
Mental Imagery for Intelligent Vehicles
Alice Plebe
1
, Riccardo Don
`
a
2
, Gastone Pietro Rosati Papini
2
and Mauro Da Lio
2
1
Department of Information Engineering and Computer Science, University of Trento, Italy
2
Department of Industrial Engineering, University of Trento, Italy
Keywords:
Autonomous Driving, Simulation Theory, Convergence-divergence Zones, Autoencoders.
Abstract:
The research in the design of self-driving vehicles has been boosted, in the last decades, by the developments
in the fields of artificial intelligence. Despite the growing number of industrial and research initiatives aimed at
implementing autonomous driving, none of them can claim, yet, to have reached the same driving performance
of a human driver. In this paper, we will try to build upon the reasons why the human brain is so effective
in learning tasks as complex as the one of driving, borrowing explanations from the most established theories
on sensorimotor learning in the field of cognitive neuroscience. The contribution of this work would like
to be a new point of view on how the known capabilities of the brain can be taken as an inspiration for the
implementation of a more robust artificial driving agent. In this direction, we consider the Convergence-
divergence Zones (CDZs) as the most prominent proposal in explaining the simulation process underlying the
human sensorimotor learning. We propose to use the CDZs as a “template” for the implementation of neural
network models mimicking the phenomenon of mental imagery, which is considered to be at the heart of the
human ability to perform sophisticated sensorimotor controls such driving.
1 INTRODUCTION
For the last two decades, artificial neural networks
(ANNs) have been at the very heart of many technol-
ogy developments (Schmidhuber, 2015; Chui et al.,
2018; Hazelwood et al., 2018). They have proved to
be the best available approach for a variety of differ-
ent problem domains (Liu et al., 2017; Jones et al.,
2017), and the design of autonomous vehicles is def-
initely one of the research areas to have amply ben-
efited from the rise of deep learning, e.g., (Bojarski
et al., 2017; Li et al., 2018; Schwarting et al., 2018).
In the recent years, however, some concerns have
emerged regarding certain crucial features of artificial
neural nets, which may call into question the relent-
less progress that was foreseen at first. In a recent
interview
1
at MIT, Yoshua Bengio, responsible for
many of the advancements of deep learning, pointed
out the inherent weakness of artificial neural networks
as opposed to expert systems:
“The knowledge in an expert systems is nicely
decomposed into a bunch of rules, whereas
neural nets [...] have this big blob of param-
eters which work intensely together to repre-
sent everything that the network knows. It is
1
https://agi.mit.edu (transcription of video interview)
not sufficiently factorized, and I think this is
one of the weaknesses of current neural nets”.
Such vulnerability appears to be a serious hindrance
in the application of artificial neural nets inside
safety-critical systems, like autonomous vehicles.
When treated as any other components of a car, neural
networks should comply with the ISO 26262
2
safety
standard, which covers all aspects of automotive de-
velopment, production and maintenance of safety-
related systems. In fact, a major challenge that has
yet emerged in implementing self-driving cars is how
to perform quality assessment when key components
are based on neural networks, as their intrinsic opaque
structure does not provide any explanation on what in-
formation in the input is considered to produce a cer-
tain prediction. This is known as the black-box issue,
characteristic of deep neural networks (Samek et al.,
2017; Ras et al., 2018).
A problem closely related to the above is how
to demonstrate that an autonomous driving agent is
(much) safer than a human driver. Obviously, the de-
sire to develop self-driving cars stems from the aspira-
tion of achieving safer streets for everyone – drivers,
passengers and pedestrians. Yet, none of the current
2
https://www.iso.org/standard/43464.html
Plebe, A., Donà, R., Papini Rosati, G. and Da Lio, M.
Mental Imagery for Intelligent Vehicles.
DOI: 10.5220/0007657500430051
In Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2019), pages 43-51
ISBN: 978-989-758-374-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
43

available implementations of autonomous vehicle can
claim to be nowhere close to the driving performance
of a human being. The issue also arises from the fact
that humans – contrary to common belief – are very
reliable at driving: in the US there are just 1.09 fa-
talities and 77 injuries per 100,000,000 human driven
miles (NHTSA, 2017).
Such considerations lead to reflect on why the hu-
man brain is so efficient in solving the driving task,
and if it is possible to take inspiration from the mech-
anisms whereby the brain learns to perform such a
complex task (inattention, alcohol, tiredness, drugs
etc., which are responsible for the vast majority of
the very-few human accidents, would not affect the
artificial system of course). That said, it is not the
intention of this paper to argue against the use of neu-
ral networks in the development of autonomous ve-
hicles. Rather, there is no question that nowadays
ANNs represent the method of choice for implement-
ing an high-performing artificial agent.
This work, hence, would like to contribute with
a novel perspective on how the capabilities of the
human brain can be used as inspiration for creating
an artificial driving agent, still largely based on deep
learning, but more robust. We propose to exploit the
current most established neurocognitive theories on
how the brain develops the ability to drive, to build
a neural network architecture less susceptible to the
black-box issues mentioned before. In the following
Section we will overview the most compelling hy-
pothesis on sensorimotor control learning of the brain,
in the domain of cognitive neuroscience. In §3 we
will show how these hypothesis can be considered as
a starting point for the development of a novel neural
network architecture, and finally §4 will present the
results of applying our ANN to a simulated driving
environment.
