
On-the-Fly Construction of Composite Events in Scenario-Based
Modeling using Constraint Solvers
Guy Katz
1
, Assaf Marron
2
, Aviran Sadon
3
and Gera Weiss
3
1
The Hebrew University of Jerusalem, Jerusalem, Israel
2
Weizmann Institute of Science, Rehovot, Israel
3
Ben-Gurion University of the Negev, Be’er Sheva, Israel
Keywords:
Scenario-Based Programming, Behavioral Programming, Constraint Solvers, SMT Solvers.
Abstract:
Scenario-Based Programming is a methodology for modeling and constructing complex reactive systems from
simple, stand-alone building blocks, called scenarios. These scenarios are designed to model different traits
of the system, and can be interwoven together and executed to produce cohesive system behavior. Existing
execution frameworks for scenario-based programs allow scenarios to specify their view of what the system
must, may, or must not do only through very strict interfaces. This limits the methodology’s expressive power
and often prevents users from modeling certain complex requirements. Here, we propose to extend Scenario-
Based Programming’s execution mechanism to allow scenarios to specify how the system should behave using
rich logical constraints. We then leverage modern constraint solvers (such as SAT or SMT solvers) to resolve
these constraints at every step of running the system, towards yielding the desired overall system behavior. We
provide an implementation of our approach and demonstrate its applicability to various systems that could not
be easily modeled in an executable manner by existing Scenario-Based approaches.
1 INTRODUCTION
Modeling complex systems is a difficult and error-
prone task. The emerging Scenario-Based Program-
ming approach (SBP) (Damm and Harel, 2001; Harel
and Marelly, 2003; Harel et al., 2012b) aims to miti-
gate this difficulty. The key notion underlying SBP is
modeling through the specification of scenarios, each
of which represents a certain aspect of the system’s
behavior. These scenarios may describe either desir-
able behaviors that the system should strive to uphold,
or undesirable behaviors that the system should try to
avoid. The models produced in SBP are fully exe-
cutable: when composed together according to cer-
tain underlying semantics, the scenarios yield cohe-
sive system behavior.
The SBP approach has been implemented in
dedicated frameworks such as the Play-Engine and
PlayGo for the visual language of Live Sequence
Charts (LSC) language (Harel and Marelly, 2003;
Harel et al., 2010a) or ScenarioTools (Greenyer et al.,
2017) for the Scenario Modeling Langauge (SML)
textual language. Further, SBP has been implemented
on top of several standard programming languages,
such as Java (Harel et al., 2010b), C++ (Harel and
Katz, 2014), and JavsScript (Bar-Sinai et al., 2018),
and was amalgamated with the Statecharts visual for-
malism (Marron et al., 2018)
SBP has been successfully used in modeling com-
plex systems, such as web-servers (Harel and Katz,
2014), cache coherence protocols (Harel et al., 2016),
robotic controllers (Gritzner and Greenyer, 2018), and
as part of the Wise Computing effort aimed at turning
computers into proactive members of system devel-
opment teams (Harel et al., 2018).
Despite the diversified adaptations of SBP for
various programming languages and for various use
cases, a common theme remains: in all existing
frameworks, scenarios are interwoven using a very
basic mechanism. Specifically, during execution the
scenarios are synchronized at predetermined points,
and at every synchronization point each scenario de-
clares a set of events it would like to see triggered,
and a set of events it forbids from being triggered.
The execution framework then selects for triggering
one event that is requested by at least one scenario
and is not blocked by any of the scenarios. The event
is broadcast to all scenarios, and the execution con-
tinues until the next synchronization point is reached.
An example appears in Fig. 1.
Katz, G., Marron, A., Sadon, A. and Weiss, G.
On-the-Fly Construction of Composite Events in Scenario-Based Modeling using Constraint Solvers.
DOI: 10.5220/0007573801410154
In Proceedings of the 7th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2019), pages 141-154
ISBN: 978-989-758-358-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
141
wait for
WATERLOW
request
ADDHOT
request
ADDHOT
request
ADDHOT
ADDHOTWATER
wait for
WATERLOW
request
ADDCOLD
request
ADDCOLD
request
ADDCOLD
ADDCOLDWATER
wait for
ADDHOT
while
blocking
ADDCOLD
wait for
ADDCOLD
while
blocking
ADDHOT
STABILITY
···
WATERLOW
ADDHOT
ADDCOLD
ADDHOT
ADDCOLD
ADDHOT
ADDCOLD
···
EVENT LOG
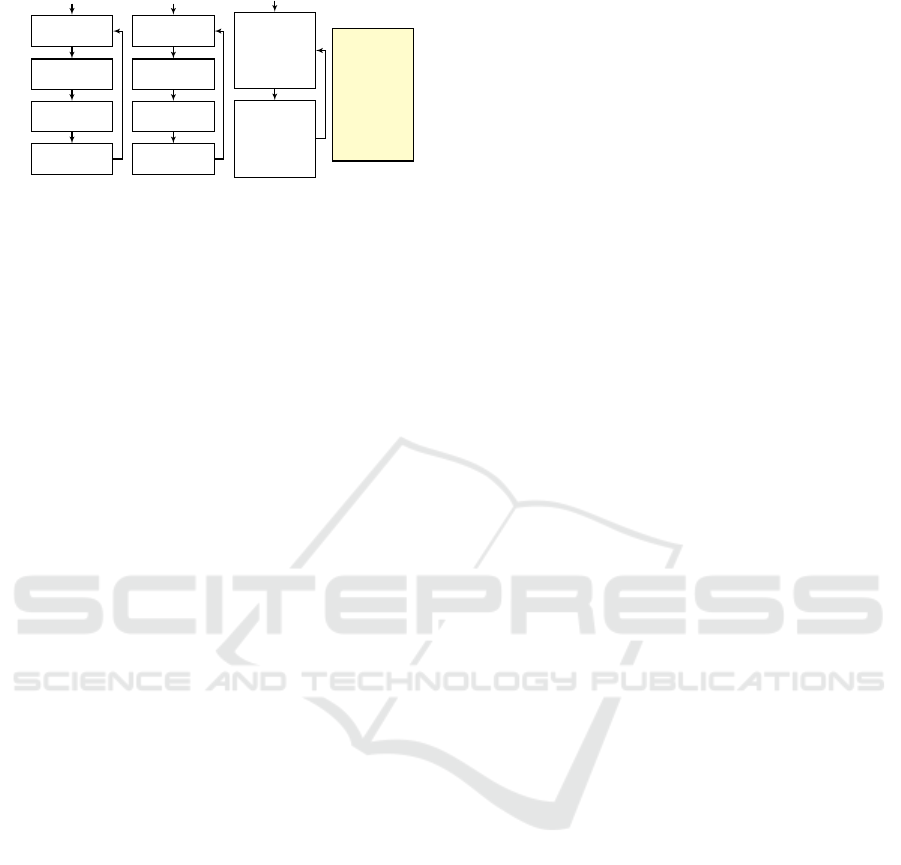
Figure 1: (From (Harel et al., 2014)) A scenario-based
model of a system that controls the water level in a tank
with hot and cold water taps. Each scenario object is de-
picted as a transition system, where the nodes represent the
predetermined synchronization points. The scenario object
ADDHOTWATER repeatedly waits for WATERLOW events
and requests three times the event ADDHOT; and the sce-
nario object ADDCOLDWATER performs a symmetrical op-
eration with cold water. In a model that includes only the
objects ADDHOTWATER and ADDCOLDWATER, the three
ADDHOT events and three ADDCOLD events may be trig-
gered in any order during execution. In order to maintain
the stability of the water temperature in the tank, the sce-
nario object STABILITY enforces the interleaving of AD-
DHOT and ADDCOLD events by using event blocking. The
execution trace of the resulting model appears in the event
log.
It has been suggested that some of the benefits of
SBP come from this basic event selection semantics.
In particular, the event selection mechanism is suf-
ficiently simple to make scenario-based models easy
to analyze automatically using formal compositional
techniques (Harel et al., 2013; Harel et al., 2015c;
Harel et al., 2016; Greenyer and Gritzner, 2018), and
even to automatically distribute, repair and synthesize
them (Harel et al., 2012a; Harel et al., 2015a; Stein-
berg et al., 2015; Greenyer et al., 2016b; Greenyer
et al., 2016a), primarily because it facilitates the au-
tomatic composition of individual scenarios that are
simple and succinct (Harel et al., 2015b). Still, the
simplicity of the event selection mechanism seems to
be a limiting factor in some cases — requiring cum-
bersome workarounds to associate complex behaviors
with simple events, and at times even preventing the
use of SBP for modeling a particular system alto-
gether.
