
Towards Model-driven Verification of Robot Control Code using
Abstract Syntax Trees in Production Systems Engineering
Kristof Meixner
1
, Dietmar Winkler
1
, Petr Nov
´
ak
2
and Stefan Biffl
3
1
Christian Doppler Laboratory for Security and Quality Improvement in the Production System Lifecycle,
TU Wien, Vienna, Austria
2
Czech Institute of Informatics, Robotics, and Cybernetics, Czech Technical University in Prague, Czech Republic
3
Information & Software Engineering Group, Institute of Information Systems Engineering, TU Wien, Vienna, Austria
Keywords:
Production Systems Engineering, Industrial Robots, Verification and Validation, Engineering Models,
Abstract Syntax Tree.
Abstract:
Context. In Production Systems, software components are often tightly connected to defined hardware device
types like robots. Different types of robots, even from the same vendor, often use vendor-specific programming
languages. Therefore, the exchange of devices or device types, e.g., during system evolution, is challenging
and needs new or adapted control software and repeated verification and validation process steps, even if the
software behavior remains unchanged. Models aim at supporting these verification and validation tasks during
system evolution. Objective. This position paper aims at providing a verification and validation process ap-
proach with models for supporting automation systems maintenance and evolution processes. For evaluation
purposes, we report on a feasibility study with a focus on two selected robot types in the context of Produc-
tion Systems Engineering (PSE). Method. We use the Abstract Syntax Tree (AST) concept as a foundation for
generating models as the basis for human-based verification and validation. Based on two generated AST vari-
ants, related to old and new software control code, human experts can compare the behavior of the expected
system to verify and validate the code. Results. First results showed the feasibility of the AST concept to
support human-based verification and validation in the context of PSE maintenance projects on a structural
level. Conclusion. Although the human-based verification and validation process is feasible and promising on
a structural level, the complexity of AST for large-scale models needs to be addressed by tool support to over-
come complexity levels of the production system and limitations of human-based verification and validation.
1 INTRODUCTION
The increasing share of software code in PSE projects
require appropriate testing approaches (Schafer and
Wehrheim, 2007) to evaluate the expected behav-
ior of the production system. A production system
typically includes production resources, like robots,
shuttles, conveyors, or specified tools to produce a
product (Chan and Spedding, 2003). Fig. 1 shows
a schematic overview of a production system with a
rail conveyor and four robots, located at the Czech
Technical University in Prague
1
. During the engineer-
ing of production systems typical engineering pro-
cesses, such as waterfall-like or V-model like pro-
cess approaches are applicable (Wasson, 2015). Com-
mon process steps include requirements elicitation
and systems design, system construction, implemen-
1
Testbed 4.0: www.ciirc.cvut.cz/testbed
tation, test and commissioning as well as operation
and maintenance (Winkler et al., 2017). Maintenance
engineers execute tasks like regular services, repair,
or evolution of the system in the system maintenance
phase. In PSE, individual devices often use vendor-
specific programming languages to implement the re-
quired logical behavior of the device, e.g., of a robot.
In practice, we observed various programming lan-
guages even for robots manufactured by the same ven-
dor. Thus, during the evolution of the system, e.g., ex-
changing a robot or upgrading it from one version to
another, control code must be manually rewritten, ver-
ified and validated. Therefore, these human-based ac-
tivities are time-consuming and error-prone and could
lead to significant downtimes of the system. Nev-
ertheless, a structured human inspection task based
on models can help to improve this process (Aurum
et al., 2002).
402
Meixner, K., Winkler, D., Novák, P. and Biffl, S.
Towards Model-driven Verification of Robot Control Code using Abstract Syntax Trees in Production Systems Engineering.
