
A Proposal for the Classification of Virtual Character
Plessiet C
´
edric
1
, Gagner
´
e Georges
2
and Sohier Remy
1
1
INREV EA4010 AIAC(EA4010), Universit
´
e Paris 8,2 rue de la libert
´
e, Saint-Denis, France
2
Sc
´
enes du monde- cr
´
eation- savoirs critiqu
´
es(EA1753), Universit
´
e Paris 8,2 rue de la libert
´
e, Saint-Denis, France
Keywords:
Virtual Actor, Virtual Reality, Artificial Intelligence.
Abstract:
This paper proposes a classification of virtual actors based on the movement analysis of their creation medium
that we call matrix sculpture. The analysis is based on two concepts: the origin, either internal or external,
of movement and decision. It leads to define four categories, the virtual puppet,the virtual golem, the virtual
actor and the virtual mask.
1 INTRODUCTION
Nowadays, it is common to meet ”virtual actors”, ei-
ther in movies, video games or digital worlds. Some
are referred to as avatars, others as bots, others as dig-
ital humans or virtual companions, the terms being
used most often according to the context in a empiri-
cal way.
Would it not be possible to establish a precise
classification that would allow to class and compare
these different virtual entities? This article propose
a nomenclature based on two concepts: the origin of
movement and the origin of the decision, that provide
with an effective grid for analyzing these virtual enti-
ties.
2 THE THALMAN
CLASSIFICATION
Nadia and Daniel Thalman had established in the ar-
ticle (Thalmann, 1996) a classification of virtual enti-
ties based on 4 categories:
• participants whose gestures are reproduced ”in
the same way” that of the real manipulator thanks
to a motion capture device,
• guided actors whose movements are controlled by
an external manipulator thanks to an input device
(keyboard, mouse, etc.)
• autonomous actors able to interact with their en-
vironments through the use of ”simulated senses”
• interactive perceptive actors able to interact with
other actors, real or virtual
We see a strong link between participants, guided
actors and the notions of mocaptor and manipulactor
described respectively in (Gagner
´
e et al., 2018a) and
(Gagner
´
e et al., 2018b) in a research about theater and
avatar. The mocaptor controls a virtual puppet in a
mimetic way through a capture device , while the ma-
nipulactor controls the same virtual puppet through
other devices.
The boundary between autonomous actors and in-
teractive perceptive actors seems more blurred. And,
if this classification is effective in describing their
work, it seems to us that it is not necessarily suit-
able for more widespread use. For example, in this
classification, what differentiates a virtual entity from
a video game Creatures(Grand and Mindscape, 1996)
whose intelligence interacts with the player and learns
through a artificial neural network, and a non-player
scripted character that we may encounter in an appli-
cation like Facade(Mateas and Stern, 2004)?
3 MATRIX SCULPTURE
In our classification, we assume that all these virtual
entities are above all a geometric shape, which we call
matrix sculpture in order to emphasize that this geo-
metric shape does not express a fixed pose as for a real
sculpture, but a shape that can express multiple poses
by adding controllers capable of manipulating it(see
figure 1).
The matrix sculpture must therefore be thought
in terms of topology (Raitt and Minter, 2000) with a
view to a future deformation. On one hand, the move-
ment controllers receive data from sources that can be
168
Cédric, P., Georges, G. and Remy, S.
A Proposal for the Classification of Virtual Character.
