
Semi-automatic Training Data Generation for Semantic Segmentation
using 6DoF Pose Estimation
Shuichi Akizuki
1,2
and Manabu Hashimoto
2
1
Department of Electrical Engineering, Keio University, Hiyoshi, Yokohama, Japan
2
Department of Engineering, Chukyo University, Nagoya, Aichi, Japan
Keywords:
Dataset Generation, Semantic Segmentation, Affordance.
Abstract:
In this research, we propose a method using a low cost process to generate large volumes of real images as
training data for semantic segmentation. The method first estimates the six-degree-of-freedom (6DoF) pose
for objects in images obtained using an RGB-D sensor, and then maps labels that have been pre-assigned to
3D models onto the images. It also captures additional input images while the camera is moving, and is able
to map labels to these other input images based on the relative motion of the viewpoint. This method has
made it possible to obtain large volumes of ground truth data for real images. The proposed method has been
used to create a new publicity available dataset for affordance segmentation, called the NEDO Part-Affordance
Dataset v1, which has been used to benchmark some typical semantic segmentation algorithms.
1 INTRODUCTION
Achieving use of tools by robotic arms is one of im-
portant goal in the field of intelligent robotics. It re-
quires: 1) Developing a gripper with which to grasp
an object, 2) Generating grasping motions required
to use the grasped object, and 3) Estimating of the
type of actions that are supported by an object of that
type (this is called affordance of the object). Of these
sub-tasks, estimating affordance needs to be proces-
sed first, so it is particularly important, and has been
an active research topic in the past several years.
Generally, affordance estimation is considered to
be a semantic segmentation problem, of assigning
pre-defined affordance labels to each pixel of an ob-
ject in an image. However, different parts of ever-
yday objects have different affordance types, so it
has been extremely expensive to create correct data
for training. For example, the handle of a hammer
would have an affordance of Grasp because it can be
held in the hand, while the head would have an af-
fordance of Pound because it can be used to hit other
objects. Further, more than 10k training images taken
from multiple viewpoints are needed to create a high-
performance classifier, so it is not practical to apply
these labels manually.
In this research, we propose a method involving a
low-cost procedure to generate large volumes of ima-
ges that are suitable for training a classifier to solve
semantic segmentation problems. Specifically, affor-
dance labels are pre-assigned to 3D models of the ob-
jects to be recognized, and these labels are mapped
onto images by estimating the 6DoF pose of these ob-
jects in images captured using an RGB-D sensor. We
also capture additional input images by moving the
camera, and map the label data onto these other ima-
ges based on the relative motion of the viewpoints.
The approach of the proposed method differs from the
artificial operations referred to as data augmentation,
in that it provides large volumes of training images
with associated ground truth from real measurement
data. The contributions of this research are as follows:
• We propose a method for generating training ima-
ges annotated with pixel-wise labels, using a
semi-automatic procedure with 6DoF pose esti-
mation.
• We propose a new dataset for estimating the affor-
dance of object parts, created using the proposed
algorithm. The dataset can be downloaded from
our website
1
.
• We use this dataset to benchmark some prominent
semantic segmentation algorithms.
In section 2, we discuss recent trends regarding af-
fordance estimation and semantic segmentation met-
hods. In section 3 we discuss a dataset for affordance
1
http://isl.sist.chukyo-u.ac.jp/archives/nedopro/
Akizuki, S. and Hashimoto, M.
Semi-automatic Training Data Generation for Semantic Segmentation using 6DoF Pose Estimation.
DOI: 10.5220/0007568706070613
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 607-613
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
607

segmentation that we have created, called the NEDO
Part Affordance Dataset v1. In section 4, we describe
the low-cost ground-truth annotation procedure using
6DoF pose estimation, which we proposed for crea-
ting this dataset. In section 5, we describe benchmark
tests done on de-facto standard semantic segmenta-
tion methods using the NEDO Part Affordance Data-
set v1, and in section 6, we summarize the results of
this research.
2 RELATED WORK
2.1 Affordance Estimation
Various earlier methods have been proposed for esti-
mating affordance of objects appearing in a scene.