Consider, as a toy example, a model for an au-
tonomous drone. The model contains various behav-
ioral scenarios for modeling the drone’s horizontal
and vertical movement. At every execution cycle of
the model, independent actions may be triggered for
each of the axes — climb, descend, or maintain height
for the vertical axis, and turn right, turn left or main-
tain direction for the horizontal axis. Further, climb
or descend actions are parameterized by a numeri-
cal value indicating the angular velocity of the climb
or descent; and similarly, turn right or turn left ac-
tions are parameterized by the angular velocity of the
turn. It is unclear how to express such a model in
SBP. For example, because the traditional event se-
lection mechanisms stipulates that precisely one ac-
tion be triggered in every cycle, how shall we express
the fact that multiple actions (horizontal and vertical)
may be triggered in the same cycle? And how shall
we account for the infinitely-many numerical parame-
ters for ascent, decent and turning actions? Some dis-
cretization schemes may be proposed, but this seems
to go against the grain of SBP — which aims at cre-
ating simple and intuitive scenario objects.
In this paper, we propose an extension to SBP that
utilizes constraint solvers: automated tools that take
as input a set of variables and certain kinds of con-
straints on these variables, and return a variable as-
signment that satisfies the given constraints (or in-
dicate that no such assignment exists). Automated
solvers have become widespread and highly success-
ful in the last decades, particularly in tasks related
to program analysis and verification (Clarke et al.,
2018). Here, we propose to use such solvers on-the-
fly, as part of the execution mechanism of scenario-
based models. Specifically, we propose to augment
SBP such that in each synchronization point, each
scenario contributes to the creation of a formula that
is fed into the constraint solver — and the assignment
(of all variables) which is returned by the solver as-
sumes the role of the event selected for triggering.
Further, the very act of selecting simple events from
some set is extended into constructing, or computing
complex events based on rich specifications. This al-
lows us to specify scenarios that interact using a far
richer formalism, and can thus model more complex
systems. Compared to existing SBP approaches, this
allows for the scenarios to collaboratively construct
the events, not only choose among events that each
propose.
In particular, using constraint solvers in this fash-
ion allows us to seamlessly model the autonomous
drone system: the constraints produced in every syn-
chronization point may include multiple variables in-
dicating multiple actions; and these constraints may
include arbitrary numerical values, indicating, e.g.,
the various angular velocity parameters. We elaborate
on this example later on.
In this work we describe how a solver-based SBP
modeling framework can be implemented, focusing
mainly on the semantics but also propose a syntax,
with accompanying implementation details and ex-
amples for completeness.
The paper is organized as follows. In Section 2
we provide some necessary background on SBP and
on constraint solvers. In Section 3 we propose our
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
142

extension to SBP that allows modelers to integrate it
with constraints solvers, followed by illustrative ex-
amples. In Section 4 we describe an evaluation of our
approach, followed by a discussion of related work in
Section 5. We conclude in Section 6.
2 BACKGROUND
2.1 Scenario-Based Modeling
Before we discuss our proposed extensions to SBP,
we begin by recapping the existing, commonly used
formulation and semantics. Formally, a scenario-
based model consists of independent scenario objects
that are interwoven at run time. Each scenario re-
peatedly declares sets of events which, from its own
perspective, should, may, or must not occur. At run-
time, the scenarios are executed simultaneously and
are synchronized by a mechanism responsible for se-
lecting events that constitute the integrated system be-
havior. The scenarios never interact with each other
directly; all interactions are carried out through the
event selection mechanism.
Following the definitions in (Katz, 2013), we de-
fine a scenario object O over event set E as the tuple
O = hQ,δ,q
0
,R,Bi, where the components are inter-
preted as follows:
• Q is a set of states, each representing one of the
predetermined synchronization points;
• q
0
is the initial state;
• R : Q → 2
E
and B : Q → 2
E
map states to the sets
of events requested and blocked at these states (re-
spectively); and
• δ : Q × E → 2
Q
is a transition function, indicating
how the object reacts when an event is triggered.
Scenario objects can be composed, in the follow-
ing manner. For objects O
1
= hQ
1
,δ
1
,q
1
0
,R
1
,B
1
i and
O
2
= hQ
2
,δ
2
,q
2
0
,R
2
,B
2
i over a common event set
E, the composite scenario object O
1
k O
2
is defined
by O
1
k O
2
= hQ
1
× Q
2
,δ,hq
1
0
,q
2
0
i,R
1
∪ R
2
,B
1
∪ B
2
i,
where:
• h ˜q
1
, ˜q
2
i ∈ δ(hq
1
,q
2
i,e) if and only if ˜q
1
∈
δ
1
(q
1
,e) and ˜q
2
∈ δ
2
(q
2
,e); and
• The union of the labeling functions is defined in
the natural way; e.g. e ∈ (R
1
∪ R
2
)(hq
1
,q
2
i) if
and only if e ∈ R
1
(q
1
) ∪ R
2
(q
2
), and e ∈ (B
1
∪
B
2
)(hq
1
,q
2
i) if and only if e ∈ B
1
(q
1
) ∪ B
2
(q
2
).
A behavioral model M is simply a collection of
scenario objects O
1
,O
2
,...,O
n
, and the executions of
M are the executions of the composite object O = O
1
k
O
2
k ... k O
n
. Each such execution starts from the
initial state of O, and in each state q along the run an
enabled event is chosen for triggering, if one exists
(i.e., an event e ∈ R(q) − B(q)). Then, the execution
moves to state ˜q ∈ δ(q,e), and so on.
2.2 Constraint Solvers
As our proposed extensions to SBP rely heavily on
automated constraint solvers, we give here a very
brief introduction to some of these tools (and men-
tion sources of information for additional reading).
Broadly speaking, constraint solvers are automated
tools that take as input a set of constraints given as
a formula ϕ over a set of variables V , and either (i)
return a variable assignment that satisfies ϕ, or (ii) an-
swer that no such variable assignment exists. (A sat-
isfying assignment is usually called a model, but we
will refrain from using that term as to not overload it).
Different solvers differ in the kinds of constraints they
allow as part of their input, and many popular solvers
operate on constraints given in restricted forms of first
order logic. The performance of these solvers (and the
complexity of the problems they solve) also closely
depends on the inputs they allow.
In this paper, we will focus on three kinds of au-
tomated solvers:
Boolean Satisfiability (SAT) Solvers. These are
solvers that operate on a set V of Boolean variables,
and limit the constraint formula ϕ to be a quantifier-
free propositional formula over the variables of V .
The solver then attempts to find a Boolean assignment
that satisfies ϕ. For example, for V = {p,q}, the for-
mula ϕ
1
= (p ∨ q) ∧ (p ∨ ¬q) is satisfiable, and one
satisfying assignment is p,¬q; whereas the formula
ϕ
2
= (¬p ∨ ¬q) ∧ p ∧ q is unsatisfiable. Although the
Boolean satisfiability problem is NP-complete, there
exist many mature tools that can solve instances with
hundreds of thousands of variables (Nadel, 2009).
A particular kind of SAT solvers, called MaxSAT
solvers, attempt to find a Boolean assignment that sat-
isfies as many of the input constraints as possible (and
not necessarily all of the constraints).
Linear Programming (LP) Solvers. LP solvers
operate on a set V of rational variables, and the con-
straint formula ϕ is a conjunction of linear constraints,
often referred to as a linear program. For example, for
the variables V = {x,y,z}, the constraint ϕ
3
= (x ≤
5) ∧ (x + y ≤ z) is satisfiable, whereas the constraint
ϕ
4
= (x ≤ 5) ∧ (y ≤ 2) ∧ (x + y ≥ 20) is unsatisfiable.
LP is known to be solvable in polynomial time, al-
though many solvers use worst-case exponential al-
gorithms that turn out to be more efficient in prac-
tice (Chv
´
atal, 1983).
On-the-Fly Construction of Composite Events in Scenario-Based Modeling using Constraint Solvers
143

Satisfiability Modulo Theories (SMT) Solvers.