DOI: 10.5220/0007569401680174
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 168-174
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
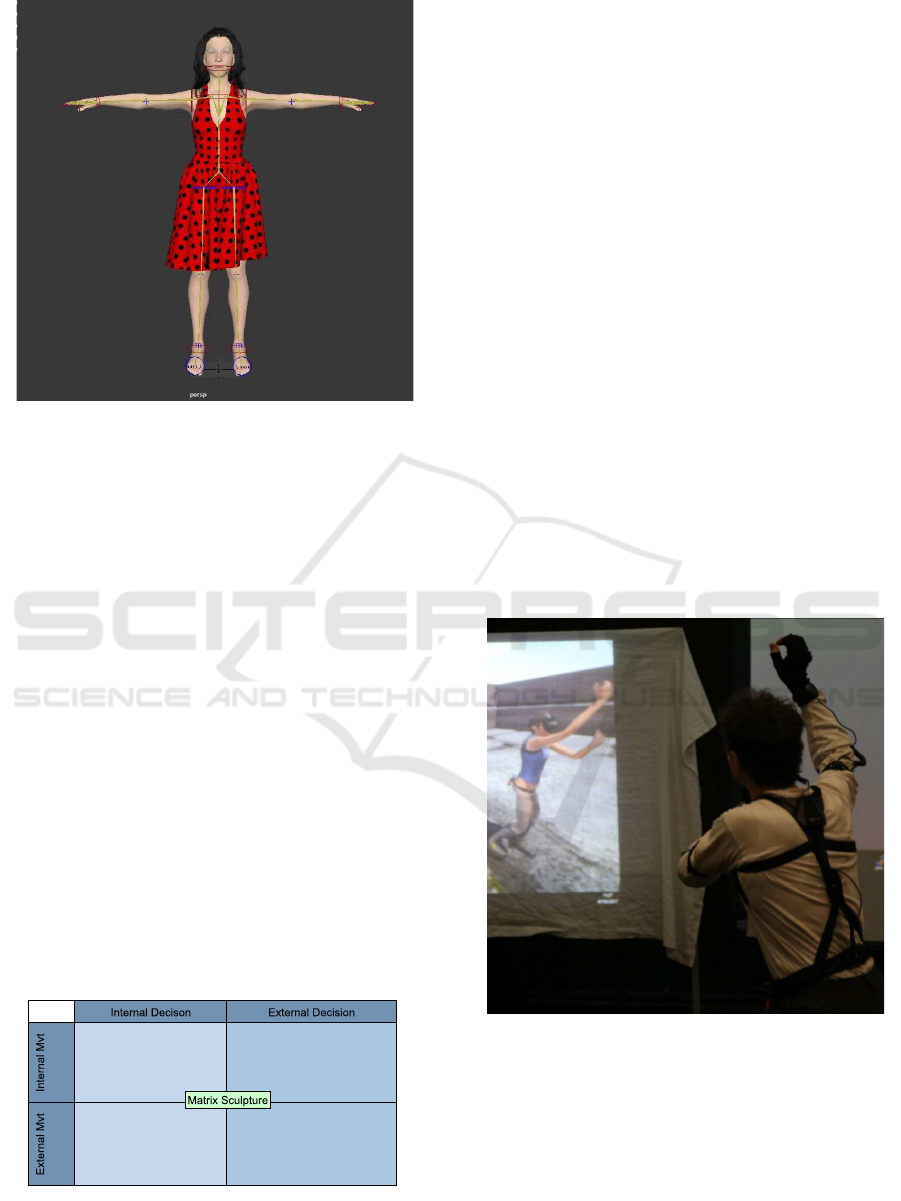
Figure 1: A matrix sculpture with its animation mechanism.
situated in relation with the sculpture matrix. Either
the source has no relation with it and could be consid-
ered as external, or the source is partially influenced
or totally produced by process dependent of the ma-
trix sculpture. We speak then of internal (or partially
internal) sources of movement.
On the other hand, the animated matrix sculpture
is placed in a digital world. We can build a mod-
elization of this world and endow the sculpture with
an algorithm able to interpret this modelization in or-
der to adapt its movement. We call decision of the
movement this process of contextualizing the move-
ment according to an interpretation of a modelization.
When the modelization and the interpretation algo-
rithms are fixed and independent of the matrix sculp-
ture, we say that the movement decision is external.
When the matrix sculpture can modify either the in-
terpretation algorithm or/and the world modelization,
we speak about internal decision. Our classification
consequently derives from two fundamental dimen-
sions, source and decision of movement, that we map
on two axes as following (see figure 2):
Figure 2: Mapping the matrix sculpture on movement and
decision axes.
4 VIRTUAL PUPPET
Adding controllers to the matrix sculpture gives ca-
pacity of movement to this formal envelope originally
based on aesthetic criteria and dynamic possibilities.
Controllers need sources of data, that we consider first
without any connection with the sculpture matrix. For
instance, the manipulative sources may have both hu-
man and algorithmic origins, external to the envelop :
a synthesized image character animated by keyframe
animators, a digital lining controlled by a mocaptor
wearing a motion capture suit or a video game player
character.
Moreover, the relationship between the matrix
sculpture and the world in which it is moving only
derives from the movement sources. The sculpture
matrix has neither perception of its environment, nor
any mean of influencing it. In other words, the con-
textualization process that we called decision is exter-
nal to the matrix sculpture. We nevertheless consider
that some external decisions are closer to the point of
view of the matrix sculpture than others. For instance,
the mocaptor who controls a sculpture matrix with his
own body through a motion capture suit approaches
a better embodiment of it that the manipulactor that
controls it with his hands and devices ( see figure 3).
