
Towards Locative Inconsistency-tolerant Hierarchical Probabilistic CTL
Model Checking: Survey and Future Work
Norihiro Kamide
1
and Juan Pedro Altamirano Bernal
2
1
Teikyo University, Faculty of Science and Engineering, Department of Information and Electronic Engineering,
Toyosatodai 1-1, Utsunomiya-shi, Tochigi 320-8551, Japan
2
Panamerican University, Faculty of Engineering, Department of Electronic Engineering and Digital Systems,
Josemaria Escriva de Balaguer No. 101, CP. 20190 Aguascalientes, Aguascalientes, Mexico
Keywords:
Probabilistic Temporal Logic, Inconsistency-tolerant Temporal Logic, Hierarchical Temporal Logic, Locative
Temporal Logic, Probabilistic Model Checking, Inconsistency-tolerant Model Checking, Hierarchical Model
Checking.
Abstract:
A locative inconsistency-tolerant hierarchical probabilistic computation tree logic (LIHpCTL) is introduced
in this paper to establish the logical foundation of a new model checking paradigm. This logic is an extension
of several previously proposed extensions of the standard temporal logic known as CTL, which is widely
used for model checking. The extended model checking paradigm proposed is intended to appropriately
verify locative (spatial), inconsistent, hierarchical, probabilistic (randomized), and time-dependent concurrent
systems. Additionally, a survey of various studies on probabilistic, inconsistency-tolerant, and hierarchical
temporal logics and their applications in model checking is conducted.
1 INTRODUCTION
In this paper, we introduce a locative inconsistency-
tolerant hierarchical probabilistic computation tree
logic (LIHpCTL), which is designed to form the log-
ical foundation of a new model checking paradigm.
This paradigm is intended to appropriately verify
locative (spatial), inconsistent, hierarchical, proba-
bilistic (randomized), and time-dependent concurrent
systems. LIHpCTL is an extension of several pre-
viously proposed locative, inconsistency-tolerant, hi-
erarchical, and probabilistic extensions of the stan-
dard temporal logic known as CTL (Clarke and Emer-
son, 1981), which is widely used for model checking
(Clarke and Emerson, 1981; Clarke et al., 1999; Holz-
mann, 2006; Clarke et al., 2018). Model checking is a
well-known formal and automated technique for ver-
ifying concurrent systems. Although the decidability
of model checking based on LIHpCTL has not been
determined yet, we present an illustrative example of
the novel LIHpCTL-based model checking paradigm.
In what follows, we present a brief explanation
of several standard and extended temporal logics and
their applications to model checking. The follow-
ing are well-known standard temporal logics typi-
cally used in model checking: computation tree logic
(CTL) (Clarke and Emerson, 1981), linear-time tem-
poral logic (LTL) (Pnueli, 1977), and full computa-
tion tree logic (CTL
∗
) (Emerson and Sistla, 1984;
Emerson and Halpern, 1986). The logic CTL (Clarke
and Emerson, 1981) is one of the most useful tem-
poral logics for model checking; it is based on the
branching-time paradigm, which uses computation
trees to represent the passage of time. The logic
LTL (Pnueli, 1977) is another form of temporal logic
widely used for model checking; it is based on the
linear-time paradigm, which uses linear order to rep-
resent the passage of time. The logic CTL
∗
(Emer-
son and Sistla, 1984; Emerson and Halpern, 1986) is
more expressive than LTL and CTL; it is based on the
branching-time paradigm with path quantifiers to rep-
resent the passage of time.
To extend the above-mentioned temporal log-
ics, other useful non-classical logics must be com-
bined and integrated in a natural way. This is also
an important issue in mathematical logic (Carnielli
et al., 2008). The following logics can be utilized
for this purpose: probabilistic (probability) logics,
inconsistency-tolerant (paraconsistent) logics, hier-
archical (sequential) logics, and spatial (locative)
logics. By combining and integrating these log-
ics, we can extend and refine the existing standard
model-checking framework. Model checking has
been extended to probabilistic model checking (Aziz
Kamide, N. and Bernal, J.
Towards Locative Inconsistency-tolerant Hierarchical Probabilistic CTL Model Checking: Survey and Future Work.
DOI: 10.5220/0007683808690878
In Proceedings of the 11th International Conference on Agents and Artificial Intelligence (ICAART 2019), pages 869-878
ISBN: 978-989-758-350-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
869

et al., 1995; Bianco and de Alfaro, 1995; Baier and
Kwiatkowska, 1998; Kwiatkowska et al., 2011; Baier
et al., 2018), inconsistency-tolerant model checking
(Easterbrook and Chechik, 2001; Chen and Wu, 2006;
Kaneiwa and Kamide, 2011b; Kamide and Endo,
2018), and hierarchical model checking (Kamide
and Kaneiwa, 2009; Kaneiwa and Kamide, 2011a;
Kamide, 2015; Kamide and Yano, 2017; Kamide,
2018).
Probabilistic temporal, inconsistency-tolerant
(paraconsistent) temporal, and hierarchical (se-
quential) temporal logics and their applications to
probabilistic, inconsistency-tolerant, and hierarchical
model checking, respectively, have been studied
by many researchers. In the following section, we
present a survey of these previously proposed logics
and their applications in model checking. However,
this survey is not comprehensive; information on
probabilistic temporal logics and their model check-
ing applications in greater detail can be found in
(Hanson, 1994; Hansson and Jonsson, 1994; Aziz
et al., 1995; Bianco and de Alfaro, 1995; Baier
and Kwiatkowska, 1998; Ognjanovic et al., 2011;
Kwiatkowska et al., 2011; Ognjanovic et al., 2012;
Kamide and Koizumi, 2016; Baier et al., 2018).
For inconsistency-tolerant temporal logics and their
model checking applications, information can be
found in greater detail in (Easterbrook and Chechik,
2001; Chen and Wu, 2006; Kamide, 2006a; Kamide
and Wansing, 2011; Kamide and Kaneiwa, 2010;
Kaneiwa and Kamide, 2011b; Kamide, 2015; Kamide
and Koizumi, 2016; Kamide and Endo, 2018). For
hierarchical temporal logics and their model checking
applications, information can be found in greater
detail in (Kamide and Kaneiwa, 2009; Kaneiwa
and Kamide, 2010; Kaneiwa and Kamide, 2011a;
Kamide, 2015; Kamide and Yano, 2017; Kamide,
2018).
The contents of this paper are then summarized
as follows. In Section 2, a survey of previously pro-
posed typical extended temporal logics and their ap-
plications to model checking is performed. In Section
3, the logic LIHpCTL is developed by extending sev-
eral existing typical extensions of CTL. In Section 4,
an illustrative example of model checking based on
LIHpCTL is presented. Section 5 presents the con-
clusion of this study with some remarks.
2 EXISTING LOGICS
2.1 Probabilistic Temporal Logics
In comparison with the standard non-probabilistic
temporal logics CTL
∗
, CTL, and LTL, probabilistic
temporal logics can be effectively used in random-
ized and stochastic situations. Thus, many studies re-
garding probabilistic temporal logics and their appli-
cations, including probabilistic model checking, have
been performed as discussed below. More informa-
tion can be found in (Hanson, 1994; Hansson and Jon-
sson, 1994; Aziz et al., 1995; Bianco and de Alfaro,
1995; Baier and Kwiatkowska, 1998; Ognjanovic
et al., 2011; Kwiatkowska et al., 2011; Ognjanovic
et al., 2012; Kamide and Koizumi, 2016; Baier et al.,
2018).
