
3D Car Tracking using Fused Data in Traffic Scenes for Autonomous
Vehicle
Can Chen, Luca Zanotti Fragonara and Antonios Tsourdos
SATM, Cranfield University, College Road, Cranfield, Bedford, U.K.
Keywords:
3D Bounding Box, Car Detection, Multiple Object Tracking, Autonomous Vehicle.
Abstract:
Car tracking in a traffic environment is a crucial task for the autonomous vehicle. Through tracking, a self-
driving car is capable of predicting each car’s motion and trajectory in the traffic scene, which is one of the
key components for traffic scene understanding. Currently, 2D vision-based object tracking is still the most
popular method, however, multiple sensory data (e.g. cameras, Lidar, Radar) can provide more information
(geometric and color features) about surroundings and show significant advantages for tracking. We present a
3D car tracking method that combines more data from different sensors (cameras, Lidar, GPS/IMU) to track
static and dynamic cars in a 3D bounding box. Fed by the images and 3D point cloud, a 3D car detector and
the spatial transform module are firstly applied to estimate current location, dimensions, and orientation of
each surrounding car in each frame in the 3D world coordinate system, followed by a 3D Kalman filter to
predict the location, dimensions, orientation and velocity for each corresponding car in the next time. The
predictions from Kalman filtering are used for re-identifying previously detected cars in the next frame using
the Hungarian algorithm. We conduct experiments on the KITTI benchmark to evaluate tracking performance
and the effectiveness of our method.
1 INTRODUCTION
Multiple object tracking (MOT) is one of the key
roles in computer vision problems. The aim of the
MOT is to predict trajectories and maintain identi-
ties individually in the next frame, given initial po-
sitions and identities of multiple objects from se-
quential frames. The majority of current tracking
methods are detection-based tracking on RGB im-
ages, and wide applications involve many scenarios,
for example, pedestrian surveillance in public (Chen
et al., 2018), (Breitenstein et al., 2011), sport players
tracking in the video (Lu et al., 2013), (Xing et al.,
2011), (Nillius et al., 2006). However, multiple ob-
ject tracking in autonomous driving scenario needs to
involve more information, such as accurate depth in-
formation, for safe navigation and environment per-
ception, as pure visual tracking presents insufficient
information for estimation of surrounding objects’ 3D
locations and motions, which is important to traf-
fic scene understanding for the autonomous vehicle
(Koci
´
c et al., 2018).
In order to sense surrounding objects in autonomous
system, many kinds of sensors are utilized to obtain
information of whereabouts, such as lidar, kinds of
cameras, etc. Visual sensors (e.g. monocular cam-
era, stereo camera, RGB-D camera) can indicate a
large number of color information from environment.
Some application examples include object detection
in image domain (Girshick, 2015) (Redmon et al.,
2016), traffic sign recognition (Luo et al., 2018) and
other applications. While lidar is able to provide pre-
cise 3D laser scan to generate point clouds for 3D
representation of the environment. Although the dis-
advantage of highly cost, it can provide precise dis-
tance information and is normally used to create high-
resolution maps with applications of SLAM for nav-
igation (Durrant-Whyte and Bailey, 2006) and object
detection for 3D detection in point clouds domain
(Zhou and Tuzel, 2017) in autonomous system. Con-
sidering that camera takes advantage of obtain color
information, while lidar sensor has high accuracy of
distance information without color data, the data fu-
sion problem combining lidar with camera has be-
come increasingly popular recently in applications of
3D object (cars, pedestrians, cyclists) detection with
orientation estimation, 3D object tracking for traffic
scene understanding. Meanwhile information from
GPS/IMU will support ego-car to estimate self pose
and attitude for tracking objects in the world space.
312
Chen, C., Fragonara, L. and Tsourdos, A.
3D Car Tracking using Fused Data in Traffic Scenes for Autonomous Vehicle.
DOI: 10.5220/0007674203120318
In Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2019), pages 312-318
ISBN: 978-989-758-374-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Driven by the applications in autonomous driving sce-
nario and advantages of kinds of sensors for percep-
tion, many solutions are proposed for 3D object de-
tection based on multiple sensory data in robotics
and autonomous scenario for environment perception.
(Chen et al., 2017), (Ku et al., 2017) show state of art
3D detection performance based on camera images
and lidar point clouds data. However few works are
presented for 3D objects tracking in traffic scene due
to the open issues of understanding of complex traffic
environment, precise data fusion and 3D object de-
tection from multiple sensors, motion estimation for
each traffic participator.