One approach is to model human poses for affor-
dance, and to evaluate their consistency with real sce-
nes. For example, one procedure for handling the sit-
table affordance is to prepare a human model in sitting
poses, and then compare it with input scenes (Grab-
ner et al., 2011). This approach is also closely rela-
ted to Robotic grasping, and a method proposed for
estimating graspability by comparing hand state with
measurement data (Domae et al., 2014)
Recently, the main approach has been to train for
the correspondence between affordance and local fea-
tures extracted from the input scene to identify multi-
ple affordance values. Affordance estimation is being
solved using so-called multi-class classifiers. Myers
et al. proposed a method that estimates seven affor-
dances (Grasp, Cut, Scoop, Contain, Pound, Support,
Wrap-grasp) for everyday objects at the pixel level.
The method trains for so-called hand-crafted local
features such as depth, color, and curvature, which
are obtained from depth images of the everyday ob-
jects(Myers et al., 2015).
Prompted by efforts such as Seg-
Net(Badrinarayanan et al., 2017), which have
had success using Deep Learning (DL) for semantic
segmentation, there has also been active research
applying DL to estimation of affordances. Nguyen
et al. proposed a method to estimate the affordance
defined by Myers et al. using an encoder-decoder
network, which demonstrated superiority for hand-
crafted features(Nguyen et al., 2016). Another
method that performs object-detection as a prior
step, and then uses a network to estimate object class
and affordance for each detected object region, has
also been proposed(Do et al., 2018). Other methods
have also been proposed, implementing affordance
segmentation by taking RGB input images and
using networks to estimate mid-level features, depth
information, normal-vectors and object classes(Roy
and Todorovic, 2016).
2.2 Semantic Segmentation
Semantic segmentation is the task of estimating the
class to which each pixel of an input image belongs.
Fully Convolutional Networks(Long et al., 2015)
implement the semantic segmentation task by using
convolutional layers that output 2D heatmaps to re-
place the fully-connected layers of classification net-
works used in methods like VGG(Simonyan and Zis-
serman, 2014) and AlexNets(Krizhevsky et al., 2012).
SegNet(Badrinarayanan et al., 2017) is an encoder-
decoder network. The decoder is able to discrimi-
nate accurately by gradually increasing resolution. U-
Net is able to reflect segmentation results on detailed
shapes in the input image by concatenating the fea-
ture maps of each encoder with the decoder feature
maps(Ronneberger et al., 2015).
3 PROPOSED DATASET
3.1 Dataset Overview
We now describe the NEDO Part Affordance Dataset
v1 proposed for affordance segmentation in this rese-
arch. The dataset is composed of the following data.
• 3D models created from measurements of real
everyday objects with point-wise annotation.
• Multiple RGB-D images of these everyday ob-
jects.
• Ground-truth images with pixel-wise annotation,
corresponding to the RGB-D images.
Examples of data in the NEDO Part Affordance
Dataset v1 are shown in Figure 1. Examples of object
models are shown in Figure 1(a). Object models are
composed of meshes with affordance labels on each
vertex. The colors on the 3D models indicate affor-
dance labels as defined in Table 2. All objects in the
dataset were measured using a precise 3D sensor, and
modeled with actual-size dimensions. The affordance
labels are defined in Table 2. These include labels de-
fined by Myers et al. with the additional labels, Stick,
None, and Background. A total of 74 3D models of
10 types of kitchen and DIY tools were measured. A
breakdown of the objects is given in Table 1.
