
Traffic Monitoring using an Object Detection Framework with Limited
Dataset
Vitalijs Komasilovs
1
, Aleksejs Zacepins
1
, Armands Kviesis
1
and Claudio Estevez
2
1
Department of Computer Systems, Faculty of Information Technologies,
Latvia University of Life Sciences and Technologies, Jelgava, Latvia
2
Department of Electrical Engineering, Universidad de Chile, Santiago, Chile
Keywords:
Traffic Monitoring, Smart City, Video Processing, Tensorflow, Object Detection.
Abstract:
Vehicle detection and tracking is one of the key components of the smart traffic concept. Modern city planning
and development is not achievable without proper knowledge of existing traffic flows within the city. Surveil-
lance video is an undervalued source of traffic information, which can be discovered by variety of information
technology tools and solutions, including machine learning techniques. A solution for real-time vehicle traffic
monitoring, tracking and counting is proposed in Jelgava city, Latvia. It uses object detection model for locat-
ing vehicles on the image from outdoor surveillance camera. Detected vehicles are passed to tracking module,
which is responsible for building vehicle trajectory and its counting. This research compares two different
model training approaches (uniform and diverse data sets) used for vehicle detection in variety of weather
and day-time conditions. The system demonstrates good accuracy of given test cases (about 92% accuracy in
average). In addition, results are compared to non-machine learning vehicle tracking approach, where notable
vehicle detection accuracy increase is demonstrated on congested traffic. This research is fulfilled within the
RETRACT (Enabling resilient urban transportation systems in smart cities) project.
1 INTRODUCTION
Vehicle recognition and tracking of its route is im-
portant task in ensuring smart traffic concept in the
modern cities, because it can provide important infor-
mation about traffic conditions, like velocity distribu-
tion and density of vehicles, as well as detect possible
traffic congestion.
Vehicle recognition can be accomplished using
different techniques and approaches, like pressure
sensors, inductive loops (Bhaskar et al., 2015), mag-
netoresistive sensors (Yang and Lei, 2015), radars
(Wang et al., 2016), ultrasound (Sifuentes et al.,
2011), infrared (Rivas-L
´
opez et al., 2015; Iwasaki
et al., 2013), stereo sensors (Lee et al., 2011) etc.
Recently, thanks to computing hardware performance
boost and development of advanced machine learn-
ing techniques, vehicles can be reliably recognized
on images or video streams using machine vision ap-
proach. During recent years, the use of vision-based
traffic systems has increased in popularity, both in
terms of traffic monitoring and control of autonomous
cars. Video cameras ensure traffic surveillance and
are components of intelligent transport system (ITS).
Such cameras helps to identify vehicles that violate
the traffic rules, e.g drive in a forbidden direction or
pass the crossroad through the red light, etc. The
use of image-based sensors and computer vision tech-
niques for data acquisition on the traffic of vehicles
has been intensely researched in the recent years (Tian
et al., 2011).
Usage of video cameras instead of other sen-
sors has several advantages: easy maintenance, high
flexibility, compact hardware, and software struc-
ture, which enhance the mobility and performance
(Thomessen, 2017). On the contrary, intrusive traffic
sensing technologies cause traffic disruption during
its installation process and are unable to detect slow
or static vehicles (Mandellos et al., 2011). Ethical and
privacy considerations related to video footage use for
traffic monitoring are out of scope of current research.
Usually, these topics are regulated by state or local
municipality laws (e.g. in Latvia there are outdoor
signs warning that video recording takes place in par-
ticular area).
The development of deep neural networks (DNNs)
has contributed to a significant improvement of the
computer vision tasks during the recent years. Neu-
Komasilovs, V., Zacepins, A., Kviesis, A. and Estevez, C.
Traffic Monitoring using an Object Detection Framework with Limited Dataset.
