
Cooperative Driving in Mixed Traffic with Heterogeneous
Communications and Cloud Infrastructure
Rico Auerswald
1 a
, Roman Busse
2
, Markus Dod
3 b
, Richard Fritzsche
1
, Alexander Jungmann
2
,
Michael Kl
¨
oppel-Gersdorf
1 c
, Josef F. Krems
4
, Sven Lorenz
3 d
, Franziska Schmalfuß
4
,
Sabine Springer
4
and Severin Strobl
1 e
1
Fraunhofer IVI, Fraunhofer Institute for Transportation and Infrastructure Systems, Dresden, Germany
2
IAV GmbH, Chemnitz, Germany
3
Mugler AG, Oberlungwitz, Germany
4
Chemnitz University of Technology, Cognitive and Engineering Psychology, Chemnitz, Germany
Keywords:
Cooperative Driving, Mixed Traffic, Hybrid Communication, HMI Design, Modular System Concept,
ITS-G5, C-V2X, Cloud Computing.
Abstract:
In this paper we introduce an Intelligent Transport System (ITS), designed for enabling cooperative driving
manoeuvres in mixed traffic scenarios considering heterogeneous communications and cloud infrastructure
systems. We present an architecture that enables connected vehicles to access ITS services independent of
their underlying communication technology. This is achieved by introducing a large scale communication
system including the road-side infrastructure as well as a heterogeneous cloud. We present insights from the
Automated Connected Vehicle (ACV) concept and examine human factors elaborating on the experience of
two aspects: driving in an ACV as well as driving in a Non-Automated Connected Vehicle (NACV), interacting
with an ACV. Furthermore, we present insights of initial demonstrations, emphasizing that the system works
well in real traffic scenarios.
1 INTRODUCTION
Automated driving is in the focus of recent research
and development activities in the ITS community, but
also highly present in the media, especially w.r.t. its
target expansion: fully autonomous vehicles. Modern
communication technologies are seen as one of the
main enabler for realizing safety, comfort, and eco-
nomic goals, especially in more complex urban traf-
fic scenarios (Hobert et al., 2015). Since the intro-
duction of automated driving is going to be a grad-
ual process, the majority of the vehicles will not
be equipped with automation technology for several
years. Especially for such mixed traffic scenarios,
inter-vehicle communication is crucial for a seamless
a
https://orcid.org/0000-0002-5716-7069
b
https://orcid.org/0000-0003-1084-6088
c
https://orcid.org/0000-0001-9382-3062
d
https://orcid.org/0000-0002-7399-163X
e
https://orcid.org/0000-0002-1636-5368
integration of automated vehicles. On the one hand
inter-vehicle communication in combination with ad-
vanced Human-Machine-Interfaces (HMIs) can sup-
port human drivers in conventional cars by under-
standing the behaviour of automated vehicles, which
can differ from conventional driving behaviours in
specific situations. On the other hand, communica-
tion could also help the automated vehicle to react
on human driven cars more sensible and foresighted
(Zhang, 2018). In addition to improving acceptance
for Automated Connected Vehicle (ACV), commu-
nication also supports cooperative manoeuvres be-
tween ACV and Non-Automated Connected Vehicle
(NACV), which can help to avoid critical situations
and unnecessary congestions that arise in everyday
traffic.
In order to support vehicles and human drivers in
their decision process, the infrastructure plays a ma-
jor role, e.g., to give neutral recommendations to par-
ticular vehicles or groups of vehicles. While the ad-
vantage of communication is undisputed, the choice
Auerswald, R., Busse, R., Dod, M., Fritzsche, R., Jungmann, A., Klöppel-Gersdorf, M., Krems, J., Lorenz, S., Schmalfuß, F., Springer, S. and Strobl, S.
Cooperative Driving in Mixed Traffic with Heterogeneous Communications and Cloud Infrastructure.
DOI: 10.5220/0007682900950105
In Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2019), pages 95-105
ISBN: 978-989-758-374-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
95
of the actual technology is subject to lively discus-
sions and a clear prospect of a preferred technology
exchanging ITS information is missing. Protocols
and messages designed for exchanging information
among vehicles as well as among vehicles and the in-
frastructure are based on direct communication (Fes-
tag, 2014). While there is a competitive situation
for direct Vehicle-to-Everything (V2X) communica-
tion technologies between IEEE 802.11p and Cellular
V2X (C-V2X), conventional cellular is already imple-
mented in about one third of today’s vehicles (Statista,
2018). Hence, some researchers (Hameed Mir and Fi-
lali, 2014; Cecchini et al., 2017) see advantages in us-
ing current cellular systems, at least for a transition
period.
In this work, we focus on cooperative manoeuvres
among ACVs and NACVs supporting heterogeneous
communication technologies as well as a heteroge-
neous cloud infrastructure.
This paper is structured as follows: First we
present the system concept by introducing the over-
all architecture as well as an exemplary use case. We
give more insights in Sections 3, 4, and 5, by pre-
senting the communications system, the infrastruc-
ture and the vehicle side, respectively. We show an
overview of a first live demonstration in Section 6,
before we conclude the work in Section 7.
2 SYSTEM CONCEPT
In the presented system setup, three major compo-
nents are considered: the vehicle, the infrastructure,
and the communication system. The latter connects
vehicles with each other as well as the vehicles with
the infrastructure. The unique feature of the sys-
tem concept is the integration of heterogeneity w.r.t.
all three components. On the vehicle side, ACVs
and NACVs are considered, while for the infrastruc-
ture side a cloud at the Road-Side Units (RSUs) as
well as a central cloud is taken into account. The
exchange of ITS messages is based on either di-
rect Device-to-Device (D2D) communications (e.g.
802.11p, C-V2X), or cellular uplink/downlink com-
munications.
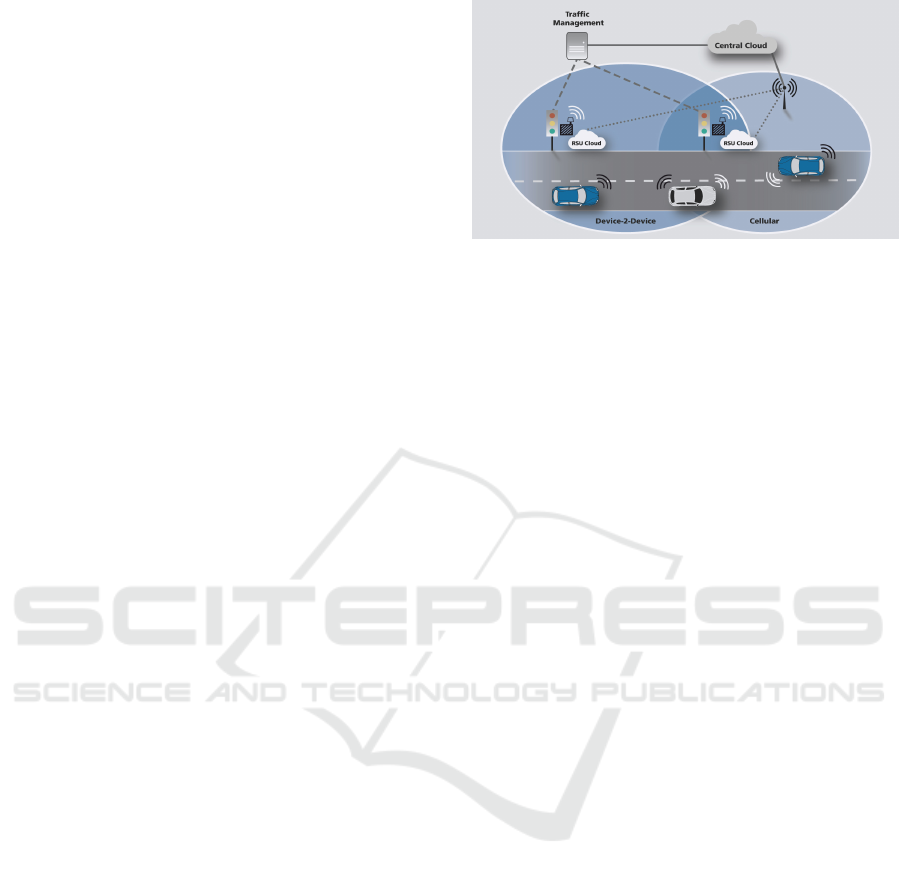
2.1 Architecture
The overall architecture is illustrated in Figure 1. On
the vehicle side the ACV (blue) can execute its ma-
noeuvres fully automated, while it might be beneficial
to inform the passenger about driving decisions. On
the other side, the driver of the NACV (grey) should
be informed about manoeuvres of the ACV, especially
Figure 1: Overall system architecture.
