Direct net-
work, apart from the Encoder 1 block which may
have a different number of input features. This is de-
pendent upon the number of ranked volume images
used to encode a volume. We refer to this network ar-
chitecture as LFSN-ORVI or LFSN-ERVI, depend-
ing on whether ORVI or ERVI images are used, re-
spectively. In addition to those described previously,
residual connections are used in this architecture to
connect the branch processing the rendered images
(render branch) to the branch processing the ranked
volume images (volume branch). These connections
are made between corresponding Encoder blocks in
the render branch and Decoder blocks in the volume
branch. The final output of the volume branch is
added to the output of the render branch. This en-
courages the volume branch to learn to specifically
generate the additional details that cannot be gener-
ated from the rendered images alone.
4 IMPLEMENTATION
To demonstrate applicability to a specific use case, we
restrict our datasets to two visualizations of a mag-
netic resonance imaging volume of a human, one of
IVAPP 10th International Conference on Information Visualization Theory and Applications - 10th International Conference on Information
Visualization Theory and Applications
100

Figure 3: An example light field rendering for the MRI-
Head dataset.
the torso and one of the head referred to as MRI-Head
and MRI-Torso, respectively. The Interactive Visual-
ization Workshop (Sunden et al., 2015) was used to
create each dataset. Virtual cameras were arranged in
a planar 6 × 6 array, with optical axes parallel and a
fixed spacing between adjacent cameras. 2,000 sets of
light field visualizations were collected for each, with
spatial resolution of 256 × 256. To expose the inter-
nal structures of the volume, and increase the number
of alpha-blended image components, the MRI-Head
volume was clipped along 400 different planes and 5
light field images were captured at randomized cam-
era locations for each different clipping. The clipping
planes were selected as plausible planes for inspection
purposes.
The transfer function was kept fixed throughout
collection of each dataset. For the MRI-Torso dataset,
we include global illumination effects and an ex-
tracted isosurface to make the synthesis problem more
challenging.
For each dataset, we need to select an axis along
which to calculate the ranked volume images. We se-
lect the side profile axis for the MRI-Head dataset and
the front profile axis for the MRI-Torso dataset. The
ERVI images were calculated using the entropy val-
ues of volume slices along the chosen axis. Ranked
volume images were calculated for sets of adjacent
sub-volumes of sizes 16 × 256 × 256 and concate-
nated to form the compressed representation. This
represents a compression rate of 16 times compared
to the full volumetric data. Here, a trade-off is made
between compressing the volumetric information and
minimising the training and inference cost. This cost
increases due to the first convolutional layer in the
Encoder 1 block in the volume branch, which is pro-
portional to the number of input ranked volume im-
ages. Ranked volume image calculated across the en-
tire volume can be seen in Figure 1.
To train the network, we use images from four
corner cameras of the light field array as inputs. The
network is trained to output the remaining 32 images
of the light field of angular resolution of 6 × 6. The
dataset was split into 1,600 sets of training images,
with the final 400 reserved for testing. The network is
trained for a total of 250 epochs based on observations
of overfitting if trained further.
To train the network, the Adamax learning rate
scheduler was used with the recommended parame-
ters (Kingma and Ba, 2015). The data was trans-
formed to lie in the [0, 1] range prior to use during
training. Batch normalisation was found to adversely
affect results and so is not used. The loss function
used was
L
1
= kI − I
gt
k
1
(5)
where I and I
gt
are the synthesised and ground truth
light field images respectively.
The Pytorch framework was used for training all
the neural network models, and the networks were
trained on a Nvidia Titan V card. To improve the
speed of training and inference, and to reduce mem-
ory requirements, we use half-precision floating point
representations for our entire network.
5 EVALUATION
5.1 Qualitative
We inspect the outputs of the three tested approaches
to compare their performances qualitatively. We note,
expectedly, that internal light field viewpoint images
perform worse, with images appearing more blurred
as the distance from the input rendered images in-
creases.
In the case of the MRI-Head model, all models
perform well and it is difficult to distinguish any ren-
dering artefacts. On inspection of Mean Average Er-
ror images, however, we do note that the edges of sur-
faces are synthesised more accurately with the LFSN-
ORVI and LFSN-ERVI models.