Figure 1(b) gives examples of input images and
ground truth. A total of 10125 images were prepared,
which were divided into 8706 training set and 1419
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
608
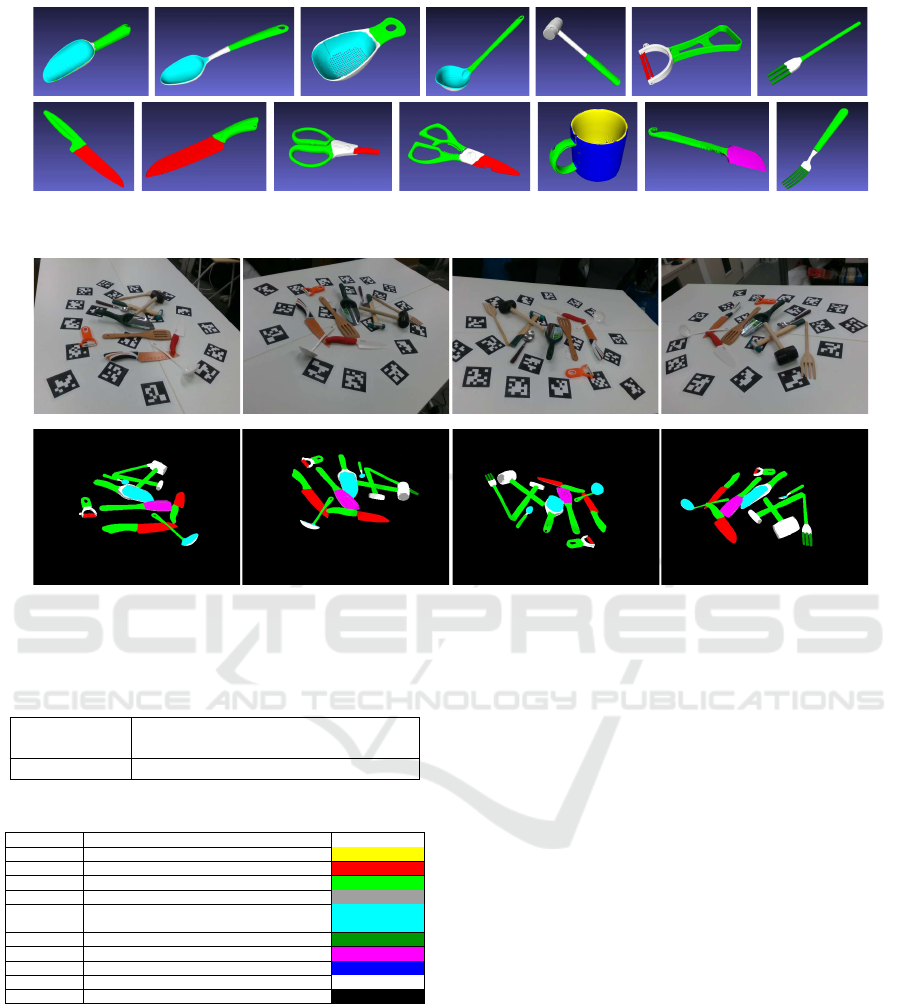
(a) Object models with affordance annotation
(b) Input scene and corresponding ground truth
Figure 1: Examples of object models in the dataset and scene images. (a) Object models. Colors indicate the affordance
labels. (b) Scene images and corresponding ground truth.
Table 1: Types and number object models in the dataset.
Kitchen tools
Fork(9), Knife(8), Ladle(6), Mug(4),
Peeler(10), Spatula(11), Spoon(8)
DIY tools Hammer(4), Scissors(9), Shovel(5)
Table 2: Affordance labels and its label colors.
Affordance Functionality Color
Contain With deep cavities to hold liquid. (255,255,0)
Cut Used for separating another object. (255,0,0)
Grasp Can be enclosed by a hand. (0,255,0)
Pound Used for striking other objects. (160, 160, 160)
Scoop
A curved surface with a mouth for
gathering soft material.
(0, 255, 255)
Stick Sharp parts that can be pushed into something. (0,150,0)
Support Flat parts that can hold loose material. (255,0,255)
Wrap-grasp Can be held with the hand and palm. (0,0,255)
None Other region on objects (255,255,255)
Background Other region outside of objects. (0,0,0)
testing set. Each pixel of the ground truth images in-
dicates an affordance label. Each scene contains 5 to
11 (avg. 7.97) of the objects, selected and arranged at
random.
3.2 Data Acquisition
The object models consist of mesh data measured
from a full perimeter. A Solutionix C500 3D scan-
ner from Medit Inc. was used for measurements,
and mesh data comprised roughly 500,000 vertices for
each object. For the scene data, objects were arranged
on a table with several Augmented Reality (AR) mar-
kers, and for each arrangement, approximately 250 to
300 frames of RGB and depth images with resolution
of 640x480 pixels were recorded. An Intel D415 3D
sensor was used for these images. The AR markers
were used for semi-automatic annotation, as descri-
bed in the following section.