about those not typical for conventional traffic situa-
tions. The cooperation of ACV and NACV is of spe-
cial interest in this work. A specific use case is de-
scribed in more detail in the next section.
All vehicles, independent of their degree of au-
tomation, can be equipped either with direct commu-
nication units or with both, direct and cellular com-
munication units. Note, that vehicles equipped with
D2D units only, are not considered in this work (cellu-
lar is typically assumed for connectivity to the public
key infrastructure as well as the central cloud).
The vehicles are not just communicating with
each other, but also with the infrastructure in order to
obtain information about, e.g., traffic light phases or
receive support for driving decisions. The heteroge-
neously equipped vehicles are supported by a hetero-
geneous infrastructure. Hence, services provided by
the RSU clouds via direct D2D communication can
also be provided by the central cloud via cellular com-
munication. Moreover, the communication among
vehicles is supported by a geographical messaging
service, which allows distributing messages via the
cellular uplink-downlink in a particular region.
2.2 Use Cases
While a number of cooperative driving use cases are
discussed in the ITS community, we only consider a
selected subset of manouvres as shown in Figure 2.
For the remainder of this section, we focus on the
cooperative turn as an example, as it makes use of a
broad set of architectural features. The scenario con-
sists of an intersection, potentially equipped with traf-
fic lights, while the two main actors are an NACV
(grey vehicle) and an ACV (blue vehicle), both ap-
proaching the intersection from opposite directions.
The traffic light is passed based on Green-Light Op-
timized Speed Advisory (GLOSA) (Kloeppel et al.,
2019). At the intersection, the NACV intends to turn
left, but needs to wait for the ACV. We assume that
there are other vehicles behind both cars (dark grey
vehicles), which makes the situation more relevant,
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
96
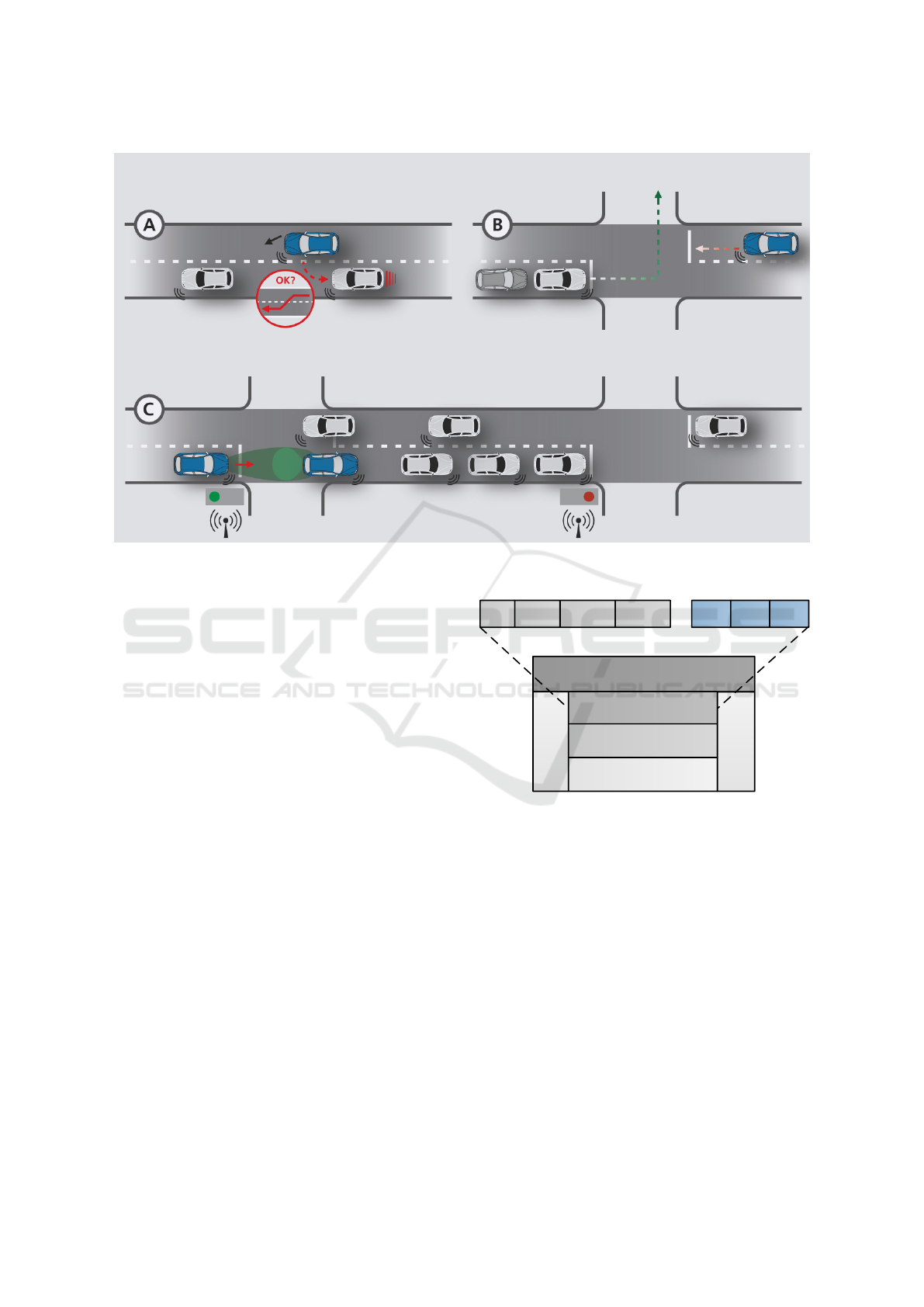
Figure 2: Example use cases of automated and connected driving: (A) cooperative lane change manoeuvres, (B) cooperative
turn, (C) predictive intersection crossing and traffic light approaching for blocked flow-offs.
due to a noticeable delay for the NACV and all fol-
lowing vehicles.
In order to avoid a blocking, the ACV can coop-
erate by giving up its right of way. Based on com-
munication between the two vehicles but also with
support from the infrastructure, the NACV recognizes
the ACV’s willingness to cooperate and passes the
crossing. For that purpose, we introduce two new
message types. The Maneuver Coordination Message
(MCM) is transmitted form vehicles in order to in-
form about planed and ongoing manoeuvres but also
request manoeuvres from other vehicles. The mes-
sage is currently studied in ETSI ITS standardization,
where several approaches are discussed. Based on
the MCM, we introduce the Maneuver Recommen-
dation Message (MRM), sent out from the infrastruc-
ture side, in order to support vehicles in their driving
decisions.