This paper results from one of the research
projects carried out as part of the European project
Dreams4Cars, where we are developing an artificial
driving agent inspired by the neurocognition of hu-
man driving, for further details refer to (Da Lio et al.,
2018).
2 THE NEUROCOGNITIVE
POINT OF VIEW
Humans are able to learn an impressive range of dif-
ferent, very complex, sensorimotor controls schemes
– from playing tennis to salsa dancing. The remark-
able aspect is that no motor skill is innate to humans,
not even the most basic ones, like walking or grasping
objects (Grillner and Wall
´
en, 2004). All motor con-
trols are, in fact, learned through lifetime. The pro-
cess of human sensorimotor learning involves sophis-
ticated computational mechanisms, like gathering of
task-relevant sensory information, selection of strate-
gies, and predictive control (Wolpert et al., 2011).
The ability to drive is just one of the many highly
specialized human sensorimotor behaviors. The brain
learns to solve the driving task with the same kind
of strategy adopted for every sort of motor plan-
ning that requires continuous and complex perceptual
feedback. We deem that the sophisticated control sys-
tem the human brain develops when learning to drive
by commanding the ordinary car interfaces – steering
wheel and pedals – may reveal precious insights on
how to implement a robust autonomous driving sys-
tem.
It should be noted that the human sensorimo-
tor learning is still far from being fully understood,
as there are several competing theories about which
components of the brain are engaged during learning.
However, a huge body of research in neuroscience and
cognitive neuroscience has been produced in the past
decades, which allows us to grasp some useful cues
for designing an artificial driving agent capable of
learning the sensorimotor controls necessary to drive.
2.1 The Simulation Theory
A well-established theory is the one proposed by
Jeannerod and Hesslow, the so-called simulation the-
ory of cognition, which proposes that thinking is es-
sentially simulated interaction with the environment
(Jeannerod, 2001; Hesslow, 2012). In the view of
Hesslow, simulation is a general principle of cogni-
tion, explicated in at least three different components:
perception, actions and anticipation. Perception can
be simulated by internal activation of sensory cortex
in a way that resembles its normal activation during
perception of external stimuli. Simulation of actions
can be performed when activating motor structures,
as during a normal behavior, but suppressing its actual
execution. Moreover, Hesslow argues that actions can
trigger perceptual simulation of their most probable
consequences.
The most simple case of simulation is mental im-
agery, especially in visual modality. This is the case,
for example, when a person tries to picture an object
or a situation. During this phenomenon, the primary
visual cortex (V1) is activated with a simplified repre-
sentation of the object of interest, but the visual stimu-
lus is not actually perceived (Kosslyn, 1994; Moulton
and Kosslyn, 2009).
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
44
2.2 The Emulation Theory
Another proposal in understanding certain aspects of
motor control and motor imagery, is the emulation
theory of representation (Grush, 2004), which can be
seen as a bridge linking theoretical cognitive neuro-
science to the engineering domain of control theory
and signal processing. According to this theory, the
brain does not simply engage with the body and en-
vironment, it is also able to construct neural circuits
that act as models of them. These models can also be
run offline, in order to predict outcomes of different
actions, and evaluate and develop motor plans.
Thus, the main difference between Hesslow’s sim-
ulation theory and Grush’s emulation theory is that
the latter claims that mere operation of the motor cen-
ters is not enough to produce imagery. According to
Grush, a bare motor plan is either a temporal sequence
of motor commands or a plan described by move-
ments of joint angles. Conversely, motor imagery is a
sequence of simulated proprioception and kinesthesis,
and it requires forward models of the musculoskeletal
system of the body.
One conceptual advantage of the emulation theory
is that it solves the conundrum of how proprioception
and kinesthesis can exist during motor imagery in ab-
sence of limbs modifications. On the other hand, it
faces the burden of explaining how a mental forward
model of the musculoskeletal system can be realized
at all. Grush proposes it can be realized by Kalman-
like filters, the most common system estimator used
in control engineering. While there are evidences
that Kalman filter schemes can account for several ex-
perimental data (Wolpert and Kawato, 1998; Colder,
2011), it is hard to tell if the brain actually solves
motor simulation in this way. In the Dreams4Cars
project we plan to experiment forward models based
on Kalman filters as well, but this is not the subject
of this paper. Therefore we will not get into more de-
tails of emulators, and we concentrate instead on other
proposals about how simulation may take place in the
brain.
2.3 Convergence-divergence Zones
Any neural theory claiming to explain the simulation
process, in the first place, is required to simultane-
ously:
1. identify the neural mechanisms that are able to
extract information relevant to the action, from a
large amount of sensory data,
2. recall related concepts from memory during im-
agery.
