
Real Time Eye Gaze Tracking System using CNN-based Facial Features
for Human Attention Measurement
Oliver Lorenz and Ulrike Thomas
Professorship of Robotics and Human-Machine-Interaction,
Chemnitz University of Technology, Reichenhainer Str. 70, Chemnitz, Germany
Keywords:
Eye Gaze Tracking, Human-robot Interaction, Facial Features, Head Pose, Face Detection, Human Attention.
Abstract:
Understanding human attentions in various interactive scenarios is an important task for human-robot collabo-
ration. Human communication with robots includes intuitive nonverbal behaviour body postures and gestures.
Multiple communication channels can be used to obtain a understandable interaction between humans and
robots. Usually, humans communicate in the direction of eye gaze and head orientation. In this paper, a new
tracking system based on two cascaded CNNs is presented for eye gaze and head orientation tracking and ena-
bles robots to measure the willingness of humans to interact via eye contacts and eye gaze orientations. Based
on the two consecutively cascaded CNNs, facial features are recognised, at first in the face and then in the
regions of eyes. These features are detected by a geometrical method and deliver the orientation of the head
to determine eye gaze direction. Our method allows to distinguish between front faces and side faces. With a
consecutive approach for each condition, the eye gaze is also detected under extreme situations. The applied
CNNs have been trained by many different datasets and annotations, thereby the reliability and accuracy of
the here introduced tracking system is improved and outperforms previous detection algorithm. Our system is
applied on commonly used RGB-D images and implemented on a GPU to achieve real time performance. The
evaluation shows that our approach operates accurately in challenging dynamic environments.
1 INTRODUCTION
Analyses of human eye gazes are important for recog-
nizing attentions in various applications. Eye motions
and eye directions indicate human attentions to com-
municate to each other and can thus be used to study
their willingness to interact and their intentions. Ba-
sed on these knowledge, accurate and robust detection
of eye gazes are essential components in active rese-
arch topics, while used among many other indicators
for action recognition (Liu et al., 2017) and saliency
detection (Parks et al., 2015). Besides hand gestu-
res and body postures, facial features are considered
as the most important interactive features to under-
stand a human desire, needs and cognitive processes
(Palermo and Rhodes, 2007). In order to enable inte-
ractive communication between humans and robots,
eye gazes are used, which clearly describe human be-
haviour to communicate. Looking on eye gazes, it
offers other humans a stimulus to direct their attenti-
ons immediately to their counterparts. Human actions
are always performed in the direction of eyes in or-
der to maintain control and the ability to react. Face
detection tasks are affected strongly by various hu-
man characteristics and images based on strong as-
sumptions. Rowley et al. (Rowley et al., 1998) des-
cribe a neural network trained by arbitration on mul-
tiple networks to improve performance over a single
network. In (Yang et al., 2015) a deep CNN-based
(DCNN) face detector detects faces from a new per-
spective view through scoring facial parts responses
by spatial structures and arrangements. Fischer et. al.
(Fischer et al., 2018) generate own datasets with an-
notations based on an external unit of measurement
in order to obtain eye gazes and head poses. A cas-
cading CNN (Li and Fu, 2018), which operates on
multiple resolutions, quickly rejects the background
regions in the fast low-resolution step. Cascaded
shape regression models (Doll
´
ar et al., 2010) apply re-
gression to establish the relation between appearance
to shape by directly learning the mapping function.
Deep learning combined with shape regression can
improve the accuracy of localisation of facial featu-
res. DCNNs can be classified within the large fra-
mework of cascaded shape regression models. Multi
task-oriented CNNs establish the inherent correlation
between these two tasks. Eye gaze tracking is defined
as tracking the eye movements, e.g. the directions of
598
Lorenz, O. and Thomas, U.
Real Time Eye Gaze Tracking System using CNN-based Facial Features for Human Attention Measurement.
DOI: 10.5220/0007565305980606
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 598-606
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

eye gazes and their gradient over time. Special geo-
metric relationships of the features (Zhao et al., 2018)
reduce the complexity for calibration and image pro-
cessing time. Chinsatit and Saitoh (Chinsatit and Sai-
toh, 2017) suggest two CNNs as feature points to re-
cognise the pupil centres. The first CNN is used to
classify the eye state and the second CNN estimates
the position of the pupil centres. The authors (Muk-
herjee and Robertson, 2015) use low-resolution multi
modal RGB-D images and regression based on lear-
ned depth classifiers. They combine the two models
to approximate regression confidences. In (George
and Routray, 2016), a CNN is used to classify the eye
gaze and to estimate eye-accessing cues in real time.
Lemley et. al. (Lemley et al., 2018) evaluate different
datasets for designing a CNN with minimal compu-
tational requirements for gaze estimation. Recently,
Deng and Zhu (Deng and Zhu, 2017) suggest a new
two-step training policy, where a CNN for head re-
cognition and a CNN for eye recognition are trained
separately and then jointly fine-tuned with a geometri-
cally constrained gaze transform layer. In general, the
robustness and reliability of current approaches for
eye gaze tracking have been improved. However, the
accuracy and repeatability of current detection met-
hods are not sufficient. In order to predict human in-
tentions in different situations and in realistic work
environments, a new tracking system based on casca-
ded CNNs for extreme conditions and face alignments
is proposed. It is able to recognise the willingness of
interaction and measures the attention of humans be-
cause of eye gazes and head orientations. It applies in
the first recognised 2D facial feature and maps it into
3D, then a further CNN is applied to track the head
orientation. These models allow real time tracking of
eye gaze independently from orientation of the head.