Based on the cooperative turn, the mean delay
(w.r.t. all involved vehicles) is assumed to be reduced
substantially. Hence, with a large penetration of co-
operatively behaving vehicles, traffic flow can be in-
creased. In the following sections, we show how the
cooperative turn can be implemented in a practical
system, incorporating heterogeneous communication
and cloud technologies.
CAM
ITS Applica�ons
DENM SPATEM MAPEM CPM MCM MRM
...
ITS Facili�es
Transport & Network
Access Technologies
Security
Management
Figure 3: ITS communication stack.
3 COMMUNICATIONS
Information exchange among vehicles but also among
vehicles and the infrastructure is subject to standard-
isation activities at several international committees,
e.g., ETSI, IEEE or SAE. A common view on com-
munications in ITS is given by the principle stack de-
sign, illustrated in Figure 3. In this paper, the focus
w.r.t. communications is on ITS facilities messages
as well as on access technologies. The messages uti-
lized in this paper are based on ETSI ITS-G5, see,
e.g., (ETSI EN 302 637-2 V1.3.2 (2014-11), 2014).
Even though ITS facilities have been primarily
designed assuming IEEE 802.11p as access technol-
ogy, the protocol layer is reused for C-V2X and is
Cooperative Driving in Mixed Traffic with Heterogeneous Communications and Cloud Infrastructure
97

also discussed for cellular-based data exchange, e.g.,
at 5GAA (5GAA, 2018). Note that for transport
and network layer we assume Basic Transport Proto-
col (BTP) (ETSI EN 302 636-5-1 V2.1.1 (2017-08),
2017) plus geo-networking (ETSI EN 302 636-4-1
V1.3.2 (2017-08), 2017) for D2D, and TCP/IP with
geo-based addressing for cellular communications.
3.1 ITS Facilities Messages
Basic messages of ETSI ITS facilities have been used
for enabling day 1 and day 1.5 use cases (C-ITS Plat-
form, 2016). Such messages are, e.g., the Coopera-
tive Awareness Message (CAM), Decentralized En-
vironmental Notification Message (DENM), Signal,
Phase and Timing Extended Message (SPATEM) and
the Map Extended Message (MAPEM). On top of the
basic set, we integrate advanced messages, currently
under investigation and subject to an ongoing stan-
dardization process in ETSI ITS. The Collective Per-
ception Message (CPM) enables to transmit dynamic
object information gathered from sensors located in
the vehicle or at the infrastructure side.
For realizing cooperative manoeuvres, however, a
more dedicated information exchange needs to be es-
tablished. For this reason, MCM and MRM have been
designed and integrated into the system. Both for-
mats are used for realising the cooperative turn. Even
though the details of the message format are beyond
the scope of this paper, the basic idea and message
flow is explained in the following.
The NACV sends out an MCM with its short-term
route information (based on the navigation system)
and the intention to turn left (based on the turn-left
signal). Note, that the route information is optional.
The ACV recognizes the intention of the NACV by
receiving a MCM. Moreover, it receives a CPM from
the infrastructure, informing about the overall traf-
fic situation. This might include non-connected road
users, detected by road-side sensors. The blue vehicle
realises the overall gain of cooperation and decides
to let the NACV pass. In order to inform the NACV
about this decision, the ACV sends an MCM includ-
ing two main information. First, the ACV’s ego in-
tention of decelerating a certain amount (for letting
the NACV pass) and secondly a request to the NACV
to pass the intersection in a certain time.
In addition to that, the infrastructure can support
both vehicles. As a basic service, the infrastructure
is sending out SPATEM and MAPEM in order to let
both vehicles perform GLOSA. On top of that, the
MRM is utilized to support both, the ACV and the
NACV. The ACV can receive the recommendation to
initiate a cooperative turn, while the NACV can re-
ceive a recommendation to cooperate with ACV and
pass the intersection as requested. The concept of
MCM and MRM presented in this paper includes the
possibility to communicate a cause of an intention, re-
quest or recommendation. One of the various causes
can be a reference on another intention, request, or
recommendation. Based on this concept, unambigu-
ous coordination is possible.
3.2 Access Technologies
Access technologies for communication in ITS is a
well-studied field for several years. However, the
right choice of technology is still subject of current
discussions.
3.2.1 Direct Communication
The development of a direct Vehicle-to-Vehicle
(V2V) communication technology has been moti-
vated by the independence of the availability of a
managed infrastructure, like the cellular system. On
that basis, the direct communication system IEEE
802.11p has been standardized, which supports higher
vehicle speeds, works without any initialization pro-
cedures and is based on broadcasting information to-
wards road users in the surrounding. While the IEEE
802.11p is available for several years, an alternative
standard for V2X communication has been developed
and integrated into the 3GPP standard. It allows ex-
changing information directly among road users, sim-
ilar to IEEE 802.11p, but based on the cellular frame
structure. Hence, it is also referred to as C-V2X. The
two direct communication systems are in a competing
situation, while it is not clear at the moment which
technology is going to be used in which region, or if
a coexistence of both technologies is realistic.
In the presented system architecture both direct
access technologies are integrated, i.e., ITS messages
can be transmitted via 802.11p, C-V2X, or both. Note
that it is technically not possible to receive a message
via C-V2X, which has been send via 802.11p and vice
versa. However, if differently equipped vehicles are in
the surrounding, ITS-messages need to be transmitted
via cellular in parallel. For such situations, the in-
frastructure supports to achieve that vehicles with dif-
ferent direct communication technologies recognize
each other.
3.2.2 Cellular Communication
Even though direct communication clearly has its ad-
vantages, e.g., in an efficient spectrum usage and
lower latencies, the penetration of vehicles equipped
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
98
with this technology in real traffic tends to zero. Al-
though several car manufacturers announced an inte-
gration of 802.11p or C-V2X in series-production ve-
hicles starting in 2019, the penetration rate will stay
low for several years. However, the number of cars,
equipped with cellular is markedly higher. Even with-
out cellular integrated in a vehicle itself, an upgrade
(e.g., cellular based HMI) is less costly compared to
today’s available direct-2-device units.
The presented architecture allows interaction
among vehicles and traffic infrastructure independent
of the used communication technology. Messages can
either been forwarded via geo-based addressing (Ge-
oMessaging) or infrastructure services can be utilized
via the central cloud.
4 INFRASTRUCTURE
Beside the communication among vehicles itself, a
key aspect are the ITS services provided by the in-
frastructure. In the presented system, we extend basic
infrastructure-services (e.g., via SPATEM) by collec-
tive perception service via CPM as well as recommen-
dations via MRM in order to support cooperative ma-
noeuvres and foresighted driving. Due to the hetero-
geneous communication technologies also a heteroge-
neous cloud infrastructure is established for providing
services for both, vehicles equipped with direct com-
munication and those equipped with cellular. While
direct communication based services can be provided
by the RSU cloud, cellular users primarily refer to the
central cloud. Note that RSU cloud usage is also pos-
sible for cellular users via geo-messaging. For the fol-
lowing discussions cellular means Long Term Evolu-
tion (LTE).