Figure 3: A mocaptor and its virtual puppet.
We therefore understand that the embodiment will
have a significant impact on the control. We define the
virtual puppet as a entity that has no decision-making
capacity and is manipulated from the outside by an-
other entity (human or algorithmic). There are three
ways to handle it:
• deliberate manipulation: the manipulator is aware
of his manipulative power, he positions himself as
A Proposal for the Classification of Virtual Character
169
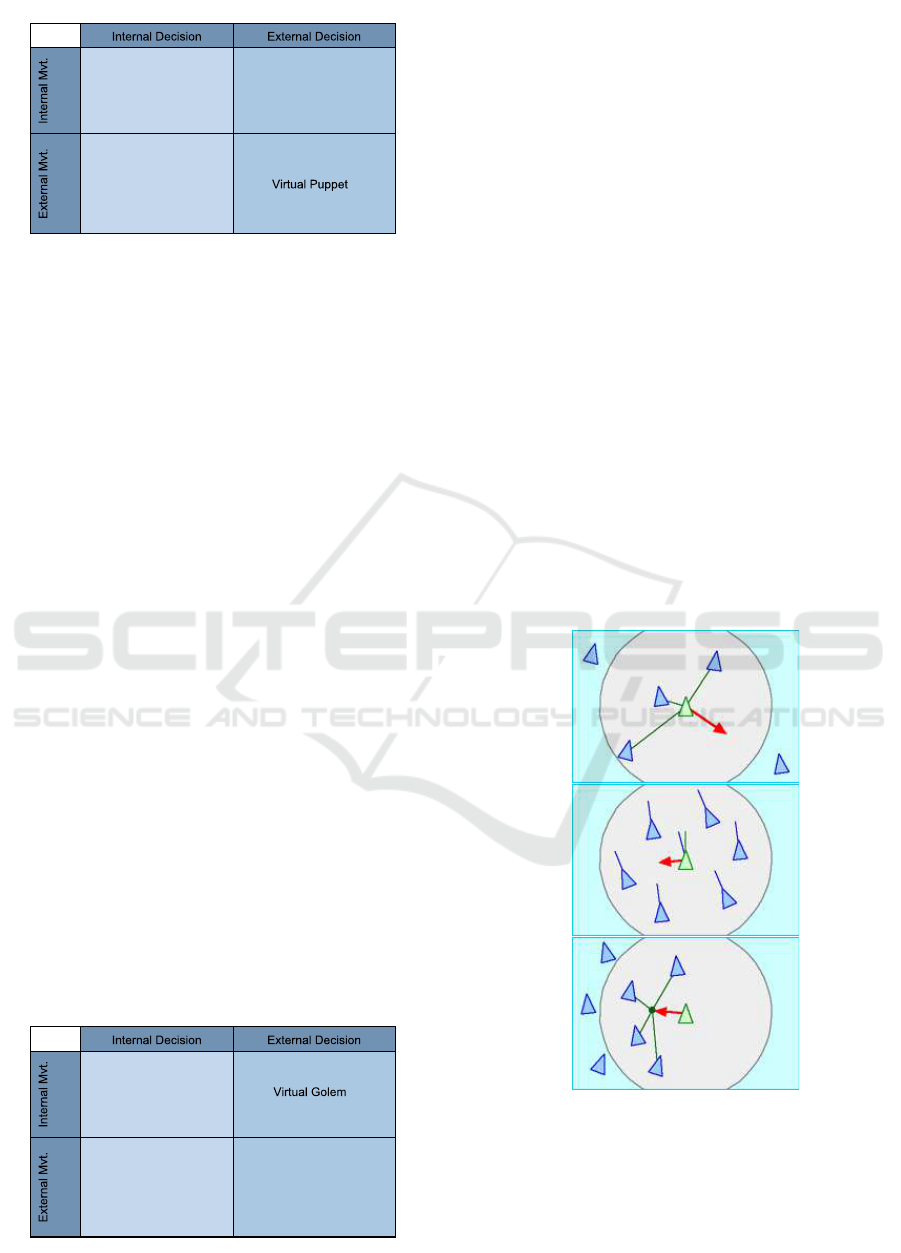
Figure 4: The virtual puppet: decision and movement of
external origin.
the user of a tool because he knows that his actions
lead to a response from the virtual puppet.