4 SEMI-AUTOMATIC
ANNOTATION
4.1 Algorithm
We use a semi-automatic process to generate ground
truth images with pixel-wise annotation for input ima-
ges I
i
, i = {1, ...n}, taken from multiple viewpoints. i
represents the viewpoint index of the captured image.
The algorithm consists of three steps, as shown in Fi-
gure 2.
1. 6DoF pose annotation
Semi-automatic Training Data Generation for Semantic Segmentation using 6DoF Pose Estimation
609
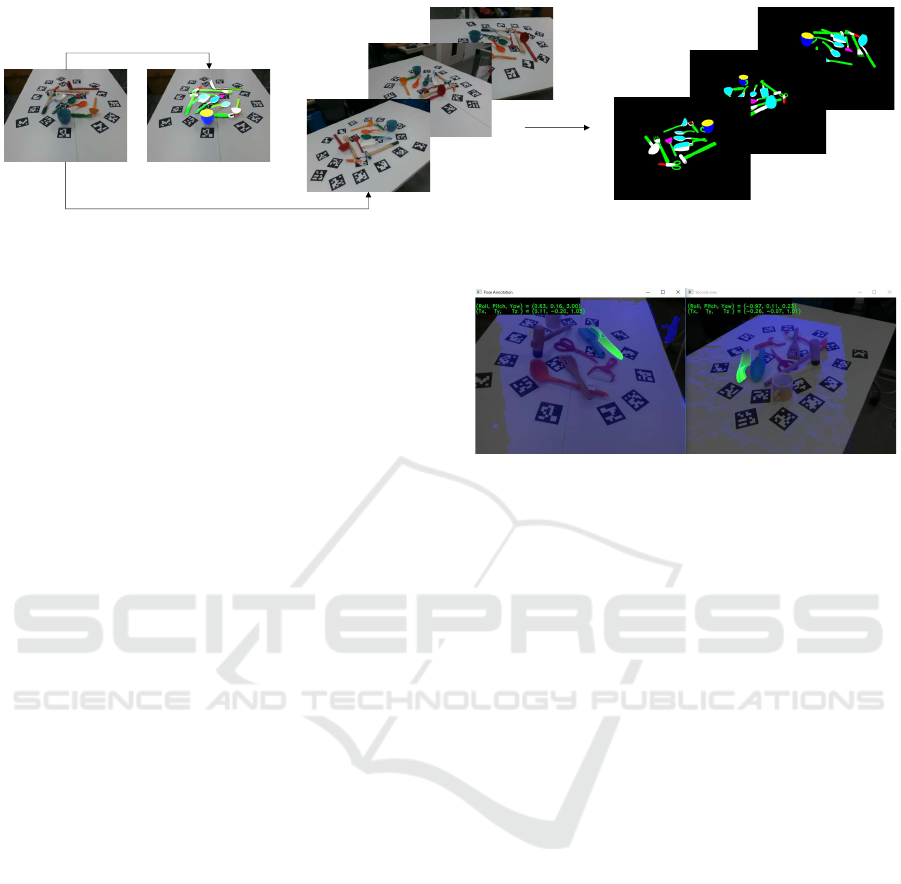
2. Camera pose estimation using ArUco
1. 6DoF pose annotation for I
1
3. GT image rendering
Figure 2: Ground truth data generation using semi-automatic process.
2. Camera pose estimation using ArUco(Garrido-
Jurado et al., 2014)
3. Groud truth image rendering
In Step 1, the pose of each object in the first
frame is computed using specially developed anno-
tation software. In Step 2, the ArUco library, which
is able to compute the pose of the AR markers accu-
rately, is used to compute changes in the camera pose
between the first frame and the other frames. In Step
3, the ground truth images are rendered based on the
pose data computed in Steps 1 and 2. Details of each
step are given below.
4.2 6DoF Pose Annotation
This module performs annotation of the 6DoF pose
T
M
j
= [R, t;0, 1], for each object M
j
, j = {1, ..., k} in
the first frame of input image I
1
. R is a 3 × 3 rotation
matrix, and t is a 3 × 1 translation vector.