Due to the facial features and applied facial symme-
tries, the eye gaze recognition is robust towards face
and image-based occlusions. As a result, the eye gaze
direction should be considered as a key indicator for
the ability to interact.
2 PROPOSED METHOD
Figure 1 shows the proposed tracking pipeline for
eye gazes. A RGB-D image is obtained from a
low-cost RGB-D sensor and transferred to the Multi-
Task CNN (MTCNN). The MTCNN detects face re-
gions and locates the facial landmarks of an indivi-
dual face. The eye regions are separated and the head
pose is computed. If the yaw angle of the head is
beyond a certain threshold τ, the eye region is repla-
ced with the tracking result from the MTCNN. Alter-
natively, the eye region is taken as the initialisation in-
put for the Kernelized Correlation Filter (KCF). Furt-
hermore, the two eye regions are taken as input for
another CNN. The model of the second CNN expli-
citly encodes coordinates in the CNN-layers and cal-
culates the coordinates of eye corners. Finally, the eye
gaze of each individual eye is computed by the usage
of different facial features.
2.1 Face Detection
By various human characteristics and different trai-
ning datasets, we recognise all human faces in the
field of view (FOV) and then determine the face alig-
nment for each face. We introduce a cascaded struc-
ture to establish our detection from coarse to fine,
see Figure 1. The cascaded network contains three
sub networks: a Proposal Network (P-Net), a Refi-
nement Network (R-Net) and an Output Network (O-
Net). The P-Net is used to generate bounding boxes
around detected faces. The trained P-Net only out-
puts N bounding boxes with four coordinates and their
quality scores. The R-Net is used to remove a large
number of regions where no faces are detected. The
input of the R-Net is the resulted bounding box of the
former P-Net, with the size of 24 × 24 pixels. The
O-Net is similar to the R-Net by one exception that
this the O-Net with the size of 48 × 48 pixels inclu-
des the task for landmark regression. The final out-
put includes four (x, y)-coordinates for the bounding
box, designed by scores, that are in particular the
(x, y)-coordinate of left top point, height and width
of the bounding box, and can be described by a vector
y
box
i
∈ R
4
. The values ˆy
lm
i
are the facial coordinates
and the values are y
lm
i
the Ground Truth coordinates.
Altogether, there are five facial landmarks as a vector
y
lm
i
∈ R
5
, including rough centre of left and right eye,
nose tip, left mouth corner and right mouth corner.
The loss function of the face classification branch is
given by L
det
i
(1), which adopts the cross entropy
L
det
i
= −(y
det
i
log(p
i
) + (1 −y
det
i
)(1 − log(p
i
))), (1)
where p
i
is the probability produced by the network
that indicates a sample being a face. The y
det
i
∈
{0, 1} denotes the Ground Truth label. The second
loss function is for bounding box regression L
box
i
=||
ˆy
box
i
− y
box
i
||
2
and the third is for facial landmark re-
gression. The difference L
lm
i
=|| ˆy
lm
i
− y
lm
i
||
2
is the
euclidean distance loss. The ˆy
box
i
describes the re-
gression target and y
box
i
represents the Ground Truth
coordinates. We trained the MTCNN with several dif-
ferent datasets (Sun et al., 2013; Yang et al., 2016),
which contain front view images and side view ima-
ges. Moreover, we annotated these datasets to im-
Real Time Eye Gaze Tracking System using CNN-based Facial Features for Human Attention Measurement
599
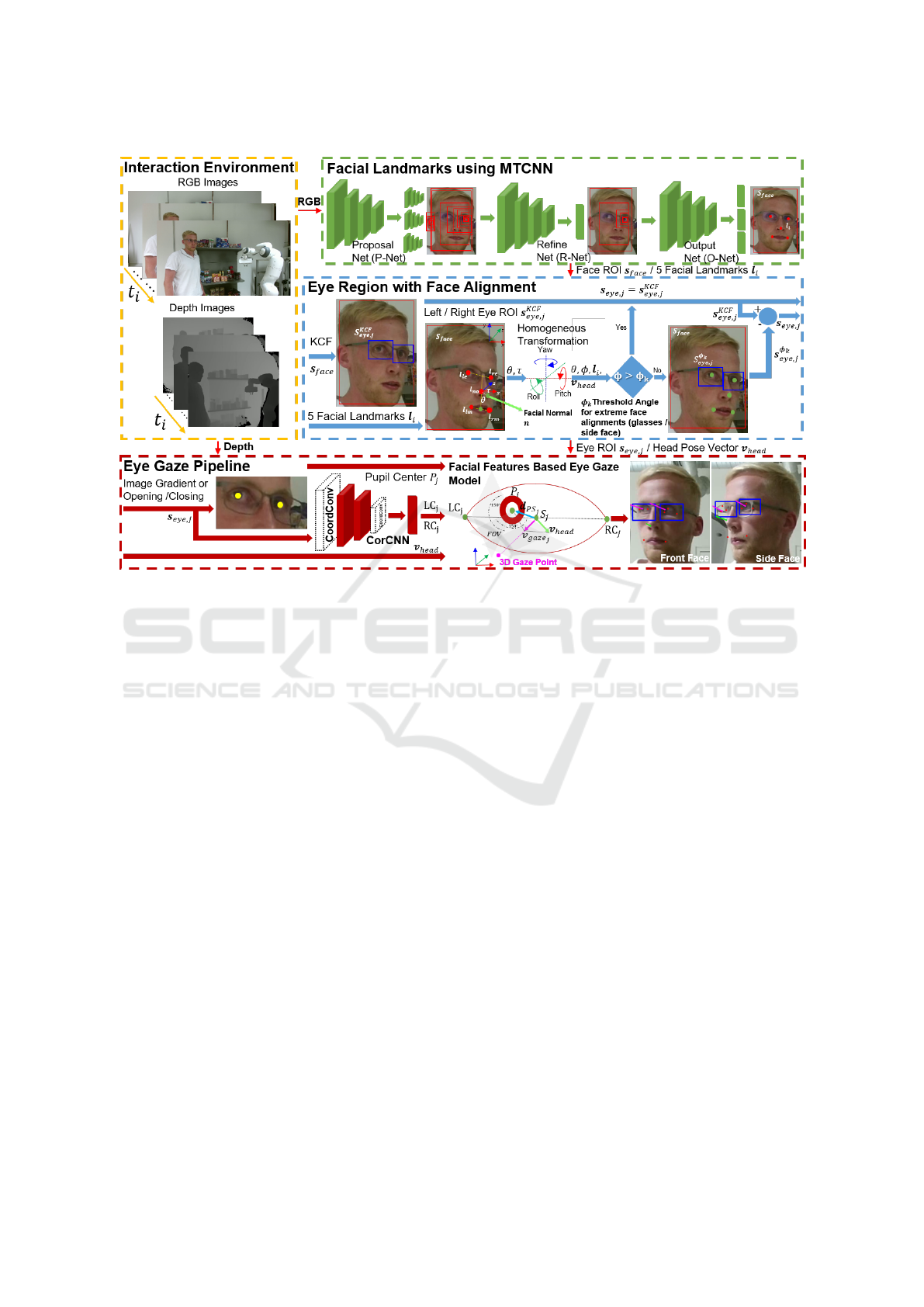
Figure 1: Proposed pipeline of CNN-based facial features and tracking of eye gazes.
prove the accuracy and robustness against the appro-
ach from (Zhang et al., 2016). Zhang et. al. only use
datasets with front view images. For eliminating the
background we compute the loss function L
det
i
. The
Equation (2) is defined to control the calculation of