DOI: 10.5220/0007586802910296
In Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2019), pages 291-296
ISBN: 978-989-758-374-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
291

Figure 1: An example of video frame with marked area of
interest
ral networks refer to a way of approximating mathe-
matical functions inspired by the biology of the brain,
and hence the name neural. The neural network
method is based upon supervised training on object
with known properties, and has the capability to ex-
tend this trained knowledge to detect unknown object
properly. Convolutional Neural Networks (CNNs)
have recently been applied to various computer vision
tasks such as image classification (Chatfield et al.,
2014; Simonyan and Zisserman, 2014), semantic seg-
mentation (Hong et al., 2015; Long et al., 2015), ob-
ject detection (Girshick et al., 2014), and many others
(Noh et al., 2016; Toshev and Szegedy, 2014). There
are also many developed solutions and scientific pub-
lications related to usage of neural networks in vision
systems for vehicle recognition (Bengio et al., 2015;
Huval et al., 2015).
The aim of this research is to develop and demon-
strate application of machine learning framework for
real-time traffic monitoring based on publicly avail-
able video stream, as authors address the underes-
timated availability of video information on urban
roads, which can be definitely used for traffic flow
monitoring. For example, in authors’ hometown Jel-
gava, Latvia, there are more than 200 surveillance
cameras installed already. The live video for this
research is obtained from Jelgava municipality web
page
1
from stationary camera positioned aside the
road on the building wall by the address 5 J. Cakstes
Blvd., Jelgava, Latvia (see Fig. 1).
Vehicle traffic in the video occurs in the diago-
nal direction, from top right (farthest from the cam-
era) to bottom left (closest to the camera), and vice
versa. Video has Full HD resolution of 1920x1080
px at 30 frames per second. Apart from other objects
(e.g. wires, bridge, pedestrians, buildings, etc.) video
stream contains regular two-way (one lane in each di-
rection) road of Jelgava city.
In this article authors consider an approach that
1
http://www.jelgava.lv/lv/pilseta/tiessaistes-kamera/
provides vehicle detection and its trajectory registra-
tion. The problem to recognize and monitor vehicles
is usually separated into three main operations; detec-
tion, tracking and classification. Generally, detection
is the process of localizing objects (vehicles) in the
scene. Tracking is the problem of localizing the same
object over adjacent and consecutive frames, and clas-
sification is the process of categorizing the objects.
In this research authors do not classify vehicles be-
cause traffic predominantly consists of passenger cars
on the given road. This research focuses the follow-
ing: a) getting an image from a live video stream; b)
detection of the vehicle(s) on the image applying ma-
chine learning approach; c) tracking vehicles across
consecutive frames; d) registering and counting vehi-
cles traveling in each direction.
Current work is related to the previous authors’ re-
search, where vehicles are detected by applying back-
ground modeling and motion detection methods (Ko-
masilovs et al., 2018). Experimental results of both
approaches are compared and analyzed in the results
and discussion section of this publication.
2 MATERIALS AND METHODS
Basic work flow of the developed solution for vehi-
cle traffic detection and its trajectory registration is
shown in Fig. 2.
Input frames are extracted directly from YouTube
Full HD stream (1920x1080), cropped to area of in-
terest (576x648) and pushed to further processing,
described in subsections below. Solution is imple-
mented and tested using Python 3.5.2 environment.
To facilitate processing of live video stream in
real-time manner threaded application structure is
used. Dedicated thread is extracting frames from the
live stream, cropping and putting into limited size
buffer (FIFO queue of size 30). Another thread is
running the vehicle detection process described in the
next section. Taking into account that the detection
process is significantly slower than the frame rate of
the video, the buffer exceeds its limited size and older
frames are being discarded in favor of newer frames.
Such shifting of extracted frames within the buffer al-
lows consistent supply of actual frames for vehicle de-
tection process regardless of its current performance
and live stream networking peculiarities with a lag
proportioned to the buffer size (approx. 1 second for
30 fps video).