DOI: 10.5220/0007484104020409
In Proceedings of the 7th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2019), pages 402-409
ISBN: 978-989-758-358-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
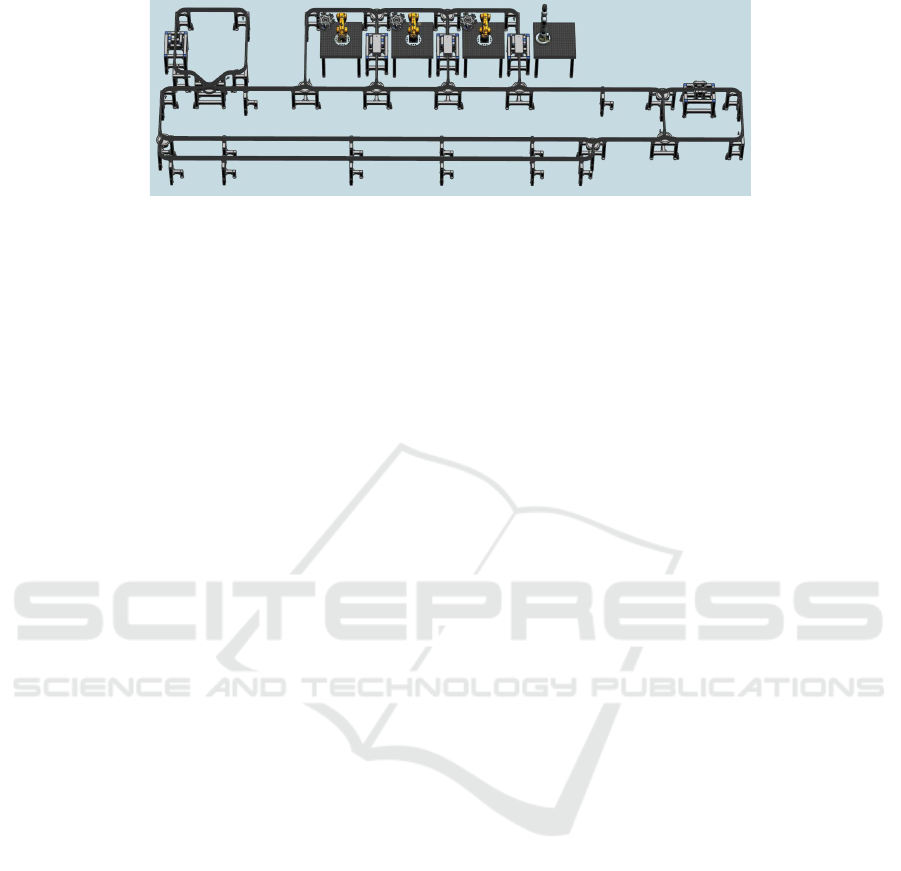
Figure 1: Industry 4.0 Testbed used as a use-case.
In this position paper, we address the key ques-
tion, how to verify and validate the behavior of
the system of different robot control code imple-
mentations to improve system maintenance and evo-
lution and to support quality assurance experts and
engineers in their verification and validation process.
Therefore, we propose a model-driven verification
and validation approach that makes the evaluation of
software control code more effective and efficient.
Furthermore, we conceptually evaluate the proposed
approach in a feasibility study in a real-world indus-
try setting, i.e., exchanging a robot in an existing pro-
duction system within a system evolution project.
The key idea is to abstract from the software con-
trol codes and evaluate generated abstract representa-
tions in a human-based review process step: (a) au-
tomatically generate AST models based on existing
software control code, i.e., an AST model based on the
previous version of the robot control code and an AST
model based on the newly written control code; and
(b) compare both AST variants for deviations in the
code structure. As both robot control programs aim
to address similar requirements and system behavior,
both AST variants have to follow a similar structure,
depending on the programming language. Deviations
could represent defects that need to be addressed be-
fore the deployment of the modified system. Note that
in the first step of this initial prototype, the compar-
ison task solely relies on human experts, i.e., a qual-
ity assurance engineer, who actually perform the ver-
ification and validation process step as part of a hu-
man inspection process. In the future of this research,
this process step is planned to be supported by tools.
Furthermore, we need to mention that the AST model
should be based on a shared model that uses generic
resp. common concepts (Winkler et al., 2017), to sup-
port a unified representation that allows implement-
ing tools that can be used for a variety of control lan-
guages.
To demonstrate the feasibility of the proposed ap-
proach, we use the “Industry 4.0 Testbed”, a testing
facility for evaluating new approaches and methods in
the context of the 4th industrial revolution (Biffl et al.,
2016). The most conspicuous part of the Industry 4.0
Testbed is a monorail transportation system Montrac,
see Fig. 1. On this rail system, several shuttles trans-
port small pallets with material, semi-products and fi-
nal goods from and to industrial robots. The system is
equipped with three KUKA KR Agilus robots and one
KUKA LBR iiwa robot (www.kuka.com), performing
production operations according to a given production
plan. Both types of robots use different programming
languages. Even if two robots of different types ex-
ecute a similar operation from the physical point of
view (similar systems behavior), their programs are
different concerning the programming language and
the program structure. If the production system con-
figuration changes, i.e., by exchanging one robot type
by another robot type, it is necessary to re-program
the robotic program. It requires significant human ef-
fort not only for re-programming but also for testing.
This position paper represents a starting point for
supporting engineers to make PSE projects more ef-
ficient and effective. In this paper, we focus on the
verification and validation process of robot software
code in the context of a system evolution process.