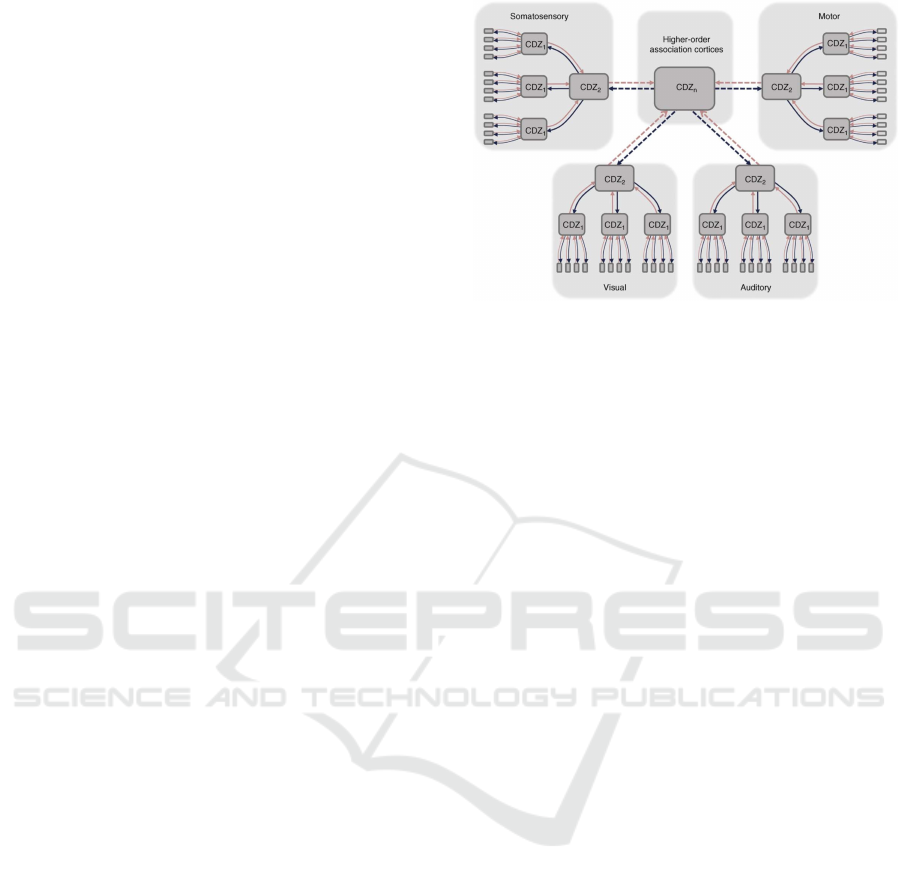
Figure 1: Schematic representation of the CDZ framework
by Meyer and Damasio. Neuron ensembles in early sen-
sorimotor cortices of different modalities send converging
forward projections (red arrows) to higher-order associa-
tion cortices, which, in turn, project back divergently (black
arrows) to the early cortical sites, via several intermediate
steps.
A prominent proposal in this direction has been for-
mulated in terms of convergence-divergence zones
(CDZs) (Meyer and Damasio, 2009). They derive
from an earlier model (Damasio, 1989) which high-
lighted the “convergent” aspect of certain neuron en-
sembles, located downstream from primary sensory
and motor cortices. Such convergent structure con-
sists in the projection of neural signals on multiple
cortical regions in a many-to-one fashion.
The primary purpose of convergence is to record,
by means of synaptic plasticity, which patterns of fea-
tures – coded as knowledge fragments in the early
cortices – occur in relation with a specific concept.
Such records are built through experience, by inter-
acting with objects. On the other hand, a requirement
for convergence zones (already found in the first pro-
posal of Damasio) is the ability to reciprocate feedfor-
ward projections with feedback projections in a one-
to-many fashion. This feature is now made explicit in
the CDZ naming.
The convergent flow is dominant during percep-
tual recognition, while the divergent flow dominates
imagery. Damasio postulates that switching between
one of the two modes may depend on time-locking. If
activations in a CDZ is synchronous with activity in
separate feeding cortical sites, than perceptual recog-
nition takes place. Conversely, imagery is driven by
synchronization with backprojecting cortical areas.
Convergent-divergent connectivity patterns can be
identified for specific sensory modalities, but also in
higher order association cortices, as shown in the hier-
archical structure in Fig. 1. It should be stressed that
CDZs are rather different from a conventional pro-
cessing hierarchy, where processed patterns are trans-
Mental Imagery for Intelligent Vehicles
45

ferred from earlier to higher cortical areas. In CDZs,
part of the knowledge about perceptual objects is re-
tained in the synaptic connections of the convergent-
divergent ensemble. This allows to reinstate an ap-
proximation of the original multi-site pattern of a re-
called object or scene.
3 ARTIFICIAL MENTAL
IMAGERY
The CDZ hypothesis has found in the years support
of a large body of neurocognitive and neurophysio-
logical evidence. However, it is a purely descriptive
model and does not address the crucial issue of how
the same neural assembly, which builds connections
by experiences in the convergent direction, can com-
putationally work in the divergent direction as well.
At the moment, there are no computational mod-
els that faithfully replicate the behavior of CDZs,
however, we found that an independent notion, intro-
duced in the field of artificial intelligence for very dif-
ferent purposes, bears significant similarities with the
CDZ scheme. In our opinion, the most direct mech-
anism to simulate perception in the realm of artificial
neural networks is the autoencoder.