In the case of the MRI-Torso model, the LFSN-
ORVI and LFSN-ERVI models perform markedly
better, as can be seen in Figure 4. The finer details ap-
pear sharper overall than the LFSN-Direct approach
in these images, however a slight blur effect is notice-
able across all three model outputs. This may be due
Synthesising Light Field Volumetric Visualizations in Real-time using a Compressed Volume Representation
101
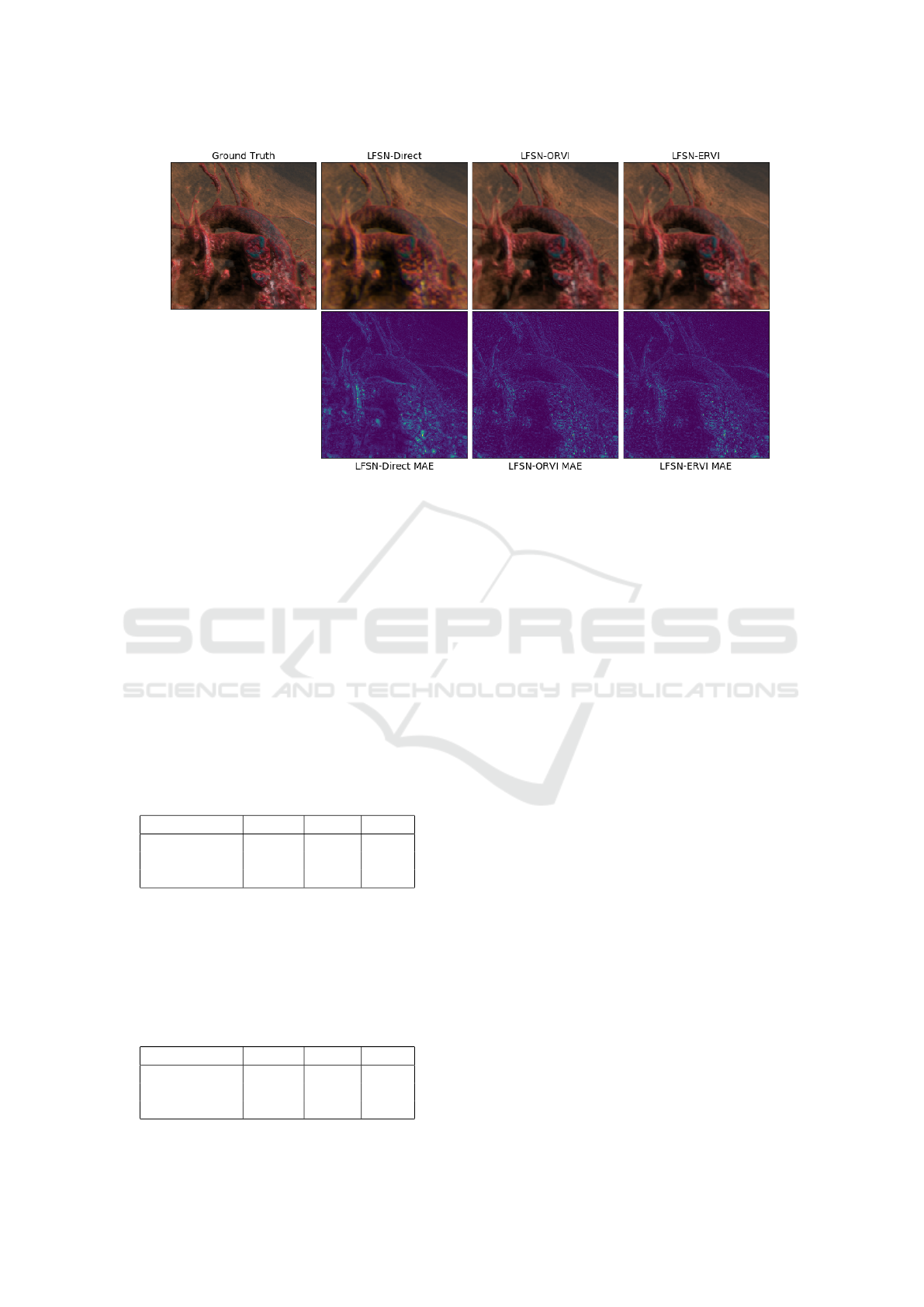
Figure 4: Result images of the viewpoint synthesis methods for the MRI-Torso dataset, generating the light field viewpoint at
(3, 3) in the angular dimension. Synthesised images appear slightly blurry compared to the ground truth rendering, specifically
the LFSN-Direct result. Inspecting the Mean Average Error (MAE), we see that overall the LFSN-ORVI and LFSN-ERVI
produce sharper images, with their errors more contained within specific difficult regions, such as specular areas.
to the use of the L
1
loss for training, as has been ob-
served in other works (Niklaus et al., 2017). Further
example output images are shown in Figure 5.