different losses for various inputs.
min
N
∑
i=1
∑
j∈{det,box,lm}
α
j
β
j
i
L
j
i
(2)
where N is the number of training samples. j ∈
{det, box, lm} and α
j
denotes the task importance. In
the case of P-Net and R-Net, the weights for the key
points regression are less than those for the O-Net
part due to the focus of the first two stages on filte-
ring out the bounding boxes of which are no faces.
β
j
i
∈ {0, 1} is a sample type indicator and L
j
i
denotes
the respective loss function for three different tasks.
As the information provided in the various datasets
can be assumed as known, the number of images con-
tained in the original training set is very small, which
is not enough to train MTCNN. Therefore, we incre-
ase the number of input images by augmenting trai-
ning dataset with annotated information. Our appro-
ach includes a) random rotations to deal with face ro-
tations, b) random increase and decrease of intensity
values to deal with different lighting conditions and
c) addition of Gaussian noise to enhance generalisa-
tion performances. We select the 70 % largest loss
samples in each mini batch as hard samples and we
only use this part to calculate the gradient in the back
propagation. Some simple samples, which have little
effect on the enhanced classifications, are discarded.
Finally, it turned out that our training with stochastic
gradient descent, an initial learning rate of 0.01 with
decay is assumed.
2.2 Head Orientation
Based on the five facial landmarks l
l
l
i
the key features
are determined and with the symmetry assumption of
the face, we compute the orientation of the head. In
(Gee and Cipolla, 1994) are taken four key features to
calculate the head orientation and determine the cen-
tre of the mouth by linearly extending the tip of the
nose downwards. We use an improved and more accu-
rate approach with more CNN-based facial features as
well as the calculation of the pupil centre. In addition,
we estimate the symmetry centre of the mouth and the
length of the mouth L
m
based on the left and right cor-
ner of the mouth. The facial symmetry axis is found
by connecting a line between the eye midpoint and
the mouth midpoint. Assuming a fixed ratio between
these facial features and fixed distance ratios between
eye to mouth, nose to mouth, nose base to nose tip as
well as the length of the mouth. The facial direction
can be determined under weak perspective geometry
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
600
from the 3D angle of the nose. The l
l
l
i
are used to de-
termine the head pose from the normal by the vector
d
d
d to the image plane, which can be found from pla-
nar skew symmetry and a coarse estimate of the nose
tip. The angle σ is formed by the face normal
ˆ
n
n
n and
the normal vector d
d
d of the image plane. Using the
length between eyes to mouth centre L
e
and nose tip
to mouth centre L
b
, the position of the nose base l
no
can be found along the symmetry axis following the
image of the facial normal and producing an immedi-
ate estimate of the tilt τ. Our Algorithm 1 calculates
Algorithm 1: Tracking for face alignment.
Data: Face ROI s
s
s
face
, 5 facial landmarks
l
l
l
i
= (x
i
, y
i
) where i ∈ {le, re, lm, rm, no}
Result: Aligned eye regions s
s
s
0
eye, j
,where j ∈ {l, r}
1 Initialize KCF using dot product kernel;
2 Compute head orientation (θ, φ) based on
ˆ
n
n
n = [sinσ cos τ, sin σ sin τ, − cos σ] with
σ = cos
−1
|
ˆ
d
d
d
z
| and angle τ;
3 if φ > yaw threshold φ
k
then
4 Result as s
s
s
0
eye, j
;
5 else
6 if τ > 5 then
7 Rotate transformation with rotation angle
-τ and rotation centre l
l
l
lm
on s
s
s
f ace
and
landmarks l
l
l
i
;
8 Aligned face ROI s
s
s
0
f ace
and transformed
landmarks l
l
l
0
i
;
9 Crop 2 eye ROIs s
s
s
0
eye, j
in s
s
s
f ace
;
10 Location of s
s
s
eye, j
to initialize the KCF
using
ˆ
f (z
z
z) =
ˆ
k
k
k
xz
ˆ
y
y
y
?