Probabilistic full computation tree logic (pCTL
∗
)
and its subsystem, probabilistic computation tree
logic (pCTL), have been investigated by Aziz et al.
(Aziz et al., 1995) and Bianco and de Alfaro (Bianco
and de Alfaro, 1995). The logics pCTL
∗
and pCTL
are obtained from CTL
∗
and CTL, respectively, by
adding the probabilistic or probability operator, P
≥x
.
Formulas with the form P
≥x
α can be interpreted as
follows: the probability that α holds in the future evo-
lution of the system is at least x. In (Bianco and
de Alfaro, 1995), pCTL
∗
and pCTL are introduced
to verify the reliability and performance of systems
modeled by discrete Markov chains. These logics can
appropriately express the quantitative bounds on the
probability of system evolutions. The complexities of
model checking algorithms with respect to the logics
are clarified in (Bianco and de Alfaro, 1995). In (Aziz
et al., 1995), model-checking algorithms for various
extensions of the previous settings of the logics are
proposed to verify the probabilistic non-deterministic
concurrent systems in which probabilistic behavior
coexists with non-determinism. Further, these algo-
rithms are shown to exhibit polynomial-time com-
plexity depending on the sizes of the systems. The
main difference between the pCTL
∗
settings by Aziz
et al. (Aziz et al., 1995) and those by Bianco and de
Alfaro (Bianco and de Alfaro, 1995) is the probability
measure settings in the probabilistic Kripke structure
of pCTL
∗
.
In (Hansson and Jonsson, 1994), PCTL, a proba-
bilistic and real-time extension of CTL, is investigated
based on an interpretation of discrete time Markov
chains. In contrast to the probabilistic frameworks
of pCTL and pCTL
∗
, the notion of probability in
PCTL is assigned to all of its temporal operators. For
example, a PCTL formula with the form G
≤t
≥p
α im-
plies that α holds continuously for t time units with
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
870

a probability of at least p. In (Hanson, 1994), a
timed probabilistic concurrent computation tree logic
(TPCTL) is introduced and investigated. In (Baier and
Kwiatkowska, 1998), probabilistic branching time
logics (PBTL and PBTL
∗
) are introduced based on the
probabilistic temporal logics TPCTL, PCTL, pCTL,
and pCTL
∗
, and model-checking algorithms based on
PBTL and PBTL
∗
are proposed to automatically ver-
ify randomized distributed systems. In (Ognjanovic
et al., 2011), a propositional discrete probabilistic
branching temporal logic (pBTL) is developed by ex-
tending CTL
∗
. There are two types of novel probabil-
ity operators in pBTL: P
p
≥r
and P
s
≥r
, where P
p
≥r
α im-
plies that the probability that α holds on a randomly
chosen branch is at least γ, and P
s
≥r
α means that the
probability that α holds on a particular branch is at
least γ. In (Ognjanovic et al., 2012), a propositional
probabilistic logic with discrete linear time is devel-
oped to handle the clinical reasoning with respect to
evidence. More recent developments in probabilistic
model checking based on probabilistic temporal log-
ics are reported in (Baier et al., 2018).
2.2 Inconsistency-tolerant Temporal
Logics
In comparison with the standard non-paraconsistent
temporal logics CTL
∗
, CTL, and LTL, inconsistency-
tolerant (paraconsistent) logics can be appropri-
ately used in inconsistency-tolerant situations (Priest,
2002; da Costa et al., 1995; Wansing, 1993). Typ-
ical examples of non-temporal paraconsistent logics
include Belnap and Dunn’s useful four-valued logic
(Belnap, 1977b; Belnap, 1977a; Dunn, 1976) and
Nelson’s paraconsistent four-valued logic (Almukdad
and Nelson, 1984; Nelson, 1949). Combining these
logics with CTL
∗
, CTL, and LTL has led to the in-
troduction of various inconsistency-tolerant tempo-
ral logics, and inconsistency-tolerant versions (exten-
sions) of CTL, CTL
∗
, and LTL have been developed
by many researchers.
The multi-valued computation tree logic (χCTL)
was introduced by Easterbrook and Chechik (East-
erbrook and Chechik, 2001) as the base logic for
multi-valued model checking, the first framework for
inconsistency-tolerant model checking. The quasi-
classical temporal logic (QCTL) was introduced by
Chen and Wu (Chen and Wu, 2006) to verify in-
consistent concurrent systems using inconsistency-
tolerant model checking. The paraconsistent full
computation tree logic (4CTL
∗
) was proposed by
Kamide (Kamide, 2006a) to obtain a logical founda-
tion for inconsistency-tolerant model checking. The
paraconsistent linear-time temporal logic (PLTL)
was introduced by Kamide and Wansing (Kamide
and Wansing, 2011) to obtain a cut-free and com-
plete Gentzen-type sequent calculus. The alternative
paraconsistent computation tree logic (PCTL) was
introduced by Kamide and Kaneiwa (Kamide and
Kaneiwa, 2010; Kaneiwa and Kamide, 2011b) and
offered an alternative inconsistency-tolerant model
checking framework. Kamide (Kamide, 2015) intro-
duced the sequence-indexed paraconsistent computa-
tion tree logic (SPCTL), which can be obtained from
the CTL by adding the paraconsistent negation con-
nective, ∼, and a sequence modal operator, [b]. This
logic was used to verify clinical reasoning through
inconsistency-tolerant hierarchical model checking.
Kamide and Endo (Kamide and Endo, 2018) re-
cently developed pCTL and pLTL, which are alter-
native refined versions of the paraconsistent tempo-
ral logics PCTL and PLTL, respectively, to obtain
various simple and efficient translation methods for
inconsistency-tolerant model checking. These alter-
native refined logics adopt a simple single-satisfaction
relation. The alternative version of PCTL is pCTL,
which has the same name as the probabilistic com-
putation tree logic. Whereas PLTL (Kamide and
Wansing, 2011), PCTL (Kamide and Kaneiwa, 2010;
Kaneiwa and Kamide, 2011b), 4CTL
∗
(Kamide,
2006a), and SPCTL (Kamide, 2015) have two types
of dual-satisfaction relations, |=
+
(verification or jus-
tification) and |=
−
(refutation or falsification), pCTL
and pLTL (Kamide and Endo, 2018) have a simple
single-satisfaction relation, |=
∗
, which is highly com-
patible with the standard single-satisfaction relations
of LTL, CTL, and CTL
∗
. The single-satisfaction re-
lation can provide simple proofs for embedding theo-
rems, and the connective ∼ can be formalized simply
and handled uniformly.