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
292
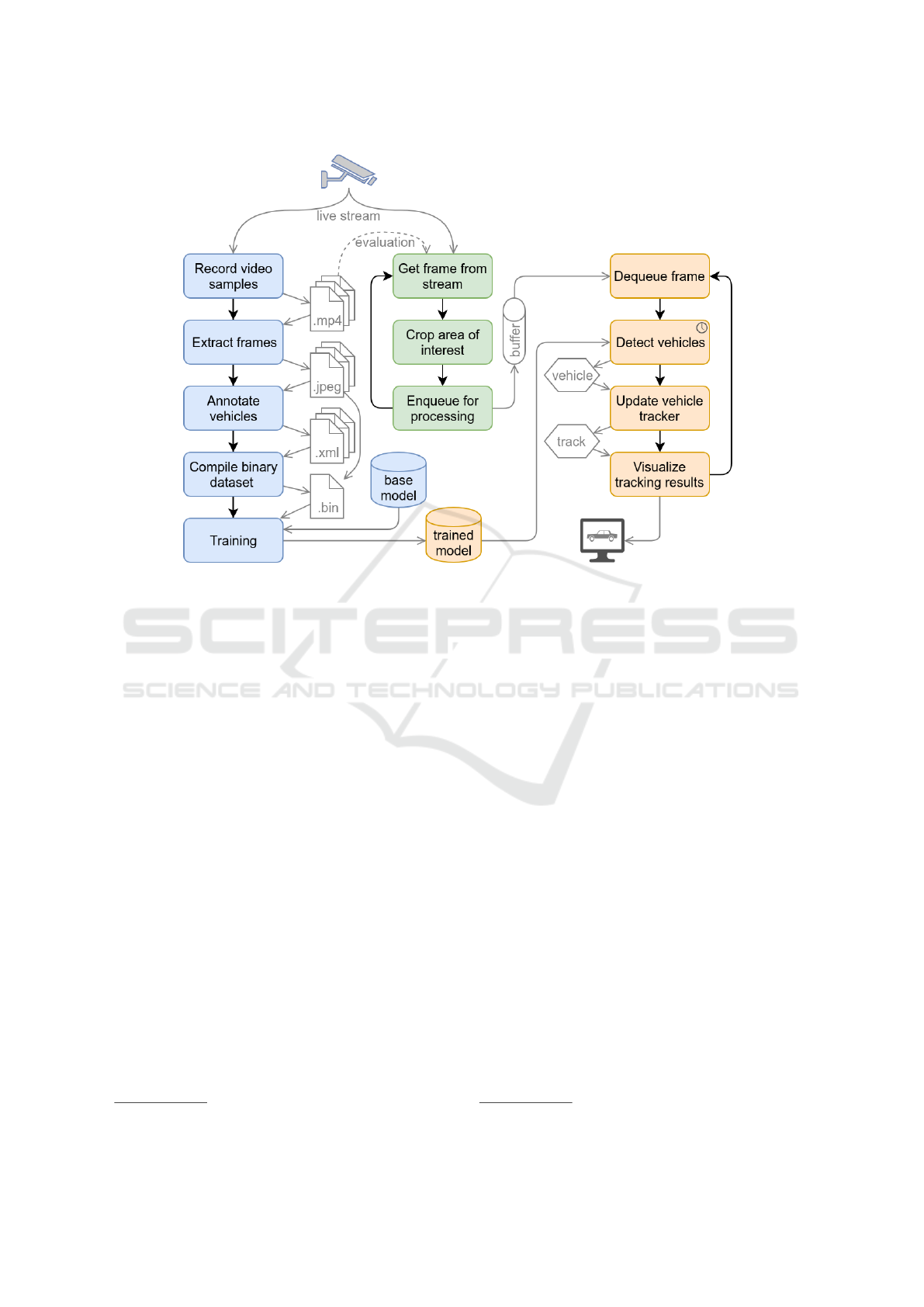
Figure 2: Principal process work flow.
2.1 Vehicle Detection
For the vehicle detection task open source machine
learning framework Tensorflow
2
is used. The frame-
work provides tools for flexible numeric computation
and machine learning across variety of platforms. As
a learning base SSD Mobilenet V1 model (Howard
et al., 2017) pre-trained on COCO dataset (Lin et al.,
2014) is used. The model structure is developed
with the aim for faster execution (object detection)
on commodity hardware. COCO dataset from other
hand provides highly diverse objects and their con-
texts. Application of such pre-trained model for do-
main specific object detection results in much faster
training process and robust results.