ˆ
k
k
k
xx
+λ
;
11 Result as s
s
s
0
eye, j
;
12 end
13 end
the head orientation resulting in a pitch angle ψ and
yaw angle φ obtained from the angles θ and τ. Since
the roll angle θ describes the alignment of a human
faces, the process of feeding the aligned human eye
regions can improve the robustness. For computing
a roll angle θ, we use the two mouth corners and the
mouth length to determine the angle θ relative to the
x-axis. Then we select the left mouth corner as the
centre of rotation to carry out the rotation transforma-
tion of −θ. This step can eliminate the influence of
the roll angle. Through the yaw angle φ, we determine
lateral head rotation which has an influence on the de-
tection of the face. If the yaw angle φ is too large due
to the head orientation, the key features can no longer
be detected exactly, because the MTCNN was only
trained with front view images and a few multi view
images. It is well known that when the face is tilted
at a larger angle, the other eye is not visible in the
camera-centred image, and the eye gaze tracking de-
pends on the eye region that is visible. Afterwards,
the eye corners and pupil centres can be extracted in
the aligned face images and then they are reversed to
obtain their true coordinates in the origin image. For
tracking the eye region under large yaw angle φ, we
set a threshold angle φ
k
for the yaw angles. The thres-
hold angle φ
k
is statistically determined by the usage
of training data. If the yaw angle φ is greater than the
threshold angle φ
k
, we will start to use the tracking
results of KCF instead of these cropped eye regions.
The KCF constructs the training sample of classifier
through loop shifting, which turns the data matrix into
a circular matrix. Based on the properties of circular
matrix, the solution of the problem is transformed to
the frequency domain, which avoids the process of
matrix inversion and greatly reduces the complexity.
2.3 Eye Features and Eye Gaze
CNN models have some excellent properties, such as
weight sharing and local connections. However, in
the task involving coordinate modelling, its advanta-
ges become eliminated and potentially affect the mo-
del performance. The nature of the problem lies on
the invariant translation of convolution. Accordingly,
we proposed the corresponding ”CoordConv-layer”.
”CoordConv-layer” solves the problem of coordinate
transformation and it has an improved generalisation
ability. The ”CoordConv-layer” allows the convolu-
tion filter to observe the coordinates that will break
invariant transformations and learn a function for the
translation of invariants. If weights converge toward
zero, the layer behaves exactly like the standard con-
volution. If weights are nonzero, the function will
contain some degree of translation of dependence.
The precise form of which will ideally depend on the
task being solved. The ”CoordConv-layer” accom-
plishes a mapping by first concatenating extra chan-
nels to the incoming representation. It allows the
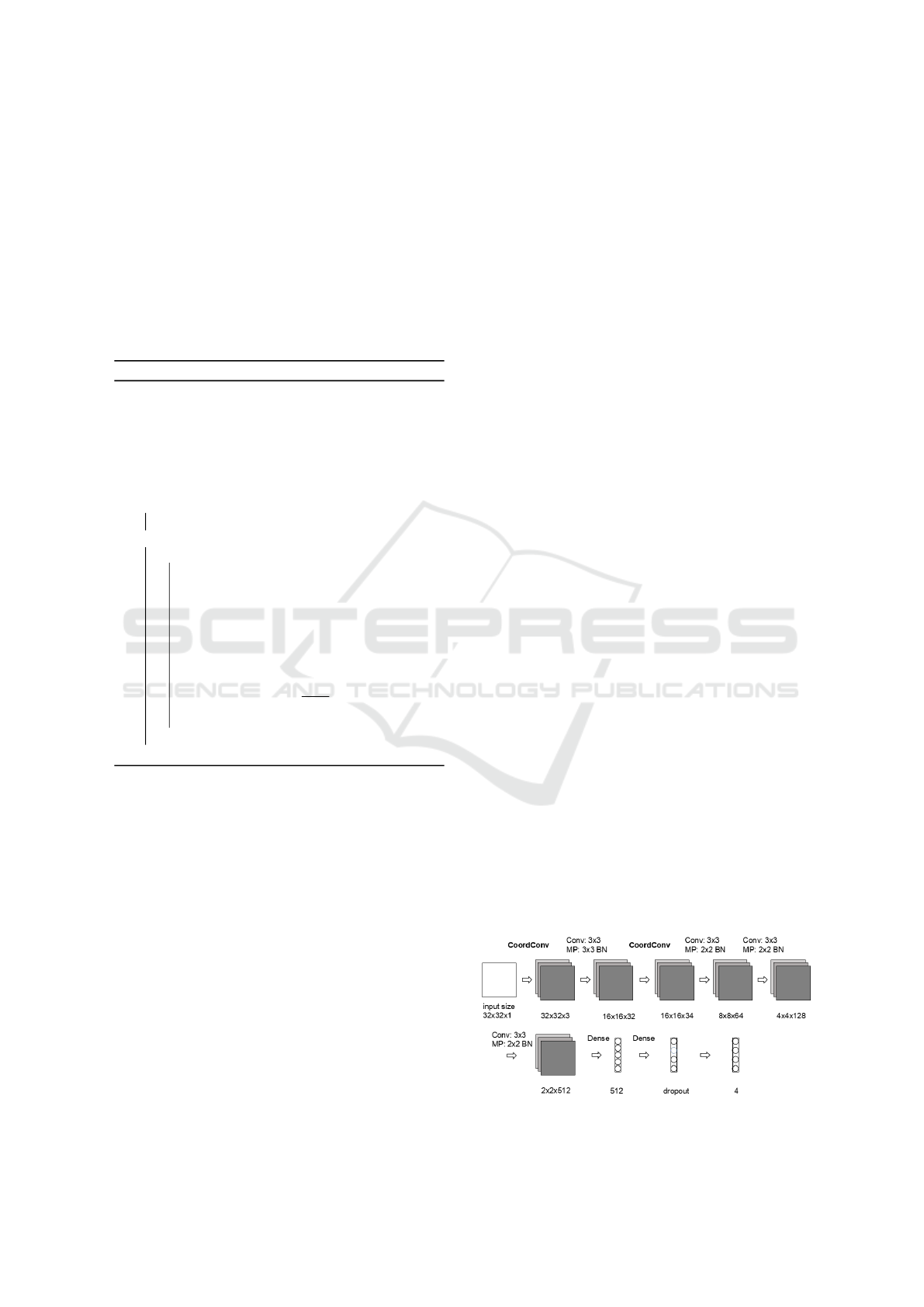
Corner CNN (CorCNN) as a single stage CNN to le-
arn to keep or to discard the third translation of in-
variance as is needed for the task being learned, see
in Figure 2. For the training datasets, we selected
Figure 2: Model of our CorCNN.