2 RELATED WORK
According to different criteria, multiple object track-
ing problem can be categorized to different sets(Luo
et al., 2014). For example, depending on target initial-
ization, tracking methods are grouped in detection-
based and detection-free tracking. Detection-based
tracking applies trained object detector to each frame
to obtain the location and appearance of each object in
advance, then tracking model links locations to trajec-
tories for the same object from the sequence (Berclaz
et al., 2011), (Breitenstein et al., 2009), (Ess et al.,
2009). Detection-free tracking needs to initialize the
positions of the respective targets manually in the first
frame, then the tracking model will track the given
targets in the sequence according to targets appear-
ance (Hu et al., 2012), (Zhang and van der Maaten,
2013). MOT can also be classified in online track-
ing and offline tracking. The difference is that online
tracking does not leverage observations from future
sequence (Hong et al., 2015), (Choi et al., 2017), (Hu
et al., 2012), while offline tracking utilizes a batch of
frames or the whole sequence as input before tracking
(Yang et al., 2011), (Brendel et al., 2011).
For instance, in the 2D image MOT domain, (Xiang
et al., 2015) considers the MOT problem as a Markov
Decision Process (MDP) that leverages reinforcement
learning approach to learn a policy to realize the data
association. (Choi, 2015) introduced an aggregated
local flow descriptor for similarity measurement, the
descriptor encodes the relative motion pattern in the
2D bounding box from each frame for data associa-
tion, which will be combined with object dynamics,
appearance similarity and regularization of long-term
trajectories to achieve robust tracking.
In the 3D image with depth information MOT do-
main, stereo cameras (Geiger et al., 2010) or time-of-
flight cameras (RGB-D) (Zollh
¨
ofer et al., 2018) are
involved to exploit sparse depth or per-pixel depth in-
formation. (Osep et al., 2017) utilizes the stereo cam-
era to detect cars and pedestrians in the street and es-
timate visual odometry (VO) in advance, then VO is
used for the ego-car’s pose estimation that is impor-
tant to transform objects to world space system whilst
ego-car is also moving. At last, a 2D-3D Kalman fil-
ter combines objects in a 2D image bounding box and
a 3D point cloud bounding box to obtain robust track-
ing performance.
In the lidar-sensor-based 3D MOT domain, the track-
ing process is normally in detection-free mode (De-
quaire et al., 2016), (Dequaire et al., 2018), (Dewan
et al., 2016), (Kaestner et al., 2012), as object de-
tection based on pure point clouds data needs lots of
computation to extract information from 100K point
clouds in traffic scenario, which leads to very slow in-
ference speed. As a result, (Dequaire et al., 2016),
(Dequaire et al., 2018) introduced end-to-end neural
networks to learn object links from raw lidar data, re-
alizing a tracking pipeline without detection process.
In addition, (Dequaire et al., 2016) demonstrated the
end-to-end tracking approach on a moving platform
in a busy traffic environment to track both static and
dynamic objects through occlusion, while (Dequaire
et al., 2018) proposed an end-to-end tracking frame-
work in the totally unsupervised manner.
In the multi-sensors-based 3D tracking domain, (As-
vadi et al., 2016) leveraged multiple sensors (2D im-
age camera, 3D point cloud lidar) to estimate the loca-
tion of cars, pedestrians, and cyclists, then two mean-
shift (Cheng, 1995) methods are applied to 2D images
and 3D point clouds respectively for location estima-
tion of each object. At last, a constant acceleration
Kalman filter is used for tracking both objects’ loca-
tion in the 2D image and 3D point clouds. However,
the tracking method is applied as single-object track-
ing rather than MOT, as the initial position of the ob-
ject need to be given in advance before tracking.
Some researcher leverages semantic segmentation
processing for object detection and tracking (O
ˇ
sep
et al., 2016). They proposed a two-stage segmentation
and scale-stable clustering to detect and track more
generic objects in the complex street scenes instead
of limited categories of objects.