• unintentional manipulation: the manipulator does
not know that he animates the virtual puppet, and
therefore does not have a grid of correspondences
between his and its gestures.
• tamed manipulation: the manipulator becomes
aware of his manipulative power and understands
the relationships between his manipulations and
the movements of the puppet as he interacts with
it
The puppeteer is therefore closely linked to his
virtual puppet, which is incapable of movement initia-
tive or decision-making initiative. And the manipula-
tion requires an empathic attention because he has to
”put himself in the place of his virtual puppet” (Gag-
ner
´
e et al., 2018).
5 VIRTUAL GOLEM
The virtual puppet needed an external entity as a
source of movement and process of decision. The
concept of virtual golem is based on a fundamental
difference: it can figure out its environment and re-
act in consequence following external orders. This
makes it able to produce partially internal sources for
its movements inside the environment (see figure 5).
Figure 5: The virtual golem: decision of external origin,
movement of internal origin.
The virtual puppet has a system for receiving
movement input sources from external manipulators,
an output actuation mechanism, and a system for
matching inputs and outputs. The architecture of a
virtual golem is more complex and consists in :
• A mechanism for listening to an environment
modelization
• A mechanism for listening to the manipulator
• A mechanism for interpreting its environment
• An order execution mechanism.
• An actuation mechanism
The virtual golem is equipped with a modelization
of its environment and with algorithms able to receive
external instructions and produce internal movement
answers in relation with the modelization. Even if
these internal answers are generally mixed with ex-
ternal sources, it makes the virtual golem able to par-
tially move by itself, that was impossible for a virtual
puppet. In any case, the environment modelization
and the interpreting and instructing algorithms remain
under the external control of the manipulator, depriv-
ing it of any decision process. As the mythological
figure, the virtual golem only follows orders without
free will.
Figure 6: The three rules of cohesion separation and align-
ment that boids follow(Reynolds, 1987).
Thus we can store video game boxes based on a
number of predefined algorithms (path finding, be-
havior tree), as well as swarm systems. Sometimes,
even if the virtual golem only executes more or less
complex orders after analyzing its environment, we
HUCAPP 2019 - 3rd International Conference on Human Computer Interaction Theory and Applications
170
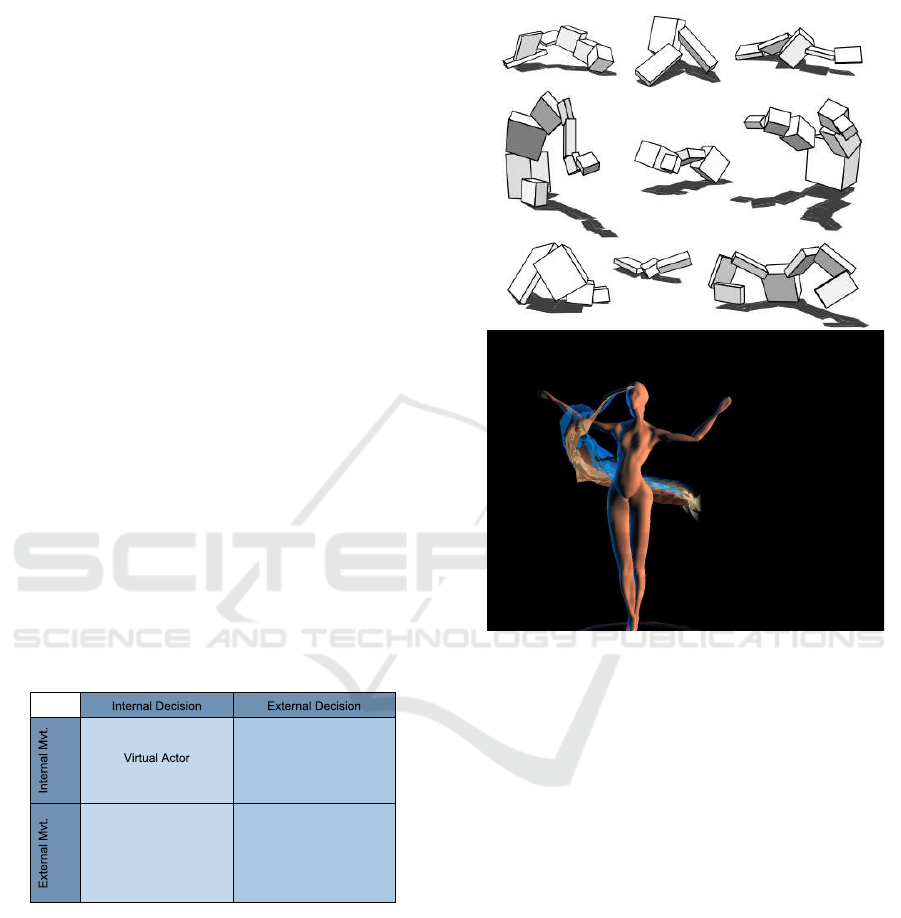
observe behavioral phenomenon, as for boids (see
6), due to the multitude of entities (Reynolds, 1987),
or, as for chat-bots, due to the multitude of imple-
mented rules in syntax analyses such as AIML (Wal-
lace, 2003) or Eliza (Weizenbaum, 1966). Indeed,
even simple virtual golems like the entities of the
game of life, create a chaotic system that makes them
appear as impredictable complex structures.