Real Time Eye Gaze Tracking System using CNN-based Facial Features for Human Attention Measurement
601

the Kaggle Facial Landmarks Dataset
1
and also ex-
tended the training data. We use the loss function
of landmark regression to control the training pro-
cess of our CorCNN. The loss function, based on
Mean Squared Error (MSE), is a L2 regularisation
with factor 0.0001 and a simple L2 distance between
the respective predicted output and (x, y)-coordinates
of Ground Truth landmarks. Our CorCNN computes
the loss between actual targets and predicted targets
and learns the weights by reducing this loss. The re-
gression loss does not change after 10000 iterations
and the minimum of the regression loss is 0.0136 by
a learning rate of 0.01. From there, the regression loss
converge towards zero. We apply a feature-based ap-
proach by using combined image gradients and mor-
phological operations for the localisation of pupil cen-
tre P. In order to directly track the eye movements
and to calculate the eye gaze vector, we propose a fa-
cial features method based on the pupil centre P, eye
corners LC
j
and RC
j
and the particular head orienta-
tions v
v
v
head
, which allows image-based estimation of
eye gaze directions. Humans have the intuition to use
the pupil centre positions in relation to the corners of
eyes to determine the direction of eye gazes. Eye regi-
ons can be considered as two small rectangles located
in the face plane. When the position of the corners of
both eyes, LC
j
and RC
j
, are determined, we can de-
fine the centre points of the eyes S
j
. The vertical field
of view of the eyes is about 150°. The distance bet-
ween the centre of the pupils P
j
and the centre of the
eyes S
j
is determined by adding the calculated vec-
tor of the head pose v
v
v
head
on the shift vector d
d
d
PS
with
two scaling factors k
gaze
and k
head
. The result is the
respective gaze direction of both eyes. The algorithm
corrects this result based on the head pose. One eye
far away from the camera may not appear in the image
when the head is moved relatively to the camera, thus
we add a weight w
pose
to determine the importance
of head poses in the direction of gaze, which points
away from the camera as described in Algorithm 2.
3 EXPERIMENTS AND RESULTS
All components are considered separately or indepen-
dently of each other and then statistically evaluated on
the basis of various image datasets and compared to
the current state of art. Experiments are conducted in
dynamic environments in real time and for side faces.
It allows different interaction scenarios to be simula-
ted and adjusted. The goal is to evaluate the reliabi-
lity and accuracy of the whole tracking system and all
1
https://www.kaggle.com/c/facial-keypoints-detection
associated components. Therefore, we neglect extre-
mely side faces with an occlusion of more than a half
of the face. The error function is given by the absolute
mean error (AME):
AME =
1
N
N
∑
i=0
| g − ˆg | (3)
where g denotes the facial feature values and ˆg the
Ground Truth values.
Algorithm 2: Eye gaze vector estimation.