2 RELATED WORK
This section presents related work on PSE, models
used in the PSE domain, and ASTs as an represen-
tation of source code.
2.1 Production Systems Engineering
Production systems typically consist of mechatronic
objects and incorporate multiple engineering disci-
plines within the product life cycle (Moser et al.,
2012). Engineers of different disciplines use various
programming languages and various models for prob-
lem description and problem-solving. Synchroniza-
tion of related subsystems is typically executed by ap-
plying a bunch of interfaces that overcome technical
and semantic heterogeneity of tools and data models
Towards Model-driven Verification of Robot Control Code using Abstract Syntax Trees in Production Systems Engineering
403

(Winkler et al., 2017).
In context of a production system, the control
logic is typically implemented by a Programmable
Logic Controller (PLC). A family of PLC program-
ming languages is standardized as IEC 61131. Based
on this standard, PLC are normally programmed with
Structured Text, a programming language comparable
with PASCAL, ladder diagrams based on relay logic,
or function block diagrams (Collins, 2007). However,
there are numerous extensions and variations that are
vendor-dependent. Another standardization effort in
the frame of a standard PLCopen is trying to bridge
the gap between various PLC programming imple-
mentations
2
. Higher levels than PLCs are frequently
implemented with Python, C#, or Java, data acquisi-
tion can be implemented in the C language.
Industrial robotics typically utilizes proprietary
languages. For example, the robot vendor KUKA
(www.kuka.com) uses the language KRL for the tra-
ditional industrial robots, which represents the most
significant part of KUKA portfolio, whereas the new
advanced type of cooperative robots uses the Java lan-
guage. Due to the use of a large set of different pro-
gramming languages in PSE, the verification and val-
idation of correct operations and correct systems be-
havior are challenging. This is also an issue during
maintenance and evolution, and even minor updates
or changes of the system during production system
life-cycle implies high testing effort and costs.
Therefore, new approaches are needed for verifi-
cation of robot control code in PSE to be able to ver-
ify that corresponding code snippets in different lan-
guages are equivalent from the behavior point of view.
2.2 Models and Data Integration in PSE
Models for production systems can be represented in
various formats, such as XML-based representations,
one of the most commonly used data formats.
AutomationML
3
(Drath et al., 2008) is an XML-
based and standardized data format (IEC 62714) for
representing engineering knowledge in the area of
process automation and control. AutomationML aims
at integrating a set of growing standardized data rep-
resentations such as CAEX for plant topology infor-
mation (IEC 62424), COLLADA
4
for geometry and
kinematic information and PLCopen XML for logic
information.
The process of data integration in industrial au-
tomation is standardized in ISA-95 (Unver, 2012).
2
PLCOpen: www.plcopen.org/
3
AutomationML: www.automationml.org
4
COLLADA: www.khronos.org/collada
ISA-95 (resp. IEC 62264) and focuses on verti-
cal integration of automation tools and data mod-
els within the automation pyramid. However, ISA-
95 does not provide a communication language but
rather a methodology to define data models for the in-
tegration of MES and ERP systems.
Semantic models for industrial systems can be
represented in an OWL
5
ontology according to the
standard ISO 15926 (Kim et al., 2011). Although
the standard originally addressed issues in the oil and
gas industry, the concepts are applicable also in other
types of production systems. The original version of
the standard utilized EXPRESS language, but due to
its limited tool support, the OWL system description
was added, see online at the POSC Caesar Associa-
tion
6
for details.
2.3 Abstract Syntax Tree
Control software is written in various programming
languages including general-purpose ones such as
Python, C# , or Java; or particular specialized lan-
guages for robot, PLC, and other device program-
ming. As each of such programming languages uses
its specific syntax, the engineers implementing the
software need to understand these characteristics.
An Abstract Syntax Tree (AST) abstractly repre-
sents the essential formal structure of a software arti-
fact, by leaving out parts of the code which are spe-
cific to the programming language, like indention or
parentheses (OMG, 2011) (Jones, 2003).
As example, Fig. 3 shows on the middle left-hand
side parts of an AST of a switch-case statement that
switches a variable GI_PROG_NR. This abstract repre-
sentation of source code can support developers, who
are not familiar with a particular programming lan-
guage, to understand the behavior of a program.