3 METHOD OVERVIEW
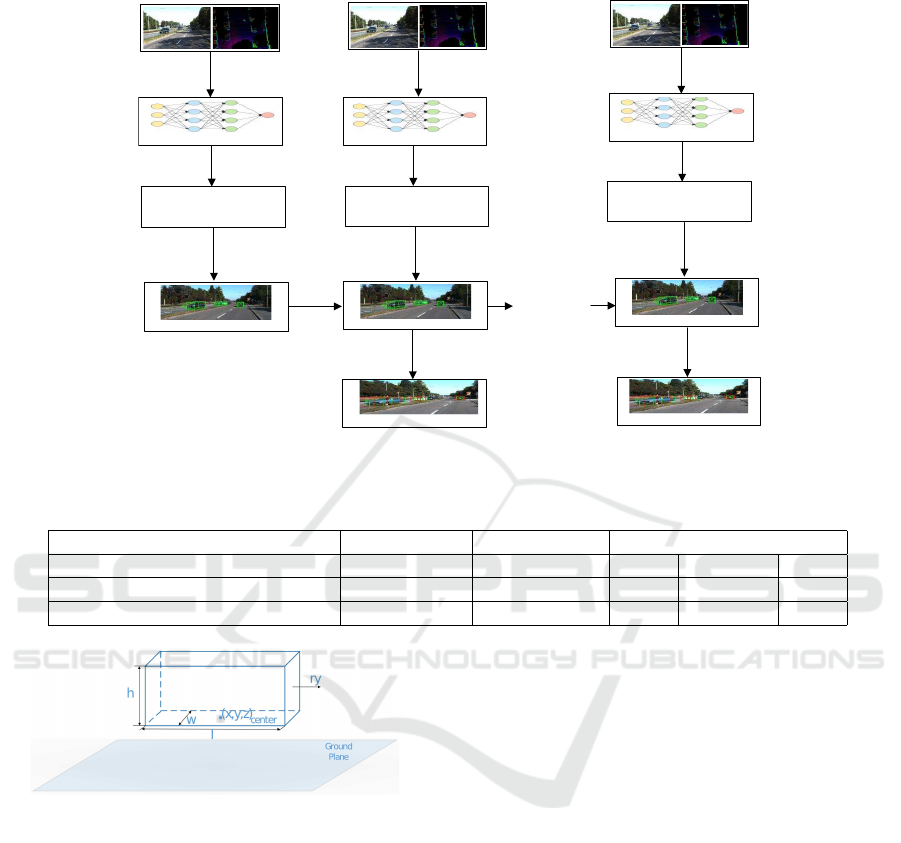
In our work, depicted in Figure 1, we use images,
point clouds and GPS/IMU data from KITTI bench-
mark (Geiger et al., 2012), and take advantage of a
3D object detection model AVOD (Ku et al., 2017) for
accurate 3D car detection, followed by a spatial trans-
former module used to map 3D cars from the camera
3D Car Tracking using Fused Data in Traffic Scenes for Autonomous Vehicle
313

coordinate system to the world coordinate system. At
last, we introduce a 3D Kalman filter to estimate 3D
car trajectories.
3.1 3D Car Detection based on Images
and Point Clouds Data
The proposed 3D car tracking method is a detection-
based and online tracking algorithm, which deeply re-
lies on the performance of the 3D car detector. We
compared previous state-of-the-art models for 3D car
detection in Table 1, and use Aggregate View Object
Detection (AVOD) (Ku et al., 2017) as our 3D car de-
tector. Although VoxelNet achieved higher accuracy
than AVOD, the forward time takes much longer than
AVOD. For purpose of high-resolution feature maps,
the AVOD encodes images and BEV (Bird Eye View)
of point cloud to a modified VGG-16 network (Si-
monyan and Zisserman, 2014) to generate full-sized
feature maps, which are used for estimating the 3D
proposal generation and orientation vector. The de-
tector model is generated by minimizing a multiple
loss that includes a regression task for the 3D bound-
ing box and orientation vector prediction, and a clas-
sification task for the object category.