To deal with open, large, and complex concurrent
systems, such as cloud-based systems and web appli-
cation systems, it is necessary to have extended log-
ics with model checking frameworks that can also si-
multaneously handle both inconsistency-tolerant and
probabilistic reasoning. To this end, in (Kamide
and Koizumi, 2015; Kamide and Koizumi, 2016), a
partial solution was obtained (i.e., an inconsistency-
tolerant extension of the probabilistic computation
tree logic, pCTL, was developed). The paraconsis-
tent probabilistic computation tree logic (PpCTL),
which can be obtained from the probabilistic compu-
tation tree logic, pCTL, by adding a paraconsistent
negation connective ∼, was constructed in (Kamide
and Koizumi, 2015; Kamide and Koizumi, 2016)
based on a probability-measure-independent transla-
tion of PpCTL into pCTL. The theorem for embed-
ding PpCTL into pCTL was proven using this trans-
Towards Locative Inconsistency-tolerant Hierarchical Probabilistic CTL Model Checking: Survey and Future Work
871

lation and entails the relative decidability of PpCTL
with respect to pCTL (i.e., the decidability of pCTL
implies the decidability of PpCTL). This result in-
dicates that we can reuse the existing pCTL-based
model-checking algorithms by Aziz et al. (Aziz et al.,
1995) and Bianco and de Alfaro (Bianco and de Al-
faro, 1995) for the PpCTL-based model-checking al-
gorithms.
2.3 Hierarchical Temporal Logics
In what follows, we present a survey of various hier-
archical (sequential) temporal logics and their appli-
cations. Various extended temporal logics employing
the sequence (hierarchical) modal operator [b], where
b represents a sequence of symbols, have been inves-
tigated to handle hierarchical information (Kamide
and Kaneiwa, 2009; Kaneiwa and Kamide, 2010;
Kaneiwa and Kamide, 2011a; Kamide, 2015; Kamide
and Yano, 2017; Kamide, 2018).
The sequence modal operator [b] can be used
to represent the concepts of hierarchical information
in the following manner: a sequence structure pro-
duces a monoid hM, ;,
/
0i with the following informa-
tional interpretation (Wansing, 1993): (1) M is a set
of pieces of ordered information (i.e., a set of se-
quences); (2) ‘;’ is a binary operator (on M) that com-
bines two pieces of information (i.e., it is a concate-
nation operator on sequences); (3)
/
0 is an empty piece
of information (i.e., an empty sequence). Then, for-
mulas with the form [b
1
; b
2
;···; b
n
]α imply that α
is true with the sequence b
1
; b
2
;···; b
n
of ordered
pieces of information. In addition, formulas with the
form [
/
0]α, which coincide with α, imply that α is true
without any information (i.e., it is an eternal truth in
the sense of classical logic).
Kamide and Kaneiwa (Kamide and Kaneiwa,
2009; Kaneiwa and Kamide, 2011a) introduced
CTLS
∗
, which is an extension of CTL
∗
, by adding
[b] to CTL
∗
. Similarly, the sequence-indexed linear-
time temporal logic (SLTL), which is an extension of
LTL, was introduced in (Kaneiwa and Kamide, 2010)
by adding [b] to LTL. A proof system for SLTL was
developed to verify certain specifications of secure
authentication systems. The sequence-indexed para-
consistent computation-tree logic (SPCTL), which is
an extension of CTL, was introduced by Kamide in
(Kamide, 2015) by adding [b] and ∼ to CTL. As
explained above, SPCTL was used to verify clini-
cal reasoning through inconsistency-tolerant hierar-
chical model checking. In (Kamide and Yano, 2017;
Kamide, 2018), thesequential linear-time temporal
logic (sLTL) and sequential computation-tree logic
(sCTL) were developed by extending LTL and CTL,
respectively, to obtain the logical foundation of hier-
archical model checking.
The hierarchical (sequential) temporal logics
sCTL and sLTL proposed by Kamide and Yano in
(Kamide and Yano, 2017; Kamide, 2018) adopted a
simple single-satisfaction relation to obtain various
simple and efficient translation methods for hierarchi-
cal model checking. Although the previously pro-
posed logics, CTLS
∗
(Kamide and Kaneiwa, 2009;
Kaneiwa and Kamide, 2011a), SLTL (Kaneiwa and
Kamide, 2010), and SPCTL (Kamide, 2015), have
complex multiple sequence-indexed satisfaction rela-
tions, |=
ˆ
d
, sLTL and sCTL (Kamide and Yano, 2017;
Kamide, 2018) have a simple single-satisfaction rela-
tion, |=
?
, which is highly compatible with the stan-
dard single-satisfaction relations of LTL, CTL, and
CTL
∗
. Using this simple satisfaction relation, embed-
ding theorems can be easily proven, and the operator
[b] can be formalized simply and handled uniformly.
2.4 Locative Temporal Logics
Future studies should aim to extend the previously
proposed standard and extended temporal logics by
adding a location (locative) operator, [l
i
]. By adding
this operator to previously proposed logics, locative
(spatial) properties within the model checking frame-
work can be appropriately handled. The location
operator was originally introduced by Kobayashi et
al. in (N. Kobayashi and Yonezawa, 1999) using
a structural congruence relation in the formalization
of a distributed concurrent linear logic programming
language. The location operator was also reformu-
lated by Kamide in (Kamide, 2005; Kamide, 2006b)
and the reformulated operator was a variant of the
original setting by Kobayashi et al. (N. Kobayashi
and Yonezawa, 1999). In fact, the framework of the
original operator was improved in (Kamide, 2005;
Kamide, 2006b) as a purely logical formulation with-
out any structural congruence relations. Formulas
with the form [l
i
]α can be interpreted as follows:
proposition α holds at location l
i
.
Various locative (spatial) temporal logics employ-
ing the location operator [l
i
] have been investigated to
handle distributed concurrent systems. For example,
the locative paraconsistent probabilistic computa-
tion tree logic (LPpCTL) was introduced by Kamide
and Koizumi in (Kamide and Koizumi, 2016) by
adding [l
i
] to the inconsistency-tolerant (paraconsis-
tent) probabilistic computation tree logic, PpCTL. By
integrating the findings of the above-mentioned stud-
ies with the findings in (Kamide and Koizumi, 2016),
we intend to establish a logical foundation for the pro-
posed framework of locative inconsistency-tolerant
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
872

hierarchical probabilistic model checking based on
LIHpCTL employing [l
i
].
Assuming a space domain Loc and operator [l]
with l ∈ Loc, the satisfaction relation (s, l) |=
?
α of
LPpCTL can be interpreted as follows: proposition
α holds at time state s and location l. Then, various
properties and situations with space and time can be
expressed using LPpCTL formulas. The following
liveness property is an example: “If we input the
login password of host computer Comp3 at one of
the mobile computers Comp1 and Comp2, then we
will eventually be able to log in to Comp3.” This can
be formally expressed as AG([comp1]password ∨
[comp2]password→EF[comp3]login), where the
space domain, Loc, is {comp1, comp2, comp3}.
3 PROPOSED LOGIC
Formulas of locative inconsistency-tolerant hierar-
chical probabilistic computation tree logic (LIH-
pCTL) are constructed from countably many propo-
sitional variables, → (implication) ∧ (conjunction),
∨ (disjunction), ¬ (classical negation), ∼ (paracon-
sistent negation), X (next), G (globally), F (eventu-
ally), U (until), R (release), A (all computation paths),
E (some computation path), P
≤x
(less than or equal
probability), P
≥x
(greater than or equal probability),
P
<x
(less than probability), P
>x
(greater than prob-
ability), [l
i
] (location operator), and [b] (hierarchical
operator or sequence modal operator) where b is a se-
quence. Sequences are constructed from atomic se-
quences,
/
0 (empty sequence) and ; (composition).