This model is further fine-trained on custom
dataset containing training examples extracted from
the camera images used in experiments. Application
of models pre-trained on large datasets makes training
faster and more reliable, it also simplifies the custom
dataset preparation due to the huge number of back-
ground examples included into the original model.
For experimental purposes a number of videos is
recorded from the aforementioned outdoor camera,
including different day time and weather conditions.
In general, preparation of versatile and balanced train-
ing dataset is non-trivial process, requires deep under-
2
https://www.tensorflow.org/
standing of target use-case domain and demand sig-
nificant time and effort (e.g. COCO dataset consists
of more then 200 thousands labeled images). From
the other hand, if the model use-case is bounded to
particular problem, then the model training can be
done using limited dataset. Representative samples
selected to training dataset can successfully cover pe-
culiarities of the given problem. Authors use two dif-
ferent approaches (experiments) for preparing train-
ing datasets.
As the first experiment, for model training pur-
poses single 10 minute long video recorded at 13:00
o’clock is used. Authors extracted one frame every
3 seconds (200 frames in total) and manually anno-
tated them marking vehicles on the road. Car annota-
tion was performed using the free software labelImg
3
.
Taking out frames without vehicles, prepared dataset
contained 137 frames. The data set preparation gave
a total of 231 annotated vehicles.
The second experimental dataset is created with
aim to increase the diversity of samples. 10 minute
long videos recorded at different times of the day
were used to ensure variance of illumination, weather
and road conditions. Frames are extracted with rate
of 1
−10
frames per second (60 frames per video, 480
frames in total). After a manual vehicle annotation
the dataset contained 277 frames with 525 vehicles.
3
https://github.com/tzutalin/labelImg
Traffic Monitoring using an Object Detection Framework with Limited Dataset
293

(a) typical traffic (b) congestion (c) dusk
Figure 3: Training samples.
Some of the annotated vehicles are shown in Fig.3.
To increase the diversity of training dataset, vari-
ous augmentation methods are applied to the dataset,
such as random cropping, flipping, change in hue,
contrast, brightness and saturation. This approach
simulates different scenarios that occurs during the
day, e.g illumination and vehicle orientation.
After the dataset is prepared, the next step is train-
ing and evaluation of vehicle detection model. There
are several challenges within this process: with less
training data, the parameter estimations will have
greater variance, and on the other hand, with less
evaluation data, the performance statistics will have
greater variance. Ideally, that variance should be as
small as possible for both.
Training of the model is performed on the cloud
using the Jupyter notebook environment Google Col-
laboratory
4
, which provides pre-configured access to
computational power needed for machine learning
technologies. The real-time vehicle tracking part of
the system uses trained model and runs on local com-
modity type computer (Intel i5, 16 GB RAM, no
GPU). For evaluation purposes full videos are used
and fed into real-time vehicle tracking module simi-
lar to live stream.
2.2 Vehicle Tracking
Vehicle tracking task stands for the problem of fol-
lowing the same vehicle through multiple subsequent
frames and can include various methods for trajectory
assignment, motion modeling, tracking result filter-
ing, and finally vehicle counting.
Unlike authors’ previous research (Komasilovs
et al., 2018), where vehicles tracking was relying
on motion detection and required advanced vehicle
motion modeling and prediction. The current re-
search uses simplified approach. The vehicle de-
tection model is applied on a provided video frame
(still image) without any information about previous
frames. Coordinates of each detected vehicle on sub-
sequent frames are stored by a tracking module. Us-
ing a modified Hungarian algorithm for linear sum
4
https://colab.research.google.com/
Figure 4: Principal process work flow.
assignment problem, vehicle detections (coordinates)
are assigned to the appropriate tracks by minimizing
the sum of distances between current detection and
last tracked position. Linear regression is applied on
raw trajectory points resulting in a straight line ap-
proximation of tracked vehicle trajectory. Example of
vehicle tracking is shown in Fig.4.
Taking into account reliability of vehicle detection
no additional tracking enhancements are applied. Ve-
hicles traveling in each direction are counted at the
moment when their linearized trajectory is crossing
(intersecting) a pre-defined registration line.