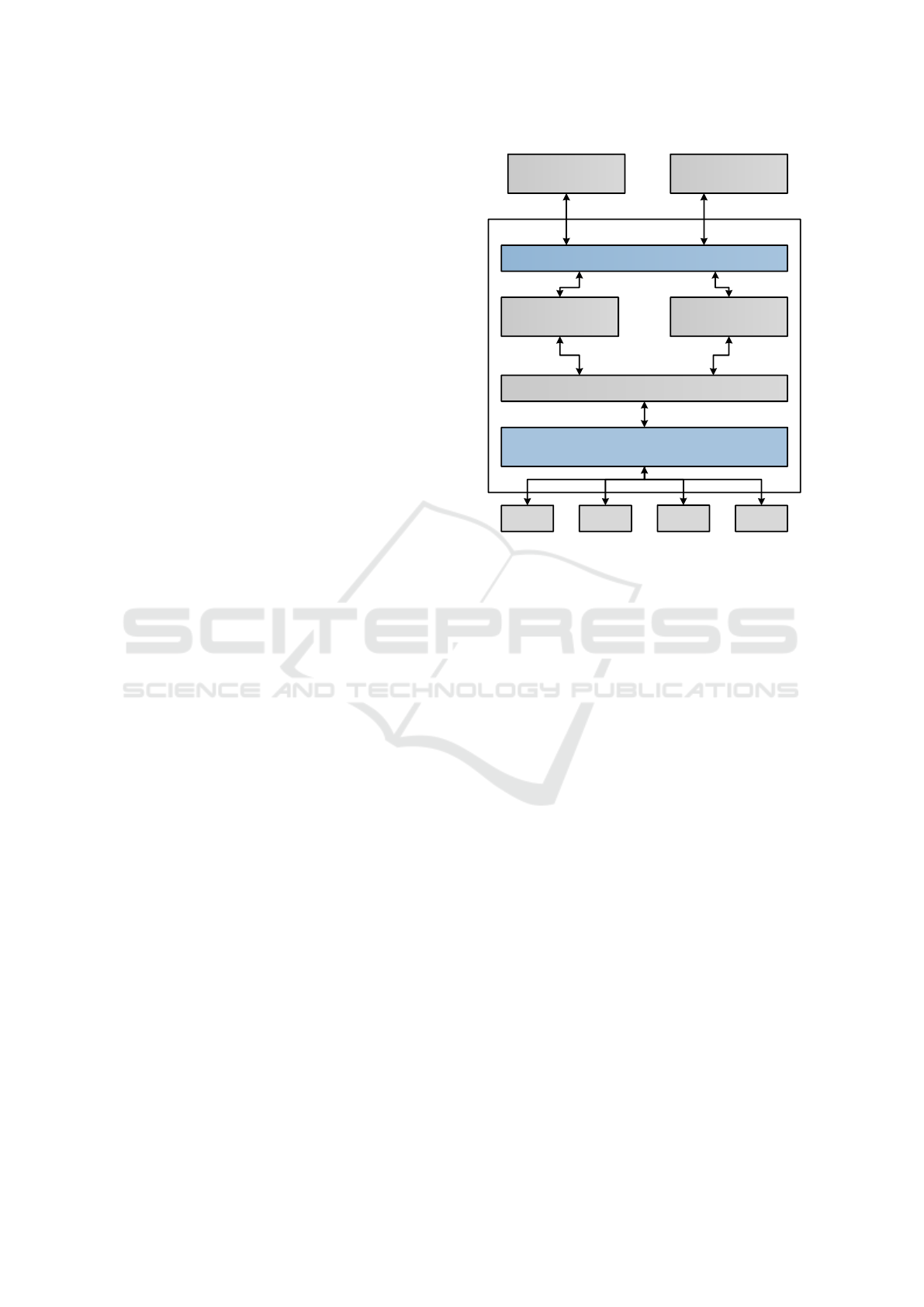
4.1 RSU Cloud
The system concept of the RSU cloud is modular and
hybrid. It consists of various communication inter-
faces (like 802.11p and LTE), the ITS facilities and
the central element the hybrid communication unit,
which separates the ITS facilities from the communi-
cation interfaces and the software stack of the RSU
cloud. The hybrid communication control handles
the distribution and reception of the messages. So it
is possible to send one message parallel over more
than one communication interface. On the other hand
all the received messages will be forwarded to the
facilities-layer, no matter from which interface they
were received. With this concept it is possible to
reach more road users over various communication
Hybrid Communica�on Control
C-V2X Landline802.11p
Cellular
RSU Cloud
ITS Facili�es
ITS Cloud
Applica�on
ITS Cloud
Applica�on
Dynamic Object Map / Database
Central Cloud Traffic Light
...
Figure 4: System concept of RSU cloud.
technologies, or achieve a safer transmission by us-
ing redundant paths.
The current system concept of the RSU cloud con-
sists of various communication interfaces to enable
different applications. The LTE interface realizes the
connection to the backbone. Furthermore, this inter-
face is used to distribute messages to all vehicles in re-
gion via GeoMessaging. The two interfaces 802.11p
and C-V2X are used to directly communicate with the
road user.
All the ITS applications run in Docker-Containers
(Rad et al., 2017) so that they are separated from each
other. This strengthens the safety and security, facil-
itates the roll out of the software components, and
makes them independent from the hardware. This
concept enables different partners to run their own
applications on the RSU cloud without causing inter-
ference to other applications (see (Salahuddin et al.,
2014) for an analysis from the resource management
point of view). Each ITS application could subscribe
for messages and information from the ITS-Facility-
Layer and from the Dynamic Object Map (DOM)
to realise their services. The RSU cloud, namely
a NVIDIA
R
Jetson
TM
TX2, is a computation unit
which contains a GPU to support parallel computa-
tion and AI algorithms.
Figure 4 shows the system concept of the RSU
cloud. Components that are also used in the cen-
tral cloud are marked grey. The components that are
unique to the RSU cloud are marked blue. Due to
the modular structure the concept is future-proof. Not
Cooperative Driving in Mixed Traffic with Heterogeneous Communications and Cloud Infrastructure
99
further supported interfaces can be easily replaced by
new state of the art interfaces or additional interfaces
can be added. It enables the simulcast operation for
backward compatibility. The software stack in the
RSU cloud shares the concept of modularity already
found in the hardware layout. It consists of a number
of micro services, which communicate using gRPC
(Google, 2018).
This approach offers flexibility for future exten-
sions and allows to quickly exchange single compo-
nents, e.g., for bug fixing or version updates. The core
system is the DOM, which stores static (e.g. maps)
and dynamic (e.g. vehicle positions, traffic light state)
information. Data ingress happens through ITS mes-
sages (especially CAM, CPM) as well as backend
systems (e.g., prognoses for traffic lights) and the
TLS (current traffic light state). Before information
is passed into the DOM, there is an additional step
of data fusion and validation. This step ensures that
only valid entries are inserted and objects, which were
detected by more than one method (e.g. via its own
CAM and the CPM of another vehicle), are inserted
only once. Data egress mainly concerns the genera-
tion of MAPEM and SPATEM and the communica-
tion with backend systems as described above. Ad-
ditionally, the information stored in the DOM can be
used to generate manoeuvre recommendations (e.g.,
lane change), which are broadcast using the MRM.