Autoencoder architectures have been the corner-
stone of the evolution from shallow to deep neural
architectures (Hinton and Salakhutdinov, 2006; Vin-
cent et al., 2010). The crucial issue of training neu-
ral architectures with multiple internal layers was ini-
tially solved associating each internal layers with a
Restricted Boltzmann Machine (Hinton and Salakhut-
dinov, 2006), so that they can be pre-trained individu-
ally in unsupervised manner. The adoption of autoen-
coders overcome the training cost of Boltzmann Ma-
chines: each internal layer is trained in unsupervised
manner, as an ordinary fully connected layer. The key
idea is to use the same input tensor as target of the
output, and therefore to train the layer to optimize the
reconstruction of the input (Larochelle et al., 2009).
In the first layer the inputs are that of the entire neural
model, for all subsequent layers the hidden units’ out-
puts of the previous layer are now used as input. The
overall result is a regularization of the entire model
similar to the one obtained with Boltzmann Machine
(Bengio, 2009), or even a better one (Vincent et al.,
2010).
Soon after, refinement of algorithms for initial-
ization (Glorot and Bengio, 2010) and optimization
(Kingma and Ba, 2014) of weights, made any type of
unsupervised pre-training method superfluous. How-
ever, autoencoders find a new role for capturing com-
pact information from visual inputs (Krizhevsky and
Hinton, 2011). In this kind of models the task to be
solved by the network is to simulate as output the
same picture fed as input. The advantage is that while
learning to reconstruct the input image, the model de-
velops a very compact internal representation of the
visual scene. Models able to learn such representa-
tion are closely connected with the cognitive activity
of mental imagery.
3.1 Autoencoder-based CDZ Models
In the context of autonomous driving agents, there
is a range of different levels at which we can design
models with autoencoder-like architectures acting as
CDZs. Similarly to the hierarchical arrangement of
CDZs in the brain, as described by Meyer and Dama-
sio (again, Fig.1), autoencoder-based models can be
placed at a level depending on the distance covered
by the processing path, from the lowest primary cor-
tical areas to the output of the simulation.
In the context of Dreams4Cars, we considered as
the lowest level of model design the processes that
start from the raw image data and converge up to sim-
ple visual features. Consequently, the divergent path
outputs in the same format as the input image.
At an intermediate level, the convergent process-
ing path leads to representations that are no more in
terms of visual features, rather in terms of “concepts”.
Our brain naturally projects sensorial information, es-
pecially visual, into conceptual space, where the lo-
cal perceptual features are pruned, and neural activa-
tions code the nature of entities present in the environ-
ment that produced the stimuli. The conceptual space
is the mental scaffolding the brain gradually learns
through experience, as internal representation of the
world (Seger and Miller, 2010). As highlighted by
(Olier et al., 2017) CDZs are a valid systemic candi-
date for how the formation of concepts takes place at
brain level. There is clearly no single unified center in
the brain acting as conceptual space, the organization
is far more complex. There are distinctive properties
of objects like shape, way of moving and interacting
with, which are represented in the same sensory and
motor systems that are active when information about
these properties was acquired. There are also other
regions that seem to show a categorical organization
(Martin, 2007; Mahon and Caramazza, 2011). In the
driving context it is not necessary to infer categories
for every entity present in the scene, it is useful to
project in conceptual space only the objects relevant
to the driving task, in the models here presented we
choose to consider the two main concepts of cars and
lanes.
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
46

Figure 2: Orthographic view of the road track created in
Blender, used for the simulation of road traffic.
A model at a higher level associates the conver-
gent paths from visual processes with motor com-
mands, and its divergent path outputs in the format
of action representations. For the purpose of driving,
we will use as representation format a space of two di-
mensions, the steering rate (
1
/ms) and the longitudinal
jerk (
m
/s
3
). The choice for this motor space derives
from the Optimal Control (OC) theory. More specifi-
cally, the minimization of the squared jerk integral is
known to lead to smooth human-like control actions
(Bertolazzi et al., 2003; Liu and Todorov, 2007). This
higher level has not been fully developed in neural
networks yet, therefore this paper will not focus on it.
At all levels, the implementations presented in this
paper are synchronous: the convergent phase is ap-
plied to data locked in time to the same of the diver-
gent phase. An extension under development in our
project is to delay in time the divergent phase. In this
case, for all levels it becomes necessary the integra-
tion of an additional convergence zone, corresponding
to cortical proprioception. In the context of the driv-
ing task, it is the processing of information about ego-
velocity and ego-heading, together with their time
derivatives. This sort of information is clearly neces-
sary in order to imagine, when driving, a visual scene
projected in the future.
4 RESULTS
Here we present the implementations of two mod-
els of artificial visual imagery, corresponding to the
two lower levels described in §3.1. Both models
are implemented as artificial neural networks with
autoencoder-like architectures. In all the experiments
here presented, the training samples are generated
through a customized simulation of road traffic, real-
ized with the 3D computer graphics software Blender.
In this phase of the project the availability of a cus-
tomized dataset is precious, for the most flexible con-
trol of the training set composition, with respect to
parameters such as ego-velocity range, range of ve-
locity of the other cars, range of road bending radius,
complexity of the environment scenario, and so on.
For these sort of purposes Blender is often the soft-
ware of choice, thanks to its flexible programmability
(Mayer et al., 2016; Biedermann et al., 2016). Fig. 2
shows the road track used in the experiments.