These solvers can be regarded as generalized SAT
solvers, capable of handling formulas in rich frag-
ments of first order logic. The satisfiability of the for-
mulas is checked modulo background theories, which
intuitively restrict the search only to satisfying assign-
ments that “make sense” according to these certain
theories. For example, considering the theory of ar-
rays of integer elements with variable set V = {a,b},
the formula ϕ
5
= (a[3] ≥ b[5]) ∧ (a[4] ≤ b[0]) is sat-
isfiable, whereas the formula ϕ
6
= (a = b) ∧ (a[4] 6=
b[4]) is unsatisfiable. Modern SMT solvers support
many theories of interest, including various arithmetic
theories, the theory of uninterpreted functions, and
theories of arrays, of sets, of strings, and others (Bar-
rett and Tinelli, 2018). Further, these background the-
ories can be combined: for example, one can define
formulas that includes arrays of integers or sets of
strings, etc. The SMT problem is, in general, unde-
cidable, although certain background theories afford
efficient decision procedures.
The three kinds of solvers are used for different
tasks, and all are highly successful. Many mature
tools exist, and a great deal of research is being put
into improving them further.
3 INTEGRATING SBP WITH
CONSTRAINT SOLVERS
3.1 Extending SBP
The notion underlying our proposed extension of SBP
is as follows. At each synchronization point, instead
of declaring sets of requested and blocked events,
each scenario object O
i
can instead declare a set
of constraint formulas Φ = {ϕ
1
i
,...,ϕ
l
i
} that are in-
tended as guiding rules for a solver-based mecha-
nisms that assembles the events. These constraint for-
mulas are labeled by a labeling function L
i
, which
takes a formula ϕ
k
i
and returns its labeling, i.e. a sub-
set of a finite set of predefined labels L . The motiva-
tion for these labels is that they can be used to assign
different semantics to different constraint formulas.
For example, going back to the drone system de-
scribed in the introduction, one scenario can specify
that the total speeds of the rotors must be above some
threshold and another scenario can suggest to increase
one of the rotors. The labeling function is a protocol
through which the execution mechanism knows that
the first is a “must” specification and the latter is a
“may” condition.
At each synchronization point, the execution
mechanism collects the sets of constraint formulas
Φ
1
,...,Φ
n
produced by the individual scenario ob-
jects, and combines them into a global constraint for-
mula ϕ. This formula is then passed into a constraint
solver, and the satisfying assignment returned by the
solver is broadcast to all scenarios, which can then
change their states. If no satisfying assignment is
found, the SBP model is deadlocked, and the execu-
tion terminates. (Another possible extension in case a
deadlock is discovered is to wait for an external event,
along the lines proposed in (Harel et al., 2011), but
this is beyond our scope here).
Formally, we modify the definitions of SBP to
support integration with constraint solvers as follows.
Let V denote a set of variables, and let L denote a
finite set of labels. We define a scenario object O
over V, L as a tuple O = hQ,δ,q
0
,C,Li , where Q is
a set of states and q
0
is the initial state, as before.
The function C, which replaces the labeling func-
tions R and B in the previous definition, takes a state
q ∈ Q as input and returns a set of constraint formulas
Φ = {ϕ
1
,...,ϕ
l
} over the variables of V . The func-
tion L returns a labeling of these constraint formulas
according to the current state, i.e. L : Q × ξ → 2
L
,
where ξ represents the set of all possible formulas.
By convention, we require that L(q,ϕ) =
/
0 for every
ϕ such that ϕ /∈ C(q). The transition function δ is
now defined as δ : Q×A(V ) → 2
Q
, where A(V ) is the
set of all possible assignments to the variables of V .
Intuitively, given a specific state q and a variable as-
signment α ∈ A(V ), invoking δ(q,α) returns the set
of states the object may transition into.
In order to account for the new constraint for-
mulas, we modify the composition operator for
scenario objects as follows: For objects O
1
=
hQ
1
,δ
1
,q
1
0
,C
1
,L
1
i and O
2
= hQ
2
,δ
2
,q
2
0
,C
2
,L
2
i over
a common variable set V and a common label set
L , the composite scenario object O
1
k O
2
is de-
fined by O
1
k O
2
= hQ
1
× Q
2
,δ,hq
1
0
,q
2
0
i,C,Li, where
h ˜q
1
, ˜q
2
i ∈ δ(hq
1
,q
2
i,α) if and only if ˜q
1
∈ δ
1
(q
1
,α)
and ˜q
2
∈ δ
2
(q
2
,α). The constraint-generating func-
tion C is defined as C(hq
1
,q
2
i) = C
1
(q
1
) ∪ C
2
(q
2
),
i.e. the constraints defined by the individual objects
are combined and become the constraints defined by
the composite object. We define L(hq
1
,q
2
i,ϕ) =
L
1
(q
1
,ϕ) ∪ L
2
(q
2
,ϕ) using again the convention that
L
i
(q
i
,ϕ) =
/
0 if ϕ /∈ C
i
(q
i
).
The key difference between our extended seman-
tics and the original is in the event selection mecha-
nism. As before, a behavioral model M is a collec-
tion of scenario objects O
1
,O
2
,...,O
n
, and the ex-
ecutions of M are the executions of the composite
object O = O
1
k O
2
k ... k O
n
. Each such execu-
tion starts from the initial state of O, and after each
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
144
state q along the run a variable assignment α is as-
sembled by invoking a constraint solver on a formula
ϕ constructed from C(q), according to the constraint
labeling L. Specifically, we assume that the modeler
also provides a constraint composition rule ψ. Given
the constraint-generating function C and the labeling
function L, ψ dictates how to construct for every state
q the constraint formula ϕ that should be passed to
the solver, and/or how to treat the various constraints
altogether (e.g., apply priorities among scenarios, or
apply various optimization goals when multiple so-
lutions exist). The execution then moves to state
˜q ∈ δ(q, α), and so on.
3.2 Illustrative Examples
The aforementioned framework is general, and can be
customized in several ways through the constraint for-
mulas, their labeling, and the constraint composition
rule ψ. We next illustrate this using a few simple ex-
amples.
Traditional SBP Semantics. The traditional se-
mantics of SBP can be obtained as follows. We al-
low only two labels L = {r,b}, where r represents re-
quest constraints and b represents block constraints.
In addition, we define the variable set V to contain
precisely one variable, V = {e}, representing the trig-
gered event. Next, we syntactically restrict the con-
straint formulas ϕ
i
to be of the form e = c for some
constant c; and finally, for any state q we define the
constraint composition rule to be:
ψ(q,C,L) = (
_
ϕ∈C(q) | r∈L(q,ϕ)
ϕ)∧(
^
ϕ∈C(q) | b∈L(q,ϕ)
¬ϕ)
Intuitively, at each state, each scenario object can de-
clare events it would like to see triggered (expressed
as constraints labeled r), and those it wants to prevent
from being triggered (expressed as constraints labeled
b). The constraint composition rule then translates
these individual constraints into a global formula rep-
resenting the fact that the triggered event needs to be
requested and not blocked (note that constraints la-
beled b are negated).
When using these particular restrictions, the
straightforward solver of choice is a SAT solver: since
the formula ϕ only contains propositional connectives
and the variable e can only take on a finite number of
values, we can encode these possible values using a
finite set of Boolean variables (this process is often
called bit-blasting). A modern SAT solver can then
be used for selecting the triggered event very quickly
— in a way that is likely to enable an execution that
is sufficiently fast for many application domains.
Autonomous Drone. The general framework we
proposed in the previous subsection can be used to
model complex interactions, which are either beyond
the reach of the traditional semantics, or at least re-
quire a great deal of effort on the modeler’s side. Let
us return to our toy aircraft example: a drone capa-
ble of simultaneous vertical and horizontal maneu-
vers. Using our extended modeling framework, we
can define our variable set V to include two variables,
V = {v, h}, where v represents the vertical angular ve-
locity and h represents the horizontal angular veloc-
ity. One scenario object can be used for setting up-
per and lower bounds on the vertical turning angular
velocities, due to the drone’s mechanical limitations
(see Fig. 2), and another can be used for limiting the
horizontal turning angular velocity (see Fig. 3). In
this case we require no labeling of the constraint, i.e.
L =
/
0, and the constraint composition rule ψ is a sim-
ply a conjunction of all the individual constraints.