5.2 Quantitative
To evaluate our technique quantitatively, we calculate
Structural Similarity (SSIM), Peak Signal to Noise
(PSNR) and Mean Squared Error (MSE) metrics for
the synthesised test set images against the ground
truth.
Table 2: Metrics calculated for the test set of images on
MRI-Head dataset.
Network type SSIM PSNR MSE
LFSN-Direct 0.9795 35.98 16.89
LFSN-ORVI 0.9906 40.22 6.33
LFSN-ERVI 0.9886 39.38 7.67
Our results for the MRI-Head dataset are pre-
sented in Table 2. It was found that the additional
information available via the ranked volume images
increased performance, however only marginally. In
Table 3: Metrics calculated for the test set of images on
MRI-Torso dataset.
Network type SSIM PSNR MSE
LFSN-Direct 0.9182 34.78 27.86
LFSN-ORVI 0.9408 36.87 17.72
LFSN-ERVI 0.9417 36.90 17.35
this case, The axis ordered representation outperforms
entropy, which may indicate that it encodes the vol-
ume data better when split into smaller sub-volumes.
Our results for the MRI-Torso data are presented
in Table 3. This dataset is shown to be more chal-
lenging for the LFSN-Direct to synthesise. The pres-
ence of isosurface meshes and global illumination
are likely responsible for the lower metrics overall.
We note that the two ranked volume models outper-
form the baseline approach to a greater margin in this
case. This indicates that the volume branch of the net-
work is effective at learning to generate missing de-
tails from the ranked volume representation. We note
that in this case, the LFSN-ERVI outperforms LFSN-
ORVI. The difference is small, however, and as such
further investigation on optimal methods of ordering
the volume slices may be warranted.
5.3 Performance Speed
A key aspect to consider is the speed at which images
can be generated. For a neural network approach to
light field synthesis for volume visualisation to be fea-
sible, it needs to significantly improve upon the time
taken to render the light field using a traditional ap-
proach. To measure this, we recorded the time to ren-
der all light field images in the MRI-Torso dataset.
We use the same computer, under similar load, with
Nvidia Titan V graphics card used for both the light
field synthesis and rendering timings. The approach
that we compare against (called Baseline in Table 4)
IVAPP 10th International Conference on Information Visualization Theory and Applications - 10th International Conference on Information
Visualization Theory and Applications
102

Figure 5: Result images of the viewpoint synthesis methods for the MRI-Torso dataset (top one) and MRI-Head dataset
(bottom two), generating the light field viewpoint at (3, 3) in the angular dimension. It is difficult to determine artefacts for
the bottom two, however, the Mean Average Error images indicate better performance by LFSN-ORVI and LFSN-ERVI with
regards to edges present in the data.
Synthesising Light Field Volumetric Visualizations in Real-time using a Compressed Volume Representation
103
uses ray-tracing as part of the volume rendering, as
implemented in the Interactive Visualization Work-
shop.
Table 4: The timing of the different approaches of out-
putting an entire light field for the MRI-Torso dataset. The
timing is calculated as the average over the entire test set
of 400 light fields. The errors are reported as the standard
deviation over the test set. Note that we include the time to
render the four corner images as part of all LFSN variants.
This amounts to a time of 0.08 seconds on average.
Network type Time (s)
Baseline 0.716 ± 0.223
LFSN-Direct 0.092 ± 0.026
LFSN-ORVI 0.097 ± 0.026
LFSN-ERVI 0.097 ± 0.026
The results in Table 4 show that we substantially
reduce the time taken to generate a light field. The
LFSN-ORVI and LFSN-ERVI increase frames rates
by a multiplier of seven, bringing frame rates to
greater than 10 frames per second. Each of the neural
network synthesis methods synthesise images in fixed
timings due to the network acting as a fixed operation
once trained. This property will also be maintained
across dataset complexity and size, as along as size of
the input images to the network are maintained. In the
above results, we note that the majority of time taken
for the LFSN variants is spent rendering the four cor-
ner images. Thus if further speed improvements are
required, we should investigate methods of removing
the requirement of these rendered corner images.