The set of sequences (including the empty se-
quence
/
0) is denoted as SE. Lower-case letters b, c, ...
are used to denote sequences. An expression [
/
0]α
means α, and expressions [
/
0 ; b]α and [b ;
/
0]α mean
[b]α. The symbol Φ is used to denote a non-empty set
of propositional variables, the symbol Φ
∼
is used to
denote the set {∼p | p ∈ Φ}, and the symbol Φ
∼[d]
is
used to denote the set {[d]γ | γ ∈ Φ ∪ Φ
∼
}.
Definition 3.1. Let Loc be a finite non-empty set of lo-
cations, and assume l ∈ Loc, and x ∈ [0, 1]. Formulas
α and sequences b of LIHpCTL are defined by the fol-
lowing grammar, assuming p and e represent proposi-
tional variables and atomic sequences, respectively:
α ::= p | α ∧ α | α ∨ α | α→α | ¬α | ∼α |
AXα | EXα | AGα | EGα | AFα | EFα |
A(αUα) | E(αUα) | A(αRα) | E(αRα) |
P
≤x
α | P
≥x
α | P
<x
α | P
>x
α | [l]α | [b]α.
b ::= e |
/
0 | b ; b.
An expression [d] is used to represent
[d
0
][d
1
]···[d
i
] with i ∈ ω, d
i
∈ SE and d
0
≡
/
0.
The expression [d] can be the empty sequence and is
not uniquely determined.
Definition 3.2. A structure (Loc, S, S
0
, R, µ
s
, L
?
) is
a locative inconsistency-tolerant hierarchical proba-
bilistic model iff
1. Loc is a finite non-empty set of locations,
2. S is the set of states,
3. S
0
is a set of initial states and S
0
⊆ S,
4. R is a binary relation on S which satisfies the con-
dition: ∀s ∈ S ∃s
0
∈ S [(s, s
0
) ∈ R],
5. µ
s
is a certain probability measure concerning s ∈
S: a set of paths beginning at s is mapped into a
real number in [0, 1],
6. L
?
is a mapping from S to the power set of
S
d∈SE
Φ
∼[d]
.
A path in a hierarchical probabilistic model is an
infinite sequence of states, π = s
0
, s
1
, s
2
, ... such that
∀i ≥ 0 [(s
i
, s
i+1
) ∈ R].
Definition 3.3. (LIHpCTL). A locative
inconsistency-tolerant hierarchical probabilistic
satisfaction relation (M, hs, li) |=
?
α for any formula
α, where M is a locative inconsistency-tolerant hier-
archical probabilistic model (Loc, S, S
0
, R, µ
s
, L
?
), s
represents a state in S, and l represents a location in
Loc, is defined by:
1. for any γ ∈ Φ
∼[d]
(d ∈ SE), (M, hs, li) |=
?
γ iff γ ∈
L
?
(s),
2. for any p ∈ Φ, (M, hs, li) |=
?
[d]∼p iff (M, hs, li) |=
?
∼[d]p,
3. (M, hs, li) |=
?
[d][b]α iff (M, hs, li) |=
?
[d ; b]α,
4. (M, hs, li) |=
?
[d](α ∧ β) iff (M, hs, li) |=
?
[d]α and
(M, hs, li) |=
?
[d]β,
5. (M, hs, li) |=
?
[d](α ∨ β) iff (M, hs, li) |=
?
[d]α or
(M, hs, li) |=
?
[d]β,
6. (M, hs, li) |=
?
[d](α→β) iff (M, hs, li) |=
?
[d]α implies
(M, hs, li) |=
?
[d]β,
7. (M, hs, li) |=
?
[d]¬α iff (M, hs, li) 6|=
?
[d]α,
8. for any k ∈ Loc, (M, hs, li) |=
?
[d][k]α iff (M, hs, ki) |=
?
[d]α,
9. for any x ∈ [0, 1], (M, hs, li) |=
?
[d]P
≤x
α iff µ
s
({w ∈
Ω
s
| (M, hs, li) |=
?
[d]α}) ≤ x,
10. for any x ∈ [0, 1], (M, hs, li) |=
?
[d]P
≥x
α iff µ
s
({w ∈
Ω
s
| (M, hs, li) |=
?
[d]α}) ≥ x,
11. for any x ∈ [0, 1], (M, hs, li) |=
?
[d]P
<x
α iff µ
s
({w ∈
Ω
s
| (M, hs, li) |=
?
[d]α}) < x,
12. for any x ∈ [0, 1], (M, hs, li) |=
?
[d]P
>x
α iff µ
s
({w ∈
Ω
s
| (M, hs, li) |=
?
[d]α}) > x,
13. (M, hs, li) |=
?
[d]AXα iff ∀s
1
∈ S [(s, s
1
) ∈ R implies
(M, hs
1
, li) |=
?
[d]α],
Towards Locative Inconsistency-tolerant Hierarchical Probabilistic CTL Model Checking: Survey and Future Work
873

14. (M, hs, li) |=
?
[d]EXα iff ∃s
1
∈ S [(s, s
1
) ∈ R and
(M, hs
1
, li) |=
?
[d]α],
15. (M, hs, li) |=
?
[d]AGα iff for all paths π ≡ s
0
, s
1
, s
2
, ...,
where s ≡ s
0
, and all states s
i
along π, we have
(M, hs
i
, li) |=
?
[d]α,
16. (M, hs, li) |=
?
[d]EGα iff there is a path π ≡
s
0
, s
1
, s
2
, ..., where s ≡ s
0
, and for all states s
i
along
π, we have (M, hs
i
, li) |=
?
[d]α,
17. (M, hs, li) |=
?
[d]AFα iff for all paths π ≡ s
0
, s
1
, s
2
, ...,
where s ≡ s
0
, there is a state s
i
along π such that
(M, hs
i
, li) |=
?
[d]α,
18. (M, hs, li) |=
?
[d]EFα iff there is a path π ≡ s
0
, s
1
, s
2
, ...,
where s ≡ s
0
, and for some state s
i
along π, we have
(M, hs
i
, li) |=
?
[d]α,
19. (M, hs, li) |=
?
[d]A(αUβ) iff for all paths π ≡
s
0
, s
1
, s
2
, ..., where s ≡ s
0
, there is a state s
j
along
π such that (M, hs
j
, li) |=
?
[d]β and ∀0 ≤ k < j
(M, hs
k
, li) |=
?
[d]α,
20. (M, hs, li) |=
?
[d]E(αUβ) iff there is a path π ≡
s
0
, s
1
, s
2
, ..., where s ≡ s
0
, and for some state s
j
along π, we have (M, hs
j
, li) |=
?
[d]β and ∀0 ≤ k < j
(M, hs
k
, li) |=
?
[d]α,
21. (M, hs, li) |=
?
[d]A(αRβ) iff for all paths π ≡
s
0
, s
1
, s
2
, ..., where s ≡ s
0
, and all states s
j
along π, we
have (M, hs
j
, li) |=
?
[d]β or ∃0 ≤ k < j (M, hs
k
, li) |=
?
[d]α,
22. (M, hs, li) |=
?
[d]E(αRβ) iff there is a path π ≡
s
0
, s
1
, s
2
, ..., where s ≡ s
0
, and for all states s
j
along π, we have (M, hs
j
, li) |=
?
[d]β or ∃0 ≤ k < j
(M, hs
k
, li) |=
?
[d]α,
23. (M, hs, li) |=
?
[d]∼∼α iff (M, hs, li) |=
?
[d]α,
24. (M, hs, li) |=
?