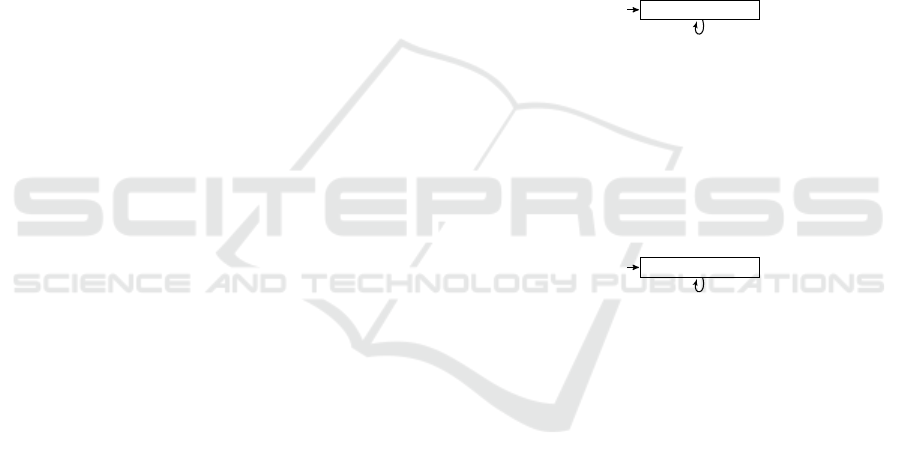
ϕ
1
= −5 ≤ v ≤ 5
true
Figure 2: A scenario object that puts hard limits on the ver-
tical turning angular velocity of the drone. The scenario has
a single synchronization point (indicated by a single state),
in which it contributes ϕ
1
= −5 ≤ v ≤ 5 to the global con-
straint set. The only transition, a self loop that does not
depend on the variable assignment returned by the solver,
indicates that the scenario continues to contribute this con-
straint, regardless of the satisfying assignment discovered
by the solver.
ϕ
2
= −10 ≤ h ≤ 10
true
Figure 3: A scenario object that puts hard limits on the hor-
izontal turning angular velocity of the drone.
Without any additional limitations, i.e. if only
these two scenarios existed in the system, the con-
straint formula in any synchronization point would
be ϕ = ϕ
1
∧ ϕ
2
= (−5 ≤ v ≤ 5) ∧ (−10 ≤ h ≤ 10).
Because the constraint are arithmetical, linear con-
straints, we can use an LP solver to dispatch them;
and indeed, in this case an LP solver will return an
assignment such as v = 3, h = 0. Other objects in the
system, called actuators, may then process these val-
ues and adjust the drone’s engines accordingly.
Let us now consider a particular flight situation.
Suppose another object is in charge of navigating the
drone to its destination, and that that object is request-
ing a right turn at an angular velocity of at least 6 de-
grees per second: ϕ
3
= h ≥ 6. Further suppose that
a sensor has detected an electrical wire up ahead, and
in order to circumvent it is requesting either that the
elevation be increased, or that a left turn be initiated:
ϕ
4
= h ≤ −3 ∨ v ≥ 2. In that case, when the solver
is given the global constraint formula ϕ = ∧
4
i=1
ϕ
i
, a
On-the-Fly Construction of Composite Events in Scenario-Based Modeling using Constraint Solvers
145
possible solution is h = 8, v = 3 — which satisfies all
constraints, by both turning right and increasing the
drone’s altitude.
Dependency Management. So far, we have seen
two examples for constraint composition rules ψ:
when simulating the traditional SBP event selection
mechanism, we labeled individual constraints as re-
quest or block statements, and then composed them
accordingly; and in the drone example, we had no
labeling, and ψ was a simple conjunction. We now
demonstrate a situation in which yet another compo-
sition rule is useful.
Consider a system in charge of installing software
packages on a computer, similar to the standard pack-
age managers that ship with modern Linux distribu-
tions. Software packages have dependencies: for ex-
ample, installing package A might require that pack-
age B already be installed, in which case we say that
package A requires package B. Some packages may
also be incompatible with other packages: for exam-
ple, if package A is incompatible with package C, this
means that A cannot be installed alongside C. The
state of the system is the set of currently installed
software packages. Finally, the system is given a user-
supplied goal, such as “install A”. In order to achieve
the goal, the system needs to install A and any re-
quired packages, while removing the smallest number
of packages currently installed that A and its depen-
dencies are incompatible with. Of course, deciding
which packages to install and which to remove in or-
der to achieve an optimal result is a complex task.
To model this system using our extended version
of SBP, we can utilize a specific kind of SAT solver,
called a MaxSAT solver. A MaxSAT input formula
consists of subformulas labeled either hard or soft,
and the solver finds an assignment that satisfies the
hard constraints, and as many of the soft constraints
as possible. MaxSAT solvers play a crucial role in our
model, in the following way: for each package depen-
dency, we will introduce a scenario object that adds a
hard constraint that represents the dependency; and
we will introduce other scenario objects that express
the currently-installed packages as soft constraints.
That way, the MaxSAT solver will give us back an
assignment that indicates which packages should be
installed and which should be removed, in a way that
guarantees that the goal package is installed while the
number of previously installed packages that need to
be removed is minimized (Mancinelli et al., 2006;
Argelich and Lynce, 2008).
More specifically, our model for the package de-
pendency system is constructed as follows. The vari-
able set V consists of a Boolean variable for each
software package, e.g. {x
A
,x
B
,x
C
,...}, that signifies
whether the package is installed (variable is true) or
not installed (variable is false). A change in the vari-
able’s value indicates that the package should be in-
stalled or removed. Our label set is ={h, s}, indicat-
ing whether a constraint is hard or soft, respectively.
Each dependency is represented by a dedicated ob-
ject; for example, the requirement “A requires B” is
encoded by the scenario object in Fig. 4. Other ob-
jects are used for encoding the soft constraints repre-
senting the currently installed packages—an example
appears in Fig. 5.
ϕ
h
A
= (¬x
A
∨ x
B
)
true
Figure 4: A scenario object that encodes the fact the in-
stalling A requires B. Observe that the constraint is labeled
as hard, to indicate that it must never be violated.
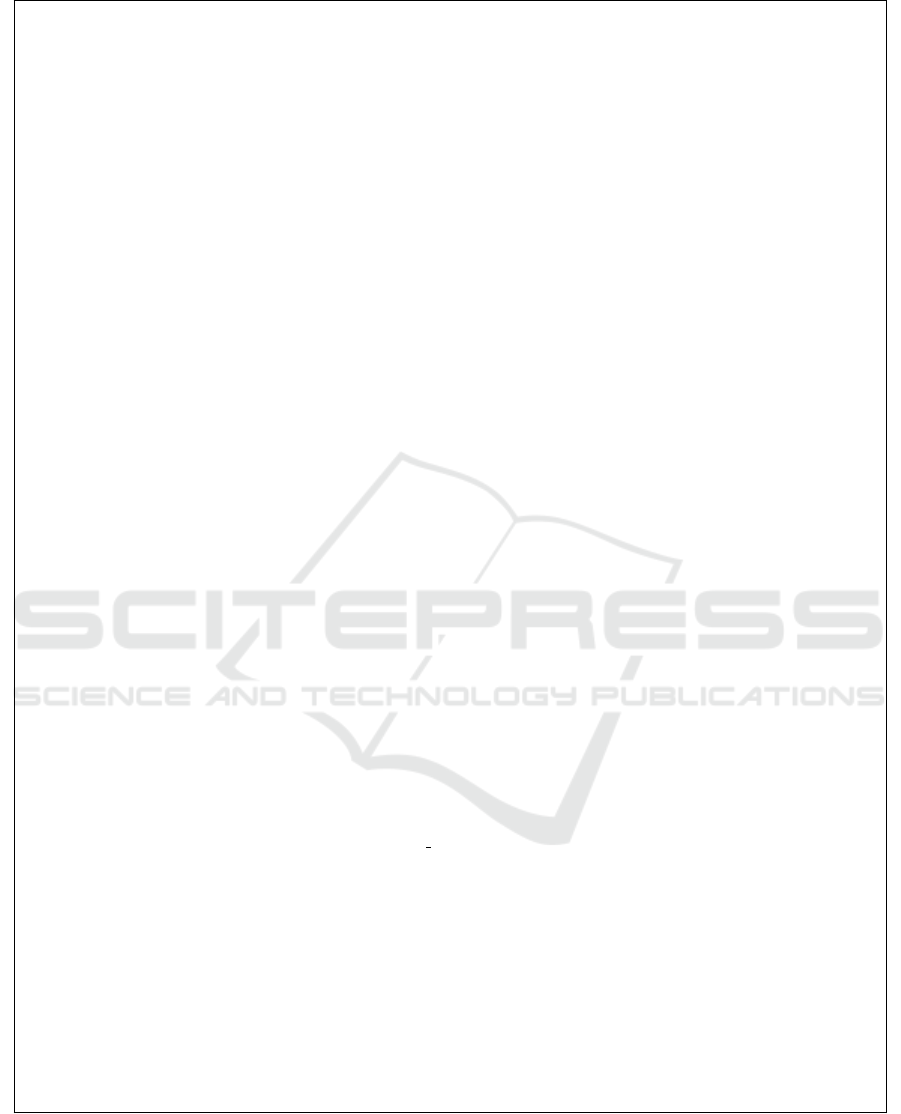
ϕ
s
B
= x
B
ϕ =
/
0
x
B
¬x
B
¬x
B
x
B
Figure 5: A scenario object that adds x
B
as a soft con-
straint if package B is currently installed (left state), and
contributes no constraints if it is not installed (right state).