To generate an AST out of source code, the code
first needs to be parsed with a parser for the spe-
cific language, like ANTLR (Parr and Quong, 1995),
and, afterward, be translated to a particular AST for-
mat. This format can either be a visual represen-
tation such as GraphML (Brandes et al., 2001) or
a model representation format such as EMF (Stein-
berg et al., 2008) for further processing of the AST. A
model representation, which has also be proven to be
successfully used for program analysis in the indus-
trial context (Grimmer et al., 2016), is the Abstract
Syntax Tree Model (ASTM) of the Object Manage-
ment Group (OMG) (OMG, 2011). Other approaches
were to parse the source code directly to an ontology
(Atzeni and Atzori, 2017) aiming at the generation of
5
OWL: www.w3.org/OWL
6
PCA: www.posccaesar.org/wiki/ISO15926inOWL
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
404

linked data from source code and querying these data
structures.
Using such a representation of a AST supported by
proper tools can help developers and engineers to effi-
ciently analyze code from different programming lan-
guages or even different domains. Therefore, this ap-
proach seems to be promising in PSE for effective and
efficient verification and validation of different robot
control code variants.
3 RESEARCH ISSUES
Based on the need for verification and validation sup-
port, discussions with industry experts, and related
work, we identified the following research questions.
RQ.1 How can a maintenance process support the
verification and validation of software control code
for different programming languages? After engi-
neering the production system, the second big phase
in the PSE life-cycle is the Operation & Maintenance
phase that includes control and change activities of
the production system during its run-time and aims
at optimizing the production processes (L
¨
uder et al.,
2017). In this phase, for example, worn off parts of a
production system such as robots need to be replaced
in a maintenance, modernization, or evolution project.
In the context of this paper we focus on exchanging
a robot type within a production system (using dif-
ferent programming languages) without changing the
behavior of the system. Thus, RQ.1 focuses on identi-
fying processes that enable the verification of control
software that is implemented in different program-
ming languages.
RQ.2 To what extent is the AST capable of sup-
porting PSE developers during the verification and
maintenance process? An AST represents the formal
structure of a program without the specifics of a pro-
gramming language, like indentation or punctuation
rules. The AST itself can be contained in a partic-
ular model or represented in different ways such as
tree structure, a graph-like visualization or an ontol-
ogy. However, programs in different languages can
also have different visualizations due to the particu-
lar keywords, method calls or the program structure.
Thus, RQ.2 focuses on characteristics that allow eval-
uating how an AST is capable of supporting engineers
during the verification process within a system main-
tenance project.
KUKA KR Agilus
KUKA LBR iiwa
Figure 2: Two types of robots in Industry 4.0 Testbed.
4 ILLUSTRATIVE USE CASE
In this section, we introduce an illustrative use case,
i.e., the “Industry 4.0 Testbed” that serves as a foun-
dation for illustrating the solution approach in the
context of a maintenance project. Fig. 2 illustrates the
use case including two different robot types within a
production system.
These two robot types consist of a KUKA KR Ag-
ilus and a KUKA LBR iiwa robot (see www.kuka.com
for more details). The key characteristics of the in-
volved robot types are: The KUKA KR Agilus robot
type is a fast industry robot frequently used in high-
performance environments such as car assembling in
the automotive industry sector. For safety and secu-
rity reasons, barriers, such as a cage or optical sen-
sors, are needed to prevent physical damage or human
injuries. KUKA KR Agilus uses the vendor-specific
KUKA WorkVisual IDE and the programming lan-
guage KRL. Fig. 3 shows a source code example of
KRL on the bottom left hand side.
The second robot type is a KUKA LBR iiwa, which
is able to cooperate with humans and its environment
and, thus, should not do any harm. Therefore, there
is no need for a safety zone, like a cage or optical
sensors. For programming, this robot type uses the
KUKA Sunrise Workbench IDE that is build on top of
the Eclipse Framework and Java as a programming
language.
The underlying use case focuses on a maintenance
and evolution project with the goal to exchange the
KUKA KR Agilus robot with the modern KUKA LBR
iiwa robot. The benefits of this evolution project
include: (a) that humans can cooperate with robot,
e.g., put raw material into the manufacturing line
or hand-over the final products without considering
robot safety zones; and (b) that humans can continu-
ously check the quality of semi-products and the man-
ufacturing process as they can inspect the robot from
Towards Model-driven Verification of Robot Control Code using Abstract Syntax Trees in Production Systems Engineering
405

a small distance (even within the safety zone).
Because both robot types should have similar
system behavior but use different programming lan-
guages, engineers have to rewrite, verify and validate
the robot control code from KRL (KUKA KR Agilus)
environment to Java (KUKA LBR iiwa) environment.