The first neural network here presented corre-
sponds to the lowest level model, its divergent path
produces a prediction in visual space reconstructing
the same color image received as input. The archi-
tecture, shown in Fig. 3, is composed of a stack of
convolutional layers, followed by flat layers, then a
symmetric stack of deconvolutional layers. There is
a clear discrepancy between the physical structure of
biological CDZs and this model. In the CDZs the
same neural assemblies are able to compute the for-
ward direction (acting as convergent processors) and
the backward direction (when acting as divergent pro-
cessors). In our model there are two distinct blocks: a
stack of convolutions working as convergent proces-
sors, and a stack of deconvolutions working as diver-
gent processors. However, the similarity between our
model and Damasio’s CDZs is preserved from a com-
putational point of view, as the structure of each con-
volution in the stack is specular to the corresponding
deconvolution transformation in the second stack, and
both transformations derive their kernel parameters
from learning on the same image samples. As stated
in §3.1, this implementation is purely synchronous,
without temporal delay between convergence and di-
vergence, therefore there is no need for proprioceptive
input, in addition to the visual one. The autoencoder
was trained on a dataset of 100,000 images generated
in Blender, with 10% of samples used as validation
set. We adopted Adam as gradient-based optimizer
(Kingma and Ba, 2014), and the mean squared error
as loss function. The final loss obtained was 0.0025,
computed on the test set.
The second model aims at diverging into a space
which is still retinotopically bounded, but with neu-
ral activation coding for “concepts”. As described in
§3.1 we take into account the concepts of cars and
lanes. Each concept has its own corresponding di-
vergence path in the network, while the convergence
pathway is common and is the same of the previous
model, since it shares the same basic visual features.
The model is depicted in Fig. 4. The innermost layer
can be seen as a compact representation of the scene,
made by 384 neurons, disentangled into three par-
tially distinct classes: visual representations irrespec-
tive of concepts, representations selective for car en-
tities, and representations selective for lane entities.
Each of the disentangled representations is made of
128 neurons. Note that there is no special architec-
tural design for disentangling the car and lane con-
Mental Imagery for Intelligent Vehicles
47
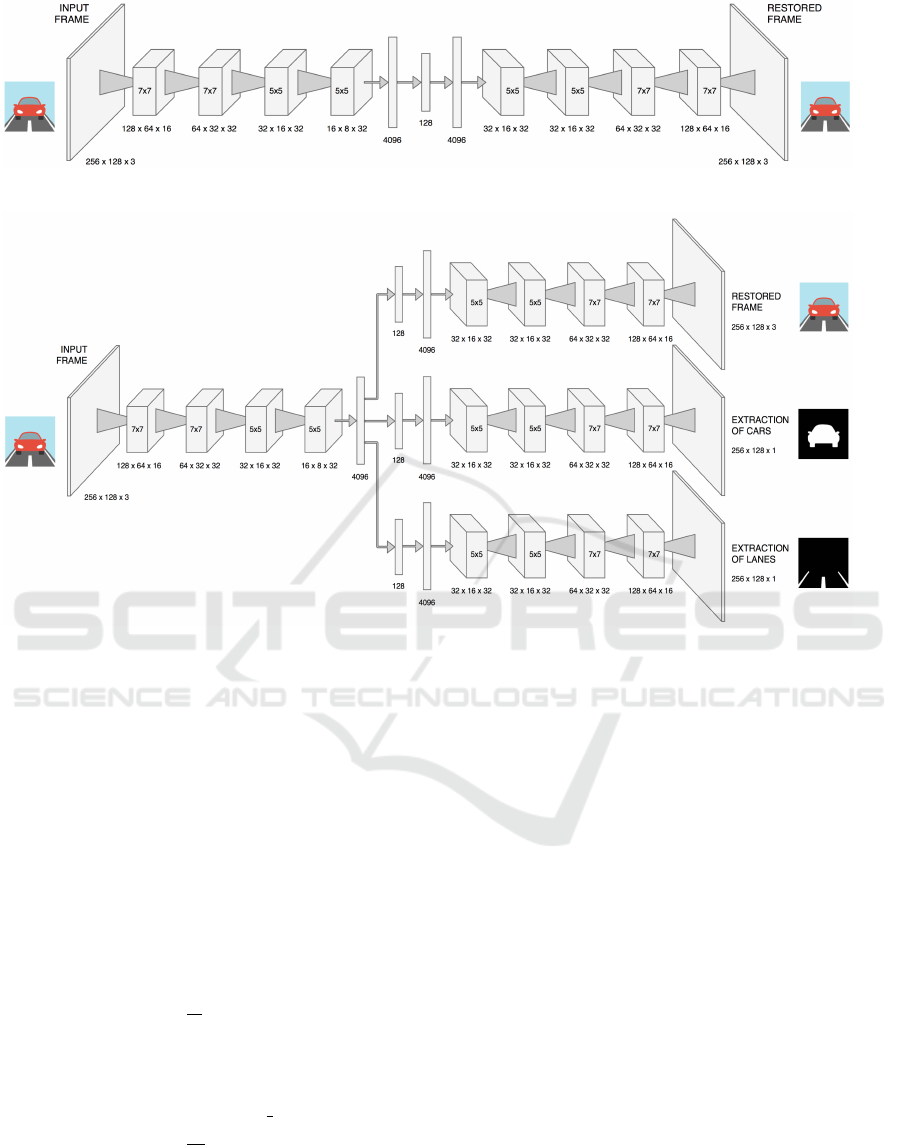
Figure 3: Scheme of the neural network implementing the lower level CDZ model.