Switching between the states is performed according to the
assignment discovered by the solver — specifically, it de-
pends on whether x
B
is assigned to true or not. We assume
the package is initially installed.
To avoid clutter, we omit the scenario object in
charge of reading the installation goal from the user,
and the scenario objects of the actuators in charge
of monitoring changes in consecutive variable assign-
ments and translating these changes into the installa-
tion or removal of packages.
4 IMPLEMENTATION AND
EVALUATION
In this section we evaluate the applicability of our ap-
proach by discussing its implementation, and by ap-
plying it to more complex problems.
4.1 Two Implementations
We developed a proof-of-concept implementation of
our approach in two platforms. The first uses MAT-
LAB/Simulink. Scenario objects generate their con-
straints as strings. These strings are then passed into
MATLAB solve, the equation and system solver.
The solution yielded by the solver is then translated
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
146

into variable values that control classical Simulink-
driven behavior. The results of this behavior are also
fed back into the scenarios, which can then change the
constraints they present.
Below, we describe in detail a second im-
plementation, based on Python and the Z3 SMT
solver (De Moura and Bjorner, 2008). The framework
enables users to create fully-executable models using
the aforementioned approach, and then run them and
analyze the output. We plan to make the framework
available online in the near future, and also intend to
extend it; see some discussion in Section 6.
We began by implementing the basic SBP seman-
tics in our framework. For these semantics, the set
of allowed labels is L = {may,must,wait-for}: the
may label represents requested events, the must label
is used here to block the complement of the specified
event set, and the wait-for label is merely syntactic
sugar used to simplify defining the transition relation.
This labeling scheme uses the composition rule
ψ(q,C,L) =
(
_
ϕ∈C(q) | may∈L(q,ϕ)
ϕ) ∧ (
^
ϕ∈C(q) | must∈L(q,ϕ)
ϕ)
For the event selection mechanism, we apply the Z3
solver for solving the formula ϕ, constructed from the
scenario objects’ may and must constraints as speci-
fied above.
In our implementation, each scenario object is
modeled using a Python generator: a function that
can pause itself and yield control at any point, and
then be subsequently resumed when it is re-invoked
with the language’s next() idiom. This functionality
of Python allows us to implement the SBP idioms —
i.e., have the scenario objects pause at synchroniza-
tion points and be resumed when a satisfying assign-
ment for the variables of V has been found.
At each synchronization point, the scenario object
thus yields control, and passes to the event selection
mechanism a Python dictionary containing any sub-
set of the keys may, must, and wait-for, where each
such key is associated with a Z3 constraint.
The core of the code of the execution mechanism
appears in Fig. 6. The main function, run, takes as in-
put the set of scenario objects, and then executes the
model that is obtained by composing these objects.
Specifically, the function invokes the scenario objects,
one at a time, and waits for each of them to reach
its next synchronization point, indicated by a yield
statement. Once all scenario objects are synchro-
nized, the framework collects the constraints (in the
form of dictionaries, called tickets in the code) gen-
erated by the individual scenarios. These constraints
are then composed and passed on to Z3, which tries to
find an assignment that satisfies all the must and may
constraints. If such an assignment is found, the execu-
tion framework wakes up the scenario objects whose
wait-for conditions are satisfied by the chosen as-
signment, and allows them to resume. They then con-
tinue to execute until they reach the next yield point,
and then the process is repeated again, possibly ad in-
finitum.
4.2 Examples
Hot-Cold Example. Using this framework, one can
specify the scenario objects from the water tank sys-
tem that appears in Fig. 1. This specification appears
in Fig. 7. When the scenario objects defined therein
are executed, the satisfying assignments obtained by
the solver during the execution alternate between as-
signing “hot” to true and “cold” to false, and vice
versa.
Consider now a situation where the customer de-
cides to change the requirements for the system. For
example, assume that the last requirement (that does
not allow to add two doses of the same type in a row)
is removed and, instead, the customer decides to add
the requirements modeled in Fig. 8. The scenarios
listed in the figure are then added instead of the last
scenario in Fig. 7.
Note that the new requirements involve a new
solver variable called “temp”, for temperature, that
the new scenarios control. Note also that this is done
without changing anything in the remaining scenarios
and that the remaining scenarios are not at all aware
of the new variable.
This example raises the following discussion:
consider, for example, the situation in Fig. 9 where,
as in the water tap example, two scenarios deal with
separate variables called x
1
and x
2
, respectively. Since
the first scenario is not aware of the second one, it as-
sumes that the only may constraint for x
1
is that it is
greater than 50 — and so it does not expect the solver
to allow an assignment to x
1
that is smaller than 50.
According to our semantics, however, the composi-
tion rules produces the constraint ψ = x
1
> 50 ∨ x
2
>
50 to which the assignment {x
1
= 0,x
2
= 51} is valid.
A way to avoid this unintended behavior can be to la-
bel each proposition with the variable that it is aware
of and to solve for each set of variables separately.
Another way to avoid it can be to look for assignments
that maximize the number of satisfied may constraints,
e.g by using solvers that optimize the number of sat-
isfied clauses.
Leader Follower Benchmark Example. As a
more complex example, we used the extended SBP
modeling framework, with the composition rule de-
On-the-Fly Construction of Composite Events in Scenario-Based Modeling using Constraint Solvers
147
def run ( scenarios):
global m # A variable where the solved model is published
tickets = [] # A list containing the tickets issued by the scenarios
# Run all scenario objects to their initial yield
for sc in scenarios :
ticket = next(sc) # Run the scenario to its first yield and collect the ticket
ticket [’sc’] = sc # Maintain a pointer to the scenario in the ticket
tickets.append ( ticket ) # Add the ticket to the list of tickets
# Main loop
while True :
# Compute a disjunction of may constraints and a conjunction of must constraints
(may , must ) = (False , True )
for ticket in tickets:
if ’may ’ in ticket:
may = Or (may , ticket [’ may’] )
if ’must ’ in ticket:
must = And(must , ticket [ ’must ’])
# Compute a satisfying assignment and break if it does not exist
sl = Solver ()
sl.add ( And(m ay , must ))
if sl. check() == sat :
m = sl. model ()
else:
break
# Reset the list of tickets before rebuilding it
oldTickets = tickets
tickets = []
# Run the scenarios to their next yield and collect new tickets
for oldTicket in oldTickets :
# Check whether the scenario waited for the computed assignment
if ’wait−for ’ in oldTicket and is tru e (m.eval( oldTicket [ ’wait−for’])):
# Run the scenario to the next yield and collect its new ticket
newTicket = next(oldTicket[’sc ’], ’ended ’)
# Add the new ticket to the list of tickets ( if the scenario didn ’t end)
if not newTicket == ’ended’:
newTicket[’sc’] = oldTicket [ ’sc ’] # Copy the pointer to the scenario
tickets.append ( newTicket )
else:
# Copy the old tickets to the new list
tickets.append ( oldTicket )
Figure 6: A python implementation of an extended SBP framework. The scenarios are assumed to be given as an array of
generators that return, using the yield command, labeled Z3 propositions expressed as dictionaries with keys that are subsets
of {may, must, wait-for}. In this code these dictionaries are called “tickets”.