6 VIRTUAL ACTOR
The virtual golem obeys orders, obediently without
questioning them. It only unrolls an algorithm, pro-
cessed in an modelized environment, without any pos-
sibility to change it neither the environment. An entity
able to add its own rules and change the environment
modelization would become able to take decisions.
We are talking here about learning in the sense of the
memorization processes used by animals or humans
to develop or modify specific behavioral patterns un-
der the influence of their environment and experience.
We realize that there is indeed a memorization
process but that there is also the influence of the en-
vironment and the experience. This entity must be
able to conduct an experiment, that is to test, evaluate
if there is success or failure, and from there draw its
own conclusions. True learning requires some form
of understanding and assimilation, or even question-
ing through experimentation, in order to transform a
belief into an ontology.
Figure 7: The virtual actor: decision and movement of in-
ternal origin.
A virtual actor would therefore be an entity able
to generate its movement like a virtual golem. But
when the latter can’t take any decision, the virtual ac-
tor can change the algorithms modelizing the environ-
ment and giving instructions for movement (see figure
7). Therefore the virtual actor becomes his own arbi-
trator. He is able to generate his decision that triggers
his movement and reciprocally a movement will make
him generate a decision in an enacted step. The vir-
tual actor gains in complexity, but also in autonomy.
In a certain way, a complete internal decision process
endows the matrix sculpture with a free will.
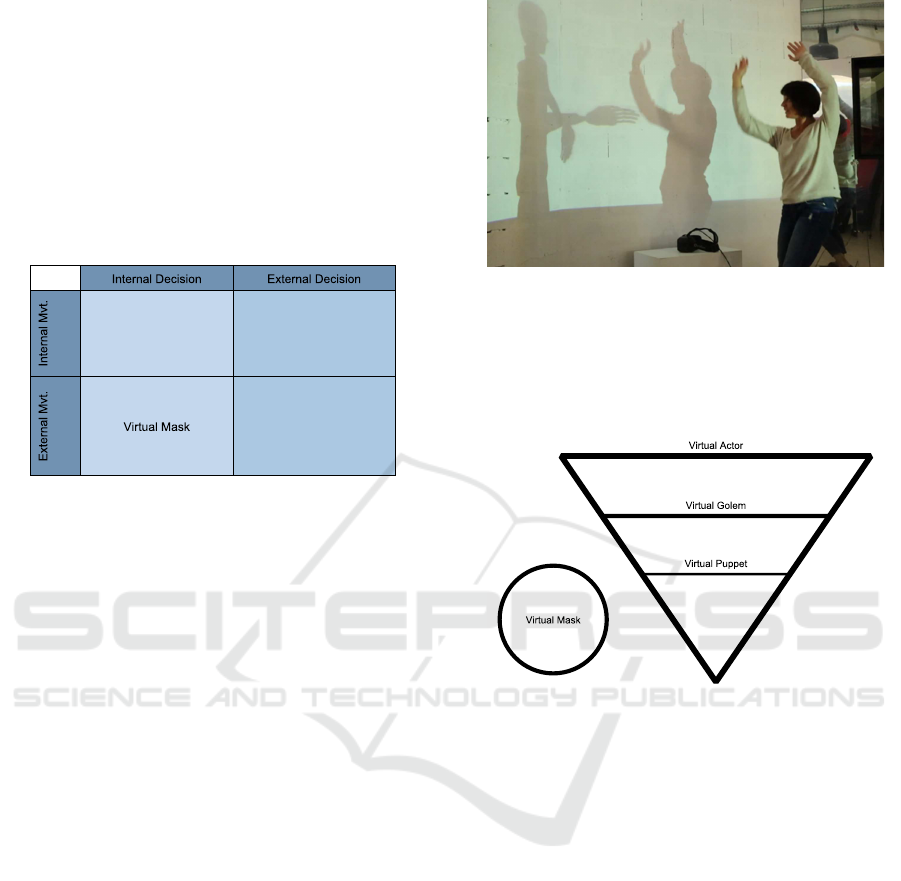
Figure 8: Karl Sims’ creatures(Sims, 1994) and Michel
Bret’s dancer(Thirioux et al., 2009).