Figure 4: Scheme of the neural network implementing the intermediate level CDZ model.
cepts, the only difference is in the training regimes
upon which the different divergence pathways were
trained. In the case of concepts, the target output of
each divergent pathway is a binary image with true
values signaling pixels belonging to the concept at
hand, as shown on the right of Fig. 4. Being the target
pixels Boolean values, the loss function is the cross-
entropy. Since there is a large imbalance of pixels that
do not belong to either concepts – with respect to pix-
els that do belong to – the cross entropy is weighted
to tackle class imbalance (Sudre et al., 2017). In our
formulation the loss L of a prediction of the model
ˆ
y
against a ground truth y is the following:
L (y,
ˆ
y) = −
1
N
N
∑
i
( p(y
i
) q(y
i
, ˆy
i
) ) (1)
p(y) = (1 − P)y + P(1 − y) (2)
q(y, ˆy) = y log ˆy + (1 − y)log(1 − ˆy) (3)
P =
1
M
M
∑
j
y
j
!
1
k
(4)
where N is the number of pixels in an image, M is
the number of all pixels in the training dataset, and
P is the ratio of true value pixels over all the pixels
in the dataset. The parameter k is used to smooth the
effect of weighting by the probability of ground truth,
a value evaluated empirically as valid is 4.
Although the two conceptual divergence pathways
are trained separately, several of the training input
samples are common, while the target outputs are dif-
ferent, depending on the class of concept. This pro-
cedure bears resemblance with the work of (Kulka-
rni et al., 2015), where groups of neurons in an inner
layer of a CNN model have been “encouraged” (in the
Authors’ words) to learn separate representations. In
the case of Kulkarni and co-workers the disentangled
representations are classes of graphic primitives, such
as poses or lightnings, while in our case the disentan-
gled representations are for car and lane entities.
Fig. 5 shows prediction of the two implemented
models, on two input samples (leftmost pictures). The
results of the lowest level model are shown in the cen-
tral pictures. It is well visible how the outcome of
this model is fairly faithful with respect to the over-
all scene, including the far landscape. It is, how-
ever, scarcely sensible to the features that change in
time faster than the surround, and appear more rarely
compared to other features. This is exactly the case
of other cars, some of which disappear almost com-
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
48
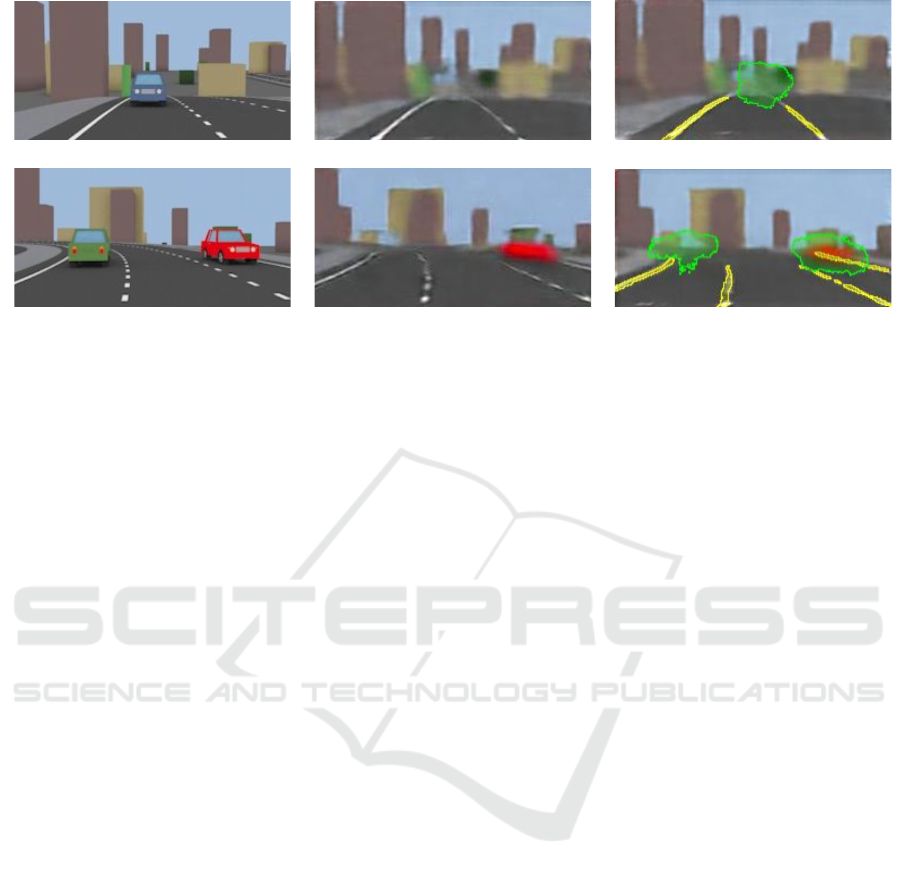
Figure 5: Results of the models’ predictions: on the left the original frames; on the center the outputs of the model diverging
in visual space; on the right the frames predicted by the intermediate level model, with lane entities highlighted in yellow and
car entities highlighted in green.
pletely in the samples shown in Fig. 5.