Data: Eye corners LC
j
and RC
j
, pupil centre P
j
for j ∈ {l, r}, where denotes left l and right
left r eye, head pose vector v
v
v
head
, scaling
factors for local eye gaze and head pose
direction k
gaze
, k
head
Result: Eye gaze vector v
v
v
gaze, j
1 w
pose
according to v
v
v
head
[0];
2 for j ∈ {l, r} do
3 Results as S
j
of LC
j
and RC
j
; d
d
d
PS, j
;
4 v
v
v
gaze, j
= k
gaze
d
d
d
PS, j
+ k
head
v
v
v
head
;
5 end
6 if v
v
v
head
[0] > 0 then
7 v
v
v
gaze,right
←
(1 − w
pose
)v
v
v
gaze,right
+ w
pose
v
v
v
gaze,right
;
8 else
9 v
v
v
gaze,left
←
(1 − w
pose
)v
v
v
gaze,left
+ w
pose
v
v
v
gaze,left
;
10 end
3.1 Facial Features Detection
The evaluation of facial features detection is based on
the HELEN dataset (Le et al., 2012) and is compa-
red to the Dlib-ml method (E. King, 2009). The HE-
LEN dataset provides a large collection of annotated
facial images, exhibiting a large variety in appearance
as well as general images and environmental condi-
tions. The facial landmark detector proposed inside
Dlib-ml produces 68 coordinates of facial landmarks
that map to specific facial structures. Through the an-
notations and Ground Truth data, both algorithms can
be compared directly. We calculate the AME for the
Ground Truth data of all previously detected facial fe-
atures. Our first CNN (Multi-Data MTCNN) does not
achieve the detection accuracy of the Dlib-ml. For all
extracted facial key features the AME is smaller as
shown in Figure 3. The largest deviation can be seen
at the corners of the mouth. Due to the inaccurate re-
cognition of our Multi-Data MTCNN, we refined and
improved the inaccurate output by a second CorCNN
in which is especially designed for the detection of
eye corners in the eye regions. It turns out that the
”CoordConv-layer” significantly improves the accu-
racy for the regression results of eye corners. We do
not need an exact output of the corners of both eyes,
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
602

because cascading the two CNNs improves the recog-
nition accuracy for the eye regions sufficiently. Our
coarse-to-fine approach realised by the two CNNs op-
timises the accuracy and reliability. We defined eye
regions of the Multi-Data MTCNN as a new input
for the CorCNN to improve the recognition of both
eye corners. As underlined by our experiments, it is
shown that the CorCNN detects the corners of the eye
better than before, no matter in which direction the
eyes or in which orientation the head is. Compared
to the detection accuracy for the eye corners in Fi-
gure 3 e) and Figure 4 b), an improved detection is
achieved as well with the cascaded two CNNs. Furt-
her examples are illustrated in Figure 3 f) Figure 4
a) and Figure 3 h) and Figure 4 c). Our approach
is not as accurate in mouth detection as the Dlib-ml
method, but we recognise facial features in side faces
in which the Dlib-ml method does not recognise the
landmarks. The multi view training of our Multi-Data
MTCNN without the addition of the KCF can identify
some side faces. If the head orientation converges to
the limited angle for sides face during tracking, we
switch to our KCF based tracker. Moreover, it impro-
ves the results of real time detection of the eye regi-
ons in side faces. For the permanent calculation of the
head orientation, we achieve an average tracking rate
of 20 ms. The Dlib-ml method is not robust against la-
teral faces because it is not designed for lateral faces,
but the achieved tracking rate can be higher 18 ms. In
addition, it is worth mentioning that our detection rate
is 100 %, while Dlib-ml only scores to 96.8 %.
Figure 3: Detection results of facial features for our method
(red), Dlib-ml (green) and Ground Truth Data (yellow).
Figure 4: Coarse-to-fine results of our CorCNN.
3.2 Head Pose Estimation
For head pose estimations we tested with the Head
Pose Images (Gourier et al., 2004) using the Deep-
Gaze method (Patacchiola and Cangelosi, 2017). The
Head Pose Images consists of 15 images of 15 diffe-
rent people, wearing glasses or not and of various skin
colors. Each set contains 2 series of 93 images of the
same person in different poses. The head orientation
is determined by 2 angles, which varies from −90° to
90°. The head orientations are not continuously recor-
ded, but distributed at intervals of 15°. The average
detection time of our method is about 44 ms and the
from DeepGaze 5 ms. The difference can be explai-
ned by the need to first extract facial features with
our Multi-Data MTCNN and then refine our coarse-
to-fine CorCNN to improve the accuracy. As a com-
parison DeepGaze is a rapid end-to-end structure that
directly outputs the head pose orientation. We only
need the head orientation to distinguish between front
faces and side faces and then we switch to our MT-
CNN and our KCF tracker. Figure 6 shows the AME
and standard deviation (STD) for the two approaches.
The angular deviations of a vertical (yaw) or horizon-
tal (pitch) head rotation is significantly smaller by our
method. The estimated average angular deviation of
our method is 10° in comparison to 15° with a STD
of 0.1° to 0.2°. DeepGaze has a deviation greater than
or equal to 25° for both angles with a STD of 0.2° to
0.4°. Due to our high accuracy, the calculation time
increases in comparison to DeepGaze.
Figure 5: Head orientation results of our method (red),
DeepGaze (green) and Ground Truth data (yellow).