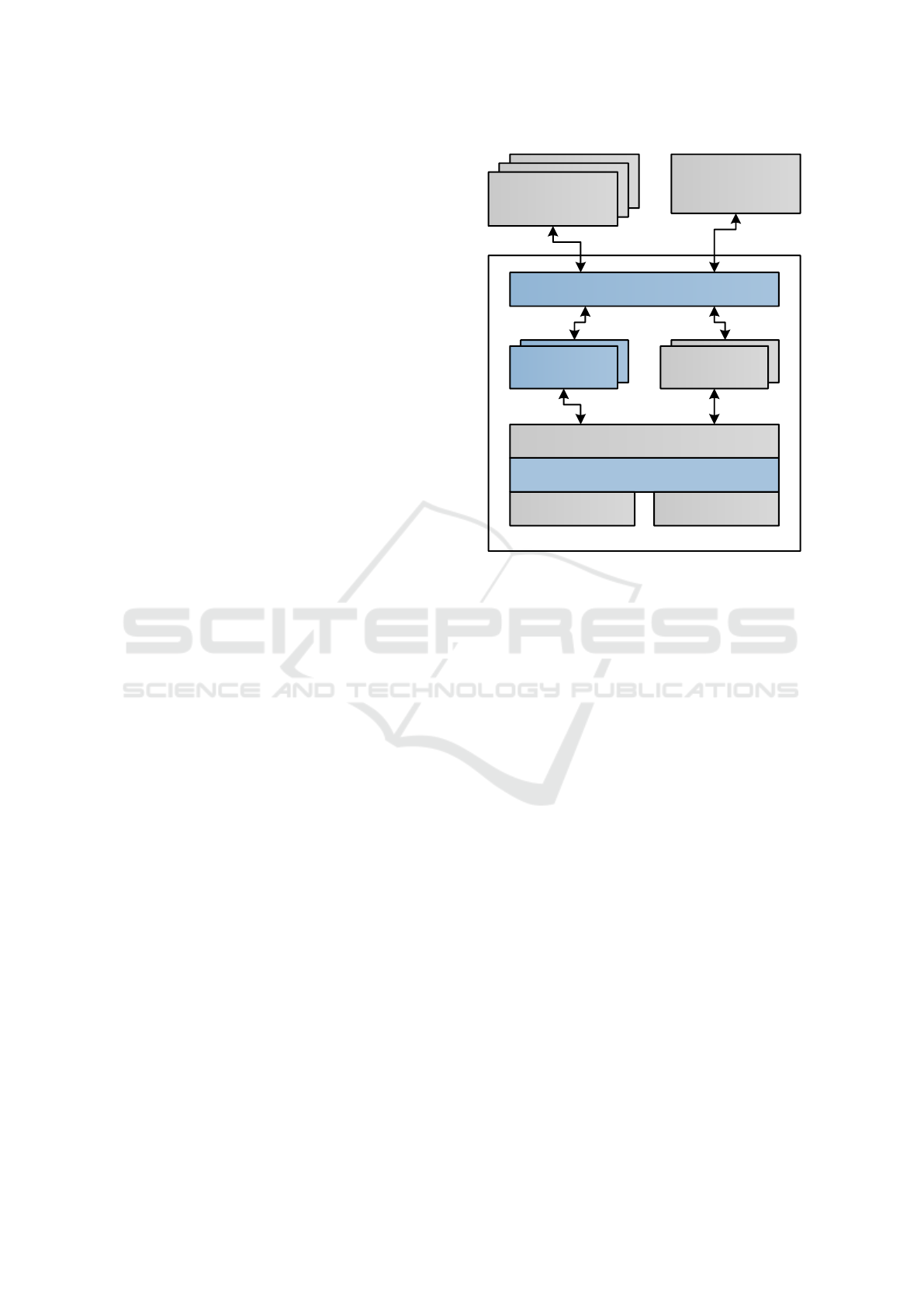
4.2 Central Cloud
In addition to the decentralized cloud environments
provided by the individual RSUs, we also consider the
usage of a centralized cloud-based solution, termed
central cloud in the scope of this project. A high-level
view of the architecture is provided in Figure 5, where
the components specific to the central cloud are high-
lighted in blue.
While the services provided via the central cloud
address the same ITS applications as the RSU, there
are some key differences. The only communication
channel between the connected vehicles and the cloud
services is provided by a cellular data connection. In
order to evaluate different communication schemes,
two distinct means of transporting ITS messages via
the cellular connection are supported. For the first
scheme, a TCP/IP connection providing the trans-
port layer for the standardized communication pro-
tocol MQTT (ISO/IEC 20922:2016, 2016) is estab-
lished to a central message broker deployed as part of
the central cloud in order to transport the ITS mes-
sages between the communicating parties. The mes-
sages are routed by the message broker according to a
topic-based publish-subscribe pattern. Alternatively,
ITS Facili�es
Traffic
Management
System
Central Cloud
Smart RSU/ RSU
Cloud
Smart RSU/ RSU
Cloud
RSU Cloud
Hybrid Communica�on Interface
ITS Cloud
Applica�on
ITS Cloud
Applica�on
ITS Cloud
Applica�on
ITS Cloud
Applica�on
Dynamic Object Map / Database
MQTT GeoMessaging
Figure 5: Architecture of the central cloud.
in order to allow for an efficient and scalable com-
munication without a central message broker, a Ge-
oMessaging solution, implemented by means of IPv6
multicast, which is deployed in the core of the cellular
network, is used. The interface between the commu-
nication channels and the applications is provided by
the ITS facilities layer, which allows for a complete
decoupling of the mode of communication from the
actual ITS applications.
The individual services deployed on the central
cloud platform are implemented as micro-services
and are coupled via a high-performance messaging
bus and gRPC APIs (Google, 2018). Due to the more
centralized nature of the central cloud, the ITS ap-
plications deployed have a larger pool of information
available, as information is ingested from a wider ge-
ographical region. Specifically, the central cloud ser-
vices are connected to all equipped vehicles and RSUs
in the target area. This allows the ingestion of real-
time data provided by the RSUs, including the status
of the traffic lights and sensor data. Additional in-
formation is made available via the Traffic Manage-
ment System (TMS) of the city of Dresden, VAMOS
(Krimmling, 2014). The TMS provides predictions
for both the signal state and the delay for each sig-
nal at the relevant intersections. This information is
pushed from the TMS to the respective service in the
central cloud using the well-established DATEX II
(CEN/TC 278, 2018) interface. The information pro-
vided by the various sources is combined into a coher-
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
100

ACV / NACVCentral/RSU Cloud
Tac�cal Planning
Sensors
Radar
Camera
Lidar
Environmental
Model
Opera�onal
Planning& Control
Hybrid Communica�on Interface
Environmental
Data
V2X Messages
Driving Maneuver
Recommenda�ons
and Inten�ons
V2XData
Driving Maneuver
Sensor Data,
Objects, Lanes
Situa�on
Interpreta�on
Environmental Data
Situa�on
V2X Messages
Human Machine Interface
Vehicle Interface
Situa�on
Human
Vehicle
Figure 6: Automated Driving System (ADS) and its inte-
gration into the overall architecture.
ent dynamic object map and, after fusion with static
information such as HD maps, provides the basis for
the ITS applications. The messages generated by the
cloud applications are processed by the ITS facilities
and, either via cloud-based MQTT or GeoMessaging,
transmitted to the connected vehicles. The messages
generated by the vehicles take the reverse path and are
forwarded to the appropriate cloud application, based
on the type of the message and other factors such as
the location of the originating vehicle.
5 VEHICLES
Cooperative driving in real traffic cannot be accom-
plished by focusing on automated vehicles alone.
In our work, we consider both automated and non-
automated vehicles and assume that all entities are
connected and share information.
5.1 Automated Connected
Vehicle (ACV)
Each ACV implements an ADS that enables the vehi-
cle to operate without intervention of a human driver
in a defined Operational Design Domain (ODD).
Briefly speaking, an ODD defines environmental and
time-of-day conditions and restrictions, respectively,
the presence or absence of certain traffic, and roadway
characteristics. Furthermore, in order to facilitate co-
operation during dynamic driving tasks, each ADS is
embedded into the overall architecture, as presented
in Section 2.1. That is, each ADS can rely on infor-
mation from other ACVs as well as NACVs while
simultaneously providing information such as driv-
ing manoeuvre intentions or sensor objects to both
other traffic participants and infrastructure services.