Thus Karl Sims’ creatures (Sims, 1994), or Michel
Bret’s characters (Thirioux et al., 2009) or more re-
cent behavioral animation works based on genetic al-
gorithms, or artificial neural networks fall into this
category because they develop their own responses
and strategies in interaction with their environment.
7 VIRTUAL MASK
A fourth entity capable of decision-making but no
movement could be figured out when we study the
concept of autonomy by necessity that Jacques Tis-
seau uses in his description of different forms of au-
tonomy (Tisseau, 2004) :
• Autonomy in essence associated with living organ-
isms and animates
• Autonomy by necessity which is based on a model
that constrains movement, and adapts to changes
in the system.
A Proposal for the Classification of Virtual Character
171
• Autonomy by ignorance whose behavior is not
predictable and tends to organize by itself towards
a goal (teleological behavior).
In autonomy by necessity, the ”model”, external to
the entity, manipulates the entity based on the infor-
mation contained in the model. We propose to call
this last category virtual mask, noting that in a num-
ber of cultures the mask represents a superior entity
(god, spirit...) that takes possession of its carrier (see
figure 9).
Figure 9: The virtual mask: decision of internal origin,
movement of external origin.
The gravity could be considered as a virtual mask
controlling a rag-doll, that is a matrix sculpture
equipped with actuators organized with external rules.
In this case, an untouchable entity manipulates the
matrix sculpture as a dynamic motor. The virtual
mask could also interact with the three other entities,
either virtual actor, virtual puppet or virtual golem.
For example, the sims video game is based on the
joint use of these two categories, the golem for the
different bots encountered, and the masks for intelli-
gent objects that control the different characters.
8 DISCUSSION
This classification made it easier to define the er-
gonomic, structural and conceptual issues that we
encountered in various projects. We point out that
we could have entities capable of oscillating between
puppet, golem and actor. The Cigale project (see fig-
ure 10) (Batras et al., 2016) entails an entity that is:
• a puppet, when controlled by a kinect capture de-
vice,
• a golem when it replays pre-recorded animations
• an actor when it generates new populations of
movements by genetic algorithm.
Should we consider these three states as different
entities or as an entity which plays different charac-
ters? Indeed an virtual actor can play the role of a
Figure 10: Interacting with the Cigale project avatar.
puppet or a golem, but the converse is not true : a
puppet cannot play the role of a golem, and a golem
cannot play the role of an actor (see figure 11).
Figure 11: Interweaving virtual puppet, golem and actor.
We have to quote Norbert Wiener(Wiener, 1964)
and Marvin Minsky(Minsky, 1988), pioneers of the
field who codified forms of learning, which are cur-
rently questioned by deep neural network approaches.
The notion of virtual actor could be further broken
down by taking into account new paradigms leading
to a category called ”virtual being”, which we still
need to reflect on. This notion would perhaps make it
possible to better define virtual entities closer to arti-
ficial life.
The notion of a mask is also subject to further in-
vestigation. Indeed, if in the case of dynamic systems
we are in the presence of a pure algorithmic model,
but for example, in the case of genetic algorithms we
can say that the mask is the fitness function and the se-
lection method used to choose and construct the new
generation.
HUCAPP 2019 - 3rd International Conference on Human Computer Interaction Theory and Applications
172

9 APPLICATION OF THE MODEL
It is now possible for us to differentiate between
the entities of creature(Grand and Mindscape, 1996)
game and facade game. Creatures’s Norns(see figure
12) are therefore learning entities that evolve as they
interact with the environment and the player. These
entities are at the origin of both their decision and
their movement, so they are virtual actors (Taylor,
1997).
Figure 12: the Norn, characters of the game crea-
tures(Grand and Mindscape, 1996).