3.3 Eye Gaze Direction
For the evaluation of eye gaze tracking, all previ-
ously determined facial features are transferred into
the Facial Features Based Eye Gaze Model, see Fi-
gure 1. Our whole CNN-based tracking pipeline is
then compared in terms of accuracy and robustness
with the OpenFace approach (Amos et al., 2016) eva-
luated with the Columbia Gaze dataset (A. Smith
et al., 2013). The Columbia Gaze dataset is a large
publicly available gaze dataset with 5, 880 images of
56 people (21 of them wearing glasses) over varying
gaze directions and head poses. There are 5 head po-
ses and 21 gaze directions per head pose. Figure 7
Real Time Eye Gaze Tracking System using CNN-based Facial Features for Human Attention Measurement
603
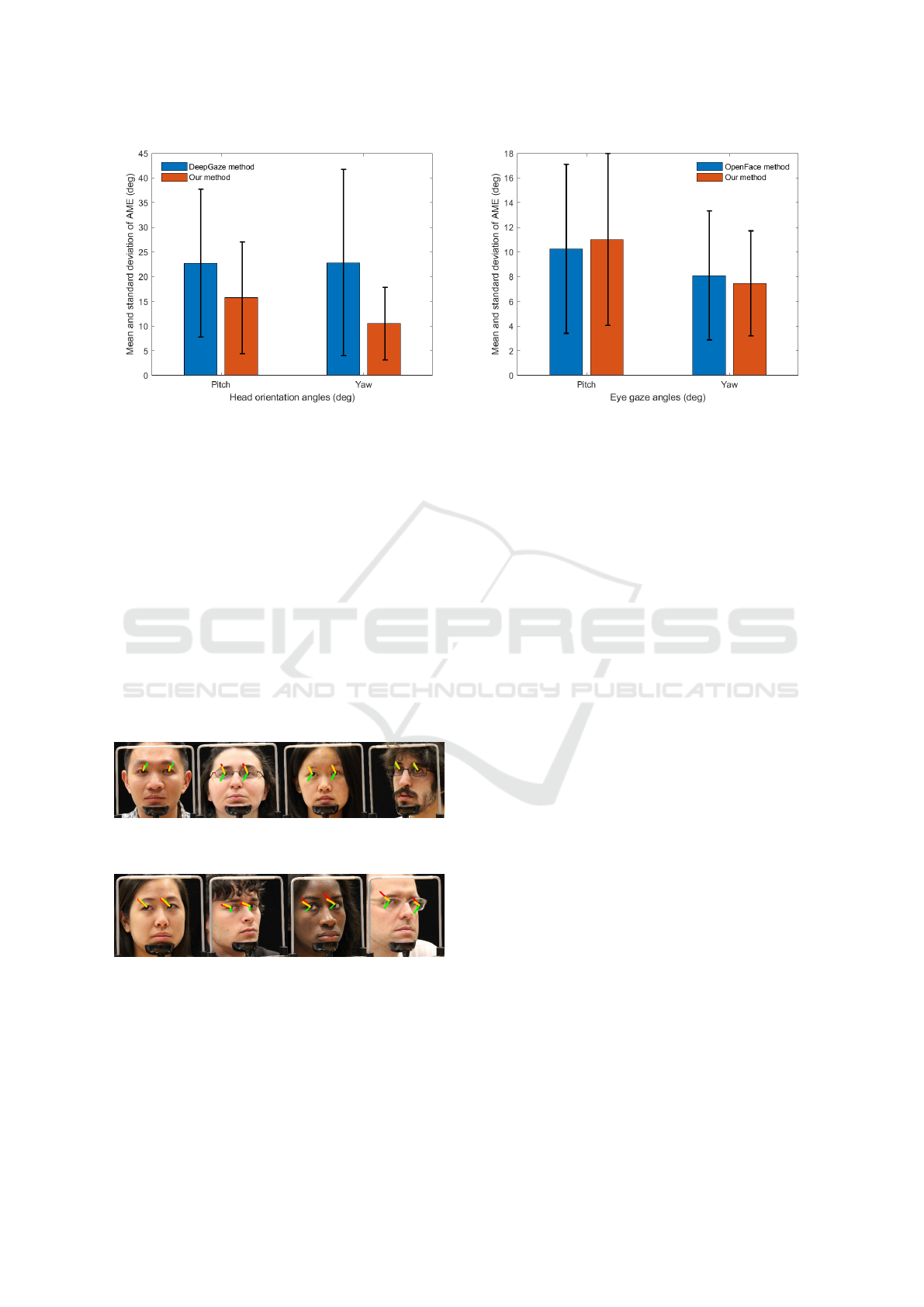
Figure 6: Mean and standard deviation of the head pose.
and Figure 8 show that there are no significant diffe-
rences in the accuracy of the gaze direction between
our approach and the OpenFace. However, our met-
hod is robust against head orientations, which shape
lateral facial views in the image plane. The detection
accuracy of OpenFace decreases in side faces. In con-
trast to OpenGaze, we achieve a stable detection rate
for front faces as well as side faces. As illustrated
in Figure 7 and 8, we estimate the gaze direction in
most cases, but as shown in Figure 8 the black back-
ground seriously affected the pupil centre calculation,
because they are computed based on the image gra-
dient, and the black regions gain a large weight accor-
ding to intensity values. Each method has its strengths
and weaknesses in precision, but both are better in the
pitch angle than in the yaw angle.
Figure 7: Eye Gaze results of our method (red), OpenFace
(green) and Ground Truth data (yellow).
Figure 8: Eye Gaze results of our method (red), OpenFace
(green) and Ground Truth data (yellow).
3.4 Dynamic Environments
For some applications, we focus on industrial work
cells and service-oriented supermarket environments.
In both environments various humans appear where
some of them wear glasses and keep their heads in
Figure 9: Absolute mean and standard deviation of eye gaze
direction.
different orientations. Many people wear glasses that
partially cover the human eyes or create reflections
through reflective lenses. Our method robustly de-
tects the eye gaze direction in many different scena-
rios where some of the humans wear glasses, refer
to Figure 11. Many methods from the state of the
art show inaccuracies and errors. By using the KCF,
we can eliminate some of these errors, e.g. the limi-
tation due to reflection of lenses have been reduced.
This elimination is important, because landmark de-
tection for the faces and eye regions have been pre-
viously inaccurate and produced a large error rate,
which can be reduced by our new approach. Limitati-
ons of current methods concern tracking of eye gazes
in lateral faces. All CNNs are based on training data-
sets, which consist of series of frontal images. There-
fore, the tracking of faces seen in side views is diffi-
cult, because of missing training datasets. With pre-
vious solutions, facial occlusions often result in failu-
res for eyes gaze estimation. Our method overcomes
this problem by exploiting symmetry using the KCF
instead of the facial features to calculate the eye gaze
direction after a certain vertical head rotations. When
faces are seen from the side view, half of the faces are
occluded. Our algorithm assumes symmetry and cal-
culates the eye gaze direction robustly. This solution
works because the eyes perform a synchronous mo-
vement in the gaze direction normally. Seen in Figure
10, the eye gaze is always only for the non-occluded
eye. In the middle lower picture in Figure 10 it can be
seen, that the symmetry of the gaze can be projected
onto the other eye.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
604

4 CONCLUSIONS
We propose a CNN-based facial features gaze
tracking system to track eye gaze based on facial fea-
tures and head orientations in dynamic environments.