[d]∼[b]α iff (M, hs, li) |=
?
[d ; b]∼α,
25. (M, hs, li) |=
?
[d]∼(α ∧ β) iff (M, hs, li) |=
?
[d]∼α or
(M, hs, li) |=
?
[d]∼β,
26. (M, hs, li) |=
?
[d]∼(α ∨ β) iff (M, hs, li) |=
?
[d]∼α and
(M, hs, li) |=
?
[d]∼β,
27. (M, hs, li) |=
?
[d]∼(α→β) iff (M, hs, li) 6|=
?
[d]∼α and
(M, hs, li) |=
?
[d]∼β,
28. (M, hs, li) |=
?
[d]∼¬α iff (M, hs, li) 6|=
?
[d]∼α,
29. for any k ∈ Loc, (M, hs, li) |=
?
[d]∼[k]α
iff (M, hs, ki) |=
?
[d]∼α,
30. for any x ∈ [0, 1], (M, hs, li) |=
?
[d]∼P
≤x
α iff µ
s
({w ∈
Ω
s
| (M, hs, li) |=
?
[d]∼α}) > x,
31. for any x ∈ [0, 1], (M, hs, li) |=
?
[d]∼P
≥x
α iff µ
s
({w ∈
Ω
s
| (M, hs, li) |=
?
[d]∼α}) < x,
32. for any x ∈ [0, 1], (M, hs, li) |=
?
[d]∼P
<x
α iff µ
s
({w ∈
Ω
s
| (M, hs, li) |=
?
[d]∼α}) ≥ x,
33. for any x ∈ [0, 1], (M, hs, li) |=
?
[d]∼P
>x
α iff µ
s
({w ∈
Ω
s
| (M, hs, li) |=
?
[d]∼α}) ≤ x,
34. (M, hs, li) |=
?
[d]∼AXα iff ∃s
1
∈ S [(s, s
1
) ∈ R and
(M, hs
1
, li) |=
?
[d]∼α],
35. (M, hs, li) |=
?
[d]∼EXα iff ∀s
1
∈ S [(s, s
1
) ∈ R implies
(M, hs
1
, li) |=
?
[d]∼α],
36. (M, hs, li) |=
?
[d]∼AGα iff there is a path π ≡
s
0
, s
1
, s
2
, ..., where s ≡ s
0
, and for some state s
i
along
π, we have (M, hs
i
, li) |=
?
[d]∼α,
37. (M, hs, li) |=
?
[d]∼EGα iff for all paths π ≡
s
0
, s
1
, s
2
, ..., where s ≡ s
0
, there is a state s
i
along π
such that (M, hs
i
, li) |=
?
[d]∼α,
38. (M, hs, li) |=
?
[d]∼AFα iff there is a path π ≡
s
0
, s
1
, s
2
, ..., where s ≡ s
0
, and for all states s
i
along
π, we have (M, hs
i
, li) |=
?
[d]∼α,
39. (M, hs, li) |=
?
[d]∼EFα iff for all paths π ≡ s
0
, s
1
, s
2
, ...,
where s ≡ s
0
, and all states s
i
along π, we have
(M, hs
i
, li) |=
?
[d]∼α,
40. (M, hs, li) |=
?
[d]∼A(αUβ) iff there is a path π ≡
s
0
, s
1
, s
2
, ..., where s ≡ s
0
, and for all states s
j
along
π, we have (M, hs = j, li) |=
?
[d]∼β or ∃0 ≤ k < j
(M, hs
k
, li) |=
?
[d]∼α,
41. (M, hs, li) |=
?
[d]∼E(αUβ) iff for all paths π ≡
s
0
, s
1
, s
2
, ..., where s ≡ s
0
, and all states s
j
along π, we
have (M, hs
j
, li) |=
?
[d]∼β or ∃0 ≤ k < j (M, hs
k
, li) |=
?
[d]∼α,
42. (M, hs, li) |=
?
[d]∼A(αRβ) iff there is a path π ≡
s
0
, s
1
, s
2
, ..., where s ≡ s
0
, and for some state s
j
along
π, we have (M, hs
j
, li) |=
?
[d]∼β and ∀0 ≤ k < j
(M, hs
k
, li) |=
?
[d]∼α,
43. (M, hs, li) |=
?
[d]∼E(αRβ) iff for all paths π ≡
s
0
, s
1
, s
2
, ..., where s ≡ s
0
, there is a state s
j
along
π such that (M, hs
j
, li) |=
?
[d]∼β and ∀0 ≤ k < j
(M, hs
k
, li) |=
?
[d]∼α,
44. (M, hs, li) |=
?
∼[d]∼α iff (M, hs, li) |=
?
[d]α,
45. (M, hs, li) |=
?
∼[d][b]α iff (M, hs, li) |=
?
∼[d ; b]α,
46. (M, hs, li) |=
?
∼[d](α ∧ β) iff (M, hs, li) |=
?
∼[d]α or
(M, hs, li) |=
?
∼[d]β,
47. (M, hs, li) |=
?
∼[d](α ∨ β) iff (M, hs, li) |=
?
∼[d]α and
(M, hs, li) |=
?
∼[d]β,
48. (M, hs, li) |=
?
∼[d](α→β) iff (M, hs, li) 6|=
?
∼[d]α and
(M, hs, li) |=
?
∼[d]β,
49. (M, hs, li) |=
?
∼[d]¬α iff (M, hs, li) 6|=
?
∼[d]α,
50. for any k ∈ Loc, (M, hs, li) |=
?
∼[d][k]α
iff (M, hs, ki) |=
?
∼[d]α,
51. for any x ∈ [0, 1], (M, hs, li) |=
?
∼[d]P
≤x
α iff µ
s
({w ∈
Ω
s
| (M, hs, li) |=
?
∼[d]α}) > x,
52. for any x ∈ [0, 1], (M, hs, li) |=
?
∼[d]P
≥x
α iff µ
s
({w ∈
Ω
s
| (M, hs, li) |=
?
∼[d]α}) < x,
53. for any x ∈ [0, 1], (M, hs, li) |=
?
∼[d]P
<x
α iff µ
s
({w ∈
Ω
s
| (M, hs, li) |=
?
∼[d]α}) ≥ x,
54. for any x ∈ [0, 1], (M, hs, li) |=
?
∼[d]P
>x
α iff µ
s
({w ∈
Ω
s
| (M, hs, li) |=
?
∼
[d]α}) ≤ x,
55. (M, hs, li) |=
?
∼[d]AXα iff ∃s
1
∈ S [(s, s
1
) ∈ R and
(M, hs
1
, li) |=
?
∼[d]α],
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
874

56. (M, hs, li) |=
?
∼[d]EXα iff ∀s
1
∈ S [(s, s
1
) ∈ R implies
(M, hs
1
, li) |=
?
∼[d]α],
57. (M, hs, li) |=
?
∼[d]AGα iff there is a path π ≡
s
0
, s
1
, s
2
, ..., where s ≡ s
0
, and for some state s
i
along
π, we have (M, hs
i
, li) |=
?
∼[d]α,
58. (M, hs, li) |=
?
∼[d]EGα iff for all paths π ≡
s
0
, s
1
, s
2
, ..., where s ≡ s
0
, there is a state s
i
along π
such that (M, hs
i
, li) |=
?
∼[d]α,
59. (M, hs, li) |=
?