We developed dedicated software for 6DoF pose
annotation for this research. A screen shot of the soft-
ware is shown in Figure 3. The annotation software
allows object models to be transformed to a suita-
ble pose using keyboard and mouse operations. The
image on the left shows object model (Knife) over-
laid on the image I
1
in green. Depth data for I
1
is also
overlaid in blue. The image on the right is an image
taken from a different viewpoint, also input when the
software was started, with transformation applied to
the object model synchronized with the image on the
left. Accurate annotation can be done by checking the
fit of the object model on both images. The software
provides commands for the following operations.
Step Move: Provides fine adjustment of the pose in
the x, y, and z directions and in the roll, pitch and
yaw angles using keyboard input.
Direct Move: Moves the object to the position
clicked on the image by translation.
ICP: Estimates the pose of the object model using
the ICP algorithm (Besl and McKay, 1992), using the
model’s current position as the initial position.
Figure 3: Screen shot of the 6DoF pose annotator. The ob-
ject model is rendered in green over images from two view-
points. Accurate annotation can be done by checking over
RGB images from two different viewpoints.
Direct move can be used to move the object model
to near the position of the object in the scene, and
then ICP can be used to compute the pose accurately.
Occlusions can occur due to the placement of objects,
so there are cases when the pose cannot be estimated
using ICP. Step move is used for fine tuning in such
cases. These operations are used to compute the 6DoF
pose T
M
j
, j = {1, ..., k} for each object in I
1
.
4.3 Camera Pose Estimation
This module computes the transformation matrix T
C
i
from the camera position for capturing I
1
to the ca-
mera position for capturing I
i
. ArUco is first used
to compute the 6DoF poses T
i, j
of the AR mar-
kers in each image. j represents the marker ID.
Then, the transformation matrix is computed as T
C
i
=
avg(T
1, j
T
−1
i, j
). avg() computes an average of the
transformations. T
C
i
is detected for several markers.
These are converted to x, y, z, roll, pitch and yaw va-
lues, and the average of each is computed before con-
verting back to a matrix. In this way, a highly accurate
transformation matrix T
C
i
is obtained.
It is also conceivable to find the object model
6DoF poses and annotate the first frame without
using AR markers, by use tracking methods, but there
would be a high risk of failure because occlusions and
camera position can hinder object observations. As
such, we decided to use AR markers, which enable
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
610

transformations between camera poses to be compu-
ted accurately.
4.4 GT Image Rendering
The ground truth image G
i
is obtained by transfor-
ming the object model M
j
and mapping it onto image
I
i
with viewpoint i. If the 3D vertices of object mo-
del M
j
are x, then their position from viewpoint i is
x
0
= T
C
i
T
M
j
x. This computation is applied to all verti-
ces of the models of all objects appearing in the scene.
Then, each x
0
is projected onto the image in order of
decreasing z coordinate, which is from farthest to nea-
rest to the camera. This produces an image that repre-
sents the front-to-back relationships between objects
correctly. G
i
is generated by setting the pixel values
to the pre-assigned affordance labels on the objects.
5 EXPERIMENTS
5.1 Annotation Cost
This section discusses the annotation cost when using
the proposed method. With the proposed method, the
pose of each object in a scene is annotated using de-
dicated software for only the first frame in a set of
RGB-D images captured from that scene. After this
annotation is applied, pixel-wise annotation is applied
automatically to all other frames.
6DoF pose estimation for a single scene using the
software required approximately 15 to 20 minutes for
each scene. This produced ground truth images for
the multi-viewpoint images from more than 300 fra-
mes. In contrast, annotation work for general se-
mantic segmentation requires roughly 10 minutes per
image, so using the proposed method dramatically re-
duces the annotation cost relative to earlier methods.
5.2 Benchmarking of Semantic
Segmentation Methods
We used the proposed NEDO Part Affordance Data-
set v1 to benchmark semantic segmentation methods.
The following algorithms were used for comparison.
1. Fully Convolutional Networks (FCN-8s) (Long
et al., 2015)
2. SegNetBasic(Badrinarayanan et al., 2017)
3. U-net (Ronneberger et al., 2015)
The central 320 × 240 pixel part of each image
was cropped and used for training. For FCN-8s, we
used the VGG16 pre-trained model for the Encoder
part, so we cropped to a size of 320 × 256 pixels to fit
the pre-set input size for training.