In our tracking application, the output of the AVOD
network is used as an observation model. The de-
tection results for each frame will provide orienta-
tion ry
3D
img
, length l
3D
img
, width w
3D
img
, height h
3D
img
, center-
point of the bottom [x
3D
img
, y
3D
img
, z
3D
img
] as 3D bounding
box b
3D
img
in the camera space as the current state for
detected car, shown in Figure 2
b
3D
img
= [ry
3D
img
, l
3D
img
, w
3D
img
, h
3D
img
, x
3D
img
, y
3D
img
, z
3D
img
]
T
(1)
3.2 Spatial Transform Module
When an autonomous vehicle is in a static scenario,
which means that the ego-car is in the stationary situ-
ation, the moving cars viewed in the world coordinate
system will be coherent with those viewed in the local
sensor coordinate system, such as camera coordinate
system. However, when tracking dynamic cars from a
moving platform, the egomotion of the sensor on the
autonomous vehicle will affect the relative location
and orientation of the detected cars from the sensors’
perspective. As a result, we develop a spatial trans-
formation module to decouple the egomotion of the
autonomous vehicle from the motion of the detected
cars in the traffic scene.
In order to transform the location and orientation of
the detected cars to the world coordinate system while
the ego-vehicle is moving, we utilize the GPS/IMU
data to estimate the ego-vehicle’s 6 degrees of free-
dom (DoF) pose T
t
t−1
in the IMU coordinate system
(Osborne, 2008), followed by the transformation such
that:
P
world
img
= T
t
t−1
∗ T
imu
img
∗ P
img
(2)
Where P
world
img
is the transformation from the camera
space to the world space, T
t
t−1
is the ego-vehicle’s
pose update from time t −1 to t in the IMU coordinate
system, T
imu
img
is the transformation from camera space
to IMU space, P
img
is the 3D location of detected car
in the camera space.
3.3 3D Constant Acceleration Kalman
Filter
A 3D constant acceleration Kalman filter is used
for robust 3D car tracking, as the constant ac-
celeration assumed will be useful to model tar-
get motion that is smooth in position and ve-
locity changes. The state of vector is defined
as x
world
= [ry, ˙ry, ¨ry, l, w, h, x, ˙x, ¨x, y, ˙y, ¨y, z, ˙z, ¨z]
T
world
in
the world coordinate system, and [ ˙x, ˙y,˙z], [¨x, ¨y,¨z] are the
velocity and the acceleration corresponding to x,y,z
positions respectively. The state model and measure-
ment model of the discrete linear time-invariant sys-
tem are defined by Equations 3 and 4:
x
t
= A · x
t−1
+ w
t−1
(3)
z
t
= C ·x
t
+ v
t
(4)
where t is the time index, A is the state transition
matrix of the process from the state x
t−1
to the state
x
t
, C is the observation matrix that connects the state
vector and the measurement vector, w and v are the
process noise and measurement noise, and they are
all assumed to be mutually independent, zero-mean,
white Gaussian noise, with covariance Q
t
and R
t
re-
spectively. z
t
is the measurement. The problem is to
estimate ˆx
t+1
of x
t+1
for the prediction of cars loca-
tion and orientation, given the detection of cars in the
next frame z
t+1
.
3.4 Data Association
Data association is a typical problem encountered in
MOT task matching the same identities in sequence.
In the last decades, many methods have been pro-
posed for data association, such as the Hungarian al-
gorithm (Kuhn, 1955), the Joint Probabilistic Data
Association (JPDA) (Fortmann et al., 1983), the Mul-
tiple Hypothesis Tracking (MHT) (Reid et al., 1979).
In this paper, we use the Hungarian algorithm in our
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
314
Detection Model
3D Car Bounding Box
t=0
t=1
...
3D Car Bounding Box
t=T
Kalman
Filter
Tracking Result
Data
Association
Tracking Result
Data
Association
...
...
...
...
Image&Lidar
Detection Model
3D Car Bounding Box
Detection Model
Image&Lidar
Image&Lidar
Kalman
Filter
Kalman
Filter
Spatial Transform Module
Spatial Transform Module
Spatial Transform Module
Figure 1: 3D Car Tracking Method Process.
Table 1: Previous State of art 3D Car Detection Networks.
Easy Moderate Hard
Networks Input Data Forward Time AP(%)
AVOD (Ku et al., 2017) Image&Lidar 0.08s 73.59 65.78 58.38
MV3D (Chen et al., 2017) Image&Lidar 0.36s 71.09 62.35 55.12
VoxelNet (Zhou and Tuzel, 2017) Lidar 0.5s 77.47 65.11 57.73
Figure 2: 3D Car Bounding Box.
work as it is a simple, efficient and linear data associ-
ation algorithm that minimizes the total cost of simi-
larity for each observation and hypotheses pair. The
performance of data association is indicated from the
MOT metrics of MOTA and IDS in Table 3.