∼[d]AFα iff there is a path π ≡
s
0
, s
1
, s
2
, ..., where s ≡ s
0
, and for all states s
i
along
π, we have (M, hs
i
, li) |=
?
∼[d]α,
60. (M, hs, li) |=
?
∼[d]EFα iff for all paths π ≡ s
0
, s
1
, s
2
, ...,
where s ≡ s
0
, and all states s
i
along π, we have
(M, hs
i
, li) |=
?
∼[d]α,
61. (M, hs, li) |=
?
∼[d]A(αUβ) iff there is a path π ≡
s
0
, s
1
, s
2
, ..., where s ≡ s
0
, and for all states s
j
along
π, we have (M, hs
j
, li) |=
?
∼[d]β or ∃0 ≤ k < j
(M, hs
k
, li) |=
?
∼[d]α,
62. (M, hs, li) |=
?
∼[d]E(αUβ) iff for all paths π ≡
s
0
, s
1
, s
2
, ..., where s ≡ s
0
, and all states s
j
along π, we
have (M, hs
j
, li) |=
?
∼[d]β or ∃0 ≤ k < j (M, hs
k
, li) |=
?
∼[d]α,
63. (M, hs, li) |=
?
∼[d]A(αRβ) iff there is a path π ≡
s
0
, s
1
, s
2
, ..., where s ≡ s
0
, and for some state s
j
along
π, we have (M, hs
j
, li) |=
?
∼[d]β and ∀0 ≤ k < j
(M, hs
k
, li) |=
?
∼
[d]α,
64. (M, hs, li) |=
?
∼[d]E(αRβ) iff for all paths π ≡
s
0
, s
1
, s
2
, ..., where s ≡ s
0
, there is a state s
j
along
π such that (M, hs
j
, li) |=
?
∼[d]β and ∀0 ≤ k < j
(M, hs
k
, li) |=
?
∼[d]α.
A formula α is valid in LIHpCTL iff
(M, hs, li) |=
?
α holds for any locative inconsistency-
tolerant hierarchical probabilistic model
M := (Loc, S, S
0
, R, µ
s
, L
?
), any s ∈ S, any l ∈ Loc,
and any locative inconsistency-tolerant hierarchical
probabilistic satisfaction relation |=
?
on M.
Remark 3.4.
1. LIHpCTL is regarded as an extension of the
following temporal logics: probabilistic CTL
(called pCTL) studied in (Aziz et al., 1995;
Bianco and de Alfaro, 1995), inconsistency-
tolerant CTL (also called pCTL, but different
from the above-mentioned probabilistic one) pro-
posed in (Kamide and Endo, 2018), and hierar-
chical CTL (called sCTL) proposed in (Kamide
and Yano, 2017; Kamide, 2018).
2. There are some possibilities of defining a prob-
ability measure µ
s
. For example, two probabil-
ity measures µ
+
s
and µ
−
s
, which were defined on
a Borel σ-algebra B
s
, were proposed in (Bianco
and de Alfaro, 1995). A probability measure µ
s
,
which is concerned with some discrete Markov
processes, was proposed in (Aziz et al., 1995).
3. The model checking problem for the probabilistic
CTL with the probability measures µ
+
s
and µ
−
s
was
shown to be decidable in (Bianco and de Alfaro,
1995). The model checking problem for the prob-
abilistic CTL with the probability measure µ
s
was
shown to be decidable in (Aziz et al., 1995).
4. The setting of the conditions concerning the
negated implication and negated negation in LIH-
pCTL is based on the axiom schemes ∼(α→β) ↔
¬∼α ∧ ∼β and ∼¬α ↔ ¬∼α. These axiom
schemes were originally introduced by De and
Omori in (De and Omori, 2015) wherein these are
shown to be natural and plausible from the point
of view of many-valued semantics.
5. The setting of the location operator is the same
as that of the locative paraconsistent probabilis-
tic computation tree logic (called LPpCTL) intro-
duced in (Kamide and Koizumi, 2016). The de-
cidability of the model checking problem for LP-
pCTL has not yet been proved.
6. The single-satisfaction relation |=
?
of LIHpCTL
is highly compatible with the standard single-
satisfaction relations of CTL. By using this satis-
faction relation, we can simply formalize and uni-
formly handle ∼ and [b].
We then have the following conjecture.
Conjecture 3.5 (Decidability).
1. (Relative decidability for LIHpCTL): If the
model-checking, validity, and satisfiability prob-
lems for the purely probabilistic fragment of LIH-
pCTL (i.e., it is obtained from CTL by adding the
probability operators) with a certain probability
measure are decidable, then the model-checking,
validity, and satisfiability problems for LIHpCTL
with the same probability measure as that of the
fragment are also decidable.
2. (Decidability for the probability-free fragment
of LIHpCTL): The model-checking, validity,
and satisfiability problems for the probability-
operator-free fragment of LIHpCTL (i.e., it is ob-
tained from LIHpCTL by deleting the probability
operators) is decidable.
4 ILLUSTRATIVE EXAMPLE
In what follows, we present an illustrative example
of verifying the reasoning process behind diagnosing
multiple sclerosis (MS), a rare disease, using the pro-
posed LIHpCTL-based model checking. The aim is
to verify mission-critical clinical reasoning with dis-
ease ontology using an extended formal method, such
Towards Locative Inconsistency-tolerant Hierarchical Probabilistic CTL Model Checking: Survey and Future Work
875
[Clinically Isolated Syndrome] [Multiple Sclerosis]
[With early relapses ]
[Without early relapses ]
[Primary Progresive MS]
[Relapsing-remitting MS] [Secondary Progresive MS]
80%
20%
20%
80%
85%
15%
Active
¬Worsening
Worsening
Stable
Active Progression
¬Active
Progression
¬Progretion Active
Stable
Stable
¬Progression
Active
Active
Progretion
Progression
¬Active
Healthy
~Healthy
Healthy
MRI detected lesions
~Healthy
Healthy
¬ MRI detected lesions
Stable
Stable
~Healthy
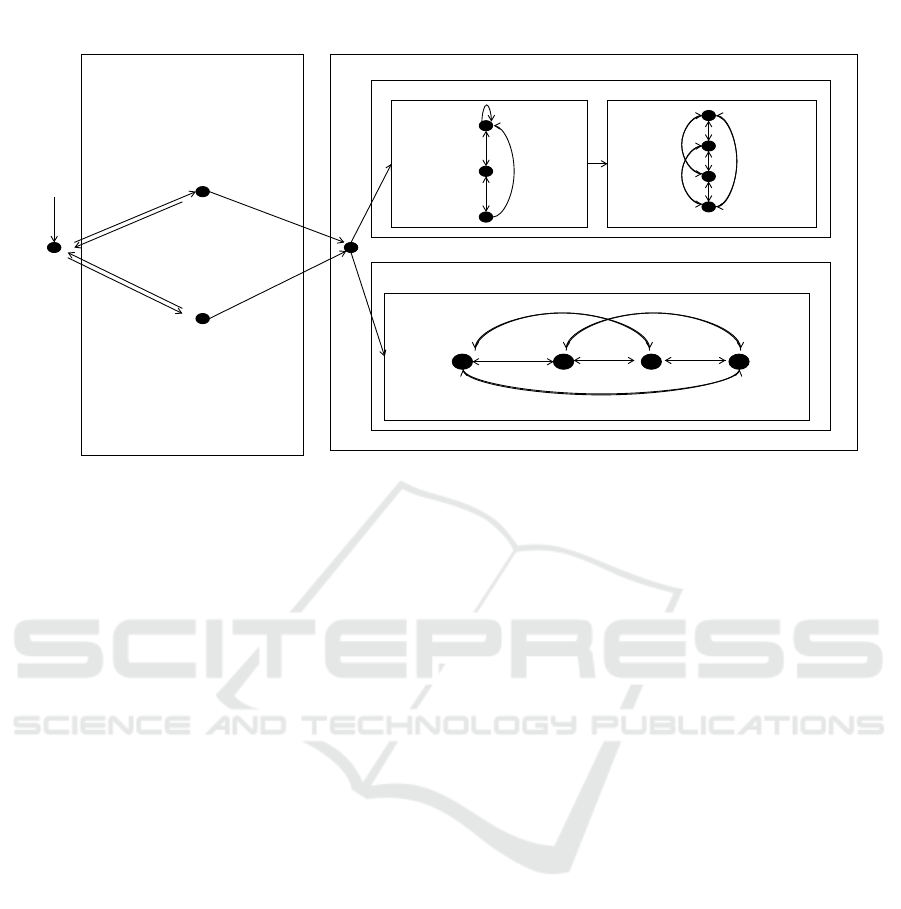
Figure 1: An ontological reasoning process model for multiple sclerosis.