3 RESULTS AND DISCUSSION
This section describes the achieved results and their
evaluation for the proposed approach. In addition,
results are compared with previous authors’ results
achieved by using motion tracking approach for ve-
hicle detection (Komasilovs et al., 2018).
3.1 Setup of the Experiment
For proof of the concept and evaluation of the pro-
posed approach eight 10-minutes long video frag-
ments are used, which are recorded from the video
stream at different times of the day. On each video
fragment, vehicles are manually counted for ground
truth reference. Then, each fragment is processed us-
ing the proposed solution and results are collected
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
294
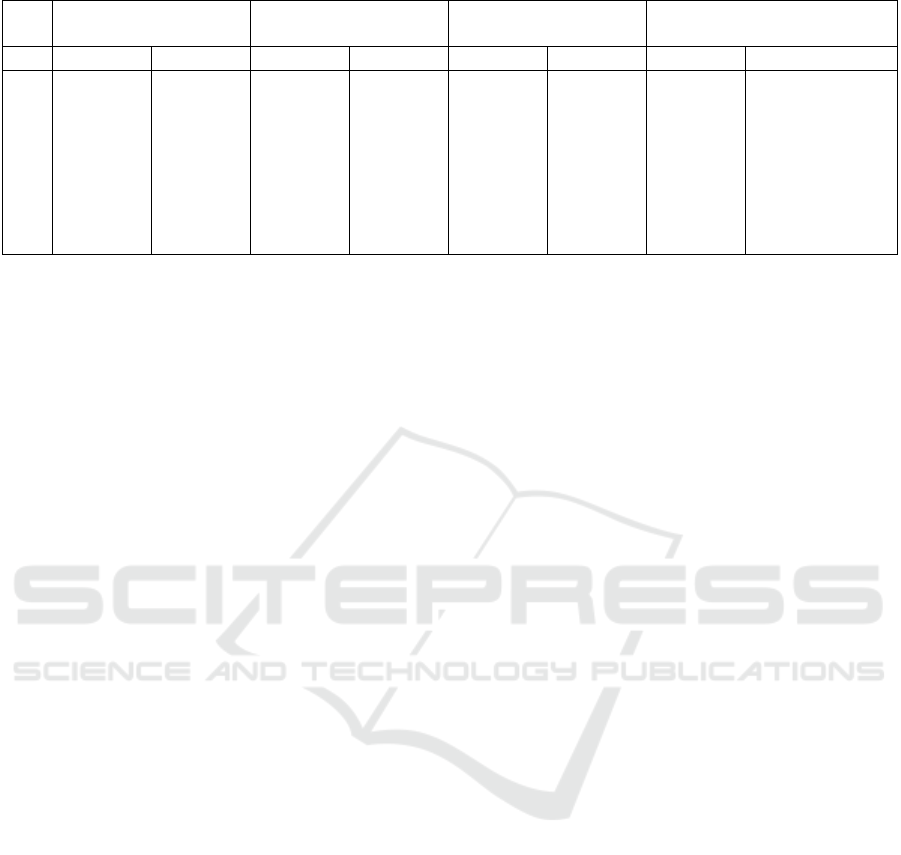
Table 1: Accuracy evaluation summary.
Ground truth
(number of vehicles)
Detection accuracy
(first experiment)
Detection accuracy
(second experiment)
Motion tracking accuracy
(Komasilovs et al., 2018)
Nr. to left to right to left to right to left to right to left to right
1 25 13 100% 92% 92% 77% 100% 100%
2 63 25 95% 96% 92% 88% 97% 96%
3 55 23 95% 96% 89% 83% 98% 100%
4 50 54 96% 93% 98% 98% 100% 98%
5 52 30 100% 93% 100% 97% 98% 93%
6 80 71 98% 94% 80% 94% 76% 97%
7 49 29 98% 83% 88% 72% 96% 93%
8 37 18 86% 89% 97% 94% 95% 94%
(see Table 1). Table represents eight different 10
minute long video fragments (test cases) recorded at
time from 07:00 to 21:00, ground truth number of ve-
hicles traveled in each direction (to left and to right)
during these fragments, and accuracy of vehicle de-
tection and tracking algorithms achieved on given
fragments.