On the other hand, the characters of Fa-
cade(Mateas and Stern, 2004) follow an established
program based on behaviour trees and natural lan-
guage recognition, so they evolve within a precise
framework and obey their program, they are there-
fore generators of their movement, but the decision-
making process is the result of orders transcribed
in the form of an algorithm by the creators of the
game(see figure 13).
Figure 13: The two main character of Facade(Mateas and
Stern, 2004).
If we have to analyze the game the sims(Wright
and Maxis, 2000), we discover a more complex struc-
ture. The sims themselves are golems that follow and
evolve as part of their program. But the objects them-
selves act as principals: in fact they are the ones that
contain the information of animations and decisions
(Forbus and Wright, 2001). in this case we can see
Figure 14: The Sims(Wright and Maxis, 2000).
them as masks, because they have a decision-making
mechanism, but must use an external entity to gener-
ate the movement (see figure 14).
Figure 15: Siren from Epic Game (Cowley, 2018).
We can similarly describe the Siren digital dou-
ble of Epic Game(Cowley, 2018) (see figure 15) or
Senua from Ninja theory studio (Theory, 2016) as
virtual puppets, because the decision and movement
come from the actor who animates the virtual char-
acter. But we can also identify as a puppet an avatar
of the second-life virtual world or the character of the
pacman video games.
10 CONCLUSION
The reflection started with two questions:
• is the movement of the virtual entity controlled by
itself, or by an external input, human or not?
• does the virtual entity have free will, i.e. take its
own decisions, or does it obey to external orders?
The answers lead to a classification of a virtual enti-
ties, allowing to describe their nature (see figure 16).
The classification aims to provide both a tool and a
basis to define virtual entities. From our experience, it
helps to more effectively describe their relationship to
their virtual environment, their manipulator and their
programming rules.
Movement analysis of the matrix sculpture, a
model with control mechanisms and movement capa-
bilities, brings up four categories:
A Proposal for the Classification of Virtual Character
173
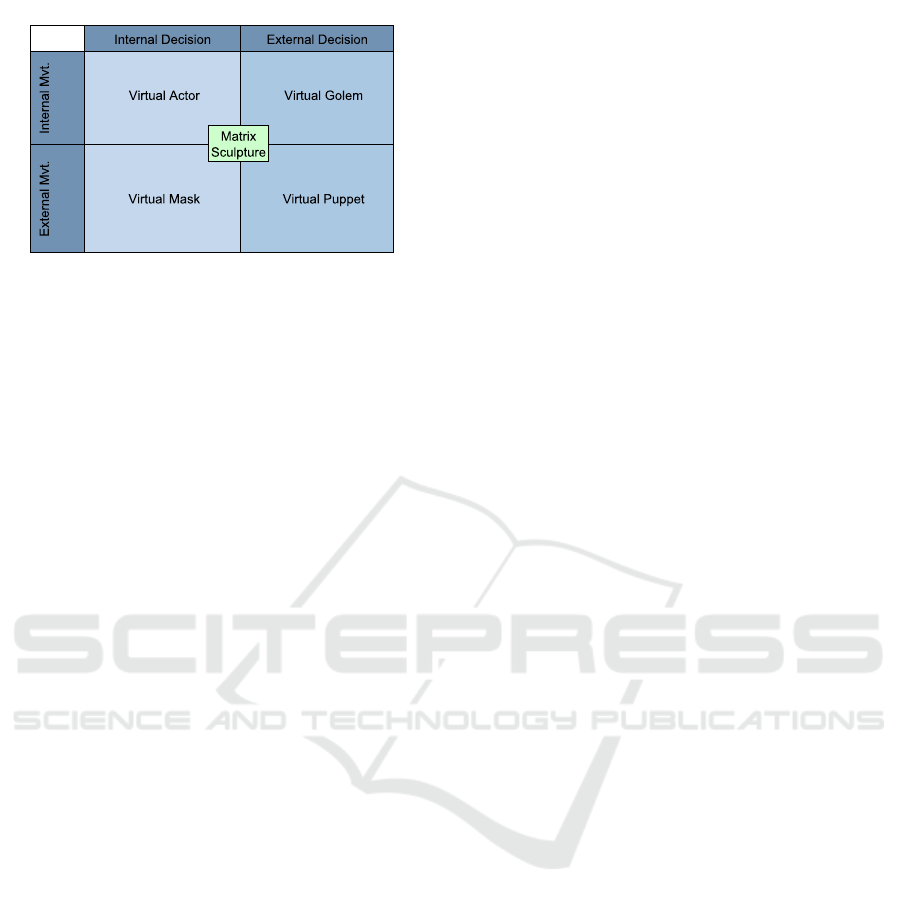
Figure 16: virtual entities classification.