as that in our proposal. We consider the scenario pre-
sented in Figure 1, in which a person suffers from MS.
The cause of this disease is not clear and there is no
known cure for it. For more information about MS,
see (Wikipedia, 2018) and the references therein.
MS is more common in people who live far-
ther from the equator; in particular, it is more com-
mon in regions with northern European populations.
Thus, the location operator [l
i
] in LIHpCTL can be
effectively used to describe this fact. Furthermore,
MS is typically diagnosed based on presenting signs
and symptoms in conjunction with supporting medi-
cal imaging based on Magnetic Resonance Imaging
(MRI) results and laboratory testing. It can be dif-
ficult to confirm, especially in early stages because
the signs and symptoms can be similar to those of
other medical conditions. Thus, the inconsistency-
tolerant (paraconsistent) negation connective ∼ in
LIHpCTL can be effectively used to describe such
symptoms and a patient’s health. For example, if it
cannot be determined whether someone is healthy,
then an ambiguous concept, healthy, can be repre-
sented by asserting the inconsistent formula healthy∧
∼healthy. This is well formalized because (healthy∧
∼healthy)→⊥ is not valid in LHIpCTL.
The United States National Multiple Sclerosis So-
ciety and the Multiple Sclerosis International Fed-
eration describe four types of MS as follows: clin-
ically isolated syndrome (CIS), relapsing-remitting
MS (RRMS), primary progressive MS (PPMS), and
secondary progressive MS (SPMS). The hierarchy of
these types can be effectively described by the se-
quence modal operator [b] in LIHpCTL.
RRMS is characterized by unpredictable relapses
followed by periods of months to years of remission
with no new signs of disease activity. Deficits that
occur during attacks may either resolve or leave per-
manent damage, the latter being the case in approxi-
mately 40% of attacks and being more common the
longer a person has the disease. This process de-
scribes the initial course of 80% of individuals with
MS, and it usually begins with CIS. In CIS, a person
has an attack suggestive of demyelination but does
not fulfill the criteria for multiple sclerosis. Of the
individuals experiencing CIS, 30–70% later develop
MS. PPMS occurs in approximately 10–20% of in-
dividuals, with no remission after the initial symp-
toms. SPMS occurs in approximately 65% of indi-
viduals with initial RRMS and involves a progressive
neurologic decline between acute attacks without any
definite periods of remission. These probabilistic phe-
nomena concerning MS can be effectively expressed
by the probabilistic operators in LIHpCTL.
We can verify the following statements using LIH-
pCTL:
1. “Is there a state in which a person is both healthy
and unhealthy with CIS?”
2. “Is there a state in which a person is both healthy
and unhealthy with RRMS or PPMS?”
The first statement is true, while the second statement
is not. These statements are expressed as follows:
1. [Disease ; CIS]EF(healthy ∧ ∼healthy),
2. [Disease ; MS ; RRMS]EF(healthy ∧ ∼healthy) ∨
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
876

[Disease ; MS ; PPMS]EF(healthy ∧ ∼healthy).
We can also verify the following statement using
LIHpCTL:
“If a person living in the USA has CIS and
no lesion has been detected by the MRI, then
there is an approximately 80% chance that the
person will be cured in the near future.”
This statement is true and is expressed as follows:
[USA][Disease ; CIS] (AG(∼healthy ∧
¬MRIdetectedLesion) → EF(P
≤0.85
cure ∧
P
≥0.75
cure)).
5 CONCLUSION
In this paper, we have introduced a new extended tem-
poral logic, LIHpCTL, to establish the logical founda-
tion of a new model checking paradigm. This model
checking paradigm is called locative inconsistency-
tolerant hierarchical probabilistic CTL model check-
ing, and is intended to effectively verify locative, in-
consistent, hierarchical, probabilistic (randomized),
and time-dependent concurrent systems. LIHpCTL
is an extension of previously proposed locative,
inconsistency-tolerant, hierarchical, and probabilistic
extensions of the standard temporal logic known as
CTL. We have also presented a survey of various stud-
ies on probabilistic, inconsistency-tolerant, and hi-
erarchical temporal logics and their applications to
model checking. Although the decidability of the
model checking problem for LIHpCTL has not yet
been determined, we have presented an illustrative
example for verifying the clinical reasoning process
for a disease, MS, using the LIHpCTL-based model
checking paradigm. We have thus shown that LIH-
pCTL and its model checking framework, which is an
extension of existing frameworks, are useful for a va-
riety of existing and novel applications in computer
science and artificial intelligence.
ACKNOWLEDGEMENTS
This research was supported by the Kayamori Foun-
dation of Informational Science Advancement. This
research has been partially supported by JSPS KAK-
ENHI Grant Numbers JP18K11171, JP16KK0007
and JSPS Core-to-Core Program (A. Advanced Re-
search Networks).
REFERENCES
Almukdad, A. and Nelson, D. (1984). Constructible falsity
and inexact predicates. Journal of Symbolic Logic,
49:231–233.
Aziz, A., Singhal, V., and Balarin, F. (1995). It usually
works: The temporal logic of stochastic systems. In
Proceedings of the 7th Int. Conf. on Computer Aided
Verification (CAV 1995), Lecture Notes in Computer
Science 939, pages 155–165.
Baier, C., de Alfaro, L., Forejt, V., and Kwiatkowska, M.
(2018). Model Checking Probabilistic Systems, In:
Handbook of Model Checking, pp. 963-999. Springer.
Baier, C. and Kwiatkowska, M. (1998). Model checking
for a probabilistic branching time logic with fairnes.
Distributed Computing, 11:125–155.
Belnap, N. (1977a). How a computer should think, in: in:
Contemporary Aspects of Philosophy, (G. Ryle ed.),
pp. 30-56. Oriel Press, Stocksfield.
Belnap, N. (1977b). A useful four-valued logic in: J.M.
Dunn and G. Epstein (eds.), Modern Uses of Multiple-
Valued Logic, pp. 5-37. Reidel, Dordrecht.