The pre-fit residual between predicted quantity and
measurement, and the corresponding residual covari-
ance matrix are defined by Equation 5 and 6.
˜y
k
= z
k
−C
k
ˆx
k|k−1
(5)
S
k
= R
k
+C
k
P
k|k−1
C
T
k
(6)
where P is the predicted state error covariance matrix.
Considering the distance of state vector between mea-
surement and prediction satisfies Gaussian distribu-
tion with mean of ˜y
k
and covariance of S
k
, the prob-
ability of which is defined as distance measure d
i j
from each tracking target state vector to measure-
ment. Then we apply the Hungarian algorithm (Kuhn,
1955), which can find an optimal assignment solution
using a cost matrix, and solving the matching problem
by minimizing the total cost E of Equation 7.
E =
N
∑
i
N
∑
j
M
i j
d
i j
(7)
where M is a permutation matrix that determines the
total cost, N is the greater dimension of distance ma-
trix. It is worth noting that the distance matrix d will
be padded by 0 if it is not satisfied with square matrix.
4 EXPERIMENTAL RESULTS
In this section, we will apply our proposed tracking
method to the training dataset from the KITTI track-
ing benchmark (Geiger et al., 2013). The dataset
is captured from a VW station wagon equipped
with 2 high-resolution color stereo-cameras, 2 high-
resolution gray stereo-cameras, 1 Velodyne HDL-64E
3D Car Tracking using Fused Data in Traffic Scenes for Autonomous Vehicle
315

rotating 3D laser scanner, 1 GPS/IMU navigation sys-
tem. We extracted training sequences with ground
truth of detections for cars in 2D RGB images and 3D
point clouds from the dataset for evaluation. As the
ground truth of the testing dataset is not available, we
used a cross-validation method and split 7 sequences
from a total of 21 training tracking sequences.
Evaluation policy is based on the CLEAR MOT met-
rics (Bernardin and Stiefelhagen, 2008). The perfor-
mance metrics includes MOT precision (MOTP) indi-
cating averaged total error of distance between the ob-
ject and its corresponding matched object-hypothesis
for all frames, MOT accuracy (MOTA) indicating to-
tal tracking accuracy for all frames. Besides, (Li
et al., 2009) introduced other metrics, such as mostly
tracked (MT), partly tracked (PL), mostly lost (ML),
identity switches (IDS) indicating changing number
of matched ground truth identity, fragmentations (FR)
indicating the number of interrupted matched objects,
MODA presents multiple object detection accuracy.
4.1 3D Car Detection Result
The 3D car detection AVOD model is trained based
on KITTI dataset on an NVIDIA 1080Ti GPU, and
the results are evaluated on the validation dataset us-
ing the 3D bounding box IOU, BEV AP (Average Pre-
cision) and global orientation angle. The best results
are shown in Table 2, which are similar to the offi-
cial results. The slight difference is normal due to the
random dropout and random values of initial filters
during training. Figure 3 presents several qualitative
car detection results in 3D bounding box.
Table 2: Car Detection Average Precision (AP) of AVOD.
Easy Moderate Hard
AP
3D
(%)
Official 73.59 65.78 58.38
Ours 72.33 64.87 64.97
AP
BEV
(%)
Official 86.80 85.44 77.73
Ours 86.18 77.98 78.05
4.2 3D Car Tracking Result
A clear advantage of Kalman filter can be seen in Ta-
ble 3 when we track cars in the 3D bounding box in
the world space, the visualization of the result is pre-
sented after transforming the location and rotation of
the cars from world space to image coordinate sys-
tem. It indicates that the tracking accuracy varies with
the detection performance. In Figure 4, the green 3D
bounding boxes with an arrow are detected cars, and
the red bounding boxes are the predicted result from
the Kalman filter from the previous frame.
Figure 3: Car Detection Result.
Figure 4: 3D Car Tracking Result.