To support engineers in doing these cost-intensive
tasks, this position paper focuses on the verification
and validation activity of engineers to ensure similar
system behavior for both robot types, i.e., whether or
not the original software control code in KRL behaves
similarly to Java implementation.
5 SOLUTION APPROACH
This section explains our solution approach for a
human-based maintenance process in a PSE environ-
ment that is based on an abstract model of the control
logic source code.
In the Maintenance & Operation phase of an
PSEs, engineers, among other activities, need to re-
new and modernize engineering units (L
¨
uder et al.,
2017) such as robot arms, which also means that the
type of the unit can change. In this case, a challenge
during the maintenance phase is to verify that the
functional behavior of the unit to be replaced equals
that of the newly installed unit. We, therefore, pro-
pose a structured maintenance process that enables a
model-based validation and verification of the control
code that replaces the old control code.
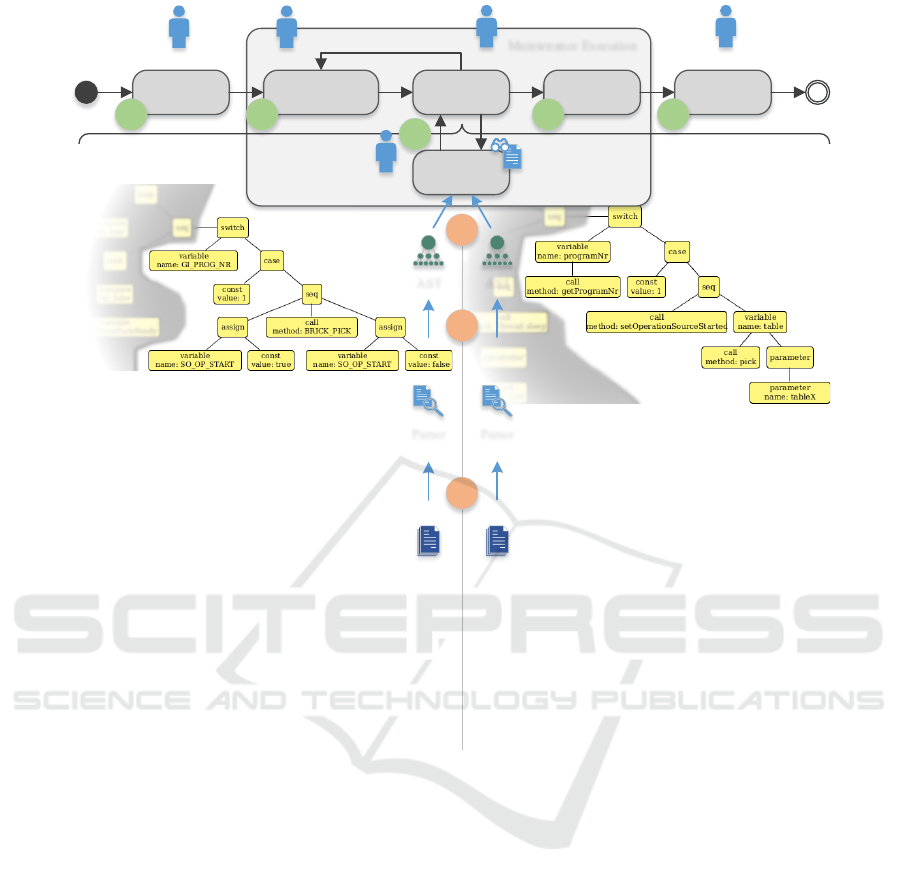
Fig. 3 shows an overview and the main parts of our
solution approach and is divided into two sections.
The upper part of the figure explains our proposal for
a human-centered maintenance process for PSE in-
cluding the relevant activities, labeled in green from
A to E, that have to be executed by different stake-
holders. The lower part of the figure shows, labeled
in orange from 1 to 3, the steps that we implemented
to derive an AST model, which can be used for val-
idation and verification, from snippets of the control
logic source code of the two robot arms introduced in
Section 4 and their ASTs which are used in the main-
tenance process.
In (L
¨
uder et al., 2017) the authors sketched some
general activities and corresponding artifacts that are
relevant during the Maintenance phase of a produc-
tion system, however, a process for maintenance ac-
tivities is only scarcely described. To address this is-
sue, we developed a structured process for the main-
tenance of software and control code in the PSE do-
main, which is based on a general software mainte-
nance process (Yau et al., 1988) and a process for
testing software (ISO 29119, 2013). The process is
shown as activity diagram in the upper part of Fig. 3
and described in the following.
• First, the process is started with a Maintenance
Planning activity, labeled with A in the figure,
where a Planner defines the objectives of the
phase and identifies necessary tasks to be done.