3.2 Discussion
For the first experiment, the model was trained only
on about 130 frames from video recorded during mid-
day (13:00 to 13:10), but the assessment was per-
formed on video fragments from a variety of day-
time conditions (from 07:00 to 21:00). Taking into
account these peculiarities, results can be considered
as acceptable. Especially, noticeable improvement is
on handling congested traffic (test case 6, from 76%
to 98% accuracy comparing with previous approach),
where motion tracking method was not able to reli-
ably detect vehicles. On other hand, decrease in ac-
curacy for cases 7 and 8 can be explained by highly
different image parameters from training set (dusk re-
sulted in blueish colors dominating in the picture).
For the second experiment, the model is trained
on more then twice as many frames from a vari-
ety of videos with different day time and weather
conditions. The outcomes of the second experiment
demonstrate a worse average accuracy when com-
pared with the first experiment. The only notable
accuracy increase is observed in test case 8 (video
recorded at 21:00-21:10 during dusk). This can be
explained by the fact that the training dataset con-
tained highly diverse examples. Due to infrequent
training frame extraction (1
−10
frames per second)
vehicles were not annotated during entire traveling
trajectory, but instead different vehicles appeared in
different positions on usual trajectory. Adding vari-
ety of weather and daylight conditions (vehicle back-
grounds), all these peculiarities impeded vehicle gen-
eralization by the model and it learned only training
samples.
It is worth to mention the performance of both
methods applied for vehicle tracking. Motion track-
ing method is able to process every frame of 30 fps
video in real time on commodity type computer. Con-
trary, deep learning method takes about 200 ms per
frame to run vehicle detection model on the same
hardware. Taking into account the comparable ac-
curacy of these methods, the deep learning detection
model is viable only when congested traffic monitor-
ing is the target use case or it is executed on better
(GPU equipped) hardware.
4 CONCLUSIONS
Vehicle detection model was trained using a relatively
small training set and personnel hours, and achieved
results (92% vehicle detection and tracking accuracy
in average) can be considered as applicable for the
given use case. In particular, this can be explained by
the fact that pre-trained SSD MobileNet V1 model is
used as a base for the fine training vehicle detection
model.
This vehicle detection approach cannot be treated
as universal because the training set is bound to pe-
culiarities of particular locations, camera view an-
gles, color modes and other parameters. For develop-
ing a universal vehicle detection model a significantly
larger dataset is required. On the other hand, small
training set preparation and model training is a sim-
ple process and takes relatively small amount of time,
thus it can be repeated for each needed location sepa-
rately.
Comparing achieved results with other vehicle
tracking methods, like motion tracking, it can be con-
cluded that machine learning is not always a viable
option, as it requires significantly more processing
power, and other methods can provide similar or even
better results when tuned properly. Also machine
learning approaches become more suitable for com-
Traffic Monitoring using an Object Detection Framework with Limited Dataset
295

plex use cases, where besides vehicle tracking addi-
tional refinements are needed, such as object classifi-
cation, safety rules violation detection, etc.
ACKNOWLEDGEMENTS
Scientific research, publication, and presentation are
supported by the ERANet-LAC Project ”Enabling re-
silient urban transportation systems in smart cities”
(RETRACT, ELAC2015/T10-0761).
REFERENCES
Bengio, Y., Goodfellow, I. J., and Courville, A. (2015).
Deep learning. Nature, 521(7553):436–444.
Bhaskar, L., Sahai, A., Sinha, D., Varshney, G., and Jain, T.
(2015). Intelligent traffic light controller using induc-
tive loops for vehicle detection. In Next Generation
Computing Technologies (NGCT), 2015 1st Interna-
tional Conference on, pages 518–522. IEEE.
Chatfield, K., Simonyan, K., Vedaldi, A., and Zisserman,
A. (2014). Return of the devil in the details: Delv-
ing deep into convolutional nets. arXiv preprint
arXiv:1405.3531.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detec-
tion and semantic segmentation. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 580–587.
Hong, S., Noh, H., and Han, B. (2015). Decoupled deep
neural network for semi-supervised semantic segmen-
tation. In Advances in neural information processing
systems, pages 1495–1503.
Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D.,
Wang, W., Weyand, T., Andreetto, M., and Adam,
H. (2017). Mobilenets: Efficient convolutional neu-
ral networks for mobile vision applications. arXiv
preprint arXiv:1704.04861.
Huval, B., Wang, T., Tandon, S., Kiske, J., Song, W.,
Pazhayampallil, J., Andriluka, M., Rajpurkar, P.,
Migimatsu, T., Cheng-Yue, R., et al. (2015). An em-
pirical evaluation of deep learning on highway driv-
ing. arXiv preprint arXiv:1504.01716.
Iwasaki, Y., Kawata, S., and Nakamiya, T. (2013). Vehicle
detection even in poor visibility conditions using in-
frared thermal images and its application to road traf-
fic flow monitoring. In Emerging Trends in Comput-
ing, Informatics, Systems Sciences, and Engineering,
pages 997–1009. Springer.
Komasilovs, V., Zacepins, A., Kviesis, A., Pe
˜
na, E., Tejada-
Estay, F., and Estevez, C. (2018). Traffic monitoring
system development in jelgava city, latvia. In Pro-
ceedings of the 4th International Conference on Ve-
hicle Technology and Intelligent Transport Systems
- Volume 1: RESIST,, pages 659–665. INSTICC,
SciTePress.
Lee, C., Lim, Y.-C., Kwon, S., and Lee, J. (2011).
Stereo vision-based vehicle detection using a road fea-
ture and disparity histogram. Optical Engineering,
50(2):027004.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Euro-
pean conference on computer vision, pages 740–755.
Springer.
Long, J., Shelhamer, E., and Darrell, T. (2015). Fully con-
volutional networks for semantic segmentation. In
Proceedings of the IEEE conference on computer vi-
sion and pattern recognition, pages 3431–3440.
Mandellos, N. A., Keramitsoglou, I., and Kiranoudis, C. T.
(2011). A background subtraction algorithm for de-
tecting and tracking vehicles. Expert Systems with Ap-
plications, 38(3):1619–1631.
Noh, H., Hongsuck Seo, P., and Han, B. (2016). Image
question answering using convolutional neural net-
work with dynamic parameter prediction. In Proceed-
ings of the IEEE conference on computer vision and
pattern recognition, pages 30–38.
Rivas-L
´
opez, M., Gomez-Sanchez, C. A., Rivera-Castillo,
J., Sergiyenko, O., Flores-Fuentes, W., Rodr
´
ıguez-
Qui
˜
nonez, J. C., and Mayorga-Ortiz, P. (2015). Vehi-
cle detection using an infrared light emitter and a pho-
todiode as visualization system. In Industrial Elec-
tronics (ISIE), 2015 IEEE 24th International Sympo-
sium on, pages 972–975. IEEE.
Sifuentes, E., Casas, O., and Pallas-Areny, R. (2011). Wire-
less magnetic sensor node for vehicle detection with
optical wake-up. IEEE Sensors Journal, 11(8):1669–
1676.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Thomessen, E. A. (2017). Advanced vision based vehicle
classification for traffic surveillance system using neu-
ral networks. Master’s thesis, University of Stavanger,
Norway.
Tian, B., Yao, Q., Gu, Y., Wang, K., and Li, Y. (2011).
Video processing techniques for traffic flow monitor-
ing: A survey. In Intelligent Transportation Systems
(ITSC), 2011 14th International IEEE Conference on,
pages 1103–1108. IEEE.
Toshev, A. and Szegedy, C. (2014). Deeppose: Human pose
estimation via deep neural networks. In Proceedings
of the IEEE conference on computer vision and pat-
tern recognition, pages 1653–1660.
Wang, X., Xu, L., Sun, H., Xin, J., and Zheng, N. (2016).
On-road vehicle detection and tracking using mmw
radar and monovision fusion. IEEE Transactions on
Intelligent Transportation Systems, 17(7):2075–2084.
Yang, B. and Lei, Y. (2015). Vehicle detection and
classification for low-speed congested traffic with
anisotropic magnetoresistive sensor. IEEE Sensors
Journal, 15(2):1132–1138.
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
296