5 CONCLUSIONS
In this paper, we presented a 3D dynamic car tracking
method in the dynamic traffic scene on the moving
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
316
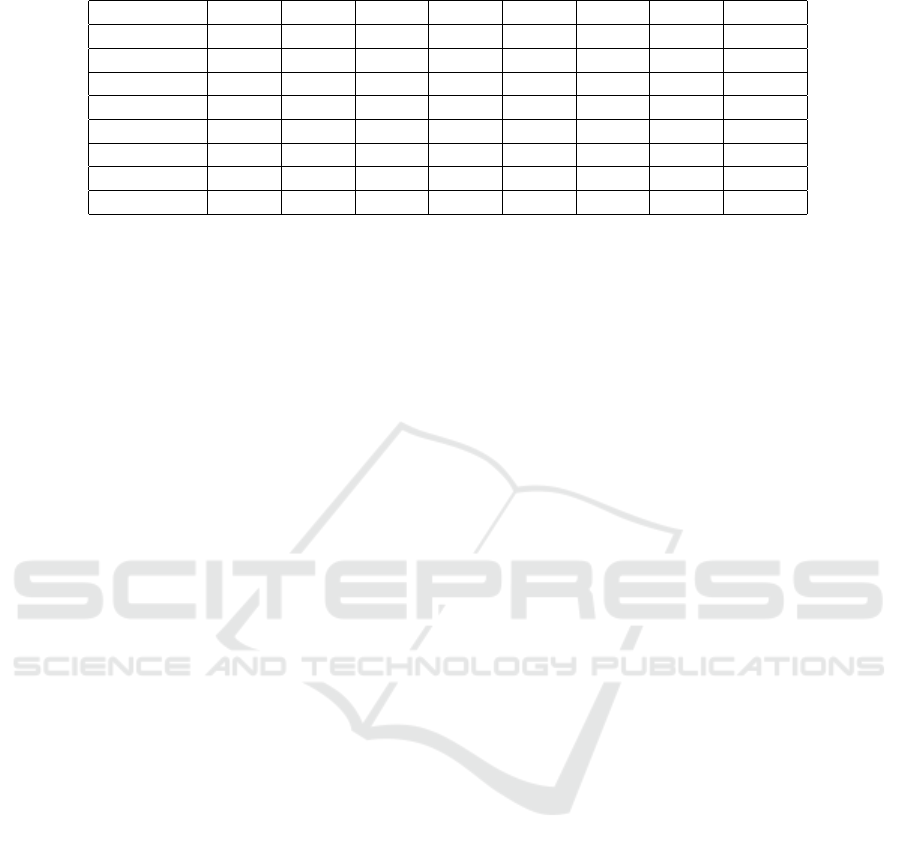
Table 3: 3D Car Tracking Result from Sequences from 0001 to 0007.
Seq01 Seq02 Seq03 Seq04 Seq05 Seq06 Seq07 Overall
MODA (%) 59.46 38.90 73.65 57.16 69.60 85.20 77.73 65.77
MOTA (%) 58.83 39.90 73.35 56.51 69.02 85.20 77.38 65.38
MOTP (%) 83.75 75.31 79.22 75.95 83.81 74.14 84.24 81.34
IDS 7 0 1 5 7 0 7 27
Frag 31 17 14 38 32 8 42 182
MT (%) 42.31 26.67 50.00 19.23 36.36 72.73 77.36 48.48
PT (%) 30.77 53.33 50.00 69.23 57.58 27.27 22.64 40.40
ML (%) 26.92 20.00 0.0 11.54 6.06 0.0 0.0 11.11
ego-car. Firstly we utilized a state of art car detector
AVOD to detect 3D cars from fused 2D RGB images
and its corresponding point clouds data, then a spatial
transform module maps the location and orientation
of detected car from camera space to world coordinate
system due to the effect of egomotion of the moving
platform. At last, a constant acceleration Kalman fil-
ter was applied to estimate the state of dynamic cars
in the world space for a smooth trajectory in the next
frame. However, we noticed that the estimated track-
ing bounding boxes are disturbed significantly by the
false rotation of the car that detected by the AVOD,
and our future work will focus on improvement of ro-
tation estimation of cars.
ACKNOWLEDGEMENTS
We thank all the reviewers for the comments and sug-
gestions. This research is part of the HumanDrive
project, funded by InnovateUK (Project ref: 103283)
in the framework of the CAV2 call.
REFERENCES
Asvadi, A., Girao, P., Peixoto, P., and Nunes, U. (2016). 3d
object tracking using rgb and lidar data. In Intelligent
Transportation Systems (ITSC), 2016 IEEE 19th In-
ternational Conference on, pages 1255–1260. IEEE.
Berclaz, J., Fleuret, F., Turetken, E., and Fua, P. (2011).