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
148
hot = Bool ( ’hot’)
cold = Bool(’ cold ’)
def mutual ex clusion ():
yield {’must’: Or(Not ( hot),Not( cold))}
def t hree hot ():
for i in range (3):
yield {’may ’: hot , ’wait−for’: hot}
def t hree c old ():
for j in range (3):
yield {’may ’: cold , ’w ait−for’: cold}
def n o t wo s a m e in a r o w ():
yield {’wait−for ’: true}
while True :
if is tru e (m[cold ]):
yield {’must’:Not(cold ),’wai t−for’: true}
if is tru e (m[hot]):
yield {’must’:Not(hot),’wait−for ’:true}
Figure 7: A simple example of a model that uses the solver-
based execution mechanism. The model sets the “hot” and
“cold” flags, indicating that additional doses of hot and cold
water are added to a tank, according to the following five
rules: (1) do not add hot and cold doses at the same time;
(2) add three doses of hot water; (3) add three doses of cold
water; (4) never add two doses of the same type in a row.
scribed in preceding sub-section, to model a reac-
tive controller for a rover in a leader-follower sim-
ulation. In a leader-follower system, a controlled
follower rover tracks a leader rover. The follower
rover is required to follow the leader, while al-
ways staying at a safe distance from it, no mat-
ter how the leader behaves (assuming reasonable
bounds on speed and turn angles). This problem
served as a challenge problem in the MDETOOLS’18
workshop, where the organizers supplied a simula-
tion software for it. Participants of the workshop
were encouraged to demonstrate their various mod-
eling approaches by constructing software to con-
trol the follower rover (see mdetools.github.io/
mdetools18/challengeproblem.html).
The simulator provided in the MDETOOLS’18
challenge periodically emits the location of the rovers,
the distance between the rovers, and the heading angle
of the follower (compass). The follower rover can be
controlled by setting the power for the left and right
wheels in the range {−100,...,100}. For example, if
power to the left wheels is set to 40 and power to the
right wheels is set to 0, the rover will turn right.
The code for the scenarios that we created in or-
temp = Real(’ temp ’)
def h ot temp ():
yield {’must’: Implies(hot , temp > 50)}
def c old te mp ():
yield {’must’: Implies(cold , temp < 50)}
def after hot temp ():
while True :
yield {’wait−for ’: hot}
while is tru e (m[hot ]):
yield {’must’:temp>20,’wait−for’: true}
def after col d tem p ():
while True :
yield {’wait−for ’: cold}
while is tru e (m[cold ]):
yield {’must’: temp<80,’wait−for’: true}
Figure 8: New requirements for the water tap model: (1) the
temperature of a hot event must be above 50; (2) the temper-
ature of a cold event must be below 50; (3) the temperature
of an event that follows a hot event must be above 20; (4)
the temperature of an event that follows a cold event must
be below 80.
def scenario1 ():
yield {’may ’: x
1
> 50}
def scenario2 ():
yield {’may ’: x
2
> 50}
Figure 9: An example of an unintended behavior with the
may and must semantics. Since ψ = (x
1
<50)∨(x
2
>50), the
assignment {x
1
= 0, x
2
= 51} is valid despite the fact that
no scenario specified that x
1
may be smaller than 50. To fix
this issue, we propose to change the composition rule so that
each set of variables and constraints is solved separately.
der to control the follower rover is listed in Fig.10.
The first scenario specifies the bounds for the pR and
pL variables, indicating the power to the right and left
wheels, respectively. The second scenario specifies
forward and backward motion, where wheel power
is a function of the relative distance, i.e., when the
rovers get too far apart or too close, the follower grad-
ually increases or decreases power to the wheels, even
down to negative values. The third scenario specifies
how the follower is steered towards the leader loca-
tion. When the relative angle (calculated from the
data emitted from the simulator) exceeds a specified
value (3 degrees), the follower will accordingly turn
left or right towards the leader. The last scenario spec-
ifies how to perform a turn by setting different power
On-the-Fly Construction of Composite Events in Scenario-Based Modeling using Constraint Solvers
149

levels to the left and right wheels (note, however, that
this scenario does not trigger a turn — but rather con-
trols a turn that has been triggered by another sce-
nario). This example demonstrates the modularity of
the suggested approach and the ability to construct
complex behaviors using distinct behavioral aspects.
The final behavior yielded in this case study is in-
deed very similar to the one yielded by the traditional
behavioral programming approach where events are
selected without a constraint solver, using direct fil-
tering logic, which had been presented in (Greenyer
et al., 2018). The main difference between the tech-
niques used in these two implementations is that in the
implementation described in (Greenyer et al., 2018)
scenarios can only request finite sets of events while
here the spin() scenario, for example, specifies in-
finitely many options that may happen. This allows,
as demonstrated by the turnpowers() scenario, to break
the specification to better align with the requirements.
A Patrol Vehicle. Another example, described
briefly to fit space constraints, was implemented in
MATLAB/Simulink and associated solvers with the
tool described earlier in this section. It is a simula-
tion of an autonomous vehicle that moves repeatedly
in a fixed route in the shape a figure eight. The main
scenarios reflect the following requirements: (1) The
vehicle should always attempt to accelerate to a maxi-
mum prespecified speed; (2) when the vehicle reaches
a sharp curve, it should reduce its speed below a spec-
ified value until exiting the curve; and (3) after driv-
ing at a speed that is higher than a certain value, for a
length of time that is higher than some threshold, the
vehicle must reduce its allowed speed and accelera-
tion to some other values for a certain amount of time
(e.g., to avoid engine overheating).
This example illustrates and emphasizes the
power of scenarios as “stories” that progress from one
state to another and present different constraints at
different times and states. E.g., specifying the speed
constraints that hold only after detecting the arrival at
(or departure from) a sharp curve, or the passage of a
certain amount of time, appears more intuitive, and
is better aligned with the stated requirements, than
specifying ever-present constraints with conjunctions
of conditions, of, say, current speed and road curva-
ture, or, current speed and acceleration and the time
that has passed since certain events in the past.
5 RELATED WORK
The paper presents a particular approach to run-time
composition of behavior, namely, extending the ex-
isting SBP-style composition with specification and
solving of constraints. Below we briefly compare
SBP to other execution-time composition mechanism
with a special focus on the present context of con-
straint specifications (see (Harel et al., 2012b) for an
earlier, related analysis).
A key contribution of SBP over most other ap-
proaches to system specification is its succinctness
and intuitiveness. These properties emerge from the
ability to specify forbidden behavior explicitly and di-
rectly, rather than as control-flow conditions that pre-
vent certain pieces of code or specification from ac-
tually doing the undesired action (this was accom-
plished first with concrete lists of requested events
and filter-based blocking, and now, more generally,
with constraint solvers). For example, in SBP, one can
build, and sometimes even test, the specification that
a vehicle is not allowed to enter a road intersection
when the traffic light is red, before having coded how
vehicles behave. By comparison, other approaches,
like business-workflow engines, simulation engines,
and tools for test-driven development support intu-
itive specification of executable use cases and sce-
narios, but their support for generic composition of
multiple scenarios and anti-scenarios is limited. Or-
dinary procedural and object oriented programming,
functional programming and logic programming lan-
guages provide for composition of behaviors, but the
requirements scenarios and use cases are not directly
visible in the code and are reflected only in emergent
properties of the actual execution.
SBP principles have been implemented in several
languages in both distributed and centralized environ-
ments. These implementations also position SBP as
a design pattern for using common constructs like
semaphores, messaging, and threads, as well as con-
cepts such as agent-orientation for incrementally and
alignment of code with requirements.
Publish-subscribe mechanisms provide for
straightforward parallel composition, but without
language support for forbidden behavior. Aspect
oriented programming (AOP) (Kiczales et al., 1997)
supports specifying and executing cross-cutting
concerns on top of a base application, but does
not support specifying forbidden behavior, state
management within an aspect, or symmetry between
aspects and base code, which SBP does.
Behavior-based models such as Brooks’s sub-
sumption architecture (Brooks, 1986) Branicky’s be-
havioral programming (Branicky, 1999), and LEGO
Mindstorms leJOS (see review in (Arkin, 1998)), also
call for constructing systems from behaviors. SBP is
a language-independent formalism with multiple im-
plementations and extends in a variety of ways each of
the coordination and arbitration mechanisms in those
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
150

def bounds ():
yield {’must’: −MAX ≤ pL ≤ MAX ∧ −MAX ≤ pR ≤ MAX}
def forward backward ():
while True :
if dist > CLOSE :
if dist < FAR :
yield {’may ’: pL = pR =
MAX(dist−CLOSE)
FAR−CLOSE
, ’wait−for ’: true}
else:
yield {’may ’: pL = pR = MAX , ’wait−for ’: true}
else:
if dist > VERY CLOSE :
yield {’may ’: pL = pR =
MAX(dist−CLOSE)
CLOSE−V ERY CLOSE
, ’wait−for ’: true}
else:
yield {’may ’: pL = pR = −MAX , ’wait−for ’: true}
def spin ():
while True :
if abs( dir er ror ) > 3:
if dir e rror > 0:
yield {’may ’: pL > pR, ’must’: pL > pR, ’wait−for ’: true}
else:
yield {’may ’: pL < pR, ’must’: pL < pR, ’wait−for ’: true}
else:
yield {’wait−for ’: true}
def turnpowers ():
yield {’must’: pL 6= pR ⇒ (pL = 0 ∧ pR = 40) ∨ (pL = 40 ∧ pR = 0)}
Figure 10: Main scenarios of the leader-follower model. The first scenario specifies the bounds for the pR and pL variables,
which represent the power for the left and right follower wheels. The second specifies the follower forward and backwards
motion as a function of the distance from the leader. The third specifies how the follower is steered towards the leader location
as function of dir error, which represents the relative angle (in degrees). The last scenario specifies the turn powers.
architectures.