This can be, for example, the modernization of
a worn off robot arm that also requires a re-
scheduling of the production plan due to tem-
porarily missing resources. The next three activi-
ties (B to D) are part of a subprocess called Main-
tenance Execution.
• Second, the tasks identified in the planning activ-
ity need to be prepared and executed in the Main-
tenance Implementation activity (B) by Develop-
ers of different domains. This phase includes, for
example, the implementation of the robot behav-
ior for the new robot type.
• The third phase (C) is divided into two tasks. On
the one hand, the Validation & Verification task, is
executed by a Quality Assurance Engineer, which
aims at checking the validity and quality of the
implementation. On the other hand, this phase
contains, in our case, a Human Inspection of the
AST model to check the correctness of the behav-
ior. If this Human Inspection fails, it is fed back
to the Validation & Verification task which reports
the issue back to the developers and starts a new
Maintenance Implementation cycle.
• In the Deployment activity (D), after the Valida-
tion & Verification task was completed success-
fully, the code artifacts are deployed to the con-
trol nodes, and the replacement units are installed
in the production system.
• The final activity (E) of our Maintenance Process
is the Operation task that includes the startup of
the production system with the new configuration
and checks whether everything works as expected
after maintenance and is executed by the Opera-
tions team.
To support the Validation & Verification, the task
of the Maintenance Process we chose a model-based
approach that exploits the AST of the implemented
control codes. The goal was to leave out irrelevant
parts of the control code and concentrate on the struc-
tural parts that represent the behavior of the programs.
This abstract representation of code as models should
enable engineers, without the specific knowledge of
the particular programming languages, to easier in-
spect whether the behavior of the programs is sim-
ilar. For our approach, we decided to utilize the
language-independent ASTM (OMG, 2011) provided
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
406
ParserParser
Maintenance
Planning
Maintenance
Implementation
Deployment Operation
Validation &
Verification
Maintenance Execution
...
LOOP
WAIT FOR InputDataReady
SWITCH GI_PROG_NR
CASE 1
SO_SOURCE_OP_START = TRUE
BRICK_PICK()
SO_SOURCE_OP_START = FALSE
CASE 2
SO_TARGET_OP_START = TRUE
BRICK_PLACE()
SO_TARGET_OP_START = FALSE
...
DEFAULT
ENDSWITCH
ENDLOOP
...
...
while(read) {
while(!getDataReady()) {
Thread.sleep(100);
}
switch (getProgramNumber()) {
case 1:
setOperationSourceStarted();
table.pick(tX, tY, tZ, tA);
unsetOperationSourceStarted();
break;
case 2:
setOperationTargetStarted();
shutle.place(sX, sY, sZ, sA);
unsetOperationTargetStarted();
break;
...
default: break;
}
}
...
ASTAST
ParserParser
ASTAST
Human
Inspection
Source
Code
Source
Code
A B
C
D E
3
2
1
Planner Dev
QA Ops
QA
Figure 3: Maintenance process for PSE and creation of AST model from robot control code.
by the OMG. This model establishes a Generic Ab-
stract Syntax Tree that provides common concepts for
modeling programming languages. Furthermore, it
introduces a Specific Abstract Syntax Tree (SAST) for
particular languages. However, to this point in time,
the SAST needs to be implemented individually or at
least a mapping needs to be provided for a particular
programming language. This model allows a flexible
creation of models from source code and addition-
ally includes an EMF description that easily allows
using the model in software applications. To create
the model-based AST visualizations of control codes
the following steps are necessary.
• In a first step, labeled 1 in Fig. 3, the Source Code
is parsed by a Parser specific to the particular pro-
gramming language of the control code. For this
step either a parser exists, or it has to be created
with the help of a parser framework.
• The second step, labeled 2, translates resp. maps
the internal model of the parser to the common
AST model, which is in our case the ASTM.
• The last step, labeled 3, includes the visualization
of the language-independent ASTM in a proper
format, like GraphML, and the provision to the
Quality Assurance team that executes the Human
Inspection.
6 EVALUATION
To show the feasibility and evaluate our approach we
selected a prototypical case for the exchange of the
two robot arms introduced in Section 4 during a pro-
duction system maintenance phase.