Bianco, A. and de Alfaro, L. (1995). Model checking of
probabilistic and nondeterministic systems. In Pro-
ceedings of the 15th Conf. on Foundations of Soft-
ware Technology and Theoretical Computer Science
(FSTTCS 1995), Lecture Notes in Computer Science
1026, pages 499–513.
Carnielli, W., Coniglio, M., Gabbay, D., Gouveia, P., and
Sernadas, C. (2008). Analysis and synthesis of log-
ics: How to cut and paste reasoning systems, Applied
Logic Series, Vol. 35. Springer.
Chen, D. and Wu, J. (2006). Reasoning about inconsistent
concurrent systems: A non-classical temporal logic.
In Lecture Notes in Computer Science, volume 3831,
pages 207–217.
Clarke, E. and Emerson, E. (1981). Design and synthesis of
synchronization skeletons using branching time tem-
poral logic. In Lecture Notes in Computer Science,
volume 131, pages 52–71.
Clarke, E., Grumberg, O., and Peled, D. (1999). Model
checking. The MIT Press.
Clarke, E., Henzinger, T., Veith, H., and Bloem, R. (2018).
Handbook of Model Checking. Springer.
da Costa, N., Beziau, J., and Bueno, O. (1995). Aspects of
paraconsistent logic. Bulletin of the IGPL, 3 (4):597–
614.
De, M. and Omori, H. (2015). Classical negation and ex-
pansions of belnap–dunn logic. Studia Logica, 103
(4):825–851.
Dunn, J. (1976). Intuitive semantics for first-degree entail-
ment and ‘coupled trees’. Philosophical Studies, 29
(3):149–168.
Easterbrook, S. and Chechik, M. (2001). A framework for
multi-valued reasoning over inconsistent viewpoints.
In Proceedings of the 23rd International Conference
on Software Engineering (ICSE 2001), pages 411–
420.
Towards Locative Inconsistency-tolerant Hierarchical Probabilistic CTL Model Checking: Survey and Future Work
877

Emerson, E. and Halpern, J. (1986). ‘sometimes’ and ‘not
never’ revisited: on branching versus linear time tem-
poral logic. Journal of the ACM, 33 (1):151–178.
Emerson, E. and Sistla, A. (1984). Deciding full branching
time logic. Information and Control, 61:175–201.
Hanson, H. (1994). Time and probability in formal design of
distributed systems, real-time safety critical systems.
Elsevier.
Hansson, H. and Jonsson, B. (1994). A logic for reasoning
about time and reliability. Formal Aspects of Comput-
ing, 6 (5):512–535.
Holzmann, G. (2006). The SPIN model checker: Primer
and reference manual. Addison-Wesley.
Kamide, N. (2005). A spatial modal logic with a loca-
tion interpretation. Mathematical Logic Quarterly, 51
(4):331–341.
Kamide, N. (2006a). Extended full computation-tree logics
for paraconsistent model checking. Logic and Logical
Philosophy, 15 (3):251–276.
Kamide, N. (2006b). Linear and affine logics with temporal,
spatial and epistemic operators. Theoretical Computer
Science, 353 (1-3):165–207.
Kamide, N. (2015). Inconsistency-tolerant temporal rea-
soning with hierarchical information. Information Sci-
ences, 320:140–155.
Kamide, N. (2018). Logical foundations of hierarchical
model checking. Data Technologies and Applications,
52 (4):539–563.
Kamide, N. and Endo, K. (2018). Logics and transla-
tions for inconsistency-tolerant model checking. In
Proceedings of the 10th International Conference on
Agents and Artificial Intelligence (ICAART 2018),
volume 2, pages 191–200.
Kamide, N. and Kaneiwa, K. (2009). Extended full
computation-tree logic with sequence modal operator:
Representing hierarchical tree structures. Proceedings
of the 22nd Australasian Joint Conference on Artifi-
cial Intelligence (AI’09), Lecture Notes in Artificial
Intelligence, 5866:485–494.
Kamide, N. and Kaneiwa, K. (2010). Paraconsistent nega-
tion and classical negation in computation tree logic.
In Proceedings of the 2nd International Conference
on Agents and Artificial Intelligence (ICAART 2010),
volume 1, pages 464–469.
Kamide, N. and Koizumi, D. (2015). Combining paracon-
sistency and probability in ctl. Proceedings of the 7th
International Conference on Agents and Artificial In-
telligence (ICAART 2015), 2:285–293.
Kamide, N. and Koizumi, D. (2016). Method for combin-
ing paraconsistency and probability in temporal rea-
soning. Journal of Advanced Computational Intelli-
gence and Intelligent Informatics, 20:813–827.
Kamide, N. and Wansing, H. (2011). A paraconsistent
linear-time temporal logic. Fundamenta Informaticae,
106 (1):1–23.
Kamide, N. and Yano, R. (2017). Logics and translations
for hierarchical model checking. Proceedings of the
21st International Conference on Knowledge-Based
and Intelligent Information and Engineering Systems
(KES2017), Procedia Computer Science, 112:31–40.
Kaneiwa, K. and Kamide, N. (2010). Sequence-indexed
linear-time temporal logic: Proof system and applica-
tion. Applied Artificial Intelligence, 24 (10):896–913.
Kaneiwa, K. and Kamide, N. (2011a). Conceptual modeling
in full computation-tree logic with sequence modal
operator. International Journal of Intelligent Systems,
26 (7):636–651.
Kaneiwa, K. and Kamide, N. (2011b). Paraconsistent com-
putation tree logic. New Generation Computing, 29
(4):391–408.
Kwiatkowska, M., Norman, G., and Parker, D. (2011).
Prism 4.0: Verification of probabilistic real-time sys-
tems. Proceedings of the 23rd International Confer-
ence on Computer Aided Verification (CAV 11), Lec-
ture Notes in Computer Science, 6806:585–591.
N. Kobayashi, T. S. and Yonezawa, A. (1999). Distributed
concurrent linear logic programming. Theoretical
Computer Science, 227:185–220.
Nelson, D. (1949). Constructible falsity. Journal of Sym-
bolic Logic, 14:16–26.
Ognjanovic, Z., Doder, D., and Markovic, Z. (2011). A
branching time logic with two types of probability op-
erators. Proceedings of the 5th International Confer-
ence on Scalable Uncertainty Management, Lecture
Notes in Artificial Intelligence, 6929:219–232.
Ognjanovic, Z., Markovic, Z., Raskovic, M., Doder, D., and
Perovic, A. (2012). A propositional probabilistic logic
with discrete linear time for reasoning about evidence.
Annals of Mathematics and Artificial Intelligence, 65
(2-3):217–243.
Pnueli, A. (1977). The temporal logic of programs. In Pro-
ceedings of the 18th IEEE Symposium on Foundations
of Computer Science, pages 46–57.
Priest, G. (2002). Paraconsistent logic, Handbook of Philo-
sophical Logic (Second Edition), Vol. 6, D. Gabbay
and F. Guenthner (eds.). Kluwer Academic Publish-
ers, Dordrecht, pp. 287-393.
Wansing, H. (1993). The logic of information structures.
In Lecture Notes in Computer Science, volume 681,
pages 1–163.
Wikipedia (2018). Multiple sclerosis. Wikipedia,
https://en.wikipedia.org/wiki/Multiple_sclerosis.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
878