The execution semantics of behavioral program-
ming has similarities to the event-based scheduling
of SystemC (IEEE, 2006), which performs cyclical
co-routine scheduling by synchronization, evaluation,
update and notification. SBP differs from SystemC
in its direct support for specifying scenarios and anti-
scenarios with direct relation to the original require-
ments, where SystemC provides a particular archi-
tecture for composing parallel component in certain
architectures and designs. In SBP the synchroniza-
tion is an inherent technique for continuously comply-
ing with all constraints that the requirements impose
where in SystemC synchronization is used for coordi-
nation in an otherwise parallel component execution.
This also implies differences in the details in the se-
mantics of synchronization, event selection, queuing,
and state management within a parallel component.
The BIP language (behavior, interaction, prior-
ity) and the concept of glue for assembling compo-
nents (Bliudze and Sifakis, 2008) pursue goals simi-
lar to SBPs with a focus on correctness by construc-
tion rather than on execution of intuitively specified
behaviors and constraints, with run-time resolution of
these constraints.
As mentioned earlier, SBP was recently imple-
mented in the visual formalism of Statecharts. The
Yakindu Statecharts tool extended Statecharts’ origi-
nal support for orthogonal, concurrent and hierarchi-
cal state machines (Harel, 1987), with optional speci-
fication of requested and blocked events in any state,
and a corresponding enhancement to the event selec-
tion semantics (Marron et al., 2018). These enhance-
ments also provide the formal definitions of SBP prin-
ciples, which are based on state machines and tran-
sition systems (see, e.g., (Harel et al., 2010b)), with
a direct, concrete, executable implementation that is
also readily understood by humans. This facilitates
On-the-Fly Construction of Composite Events in Scenario-Based Modeling using Constraint Solvers
151

direct casting of inter-object behaviour, which usually
is only emergent when modeling with statecharts and
other state-machine languages, in the same language
and formalism as intra-object behaviour.
In SBP, direct execution and simulation of a model
is termed play-out. This is achieved by consulting
all constraints of the various scenarios before each
and every event selection. Thus, the complexity of
every runtime decision depends largely only on the
number of scenarios, and can ignore the number of
states in each scenario, and nondeterministic branch-
ing in future system and environment behavior. By
contrast, general program synthesis approaches for re-
active systems (see, e.g., (Bloem et al., 2012)) apply
model-checking, planning, and other techniques to-
ward resolving all specification constraints and envi-
ronment assumptions a-priori. This produces a strat-
egy (e.g., a deterministic finite automaton) for suc-
cessfully handling all possible environment behaviors
at all reachable program states. Synthesis has been
applied on SBP specifications with request-and-block
idioms in, e.g., (Harel and Segall, 2012).
One approach for dealing with the large size of
state graphs that general synthesis has to analyze, is
via run-time planning (also termed on-the-fly/online
synthesis) (see, e.g., (Blum and Furst, 1997)). In
run-time planning or synthesis, the execution mech-
anism considers a single starting state of the sys-
tem and the environment, and limits the number of
system and/or environment actions in the depth/hori-
zon of the search. This was implemented in SBP
in, e.g., smart play-out (Harel et al., 2002). An in-
teresting future research avenue is performing run-
time look-ahead or development-time total program
synthesis for SBP specifications containing rich con-
straints specification like the ones shown in this paper.
Such research may include identifying categories of
constraint specifications that are richer than lists and
filters, but are more amenable to synthesis than arbi-
trary constraints.
Our use of constraint solvers in direct control of
executing SBP specifications, is different from other
uses of these tools in analysis and verification of sys-
tems, including bounded model-checking (Biere et al.,
1999), symbolic execution (P
˘
as
˘
areanu and Visser,
2009), concolic testing (Sen, 2007), and others. SMT
solvers have been applied in such analysis tasks also
in the context of SBP; e.g., by enhancing SMT solvers
to deal more efficiently with transition systems (Katz
et al., 2015) and by using SMT solvers to efficiently
prove compositional properties of a collection of SBP
scenarios (Harel et al., 2013).
6 CONCLUSION
Scenario-based programming is a promising approach
for the design and modeling of complex systems, and
yet its applicability is somewhat hindered by the sim-
plistic way in which it interleaves scenario objects.
We proposed here a generalization of the approach
that lets objects interact in much more subtle and in-
tricate ways, and consequently allows SBP to faith-
fully model more complex systems. Our generaliza-
tion relies heavily on the use of automated constraint
solvers — tools that are capable of resolving the con-
straints imposed by the various scenarios and produce
a cohesive behavior. Apart from setting the theoretical
foundations for this extension, we developed a proof-
of-concept implementation and used it to demonstrate
the applicability of our approach.
In the future, we plan to continue this line of work
by developing support for model-checking, statisti-
cal analysis and synthesis algorithms for our extended
SBP. These tools exist already for traditional SBP, and
have proven useful — but extending them to our for-
mulation will entail accounting for the more flexible
event selection mechanism. We also intend to apply
our extended SBP to additional, larger case-studies.
REFERENCES
Argelich, J. and Lynce, I. (2008). CNF Instances from the
Software Package Installation Problem. In Proc. 15th
RCRA Workshop on Experimental Evaluation of Algo-
rithms for Solving Problems with Combinatorial Ex-
plosion.
Arkin, R. C. (1998). Behavior-Based Robotics. MIT Press.
Bar-Sinai, M., Weiss, G., and Shmuel, R. (2018). BPjs: An
Extensible, Open Infrastructure for Behavioral Pro-
gramming Research. In Proc. 21st ACM/IEEE Int.
Conf. on Model Driven Engineering Languages and
Systems (MODELS), pages 59–60.
Barrett, C. and Tinelli, C. (2018). Satisfiability Modulo
Theories. In Clarke, E., Henzinger, T., Veith, H.,
and Bloem, R., editors, Handbook of Model Check-
ing. Springer.
Biere, A., Cimatti, A., Clarke, E., and Zhu, Y. (1999). Sym-
bolic Model Checking without BDDs. In Proc. 5th Int.
Conf. on Tools and Algorithms for the Construction
and Analysis of Systems (TACAS), pages 193–207.
Bliudze, S. and Sifakis, J. (2008). A Notion of Glue Ex-
pressiveness for Component-Based Systems. In Proc.
19th Int. Conf. on Concurrency Theory (CONCUR),
pages 508–522.
Bloem, R., Jobstmann, B., Piterman, N., Pnueli, A., and
Saar, Y. (2012). Synthesis of Reactive(1) Designs.
Journal of Computer and System Sciences, 78(3):911–
938.
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
152

Blum, A. L. and Furst, M. L. (1997). Fast Planning Through
Planning Graph Analysis. Artificial intelligence, 90(1-
2):281–300.
Branicky, M. (1999). Behavioral Programming. In Work-
ing Notes AAAI Spring Symposium on Hybrid Systems
and AI.
Brooks, R. (1986). A Robust Layered Control System for a
Mobile Robot. Robotics and Automation, 2(1):14–23.
Chv
´
atal, V. (1983). Linear Programming. W. H. Freeman.
Clarke, E., Henzinger, T., Veith, H., and Bloem, R. (2018).
Handbook of Model Checking. Springer.
Damm, W. and Harel, D. (2001). LSCs: Breathing Life
into Message Sequence Charts. Journal on Formal
Methods in System Design (FMSD), 19(1):45–80.
De Moura, L. and Bjorner, N. (2008). Z3: An Efficient
SMT Solver. In Proc. 14th Int. Conf. on Tools and Al-
gorithms for the Construction and Analysis of Systems
(TACAS), pages 337–340.