We, therefore, first parsed the control code for
each of the robot arms, that is shown at the bottom
of Fig. 3. While the code on the left hand is a snippet
of the KUKA KR Agilus robot, which is programmed
Towards Model-driven Verification of Robot Control Code using Abstract Syntax Trees in Production Systems Engineering
407

using the KRL language, the snippet on the right hand
is a similar part of the KUKA LBR iiwa robot code,
which is implemented in Java. The parsing mod-
els can then mapped to a Java implementation of the
ASTM, which we created from the provided EMF de-
scription with the help of the Eclipse IDE. Using the
ASTM allowed us not only to run several checks on
the model to compare the ASTs, but also to visualize
the models with the same methods and frameworks.
The visualization of the ASTs displayed in Fig. 3 at
the label 2 was done using GraphML and the freely
available editor yEd
7
. We were then able to visually
compare the ASTs of the two robot control codes that
were implemented in the two different programming
languages.
Table 1: Identifying strengths and weaknesses of differ-
ent approaches. ++ = high, - - = low, × = not supported,
= supported, Code = Effort for Code Implementation,
V & V = Validation and Validation, AST = Abstract Syntax
Tree.
As Is
AST
Based
AST Tool
Supported
Effort
Code ++ ++ ++
V & V ++ + -
Engineering
Knowledge
Code ++ - - -
V & V ++ - - -
Separation
of Roles
Code ×
V & V ×
After the implementation, we compared the tradi-
tional approach of comparing the control code with
our AST-based approach. The results of our findings
are summarized in Table 1 and act as a basis for a
conceptual evaluation that also includes a future ver-
sion of our approach that includes tool support for
the comparison. The table groups the traditional ap-
proach As Is, our AST-based approach and our AST-
based with improved tool support, as well as the three
categories (a) Effort that is invested for writing as well
as validating and verifying the control code, (b) En-
gineering Knowledge, which is needed for the com-
parison of the code and the validation and verifica-
tion, and (c) Separation of Roles, which means how
well the different identified roles involved are sepa-
rated during the maintenance process.
The Effort to write the control code for the robot
arms remains high, resp. does not change, for all
three approaches. However, the Effort to validate and
verify the control code is slightly better in our ap-
proach than in the actual approach of code compar-
ison. We expect the Effort to be even lower when
7
yEd Graph Editor: www.yworks.com/products/yed
the AST-based approach is supported by tools. The
Engineering Knowledge in the actual approach needs
to be high to compare the old with the new behavior
of the robot arm. Using our approach the details of
the programming languages are omitted which sim-
plifies the comparison and lowers the effort. Once
again, with proper tool support, we expect the effort
to be even lower. The Separation of Roles is given
in our AST-based and the tool-supported AST-based
approach, however, in the current approach the devel-
oper of the code and the quality assurance engineer
are strongly intertwined.
7 DISCUSSION AND
CONCLUSION
This section discusses the findings of the solution ap-
proach and the evaluation in the context of the re-
search questions and presents the limitations. The
main goal of this position paper is to support engi-
neers in the verification and validation process within
a maintenance process of a PSE project.
With the focus on RQ.1, we explained that al-
though robots are constructed as universal and flex-
ible devices, changing from one type to another can
mean to re-program the entire control code of the
robot. Therefore, a maintenance process in the PSE
domain have to include software code construction
and verification and validation. The adapted main-
tenance process builds on a AST approach to com-
pare different abstract representations of the related
software control code. The verification and validation
of software control code for different programming
languages can significantly reduce time and costs for
testing and commissioning of the new robot.
Addressing the research question RQ.2, we found
out that an AST is a suitable formalism for verification
and maintenance process. However, it is not enough
to compare the corresponding ASTs structurally (i.e.,
from the syntax point of view). To conduct a robust
comparison, the corresponding ASTs have to be rather
analyzed and compared in a complex way including
knowledge about the semantics of the languages be-
hind. This fact poses a main limitation of the pro-
posed method. Furthermore, more complex software
control code will result in more complex AST mod-
els which could hardly be handled by humans, also
because of the possibility of a differing structure of
the models. Therefore, tool support is needed to sup-
port human inspection in the verification and valida-
tion task.
Limitations of the approach includes semantic
meaning of AST models, derived from software con-
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
408

trol code and the complexity of result AST represen-
tations which require tool support for searching, fil-
tering, and similarity detection. Further limitations
focus on the evaluation where we present some pre-
liminary investigations on in a small use case by using
small code snippets. In the context of this position pa-
per, the further investigation remains for future work.
Therefore, as future work, we plan to investigate
in more detail the benefits and limitations of the pro-
posed approach, including automated tool support.
Furthermore, we plan to address such a semantic com-
parison of corresponding ASTs. Finally, we will focus
on considering languages of other robot vendors such
as ABB or FANUC.