6 CONCLUSIONS AND FUTURE
WORK
In this work, we proposed the use of convolutional
neural networks to synthesise views of dense volu-
metric data for applications of light field rendering.
We propose the use of a ranked volume representation
to allow a network access to the available volumetric
data to improve synthesis results. We have demon-
strated that this approach improves synthesis results,
moreso for a more challenging dataset that we col-
lected. A key advantage of this approach is the speed
with which a light field can be synthesised, making
real-time light field generation achievable. As part of
this work we also release the code and data to encour-
age other researchers to tackle this and other related
problems in volume visualization.
We demonstrated our work for visualisation tasks
involving medical imaging data. In this domain, there
may be concerns with using such a predictive ap-
proach for visual inspection of data. For example, the
network may synthesise images that are missing iden-
tifying properties of a tumour that is present in the
data. This represents a key challenge for the type of
approach introduced in this work. Future work could
address this challenge by improving performance to
within an acceptable limit on a range of datasets, or
by characterising uncertainty in the synthesised im-
ages.
In future work, we wish to explore other ap-
proaches of synthesis, perhaps by generating coarse
synthesis estimates via geometrical heuristics, prior
to refinement with a neural network. The proposed
pipeline for visualization is not restricted to light field
applications. In future work, we hope to demonstrate
the applicability of the technique to frame extrapo-
lation, potentially leading to increased visualization
frame rates. Further avenues of investigation include
extending the technique to work for time-varying vol-
umetric data.
ACKNOWLEDGEMENTS
The authors would also like to thank the anonymous
referees for their valuable comments and helpful sug-
gestions. This research has been conducted with the
financial support of Science Foundation Ireland (SFI)
under Grant Number 13/IA/1895.
REFERENCES
Agus, M., Bettio, F., Giachetti, A., Gobbetti, E., Igle-
sias Guitin, J. A., Marton, F., Nilsson, J., and Pin-
tore, G. (2009). An interactive 3d medical visualiza-
tion system based on a light field display. The Visual
Computer, 25(9):883–893.
Bilen, H., Fernando, B., Gavves, E., Vedaldi, A., and Gould,
S. (2016). Dynamic image networks for action recog-
nition. In 2016 IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), pages 3034–3042.
Birklbauer, C. and Bimber, O. (2012). Light-field supported
fast volume rendering. In ACM SIGGRAPH 2012
Posters on - SIGGRAPH ’12, page 1, Los Angeles,
California. ACM Press.
Fernando, B., Gavves, E., M, J. O., Ghodrati, A., and Tuyte-
laars, T. (2017). Rank pooling for action recognition.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 39(4):773–787.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 770–778.
Kalantari, N. K., Wang, T.-C., and Ramamoorthi, R. (2016).
Learning-based view synthesis for light field cameras.
ACM Trans. Graph., 35(6):193:1–193:10.
IVAPP 10th International Conference on Information Visualization Theory and Applications - 10th International Conference on Information
Visualization Theory and Applications
104

Kingma, D. P. and Ba, J. (2015). Adam: A method for
stochastic optimization. In Proceedings of the 3rd In-
ternational Conference on Learning Representations
(ICLR), San Diego.
Klokov, R. and Lempitsky, V. (2017). Escape from cells:
Deep kd-networks for the recognition of 3d point
cloud models. In Computer Vision (ICCV), 2017 IEEE
International Conference on, pages 863–872. IEEE.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Pereira, F., Burges, C. J. C., Bottou,
L., and Weinberger, K. Q., editors, Advances in Neu-
ral Information Processing Systems 25, pages 1097–
1105. Curran Associates, Inc.
Lanman, D. and Luebke, D. (2013). Near-eye light field dis-
plays. In ACM SIGGRAPH 2013 Emerging Technolo-
gies, SIGGRAPH ’13, pages 11:1–11:1, New York,
NY, USA. ACM.
Levoy, M. and Hanrahan, P. (1996). Light field render-
ing. In Proceedings of the 23rd Annual Conference
on Computer Graphics and Interactive Techniques,
SIGGRAPH ’96, pages 31–42, New York, NY, USA.
ACM.
Li, Y., Pirk, S., Su, H., Qi, C. R., and Guibas, L. J. (2016).
Fpnn: Field probing neural networks for 3d data.