The results of the CDZ model in conceptual space
are shown in the rightmost pictures. The output of the
two conceptual divergent paths are merged into sin-
gle images for better visibility, the green overlays are
the output of the car divergent path, and the yellow
overlays are the output of the lane divergent path (the
background image is the same output of the lower di-
vergent path). Note that the true aim of our model is
not to produce a semantic segmentation of the input
images, but to induce the model to learn disentangled
representations of the main conceptual features fun-
damental to the driving task. The resulting images
nicely show how the projection of the sensorial in-
put (original frames) into conceptual representation is
very effective in identifying and preserving the sensi-
ble features of cars and lanes, even in the situations
when the lowest level model failed to capture them,
like in the case of cars moving at a high speed.
5 CONCLUSIONS
Following the outstanding achievements of deep
learning, here we presented an artificial neural net-
work model inspired by the convergence-divergence
zones architecture proposed by Meyer and Damasio.
Our solution adopts an autoencoder-like architecture,
and we exploit its known generative capabilities for
mimicking mental imagery, i.e. the feedback projec-
tions in the CDZ. Despite the autonomous driving fo-
cus of the paper, the overall approach could, in prin-
ciple, be extended to the broader field of robotics by
adapting the inner levels of the model to learn the rep-
resentations of motor commands intended for the spe-
cific agent. The architecture developed is pretty flex-
ible, in the sense that our framework can be extended
to simulate other complex human motor abilities, as
supported by the logical evidences of the CDZ hy-
pothesis.
Our future plans involve the finalization of the
higher level model of the architecture which computes
motor commands from the conceptual representation
of the environment presented in this work.
ACKNOWLEDGEMENTS
This work was developed inside the EU Horizon
2020 Dreams4Cars Research and Innovation Action
project, supported by the European Commission un-
der Grant 731593.
REFERENCES
Bengio, Y. (2009). Learning deep architectures for AI.
Foundation and Trends in Machine Learning, 2:1–
127.
Bertolazzi, E., Biral, F., and Da Lio, M. (2003). Symbolic-
numeric efficient solution of optimal control problems
for multibody systems. Journal of Computational and
Applied Mathematics, 185:404–421.
Biedermann, D., Ochs, M., and Mester, R. (2016). Evalu-
ating visual ADAS components on the COnGRATS
dataset. In IEEE Intelligent Vehicles Symposium,
pages 986–991.
Bojarski, M., Yeres, P., Choromanaska, A., Choromanski,
K., Firner, B., Jackel, L., and Muller, U. (2017). Ex-
plaining how a deep neural network trained with end-
to-end learning steers a car. CoRR, abs/1704.07911.
Chui, M., Manyika, J., Miremadi, M., Henke, N., Chung,
R., Nel, P., and Malhotra, S. (2018). Notes from the AI
Mental Imagery for Intelligent Vehicles
49

frontier: insights from hundreds of use cases. Techni-
cal Report April, McKinsey Global Institute.
Colder, B. (2011). Emulation as an integrating principle for
cognition. Frontiers in Human Neuroscience, 5:Arti-
cle 54.
Da Lio, M., Plebe, A., Bortoluzzi, D., Rosati Papini, G. P.,
and Don
`
a, R. (2018). Autonomous vehicle architec-
ture inspired by the neurocognition of human driv-
ing. In International Conference on Vehicle Tech-
nology and Intelligent Transport Systems, pages 507–
513. Scitepress.
Damasio, A. (1989). Time-locked multiregional retroacti-
vation: A systems-level proposal for the neural sub-
strates of recall and recognition. Cognition, 33:25–62.
Glorot, X. and Bengio, Y. (2010). Understanding the dif-
ficulty of training deep feedforward neural networks.
In International Conference on Artificial Intelligence
and Statistics, pages 249–256.
Grillner, S. and Wall
´
en, P. (2004). Innate versus learned
movements – a false dichotomy. Progress in Brain
Research, 143:1–12.
Grush, R. (2004). The emulation theory of representation:
Motor control, imagery, and perception. Behavioral
and Brain Science, 27:377–442.
Hazelwood, K., Bird, S., Brooks, D., Chintala, S., Diril, U.,
Dzhulgakov, D., Fawzy, M., Jia, B., Jia, Y., Kalro, A.,
Law, J., Lee, K., Lu, J., Noordhuis, P., Smelyanskiy,
M., Xiong, L., and Wang, X. (2018). Applied machine
learning at Facebook: A datacenter infrastructure per-
spective. In IEEE International Symposium on High
Performance Computer Architecture (HPCA), pages
620–629.
Hesslow, G. (2012). The current status of the simulation
theory of cognition. Brain, 1428:71–79.
Hinton, G. E. and Salakhutdinov, R. R. (2006). Reducing
the dimensionality of data with neural networks. Sci-
ence, 28:504–507.
Jeannerod, M. (2001). Neural simulation of action: A uni-
fying mechanism for motor cognition. NeuroImage,
14:S103–S109.
Jones, W., Alasoo, K., Fishman, D., and Parts, L. (2017).
Computational biology: deep learning. Emerging Top-
ics in Life Sciences, 1:136–161.