Each network was trained using Adam gradient
descent optimization(Kingma and Ba, 2014). The le-
arning rate was changed between 10
−2
, 10
−3
, 10
−4
,
and 10
−5
to learn the optimal model parameters. As
a result of our experiments, we achieved the good re-
sult of 10
−4
for all models using our data set. With a
batch size of 10, we repeated for 100 epochs.
To evaluate recognition performance, we used in-
tersection over union (IoU), which is widely used as
an index for segmentation tasks. The IoU for each
affordance label is shown in Table 3, and examples
of recognition results are shown in Figure 4. FCN-8s
had the best average performance. Considering la-
bels individually, the IoU was relatively low for None
compared to other labels. This may be because the
None label is assigned to parts that have no function
as an object, so its shape varies widely, and the label
gets assigned to shapes that are difficult to distinguish
from RGB images, such as the back part and front
part of the spoon. In fact, in the fourth image from
the right in Figure 4, the green spoon is placed facing
down, so the correct label for the visible surface is
None, but all methods estimated it to be Scoop.
The right-most image in Figure 4 contains a scis-
sors that has not provided ground truth image due
to lack of 3D object model. Each of the methods
were able to detect the scissors, so it seems that some
generality has been achieved for variations in object
shapes. This suggests that the proposed data set con-
tains enough diversity for use in training for affor-
dance of everyday objects.
6 CONCLUSION
This research has proposed a method for generating
large volumes of training images for semantic seg-
mentation using a low-cost procedure. The propo-
sed method estimates the 6DoF pose of labeled 3D
models and maps them onto input images to generate
ground truth images. Then, by moving an RGB-D ca-
mera to capture many images and estimating the rela-
tive camera motion, the results of annotating the first
frame are mapped onto all of the images. This pro-
cedure made it possible to obtain a large number of
pixel-wise annotated real images, semi-automatically.
We created the NEDO Part Affordance Dataset v1,
containing 74 detailed 3D models with affordance la-
bels and a set of more than 10,000 annotated ima-
ges. This dataset was used to benchmark some pro-
minent semantic segmentation algorithms. The pro-
Semi-automatic Training Data Generation for Semantic Segmentation using 6DoF Pose Estimation
611
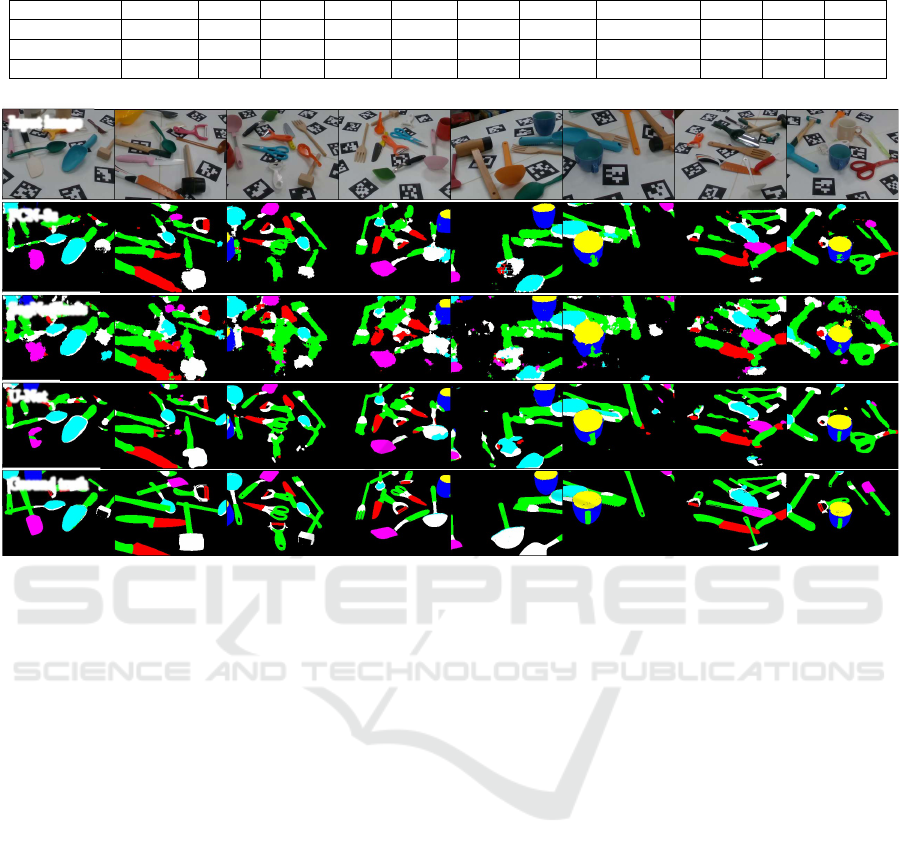
Table 3: IoU score of each affordance label.