Greenyer, J., Bar-Sinai, M., Weiss, G., Sadon, A., and
Marron, A. (2018). Modeling and Programming a
Leader-Follower Challenge Problem with Scenario-
Based Tools. In Proc. 21st ACM/IEEE Int. Conf. on
Model Driven Engineering Languages and Systems
(MODELS), pages 376–385.
Greenyer, J. and Gritzner, D. (2018). Generating Correct,
Compact, and Efficient PLC Code from Scenario-
based GR(1) Specifications. In Proc. 4th Int. Conf. on
System-Integrated Intelligence: Challenges for Prod-
uct and Production Engineering (SYSINT).
Greenyer, J., Gritzner, D., Gutjahr, T., K
¨
onig, F., Glade,
N., Marron, A., and Katz, G. (2017). ScenarioTools
— A Tool Suite for the Scenario-based Modeling and
Analysis of Reactive Systems. Journal of Science of
Computer Programming (J. SCP), 149:15–27.
Greenyer, J., Gritzner, D., Katz, G., and Marron, A.
(2016a). Scenario-Based Modeling and Synthesis for
Reactive Systems with Dynamic System Structure in
ScenarioTools. In Proc. 19th ACM/IEEE Int. Conf.
on Model Driven Engineering Languages and Systems
(MODELS), pages 16–23.
Greenyer, J., Gritzner, D., Katz, G., Marron, A., Glade, N.,
Gutjahr, T., and K
¨
onig, F. (2016b). Distributed Execu-
tion of Scenario-Based Specifications of Structurally
Dynamic Cyber-Physical Systems. In Proc. 3rd Int.
Conf. on System-Integrated Intelligence: Challenges
for Product and Production Engineering (SYSINT),
pages 552–559.
Gritzner, D. and Greenyer, J. (2018). Synthesizing Exe-
cutable PLC Code for Robots from Scenario-Based
GR(1) Specifications. In Proc. 4th Workshop of
Model-Driven Robot Software Engineering (MORSE),
pages 247–262.
Harel, D. Kantor, A., Katz, G., Marron, A., Weiss, G., and
Wiener, G. (2015a). Towards Behavioral Program-
ming in Distributed Architectures. Journal of Science
of Computer Programming (J. SCP), 98:233–267.
Harel, D. (1987). Statecharts: A Visual Formalism for
Complex Systems. Journal of Science of Computer
Programming (J. SCP), 8(3):231–274.
Harel, D., Kantor, A., Katz, G., Marron, A., Mizrahi, L.,
and Weiss, G. (2013). On Composing and Proving the
Correctness of Reactive Behavior. In Proc. 13th Int.
Conf. on Embedded Software (EMSOFT), pages 1–10.
Harel, D. and Katz, G. (2014). Scaling-Up Behavioral Pro-
gramming: Steps from Basic Principles to Applica-
tion Architectures. In Proc. 4th Int. Workshop on Pro-
gramming based on Actors, Agents, and Decentral-
ized Control (AGERE!), pages 95–108.
Harel, D., Katz, G., Lampert, R., Marron, A., and Weiss, G.
(2015b). On the Succinctness of Idioms for Concur-
rent Programming. In Proc. 26th Int. Conf. on Con-
currency Theory (CONCUR), pages 85–99.
Harel, D., Katz, G., Marelly, R., and Marron, A. (2016).
An Initial Wise Development Environment for Behav-
ioral Models. In Proc. 4th Int. Conf. on Model-Driven
Engineering and Software Development (MODEL-
SWARD), pages 600–612.
Harel, D., Katz, G., Marelly, R., and Marron, A. (2018).
Wise Computing: Toward Endowing System Devel-
opment with Proactive Wisdom. IEEE Computer,
51(2):14–26.
Harel, D., Katz, G., Marron, A., and Weiss, G. (2012a).
Non-Intrusive Repair of Reactive Programs. In Proc.
17th IEEE Int. Conf. on Engineering of Complex Com-
puter Systems (ICECCS), pages 3–12.
Harel, D., Katz, G., Marron, A., and Weiss, G. (2014). Non-
Intrusive Repair of Safety and Liveness Violations in
Reactive Programs. Transactions on Computational
Collective Intelligence (TCCI), 16:1–33.
Harel, D., Katz, G., Marron, A., and Weiss, G. (2015c). The
Effect of Concurrent Programming Idioms on Veri-
fication: A Position Paper. In Proc. 3rd Int. Conf.
on Model-Driven Engineering and Software Develop-
ment (MODELSWARD), pages 363–369.
Harel, D., Kugler, H., Marelly, R., and Pnueli, A. (2002).
Smart Play-Out of Behavioral Requirements. In Proc.
4th Int. Conf. on Formal Methods in Computer-Aided
Design (FMCAD), pages 378–398. Springer.
Harel, D., Maoz, S., Szekely, S., and Barkan, D. (2010a).
PlayGo: Towards a Comprehensive Tool for Scenario
Based Programming. In Proc. 10th Int. Conf. on Au-
tomated Software Engineering (ASE), pages 359–360.
Harel, D. and Marelly, R. (2003). Come, Let’s Play:
Scenario-Based Programming Using LSCs and the
Play-Engine. Springer.
Harel, D., Marron, A., and Weiss, G. (2010b). Pro-
gramming Coordinated Scenarios in Java. In Proc.
24th European Conf. on Object-Oriented Program-
ming (ECOOP), pages 250–274.
Harel, D., Marron, A., and Weiss, G. (2012b). Behav-
ioral Programming. Communications of the ACM,
55(7):90–100.
Harel, D., Marron, A., Weiss, G., and Wiener, G. (2011).
Behavioral Programming, Decentralized Control, and
Multiple Time Scales. In Proc. 1st SPLASH Work-
shop on Programming Systems, Languages, and Ap-
plications based on Agents, Actors, and Decentralized
Control (AGERE!), pages 171–182.
Harel, D. and Segall, I. (2012). Synthesis from live se-
quence chart specifications. Computer System Sci-
ences, 78(3):970–980.
IEEE (2006). Standard SystemC Lang. Ref. Manual. IEEE.
On-the-Fly Construction of Composite Events in Scenario-Based Modeling using Constraint Solvers
153

Katz, G. (2013). On Module-Based Abstraction and Re-
pair of Behavioral Programs. In Proc. 19th Int. Conf.
on Logic for Programming, Artificial Intelligence and
Reasoning (LPAR), pages 518–535.
Katz, G., Barrett, C., and Harel, D. (2015). Theory-Aided
Model Checking of Concurrent Transition Systems. In
Proc. 15th Int. Conf. on Formal Methods in Computer-
Aided Design (FMCAD), pages 81–88.
Kiczales, G., Lamping, J., Mendhekar, A., Maeda, C.,
Lopes, C., Loingtier, J., and Irwin, J. (1997). Aspect-
Oriented Programming. In Proc. 11th European Conf.
on Object-Oriented Programming (ECOOP), pages
220–242.
Mancinelli, F., Boender, J., Di Cosmo, R., Vouillon, J.,
Durak, B., and Leroy, R. (2006). Treinen: Manag-
ing the Complexity of Large Free and Open Source
Package Based Software Distributions. In Proc. 21st
IEEE/ACM Int. Conf. on Automated Software Engi-
neering (ASE), pages 199–208.
Marron, A., Hacohen, Y., Harel, D., M
¨
ulder, A., and Ter-
floth, A. (2018). Embedding Scenario-based Mod-
eling in Statecharts. In Proc. 5th Int. Workshop on
Model-Driven Robot Software Engineering (MORSE).
Nadel, A. (2009). Understanding and Improving a Modern
SAT Solver. Ph.D. Thesis, Tel Aviv University.
P
˘
as
˘
areanu, C. and Visser, W. (2009). A Survey of New
Trends in Symbolic Execution for Software Testing
and Analysis. Int. Journal on Software Tools for Tech-
nology Transfer, 11(4):339–353.
Sen, K. (2007). Concolic Testing. In Proc. 22nd IEEE/ACM
Int. Conf. on Automated Software Engineering (ASE),
pages 571–572.
Steinberg, S., Greenyer, J., Gritzner, D., Harel, D., Katz,
G., and Marron, A. (2015). Distributing Scenario-
Based Models: A Replicate-and-Project Approach. In
Proc. 5th Int. Conf. on Model-Driven Engineering and
Software Development (MODELSWARD), pages 182–
195.
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
154