Kingma, D. P. and Ba, J. (2014). Adam: A method for
stochastic optimization. In Proceedings of Interna-
tional Conference on Learning Representations.
Kosslyn, S. M. (1994). Image and Brain: the Resolution of
the Imagery Debate. MIT Press, Cambridge (MA).
Krizhevsky, A. and Hinton, G. E. (2011). Using very deep
autoencoders for content-based image retrieval. In
European Symposium on Artificial Neural Networks,
Computational Intelligence and Machine Learning,
pages 489–494.
Kulkarni, T. D., Whitney, W. F., Kohli, P., and Tenenbaum,
J. B. (2015). Deep convolutional inverse graphics net-
work. In Advances in Neural Information Processing
Systems, pages 2539–2547.
Larochelle, H., Bengio, Y., Louradour, J., and Lamblin, P.
(2009). Exploring strategies for training deep neu-
ral networks. Journal of Machine Learning Research,
1:1–40.
Li, J., Cheng, H., Guo, H., and Qiu, S. (2018). Survey on
artificial intelligence for vehicles. Automotive Innova-
tion, 1:2–14.
Liu, D. and Todorov, E. (2007). Evidence for the flexible
sensorimotor strategies predicted by optimal feedback
control. Journal of Neuroscience, 27:9354–9368.
Liu, W., Wang, Z., Liu, X., Zeng, N., Liu, Y., and Alsaadi,
F. E. (2017). A survey of deep neural network ar-
chitectures and their applications. Neurocomputing,
234:11–26.
Mahon, B. Z. and Caramazza, A. (2011). What drives the
organization of object knowledge in the brain? the dis-
tributed domain-specific hypothesis. Trends in Cogni-
tive Sciences, 15:97–103.
Martin, A. (2007). The representation of object concepts in
the brain. Annual Review of Psychology, 58:25–45.
Mayer, N., Ilg, E., H
¨
ausser, P., Fischer, P., Cremers, D.,
Dosovitskiy, A., and Brox, T. (2016). A large dataset
to train convolutional networks for disparity, optical
flow, and scene flow estimation. In Proc. of IEEE In-
ternational Conference on Computer Vision and Pat-
tern Recognition, pages 4040–4048.
Meyer, K. and Damasio, A. (2009). Convergence and di-
vergence in a neural architecture for recognition and
memory. Trends in Neuroscience, 32:376–382.
Moulton, S. T. and Kosslyn, S. M. (2009). Imagining
predictions: mental imagery as mental emulation.
Philosophical transactions of the Royal Society B,
364:1273–1280.
NHTSA (2017). Fatality Analysis Reporting System
(FARS).
Olier, J. S., Barakova, E., Regazzoni, C., and Rauterberg,
M. (2017). Re-framing the characteristics of concepts
and their relation to learning and cognition in artificial
agents. Cognitive Systems Research, 44:50–68.
Ras, G., van Gerven, M., and Haselager, P. (2018). Explana-
tion methods in deep learning. In Escalante, H. J., Es-
calera, S., Guyon, I., Bar
´
o, X., G
¨
uc¸l
¨
ut
¨
urk, Y., G
¨
uc¸l
¨
u,
U., and van Gerven, M., editors, Explainable and In-
terpretable Models in Computer Vision and Machine
Learning. Springer-Verlag, Berlin.
Samek, W., Wiegand, T., and M
¨
uller, K. (2017). Explain-
able artificial intelligence: Understanding, visualiz-
ing and interpreting deep learning models. CoRR,
abs/1708.08296.
Schmidhuber, J. (2015). Deep learning in neural networks:
An overview. Neural Networks, 61:85–117.
Schwarting, W., Alonso-Mora, J., and Rus, D. (2018). Plan-
ning and decision-making for autonomous vehicles.
Annual Review of Control, Robotics, and Autonomous
Systems, 1:8.1–8.24.
Seger, C. A. and Miller, E. K. (2010). Category learning
in the brain. Annual Review of Neuroscience, 33:203–
219.
Sudre, C. H., Li, W., Vercauteren, T., Ourselin, S., and Car-
doso, M. J. (2017). Generalised dice overlap as a deep
learning loss function for highly unbalanced segmen-
tations. In Cardoso, J., Arbel, T., Carneiro, G., Syeda-
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
50

Mahmood, T., Tavares, J. M. R., Moradi, M., Bradley,
A., Greenspan, H., Papa, J. P., Madabhushi, A., Nasci-
mento, J. C., Cardoso, J. S., Belagiannis, V., and Lu,
Z., editors, Deep Learning in Medical Image Analysis
and Multimodal Learning for Clinical Decision Sup-
port, pages 240–248.
Vincent, P., Larochelle, H., Lajoie, I., Bengio, Y., and
Manzagol, P.-A. (2010). Stacked denoising autoen-
coders: Learning useful representations in a deep net-
work with a local denoising criterion. Journal of Ma-
chine Learning Research, 11:3371–3408.
Wolpert, D. M., Diedrichsen, J., and Flanagan, R. (2011).
Principles of sensorimotor learning. Nature Reviews
Neuroscience, 12:739–751.
Wolpert, D. M. and Kawato, M. (1998). Multiple paired
forward and inverse models for motor control. Neural
Networks, 11:1317–1329.
Mental Imagery for Intelligent Vehicles
51