In Proceedings of the 30th International Conference
on Neural Information Processing Systems, NIPS’16,
pages 307–315, USA. Curran Associates Inc.
Liu, Z., Yeh, R. A., Tang, X., Liu, Y., and Agarwala, A.
(2017). Video frame synthesis using deep voxel flow.
In 2017 IEEE International Conference on Computer
Vision (ICCV), pages 4473–4481.
Maturana, D. and Scherer, S. (2015). Voxnet: A 3d convolu-
tional neural network for real-time object recognition.
In 2015 IEEE/RSJ International Conference on Intel-
ligent Robots and Systems (IROS), pages 922–928.
Mora, B., Maciejewski, R., Chen, M., and Ebert, D. S.
(2009). Visualization and computer graphics on
isotropically emissive volumetric displays. IEEE
Transactions on Visualization and Computer Graph-
ics, 15(2):221–234.
Niklaus, S., Mai, L., and Liu, F. (2017). Video frame inter-
polation via adaptive separable convolution. In 2017
IEEE International Conference on Computer Vision
(ICCV), pages 261–270.
Park, E., Yang, J., Yumer, E., Ceylan, D., and Berg, A. C.
(2017). Transformation-grounded image generation
network for novel 3d view synthesis. In 2017 IEEE
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 702–711.
Philips, S., Hlawitschka, M., and Scheuermann, G. (2018).
Slice-based visualization of brain fiber bundles - a lic-
based approach. pages 281–288.
Qi, C. R., Su, H., Niessner, M., Dai, A., Yan, M., and
Guibas, L. J. (2016). Volumetric and multi-view cnns
for object classification on 3d data. arXiv:1604.03265
[cs].
Qi, C. R., Yi, L., Su, H., and Guibas, L. J. (2017). Point-
net++: Deep hierarchical feature learning on point sets
in a metric space. arXiv:1706.02413 [cs].
Riegler, G., Ulusoy, A. O., and Geiger, A. (2017). Octnet:
Learning deep 3d representations at high resolutions.
In The IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR).
Smola, A. J. and Schlkopf, B. (2004). A tutorial on sup-
port vector regression. Statistics and Computing,
14(3):199–222.
Srinivasan, P. P., Wang, T., Sreelal, A., Ramamoorthi, R.,
and Ng, R. (2017). Learning to synthesize a 4d rgbd
light field from a single image. In 2017 IEEE Interna-
tional Conference on Computer Vision (ICCV), pages
2262–2270.
Su, H., Maji, S., Kalogerakis, E., and Learned-Miller, E.
(2015). Multi-view convolutional neural networks for
3d shape recognition. In Proceedings of the 2015
IEEE International Conference on Computer Vision
(ICCV), ICCV ’15, pages 945–953, Washington, DC,
USA. IEEE Computer Society.
Sunden, E., Steneteg, P., Kottravel, S., Jonsson, D., En-
glund, R., Falk, M., and Ropinski, T. (2015). Inviwo
- an extensible, multi-purpose visualization frame-
work. In 2015 IEEE Scientific Visualization Confer-
ence (SciVis), pages 163–164.
Wang, P., Li, W., Gao, Z., Zhang, Y., Tang, C., and Ogun-
bona, P. (2017a). Scene flow to action map: A new
representation for rgb-d based action recognition with
convolutional neural networks. In 2017 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 416–425.
Wang, P.-S., Liu, Y., Guo, Y.-X., Sun, C.-Y., and Tong, X.
(2017b). O-cnn: Octree-based convolutional neural
networks for 3d shape analysis. ACM Trans. Graph.,
36(4):72:1–72:11.
Wetzstein, G., Lanman, D., Hirsch, M., and Raskar, R.
(2012). Tensor displays: Compressive light field syn-
thesis using multilayer displays with directional back-
lighting. ACM Trans. Graph., 31(4):80:1–80:11.
Wu, Z., Song, S., Khosla, A., Yu, F., Zhang, L., Tang, X.,
and Xiao, J. (2015). 3d shapenets: A deep representa-
tion for volumetric shapes. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 1912–1920.
Zhou, T., Tulsiani, S., Sun, W., Malik, J., and Efros, A. A.
(2016). View synthesis by appearance flow. In Com-
puter Vision - ECCV 2016, Lecture Notes in Computer
Science, pages 286–301. Springer, Cham.
Synthesising Light Field Volumetric Visualizations in Real-time using a Compressed Volume Representation
105