It is able to estimate human eye gazes as a significant
measurement for the ability of humans to interact with
their counterparts. Our approach recognises eye gazes
in extreme conditions robustly and with a good relati-
onship between accuracy and real time performance.
Our angle-based approach of the head orientation dif-
ferentiates between front faces and side faces and al-
lows us to switch specifically between the different
CNNs and the detection of image filters. With the
aid of the suggested cascaded CNNs, the eye regions
can be further refined and the detection of facial fe-
atures are improved in order to counteract reflections
and by masking in a robust manner. Furthermore, dis-
tinctions can be made in the future between open and
closed eyes in order to improve safety in human-robot
interaction.
Figure 10: Eye gaze tracking for side faces.
Figure 11: Eye gaze tracking when wearing eyeglasses.
REFERENCES
A. Smith, B., Yin, Q., K. Feiner, S., and K. Nayar, S.
(2013). Gaze locking: Passive eye contact detection
for human-object interaction.
Amos, B., Ludwiczuk, B., and Satyanarayanan, M. (2016).
Openface: A general-purpose face recognition library
with mobile applications. Technical report.
Chinsatit, W. and Saitoh, T. (2017). Cnn-based pupil cen-
ter detection for wearable gaze estimation system.
2017:1–10.
Deng, H. and Zhu, W. (2017). Monocular free-head 3d gaze
tracking with deep learning and geometry constraints.
2017 IEEE International Conference on Computer Vi-
sion, pages 3162–3171.
Doll
´
ar, P., Welinder, P., and Perona, P. (2010). Cascaded
pose regression. In 2010 IEEE Computer Society Con-
ference on Computer Vision and Pattern Recognition,
pages 1078–1085.
E. King, D. (2009). Dlib-ml: A machine learning toolkit.
10:1755–1758.
Fischer, T., Jin Chang, H., and Demiris, Y. (2018). Rt-
gene: Real-time eye gaze estimation in natural envi-
ronments. In The European Conference on Computer
Vision.
Gee, A. and Cipolla, R. (1994). Determining the gaze
of faces in images. Image and Vision Computing,
12(10):639–647.
George, A. and Routray, A. (2016). Real-time eye gaze di-
rection classification using convolutional neural net-
work. pages 1–5.
Gourier, N., Hall, D., and Crowley, J. L. (2004). Estimating
face orientation from robust detection of salient facial
structures. In FG Net Workshop on Visual Observation
of Deictic Gestures.
Le, V., Brandt, J., Lin, Z., Bourdev, L., and Huang, T. S.
(2012). Interactive facial feature localization. In Com-
puter Vision, pages 679–692.
Lemley, J., Kar, A., Drimbarean, A., and Corcoran, P.
(2018). Efficient cnn implementation for eye-gaze es-
timation on low-power/low-quality consumer imaging
systems.
Li, B. and Fu, H. (2018). Real time eye detector with cas-
caded convolutional neural networks. 2018:1–8.
Liu, Y., Wu, Q., Tang, L., and Shi, H. (2017). Gaze-assisted
multi-stream deep neural network for action recogni-
tion. IEEE Access, 5:19432–19441.
Mukherjee, S. S. and Robertson, N. M. (2015). Deep head
pose: Gaze-direction estimation in multimodal vi-
deo. IEEE Transactions on Multimedia, 17(11):2094–
2107.
Palermo, R. and Rhodes, G. (2007). Are you always on my
mind? a review of how face perception and attention
interact. Neuropsychologia, 45(1):75–92. The Percep-
tion of Emotion and Social Cues in Faces.
Parks, D., Borji, A., and Itti, L. (2015). Augmented saliency
model using automatic 3d head pose detection and le-
arned gaze following in natural scenes. Vision Rese-
arch, 116:113–126. Computational Models of Visual
Attention.
Patacchiola, M. and Cangelosi, A. (2017). Head pose es-
timation in the wild using convolutional neural net-
works and adaptive gradient methods. 71.
Rowley, H. A., Baluja, S., and Kanade, T. (1998). Neural
network-based face detection. IEEE Transactions on
Real Time Eye Gaze Tracking System using CNN-based Facial Features for Human Attention Measurement
605

Pattern Analysis and Machine Intelligence, 20(1):23–
38.
Sun, Y., Wang, X., and Tang, X. (2013). Deep convolutio-
nal network cascade for facial point detection. In 2013
IEEE Conference on Computer Vision and Pattern Re-
cognition, pages 3476–3483.
Yang, S., Luo, P., Loy, C. C., and Tang, X. (2015). From fa-
cial parts responses to face detection: A deep learning
approach. CoRR, abs/1509.06451.
Yang, S., Luo, P., Loy, C. C., and Tang, X. (2016). Wider
face: A face detection benchmark. 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 5525–5533.
Zhang, K., Zhang, Z., Li, Z., and Qiao, Y. (2016). Joint
face detection and alignment using multi-task casca-
ded convolutional networks. CoRR, abs/1604.02878.
Zhao, X., Meng, C., Feng, M., Chang, S., and Zeng, Q.
(2018). Eye feature point detection based on single
convolutional neural network. IET Computer Vision,
12(4):453–457.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
606