Contain Cut Grasp Pound Scoop Stick Support Wrap-grasp None BG Mean
FCN-8s 0.747 0.390 0.441 0.506 0.647 0.500 0.658 0.715 0.386 0.864 0.585
SegNetBasic 0.676 0.318 0.404 0.338 0.558 0.373 0.501 0.622 0.306 0.802 0.490
U-Net 0.744 0.298 0.411 0.139 0.620 0.457 0.446 0.704 0.323 0.852 0.499
Input image
FCN-8s
SegNetBasic
U-Net
Ground truth
Figure 4: Examples of affordance segmentation for each method. From top to bottom, input images, FCN-8sSegNetBasicU-
Netand Ground truth.
posed method can also be used to obtain 6DoF poses
for each viewpoint and instance segmentation results.
In the future, we plan to add to the annotation data
provided by this dataset, so that it can be used to test
other image recognition tasks.
ACKNOWLEDGEMENTS
This work was partially supported by the New Energy
and Industrial Technology Development Organization
(NEDO).
REFERENCES
Badrinarayanan, V., Kendall, A., and Cipolla, R. (2017).
Segnet: A deep convolutional encoder-decoder archi-
tecture for image segmentation. IEEE Transactions on
Pattern Analysis and Machine Intelligence.
Besl, P. and McKay, N. (1992). A Method for Registration
of 3-D Shapes. IEEE Transactions on Pattern Analysis
and Machine Intelligence (PAMI), 14(2):239–256.
Do, T.-T., Nguyen, A., and Reid, I. (2018). Affordance-
net: An end-to-end deep learning approach for object
affordance detection. In International Conference on
Robotics and Automation (ICRA).
Domae, Y., Okuda, H., Taguchi, Y., Sumi, K., and Hirai, T.
(2014). Fast graspability evaluation on single depth
maps for bin picking with general grippers. In Robo-
tics and Automation (ICRA), 2014 IEEE International
Conference on, pages 1997–2004. IEEE.
Garrido-Jurado, S., Mu
˜
noz Salinas, R., Madrid-Cuevas, F.,
and Mar
´
ın-Jim
´
enez, M. (2014). Automatic generation
and detection of highly reliable fiducial markers under
occlusion. Pattern Recognition, 47(6):2280–2292.
Grabner, H., Gall, J., and Van Gool, L. (2011). What makes
a chair a chair? In Computer Vision and Pattern Re-
cognition (CVPR), 2011 IEEE Conference on, pages
1529–1536. IEEE.
Kingma, D. P. and Ba, J. (2014). Adam: A method for sto-
chastic optimization. arXiv preprint arXiv:1412.6980.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Advances in neural information pro-
cessing systems, pages 1097–1105.
Long, J., Shelhamer, E., and Darrell, T. (2015). Fully con-
volutional networks for semantic segmentation. In
Proceedings of the IEEE conference on computer vi-
sion and pattern recognition, pages 3431–3440.
Myers, A., Teo, C. L., Ferm
¨
uller, C., and Aloimonos, Y.
(2015). Affordance detection of tool parts from geo-
metric features. In ICRA, pages 1374–1381.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
612

Nguyen, A., Kanoulas, D., Caldwell, D. G., and Tsagarakis,
N. G. (2016). Detecting object affordances with con-
volutional neural networks. In Intelligent Robots and
Systems (IROS), 2016 IEEE/RSJ International Confe-
rence on, pages 2765–2770. IEEE.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention,
pages 234–241. Springer.
Roy, A. and Todorovic, S. (2016). A multi-scale cnn for
affordance segmentation in rgb images. In Euro-
pean Conference on Computer Vision, pages 186–201.
Springer.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Semi-automatic Training Data Generation for Semantic Segmentation using 6DoF Pose Estimation
613