Multiple object tracking using k-shortest paths opti-
mization. IEEE transactions on pattern analysis and
machine intelligence, 33(9):1806–1819.
Bernardin, K. and Stiefelhagen, R. (2008). Evaluating mul-
tiple object tracking performance: the clear mot met-
rics. Journal on Image and Video Processing, 2008:1.
Breitenstein, M. D., Reichlin, F., Leibe, B., Koller-Meier,
E., and Van Gool, L. (2009). Robust tracking-by-
detection using a detector confidence particle filter. In
Computer Vision, 2009 IEEE 12th International Con-
ference on, pages 1515–1522. IEEE.
Breitenstein, M. D., Reichlin, F., Leibe, B., Koller-Meier,
E., and Van Gool, L. (2011). Online multiper-
son tracking-by-detection from a single, uncalibrated
camera. IEEE transactions on pattern analysis and
machine intelligence, 33(9):1820–1833.
Brendel, W., Amer, M., and Todorovic, S. (2011). Multi-
object tracking as maximum weight independent set.
In Computer Vision and Pattern Recognition (CVPR),
2011 IEEE Conference on, pages 1273–1280. IEEE.
Chen, L., Ai, H., Zhuang, Z., and Shang, C. (2018). Real-
time multiple people tracking with deeply learned
candidate selection and person re-identification. In
2018 IEEE International Conference on Multimedia
and Expo (ICME), pages 1–6. IEEE.
Chen, X., Ma, H., Wan, J., Li, B., and Xia, T. (2017). Multi-
view 3d object detection network for autonomous
driving. In IEEE CVPR, volume 1, page 3.
Cheng, Y. (1995). Mean shift, mode seeking, and clustering.
IEEE transactions on pattern analysis and machine
intelligence, 17(8):790–799.
Choi, J., Kwon, J., and Lee, K. M. (2017). Visual track-
ing by reinforced decision making. arXiv preprint
arXiv:1702.06291.
Choi, W. (2015). Near-online multi-target tracking with
aggregated local flow descriptor. In Proceedings of
the IEEE international conference on computer vi-
sion, pages 3029–3037.
Dequaire, J., Ondr
´
u
ˇ
ska, P., Rao, D., Wang, D., and Posner,
I. (2018). Deep tracking in the wild: End-to-end track-
ing using recurrent neural networks. The International
Journal of Robotics Research, 37(4-5):492–512.
Dequaire, J., Rao, D., Ondruska, P., Wang, D., and Pos-
ner, I. (2016). Deep tracking on the move: learning to
track the world from a moving vehicle using recurrent
neural networks. arXiv preprint arXiv:1609.09365.
Dewan, A., Caselitz, T., Tipaldi, G. D., and Burgard, W.
(2016). Motion-based detection and tracking in 3d li-
dar scans. In Robotics and Automation (ICRA), 2016
IEEE International Conference on, pages 4508–4513.
IEEE.
Durrant-Whyte, H. and Bailey, T. (2006). Simultaneous lo-
calization and mapping (slam): Part i the essential al-
gorithms. robotics and automation magazine 13 (2):
99–110. doi: 10.1109/mra. 2006.1638022. Technical
report, Retrieved 2008-04-08.
Ess, A., Leibe, B., Schindler, K., and Van Gool, L. (2009).
Robust multiperson tracking from a mobile platform.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 31(10):1831–1846.
3D Car Tracking using Fused Data in Traffic Scenes for Autonomous Vehicle
317

Fortmann, T., Bar-Shalom, Y., and Scheffe, M. (1983).
Sonar tracking of multiple targets using joint proba-
bilistic data association. IEEE journal of Oceanic En-
gineering, 8(3):173–184.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. The Inter-
national Journal of Robotics Research, 32(11):1231–
1237.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the kitti vision benchmark
suite. In Conference on Computer Vision and Pattern
Recognition (CVPR).
Geiger, A., Roser, M., and Urtasun, R. (2010). Efficient
large-scale stereo matching. In Computer Vision–
ACCV 2010, pages 25–38. Springer.
Girshick, R. (2015). Fast r-cnn. In Proceedings of the IEEE
international conference on computer vision, pages
1440–1448.
Hong, S., You, T., Kwak, S., and Han, B. (2015). Online
tracking by learning discriminative saliency map with
convolutional neural network. In International Con-
ference on Machine Learning, pages 597–606.