• Virtual puppet whose decision to move and the
origin of the movement comes from an external
entity.
• Virtual golem capable of moving by itself but
without free will.
• Virtual actor who has a freedom of thought and a
capacity for movement by its own will.
• Virtual mask which is an external entity capable of
making decisions, but which manipulates a third
person (such as a puppet, golem or other actor).
This classification helps to differentiate an avatar
(virtual puppet), a bot (virtual golem), or a creature
from artificial life (virtual actor).
REFERENCES
Batras, D., Guez, J., J
´
ego, J.-F., and Tramus, M.-H. (2016).
A virtual reality agent-based platform for improvisa-
tion between real and virtual actors using gestures. In
Proceedings of the 2016 Virtual Reality International
Conference on - VRIC ’16, pages 1–4.
Cowley, D. (2018). Siren at FMX 2018: Crossing the Un-
canny Valley in Real Time.
Forbus, K. D. and Wright, W. (2001). Some notes on pro-
gramming objects in The Sims. Northwestern Univer-
sity.
Gagner
´
e, G., Plessiet, C., Lavender, A., and White, T.
(2018a). The challenges of movement quality using
motion capture in real-time theatrical performance.
In Proceedings of the 5th International Conference
on Movement and Computin, pages 44–53, Genoa
(Italia). ACM.
Gagner
´
e, G., Plessiet, C., and Sohier, R. (2018b). Avatar
Staging : an evolution of a real time framework for
theater based on an on-set previz technology . In
Proceedings of the 2018 Virtual Reality International
Conference on - VRIC ’18, page 4. ACM.
Gagner
´
e, G., Plessiet, C., and Sohier, R. (2018). Intercon-
nected virtual space and theater: A research–creation
project on theatrical performance space in the network
era. In Challenges of the Internet of Things: Tech-
nology, Use, Ethics, volume 7, pages 165–190. Wiley
Online Library.
Grand, S. and Mindscape (1996). Creatures.
Mateas, M. and Stern, A. (2004). Natural language under-
standing in fac¸ade: Surface-text processing. In Inter-
national Conference on Technologies for Interactive
Digital Storytelling and Entertainment, pages 3–13.
Springer.
Minsky, M. (1988). Society of mind. Simon and Schuster.
Raitt, B. and Minter, G. (2000). Digital sculpture tech-
niques. URL, www. izware. com/news/indexa446.
html.
Reynolds, C. W. (1987). Flocks, herds and schools: A dis-
tributed behavioral model. ACM SIGGRAPH Com-
puter Graphics, 21(4):25–34.
Sims, K. (1994). Evolving virtual creatures. In Proceedings
of the 21st annual conference on Computer graphics
and interactive techniques - SIGGRAPH ’94, pages
15–22. ACM.
Taylor, D. (1997). Three ways to get a-life. IEEE Expert,
12(4):25–30.
Thalmann, D. (1996). A New Generation of Synthetic Ac-
tors: the Real-time and Interactive Perceptive Actors.
In Proc. Pacific Graphics, volume 96, pages 200–219.
Citeseer.
Theory, N. (2016). From Previs to Final in Five Minutes —
Siggraph 2016 — Full Presentation.
Thirioux, B., Jorland, G., Bret, M., Tramus, M.-H., and
Berthoz, A. (2009). Walking on a line: a motor
paradigm using rotation and reflection symmetry to
study mental body transformations. Brain and cog-
nition, 70(2):191–200.
Tisseau, J. (2004). Virtual reality and complex-
ity. Manifeste scientifique de l’Ecole Nationale
d’Ing
´
enieurs . . . , pages 1–26. http://enib.fr/ tis-
seau/pdf/paper/manifeste.uk.pdf.
Wallace, R. (2003). The elements of AIML style. Alice AI
Foundation.
Weizenbaum, J. (1966). ELIZA- a computer program for
the study of natural language communication between
man and machine. Communications of the ACM,
9(1):36–45.
Wiener, N. (1964). God and Golem, Inc: A Comment on
Certain Points where Cybernetics Impinges on Reli-
gion. MIT press.
Wright, W. and Maxis (2000). the sims.
HUCAPP 2019 - 3rd International Conference on Human Computer Interaction Theory and Applications
174