Figure 6 gives a broad overview of the implemented
ADS and its integration into the overall architecture.
The dashed line indicates the boundary of the ADS.
Three components serve as main input for the system:
sensors, the human machine interface (cf. Section
5.2) and the hybrid communication interface. Sensor
data, such as camera images, radar objects, lidar point
clouds, or even positioning data is essential to create a
local view of the surrounding environment. The ego-
centric environmental model includes host data from
the vehicle interface as well as relative sensor data
(e.g., dynamic objects or lanes). Furthermore, it in-
corporates world data such as static map data and dy-
namic environment data (e.g., accidents or traffic light
status) from the hybrid communication interface. As
discussed in Section 3 and 4, the hybrid communi-
cation interface allows for vehicle to vehicle, vehi-
cle to infrastructure, as well as vehicle to backend
communication. Finally, as different sources possi-
bly provide information about the same objects, ob-
ject data is fused on a fine-grained level. The environ-
ment model’s data is used to interpret situations and to
select and plan abstract manoeuvers. The situation in-
terpretation is necessary to detect possibly hazardous
situations, to obey traffic regulations, or to optimize
other metrics such as long-term fuel consumption.
Depending on the current situation, a tactical plan-
ner is subsequently selecting and planning abstract
driving manoeuvers such as lane changes, speed ad-
justments, or even parking manoeuvers. For coopera-
tion, the tactical planner simultaneously takes MRMs
from the infrastructure as well as MCMs from other
traffic participants into account. Due to their ab-
stract nature, manoeuvers are not directly realizable
by car actuators. For that reason, an operational plan-
ner translates the current driving manoeuvere into
time-dependent trajectories. A control component fi-
nally subdivides the trajectory into multiple control
sequences for the vehicle interface. More concretely,
it computes throttle and brake commands as well as
the steering angle for the car actuators. The ADS
provides two levels of output: local and environmen-
tal output. Local output refers to the interaction with
the driver of the vehicle via HMI (e.g., by visualizing
the next planned manoeuvre). Furthermore, it refers
to the control of the vehicle via the previously intro-
duced vehicle interface. Environmental output refers
to the provision of data via the hybrid communication
interface to the environment. That is, parts of the lo-
cal view of the host are transmitted in terms of the
following ITS messages:
• CAMs for host data (position, acceleration, etc.),
• CPMs for detected dynamic objects, and
• MCMs for coordinating manoeuvers with other
traffic participants.
Cooperative Driving in Mixed Traffic with Heterogeneous Communications and Cloud Infrastructure
101

In order to implement the cooperative turn discussed
earlier, the NACV and ACV exchange MCM mes-
sages and rely on CAM information. For NACV there
is no vehicle controlling component. However, the
communication and HMI parts (the upper part of Fig-
ure 6) are equivalent to the ACV architecture. More
insights on HMI design for both, ACV and NACV are
given in the following section.
5.2 Human Factors Regarding
Connected Vehicles and HMI
Development
Introducing connected vehicles to the traffic changes
the road-vehicle-user-system as new opportunities of
interaction and exchange of information arise (Kul-
mala and R
¨
am
¨
a, 2013). Potential benefits of con-
nected vehicles such as reduced pollution, increased
safety, and traffic flow can only be achieved if the
technology is accepted by the users. ACV users need
to feel comfortable throughout each drive and trust the
system when driving manoeuvres are adapted to in-
coming ITS messages by the system (Elbanhawi et al.,
2015). Assuming the cooperative turn with an NACV
as left-turning vehicle, the ACV driver might get con-
fused or even take over control, because the own car
reduces its speed without any obvious reason. There-
fore, it is important to understand whether the ACV
user needs information and if so, which information
these are in order to appreciate the system.
Contrary to ACV users, NACV users are still re-
sponsible to fulfil the main driving task. In the sce-
nario of connected vehicles, drivers should react to
incoming information and adapt their behaviours. In
case of the cooperative turn (see Figure 2), the driver
may get the information that he/she can turn first be-
fore the oncoming ACV takes its right of way. The
driver, first, needs to receive and understand this mes-
sage, and second, is expected to agree or just react ac-
cording to the message. Otherwise, cooperation fails
and expected benefits will not be achieved. One chal-
lenge for such cooperation is that implicit commu-
nication such as eye contact between drivers is not
possible if one party drives automatically; alterna-
tive communication channels are needed. Moreover,
NACVs have an additional need for an input channel
that enables its users to tailor cooperative manoeuvres
with other connected vehicles. If we modify the coop-
erative turn use case a bit, so that the oncoming vehi-
cle would be a NACV and is asked to agree to the co-
operation and reduce speed, the left-turning car might
need an agreement to this manoeuvre in order to en-
sure safe driving and execute the cooperative turn.
When designing technology that enables con-
nected, cooperative driving, we should take into ac-
count that driver’s behaviour is based on mental mod-
els that represent knowledge and learning experi-
ence with the system (Wilson and Rutherford, 1989).
Driver behavioural adaption will only take place if the
driver trusts the system (Lee and See, 2004). Trust
in the system is determined in turn by its reliabil-
ity and the users’ competence of the system. These
factors can only be established if users are given ap-
propriate feedback and system transparency, for in-
stance, on system performances, processes and objec-
tives (Rudin-Brown and Ian Noy, 2002; Lee and See,
2004; DIN EN ISO 9241-210, 2011).
Visual human-machine-interfaces (HMI) that are
developed in a user-centred manner have the potential
to support behavioural adaption by providing users
with individually relevant information on the current
traffic situation. Research focused on highway situa-
tions showed that inexperienced users of highly auto-
mated vehicles do not need much information in the
longer term, but certain information should always
be displayed. This includes the status of the system
(autopilot vs. manual), planned driving manoeuvres
and the current speed (Beggiato et al., 2015). In ad-
dition, emerging special situations, such as conges-
tion or accidents should be displayed. Mixed, urban,
connected traffic is much more complex than high-
way traffic. Research regarding specific information
needs for mixed, urban, connected traffic is limited.
Identifying such needs was part of the project and one
first important step in the development process of the
HMIs.
5.2.1 Identification of Information Needs
For the purpose of capturing ACV users’ and NACV
users’ potential informational needs as a first step,
three focus group discussions were conducted (N
total
= 16); for details see (Springer et al., 2018). The focus
groups consisted of experienced (N
e
= 6) vs. novice
(N
n
= 10) participants concerning vehicle automation,
which empathised with the ACV users’ (N
ACV
= 11)
vs. the NACV users’ (N
NACV
= 5) perspective. On the
basis of different use cases (e.g., see Section 2.2 and
Figure 2) the informational needs for each group were
discussed. Afterwards the relevance of each collected
piece of information was rated using a point system.