ACKNOWLEDGEMENTS
The financial support by the Christian Doppler Re-
search Association, the Austrian Federal Ministry for
Digital and Economic Affairs and the National Foun-
dation for Research, Technology and Development is
gratefully acknowledged. The research done by Petr
Nov
´
ak has been supported by the DAMiAS project
funded by the Technology Agency of the Czech Re-
public.
REFERENCES
Atzeni, M. and Atzori, M. (2017). Codeontology: Rdf-
ization of source code. In International Semantic Web
Conference, pages 20–28. Springer.
Aurum, A., Petersson, H., and Wohlin, C. (2002). State-of-
the-art: software inspections after 25 years. Software
Testing, Verification and Reliability, 12(3):133–154.
Biffl, S., L
¨
uder, A., and Winkler, D. (2016). Multi-
Disciplinary Engineering for Industrie 4.0: Semantic
Challenges and Needs, pages 17–51.
Brandes, U., Eiglsperger, M., Herman, I., Himsolt, M.,
and Marshall, M. S. (2001). Graphml progress report
structural layer proposal. In International Symposium
on Graph Drawing, pages 501–512. Springer.
Chan, K. and Spedding, T. (2003). An integrated mul-
tidimensional process improvement methodology for
manufacturing systems. Computers & Industrial En-
gineering, 44(4):673 – 693.
Collins, K. (2007). PLC programming for industrial au-
tomation. Exposure.
Drath, R., Luder, A., Peschke, J., and Hundt, L. (2008).
Automationml-the glue for seamless automation engi-
neering. In ETFA 2008., pages 616–623. IEEE.
Grimmer, A., Angerer, F., Prahofer, H., and Grun-
bacher, P. (2016). Supporting program analysis for
non-mainstream languages: Experiences and lessons
learned. In 2016 IEEE 23rd Int. Conf. on Software
Analysis, Evolution, and Reengineering (SANER),
pages 460–469. IEEE.
ISO 29119 (2013). INTERNATIONAL STANDARD ISO
/ IEC / IEEE Software and systems engineering —
Software testing — Part 2: Test processes.
Jones, J. (2003). Abstract syntax tree implementation id-
ioms. In Proceedings of the 10th conference on pat-
tern languages of programs (plop2003), pages 1–10.
Kim, B. C., Teijgeler, H., Munc, D., and Han, S. (2011). In-
tegration of distributed plant lifecycle data using ISO
15926 and Web services. Annals of Nuclear Energy,
38:2309–2318.
L
¨
uder, A., Schmidt, N., Hell, K., R
¨
opke, H., and Zawisza, J.
(2017). Identification of Artifacts in Life Cycle Phases
of CPPS, pages 139–167. Springer International Pub-
lishing, Cham.
Moser, T., Mordinyi, R., and Winkler, D. (2012). Ex-
tending mechatronic objects for automation systems
engineering in heterogeneous engineering environ-
ments. In Emerging Technologies & Factory Automa-
tion (ETFA), 2012 IEEE 17th Conf. on, pages 1–8.
IEEE.
OMG (2011). Architecture-driven Modernization : Ab-
stract Syntax Tree Metamodel. [Online; 2018-11-12].
Parr, T. J. and Quong, R. W. (1995). Antlr: A predicated-ll
(k) parser generator. Software: Practice and Experi-
ence, 25(7):789–810.
Schafer, W. and Wehrheim, H. (2007). The challenges of
building advanced mechatronic systems. In Future of
Software Engineering (FOSE ’07), pages 72–84.
Steinberg, D., Budinsky, F., Merks, E., and Paternostro, M.
(2008). EMF: eclipse modeling framework. Pearson.
Unver, H. O. (2012). An isa-95-based manufacturing intel-
ligence system in support of lean initiatives. The In-
ternational Journal of Advanced Manufacturing Tech-
nology, pages 1–14.
Wasson, C. S. (2015). System engineering analysis, design,
and development: Concepts, principles, and prac-
tices. John Wiley & Sons.
Winkler, D., Sabou, M., and Biffl, S. (2017). Improving
quality assurance in multidisciplinary engineering en-
vironments with semantic technologies. In Kounis,
L. D., editor, Quality Control and Assurance, chap-
ter 8. IntechOpen, Rijeka.
Yau, S. S., Nicholl, R. A., Tsai, J.-P., and Liu, S.-S. (1988).
An integrated life-cycle model for software mainte-
nance. IEEE Transactions on Software Engineering,
14(8):1128–1144.
Towards Model-driven Verification of Robot Control Code using Abstract Syntax Trees in Production Systems Engineering
409