Hu, W., Li, X., Luo, W., Zhang, X., Maybank, S.,
and Zhang, Z. (2012). Single and multiple object
tracking using log-euclidean riemannian subspace and
block-division appearance model. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
34(12):2420–2440.
Kaestner, R., Maye, J., Pilat, Y., and Siegwart, R. (2012).
Generative object detection and tracking in 3d range
data. In Robotics and Automation (ICRA), 2012
IEEE International Conference on, pages 3075–3081.
IEEE.
Koci
´
c, J., Jovi
ˇ
ci
´
c, N., and Drndarevi
´
c, V. (2018). Sensors
and sensor fusion in autonomous vehicles. In 2018
26th Telecommunications Forum (TELFOR), pages
420–425. IEEE.
Ku, J., Mozifian, M., Lee, J., Harakeh, A., and Waslan-
der, S. (2017). Joint 3d proposal generation and ob-
ject detection from view aggregation. arXiv preprint
arXiv:1712.02294.
Kuhn, H. W. (1955). The hungarian method for the as-
signment problem. Naval research logistics quarterly,
2(1-2):83–97.
Li, Y., Huang, C., and Nevatia, R. (2009). Learning to asso-
ciate: Hybridboosted multi-target tracker for crowded
scene.
Lu, W.-L., Ting, J.-A., Little, J. J., and Murphy, K. P.
(2013). Learning to track and identify players from
broadcast sports videos. IEEE transactions on pattern
analysis and machine intelligence, 35(7):1704–1716.
Luo, H., Yang, Y., Tong, B., Wu, F., and Fan, B. (2018).
Traffic sign recognition using a multi-task convolu-
tional neural network. IEEE Transactions on Intel-
ligent Transportation Systems, 19(4):1100–1111.
Luo, W., Xing, J., Milan, A., Zhang, X., Liu, W., Zhao, X.,
and Kim, T.-K. (2014). Multiple object tracking: A
literature review. arXiv preprint arXiv:1409.7618.
Nillius, P., Sullivan, J., and Carlsson, S. (2006). Multi-target
tracking-linking identities using bayesian network in-
ference. In null, pages 2187–2194. IEEE.
Osborne, P. (2008). The mercator projections.
O
ˇ
sep, A., Hermans, A., Engelmann, F., Klostermann, D.,
Mathias, M., and Leibe, B. (2016). Multi-scale object
candidates for generic object tracking in street scenes.
In Robotics and automation (icra), 2016 ieee interna-
tional conference on, pages 3180–3187. IEEE.
Osep, A., Mehner, W., Mathias, M., and Leibe, B. (2017).
Combined image-and world-space tracking in traffic
scenes. In Robotics and Automation (ICRA), 2017
IEEE International Conference on, pages 1988–1995.
IEEE.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 779–
788.
Reid, D. et al. (1979). An algorithm for tracking multi-
ple targets. IEEE transactions on Automatic Control,
24(6):843–854.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Xiang, Y., Alahi, A., and Savarese, S. (2015). Learning to
track: Online multi-object tracking by decision mak-
ing. In Proceedings of the IEEE international confer-
ence on computer vision, pages 4705–4713.
Xing, J., Ai, H., Liu, L., and Lao, S. (2011). Multiple
player tracking in sports video: A dual-mode two-way
bayesian inference approach with progressive obser-
vation modeling. IEEE Transactions on Image Pro-
cessing, 20(6):1652–1667.
Yang, B., Huang, C., and Nevatia, R. (2011). Learning
affinities and dependencies for multi-target tracking
using a crf model. In Computer Vision and Pat-
tern Recognition (CVPR), 2011 IEEE Conference on,
pages 1233–1240. IEEE.
Zhang, L. and van der Maaten, L. (2013). Structure pre-
serving object tracking. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 1838–1845.
Zhou, Y. and Tuzel, O. (2017). Voxelnet: End-to-end learn-
ing for point cloud based 3d object detection. arXiv
preprint arXiv:1711.06396.
Zollh
¨
ofer, M., Stotko, P., G
¨
orlitz, A., Theobalt, C., Nießner,
M., Klein, R., and Kolb, A. (2018). State of the art on
3d reconstruction with rgb-d cameras. In Computer
Graphics Forum, volume 37, pages 625–652. Wiley
Online Library.
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
318