We developed a categorical system that distinguishes
between informational needs of the different vehicle
type users (NACV vs. ACV) as well as between the
users’ degree of experience in vehicle automation (ex-
perienced vs. non-experienced). Summing up the
findings, NACV users want the HMI to support them
in situation recognition as well as by giving action
recommendations. In detail, information about the
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
102
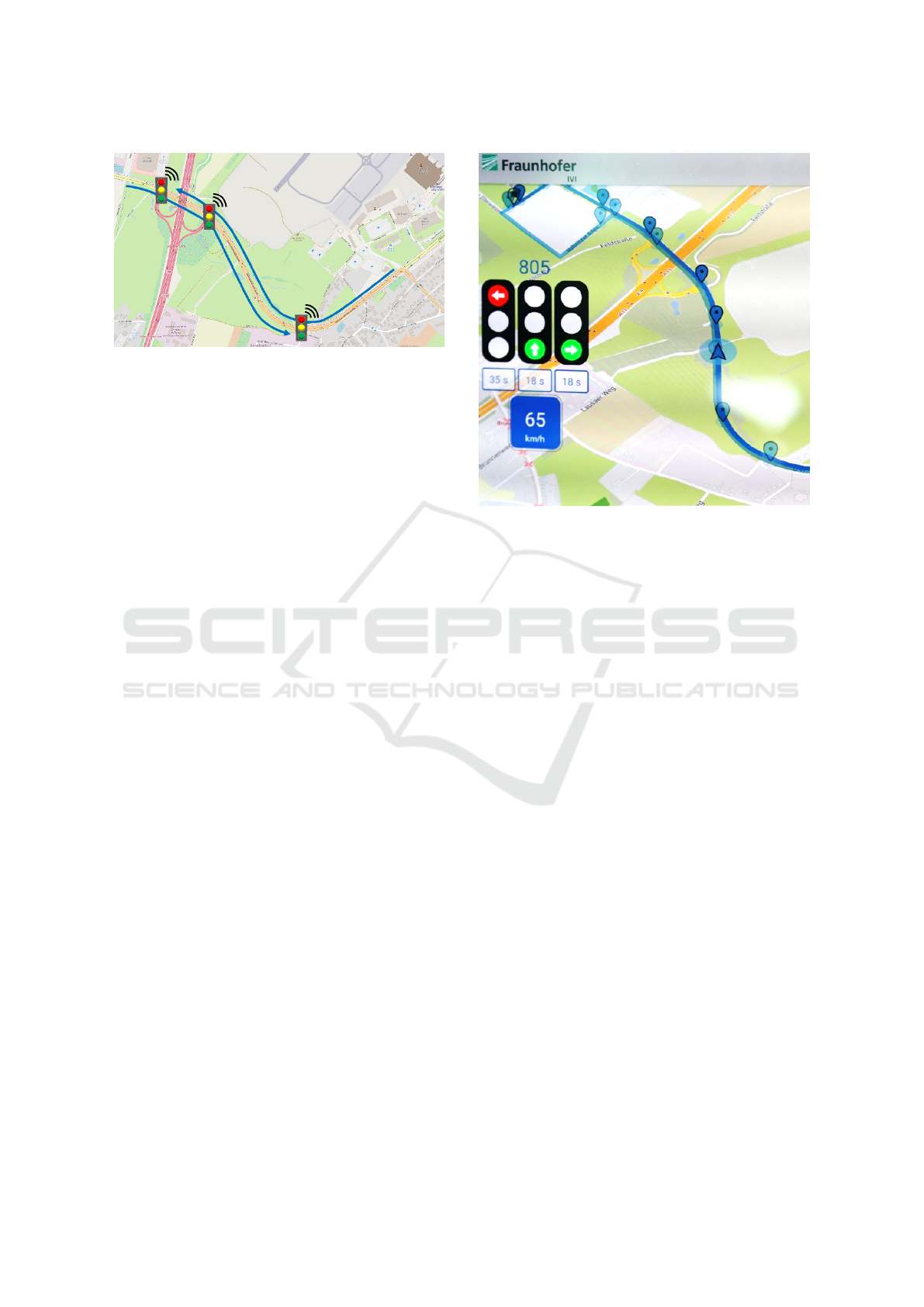
Figure 7: Schematic setup for an exemplary driving test
of connected and automated driving functions on a test
corridor in the Digital Testbed Dresden (source: Open-
StreetMap).
duration of the green and red phase, recognition of
other road users and their movement direction as well
as the status of cooperation were discussed as impor-
tant aspects. In the cooperative turn use case feedback
from the oncoming traffic relating to the cooperation
were of highest value. Some information such as the
duration of the green and red phase have been imple-
mented in existing HMIs (see Figure 8), but many de-
sired aspects have not been displayed yet.
According to the focus group results, an HMI
for ACV users is supposed to increase system trans-
parency by informing about driving manoeuvres,
recognised elements and by explaining “unusual” sys-
tem behaviour. For the use case cooperative turn, for
example, a risk assessment of the vehicle regarding
safe manoeuvring on basis of the vehicle’s capabili-
ties and the context of the situation was rated as most
important. Just as important as the risk assessment
was the situation detection; information regarding the
recognition of other vehicles, followed by the infor-
mation of what the intention of the own vehicle is,
was desired by the participants.
As an overall result, it was found that non-
experienced participants need a substantially higher
amount of information with a higher level of detail
compared to the experienced ones. Therefore, we rec-
ommend the development of adaptive and personalis-
able HMIs.
5.2.2 Mock-up Evaluation
Findings of the focus groups were used for develop-
ing first new HMI mock-ups. For ACV users, the
idea is to use a portable Head-Up Display (pHUD)
to have a flexible tool that can be used to integrate
connected driving in a conventional car. As a sec-
ond step in the HMI development process, the pHUD
mock-ups were discussed and evaluated within both
an HMI-Workshop (N
HMI−W S
= 4) with ACV experi-
Figure 8: HMI for connected test vehicles visualising re-
ceived traffic light information and speed recommendations
from RSU (source: Fraunhofer IVI).
enced participants and within a usability expert eval-
uation (N
expert
= 4) in order to identify improvement
potential before realizing the HMI.
Both studies showed that the development is on a
good path. However, chosen symbols for automated
vehicles were not intuitive and the usage of traffic
signs such as the right of way sign to describe ma-
noeuvre recommendations was judged as confusing.
For the cooperative turn, arrows showing movement
intentions of the cooperating vehicles were color-
coded with red, yellow and green to show the status
of cooperation and who has the right of way. Partici-
pants stated that yellow-coding was seen as negligible
and text would help to understand the manoeuvre rec-
ommendations. Identified potential for improvement
was presented to developing partners and will be in-
cluded in the further work.
6 LIVE DEMONSTRATION
The outlined architecture and the interaction of its
systems and components were initially demonstrated
as part of a first test event in November 2018 on the
Digital Testbed Dresden. One ACV and three NACVs
took part in multiple driving scenarios in public traf-
fic on a specific test corridor. The test corridor is
located in the north of the city of Dresden near the
Dresden International Airport and is equipped with
RSUs at four traffic light coordinated intersections
Cooperative Driving in Mixed Traffic with Heterogeneous Communications and Cloud Infrastructure
103

(Figure 7). The road infrastructure itself is well de-
veloped, with two lanes per direction allowing coop-
erative driving manoeuvres and minimizing possible
interference with public road traffic. The equipped
RSUs are connected to the respective traffic light con-
trol unit and to the central cloud. At the time of
the driving demonstration, the RSUs supported V2X
communication via 802.11p. A central element of the
driving demonstration was the connected mixed traf-
fic scenario. While driving along the test corridor, the
NACVs and the ACV communicated with the RSU
cloud, the central cloud as well as with each other.
The test vehicles approached the equipped intersec-
tions and received the current traffic light state, the
predicted remaining time as well as a speed recom-
mendation from the connected infrastructure. In the
connected vehicles, this information was forwarded
to the driver via a HMI shown in Figure 8. On the left
side of the HMI, the traffic light state and the remain-
ing time was visualised for each direction whereas
the speed recommendation was displayed specifically
for the test vehicle’s path. In addition, the test ve-
hicles sent CAMs to the central cloud. On the return
path several cooperative manoeuvres were performed,
demonstrating basic functionalities for cooperation in
mixed traffic scenarios (e.g. cooperative awareness)
with regard to the initially described use case cooper-
ative turn.
The driving demonstration showed that the de-
scribed architectures and systems can be operated un-
der real conditions. The event served as a starting
point for an intense evaluation phase equally consist-
ing of simulations and driving tests in public traffic.
7 CONCLUSIONS AND
OUTLOOK
In this work we presented an ITS system concept
for supporting cooperative driving in mixed traffic
scenarios. We especially emphasised the ability of
the system to incorporate vehicles equipped with het-
erogeneous communication technologies by introduc-
ing a heterogeneous cloud architecture that makes it
possible to support connected vehicles with ITS ser-
vices, e.g., recommendations regarding cooperative
manoeuvres or foresight driving. We gave insights
into the design and the interaction of the heteroge-
neous components, the automated vehicle and HMI
concepts and findings for both, the ACV and NACV.
We introduced a first live demonstration, which
showed that the system is usable in real mixed traf-
fic scenarios. After the successful demonstration of
the first system prototype, results of upcoming user
studies focusing on the HMI as well as results of real-
life tests on the test field will be integrated in the
next development steps. Our goal is to end up with a
user-friendly, reliable system that can cover the iden-
tified use cases and help to reach the long-term goals
such as reduced traffic jams, reduced pollution, and
increased traffic safety.
ACKNOWLEDGEMENTS
This work has been supported by the project Har-
monizeDD funded by the Federal Ministry of Trans-
port and Digital Infrastructure under the grant
16AVF1024.
REFERENCES
5GAA (2018). 5G Automotive Association project page.
https:/5gaa.org. Accessed: 2019-02-20.
Beggiato, M., Hartwich, F., Schleinitz, K., Krems, J., Oth-
ersen, I., and Petermann-Stock, I. (2015). What would
drivers like to know during automated driving? infor-
mation needs at different levels of automation.
C-ITS Platform (2016). Final report. Technical report, C-
ITS Platform. Accessed: 2019-02-12.
Cecchini, G., Bazzi, A., Masini, B. M., and Zanella,
A. (2017). Performance comparison between ieee
802.11p and lte-v2v in-coverage and out-of-coverage
for cooperative awareness. In 2017 IEEE Vehicular
Networking Conference (VNC), pages 109–114.
CEN/TC 278 (2018). Intelligent transport systems - DA-
TEX II data exchange specifications for traffic man-
agement and information - Part 1: Context and frame-
work. Standard.
DIN EN ISO 9241-210 (2011). Prozess zur Gestaltung
gebrauchstauglicher interaktiver Systeme. Standard,
ISO.
Elbanhawi, M., Simic, M., and Jazar, R. (2015). In the
passenger seat: Investigating ride comfort measures
in autonomous cars. IEEE Intelligent Transportation
Systems Magazine, 7(3):4–17.
ETSI EN 302 636-4-1 V1.3.2 (2017-08) (2017). ETSI EN
302 636-4-1 V1.3.2 (2017-08) Intelligent Transport
Systems (ITS); Vehicular Communications; GeoNet-
working; Part 4: Geographical addressing and for-
warding for point-to-point and point-to-multipoint
communications; Sub-part 1: Media-Independent
Functionality . Standard, ETSI.
ETSI EN 302 636-5-1 V2.1.1 (2017-08) (2017). ETSI EN
302 636-5-1 V2.1.1 (2017-08) Intelligent Transport
Systems (ITS); Vehicular Communications; GeoNet-
working; Part 5: Transport Protocols; Sub-part 1: Ba-
sic Transport Protocol . Standard, ETSI.
ETSI EN 302 637-2 V1.3.2 (2014-11) (2014). ETSI EN
302 637-2 V1.3.2 (2014-11) Intelligent Transport Sys-
tems (ITS); Vehicular Communications; Basic Set of
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
104

Applications; Part 2: Specification of Cooperative
Awareness Basic Service. Standard, ETSI.
Festag, A. (2014). Cooperative intelligent transport systems
standards in europe. IEEE Communications Maga-
zine, 52(12):166–172.
Google (2018). gRPC project page. https://grpc.io. Ac-
cessed: 2018-01-23.
Hameed Mir, Z. and Filali, F. (2014). Lte and ieee 802.11p
for vehicular networking: a performance evaluation.
EURASIP Journal on Wireless Communications and
Networking, 2014(1):89.
Hobert, L., Festag, A., Llatser, I., Altomare, L., Visin-
tainer, F., and Kovacs, A. (2015). Enhancements
of v2x communication in support of cooperative au-
tonomous driving. IEEE Communications Magazine,
53(12):64–70.
ISO/IEC 20922:2016 (2016). ISO/IEC 20922:2016 In-
formation technology – Message Queuing Telemetry
Transport (MQTT) v3.1.1. Standard, ISO.
Kloeppel, M., Grimm, J., Strobl, S., and Auerswald,
R. (2019). Performance evaluation of GLOSA-
algorithms under realistic traffic conditions using C2I-
communication. In Nathanail, E. G. and Karakikes,
I. D., editors, Data Analytics: Paving the Way to Sus-
tainable Urban Mobility. CSUM 2018, volume 879
of Advances in Intelligent Systems and Computing,
pages 44–52, Cham. Springer International Publish-
ing.
Krimmling, J. (2014). Das Dresdner Verkehrsmanage-
mentsystem VAMOS. In Sandrock, M. and Riegel-
huth, G., editors, Verkehrsmanagementzentralen in
Kommunen: Eine vergleichende Darstellung, pages
157–197. Springer Fachmedien Wiesbaden, Wies-
baden.
Kulmala, R. and R
¨
am
¨
a, P. (2013). Definition of behavioural
adaptation. In Rudin-Brown, C. and Jamson, S., ed-
itors, Behavioural adaptation and road safety : the-
ory, evidence, and action, pages 11–22. Boca Raton,
Florida CRC Press. Formerly CIP.
Lee, J. D. and See, K. A. (2004). Trust in automation:
Designing for appropriate reliance. Human Factors,
46(1):50–80. PMID: 15151155.
Rad, B. B., Bhatti, H. J., and Ahmadi, M. (2017). An in-
troduction to Docker and analysis of its performance.
International Journal of Computer Science and Net-
work Security (IJCSNS), 17(3):228.
Rudin-Brown, C. and Ian Noy, Y. (2002). Investiga-
tion of behavioral adaptation to lane departure warn-
ings. Transportation Research Record: Journal of the
Transportation Research Board, (1803):30–37.
Salahuddin, M., Al-Fuqaha, A., Guizani, M., and
Cherkaoui, S. (2014). Rsu cloud and its resource
management in support of enhanced vehicular appli-
cations.
Springer, S., Schmidt, C., and Schmalfuß, F. (2018). In-
formationsbedarf von Nutzern konventioneller, ver-
netzter und automatisierter, vernetzter Fahrzeuge im
urbanen Mischverkehr. In VDI, editor, Fahrerassis-
tenzsysteme und automatisiertes Fahren 2018, VDI-
Berichte 2335, pages 391–406. VDI-Verlag GmbH,
D
¨
usseldorf.
Statista (2018). Connected car report 2018. https://
www.statista.com/outlook/320/109/connected-car/
united-states. Accessed: 2019-02-20.
Wilson, J. R. and Rutherford, A. (1989). Mental models:
Theory and application in human factors. Human Fac-
tors, 31(6):617–634.
Zhang, L. (2018). Cooperative adaptive cruise control in
mixed traffic with selective use of vehicle-to-vehicle
communication. IET Intelligent Transport Systems,
pages 1243 – 1254.
Cooperative Driving in Mixed Traffic with Heterogeneous Communications and Cloud Infrastructure
105
