
Extending EAST-ADL for Modeling and Analysis of Partitions on
Functional Architectures
Christoph Etzel and Bernhard Bauer
Institute of Computer Science, University of Augsburg, Germany
Keywords:
System Architecture, Model-driven Systems Engineering, Automotive Systems Engineering, EAST-ADL.
Abstract:
The complexity in automotive systems engineering is increasing over the last decade. In particular, new
comfort functions as well as functions towards autonomous driving are reasons for this complexity. A new
dimension is introduced by the usage of multi-core processors since there is a shift from sequential to parallel
thinking in the different development phases. Therefore, in this paper we present an approach for supporting
the development process of distributed systems aligned with the EAST-ADL approach, by using partitioning.
We present an extension to EAST-ADL for partitioning and show ways how an automatic partitioning on
different levels of abstraction can be achieved. These partitions can support system designers during the
design process of functional architectures, by giving a first insight how well the functional components can be
distributed on hardware in later stages of the development process.
1 INTRODUCTION
In recent years, automotive systems are containing an
increasing part of hard- and software systems result-
ing in huge distributed system. Already in 2007 an
BMW 7 contained 67 embedded devices providing
270 functions interacting with the user (Pretschner
et al., 2007). Up to 100 Electronic Control Units
(ECUs) have been placed in premium vehicles in
2013 (Lukasiewycz et al., 2013). With the develop-
ment of autonomous vehicles, the complexity will fur-
ther increase, assuring a safe and comfort driving ex-
perience. To lower the system complexity in vehicles,
multi-core systems each replacing several single-core
ECUs are an intensive discussed topic and first ve-
hicles are on the road using multi-core architectures
(Arbeitskreis Multicore, BICCnet Innovationszirkel
Embedded Systems, 2011), (Macher et al., 2015).
The upcoming multi-core systems in the embedded
domain need a “parallel thinking” already from the
beginning of the system development. The hardware
and software for such systems have to be highly op-
timized, to be competitive. This makes it more im-
portant to have a proper design on early, more ab-
stract, design steps. To design embedded systems
many different models and stakeholders are neces-
sary and active during the design process (Gajski
et al., 2009). Concerning multi-core system devel-
opment, most projects use a bottom-up approach with
the shortcomings of understanding the big picture of
the system to allow a detailed analysis of the whole
system (Macher et al., 2015). Moreover, in such a de-
velopment process several stakeholders with different
views and concerns may be involved.
Using a model based approach to provide all
stakeholders with customized views during the devel-
opment process helps them in the course of achiev-
ing their engineering and optimization tasks. This
can be supported by using different abstraction levels,
starting with a high level view in the early stage to a
more detailed on a technical view in a later stage, to
manage complexity. The architecture description lan-
guage EAST-ADL supports such an approach by pro-
viding modeling means to express requirements, fea-
tures, functional components, timing and safety con-
straints and other engineering related information.
Our approach tries to support the system designer
during his architectural design decisions with a focus
on “parallel thinking”, starting from the requirements,
analyzing and parallelization of the logical and com-
ponent architectures to achieve partitions, based on
data dependencies, cycles etc. The partitioning shall
give the system designer a closer insight on how well
the architecture can be distributed, e.g., without hav-
ing a high communication overhead. This will be sup-
ported by calculating key figures of partitions. In ad-
dition, the set of components in a partition may be ex-
ecuted independently from components in other par-
Etzel, C. and Bauer, B.
Extending EAST-ADL for Modeling and Analysis of Partitions on Functional Architectures.
DOI: 10.5220/0007688301670176
In Proceedings of the 7th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2019), pages 167-176
ISBN: 978-989-758-358-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
167

titions. This allows the system designer to choose a
suitable hardware architecture for the developed log-
ical architecture. At current the EAST-ADL release
has no modeling notations to express partitions in-
dependent of the functional composition modeling.
Therefore, we introduce a possible extension of the
EAST-ADL and present two partitioning algorithms.
This paper is structured as follows. Section 2 gives
an introduction to EAST-ADL and the used partition-
ing algorithms to obtain parallel systems. In Section 3
we present our approach. This is followed (Section 4)
by the extension of EAST-ADL by meta-model ele-
ments to handle partitioning information. Section 5
shows how the algorithms are applied to our different
target abstraction levels to find partitions and which
parameters can be extracted from the partitions. The
approach is evaluated in a case study showing a brake-
by-wire system example (Section 6). The paper com-
pletes with the conclusion and giving an outlook for
further research.
2 PRELIMINARIES
This section introduces already existing languages,
methods and algorithms used in this paper.
2.1 EAST-ADL
The EAST-ADL (Blom et al., 2016) is an Architec-
ture Description Language with the focuses on the
automotive embedded electronic system engineering
problem domain, currently developed by the EAST-
ADL Association (EAST-ADL Association, 2018).
It is aligned with the established AUTomotive Open
System ARchitecture (AUTOSAR) standard (AU-
TOSAR, 2018) and extends it with higher levels of ab-
straction. While AUTOSAR’s most abstract concept
is the software architecture, the EAST-ADL provides
means to model the system architecture and capture
essential engineering information on this stage.
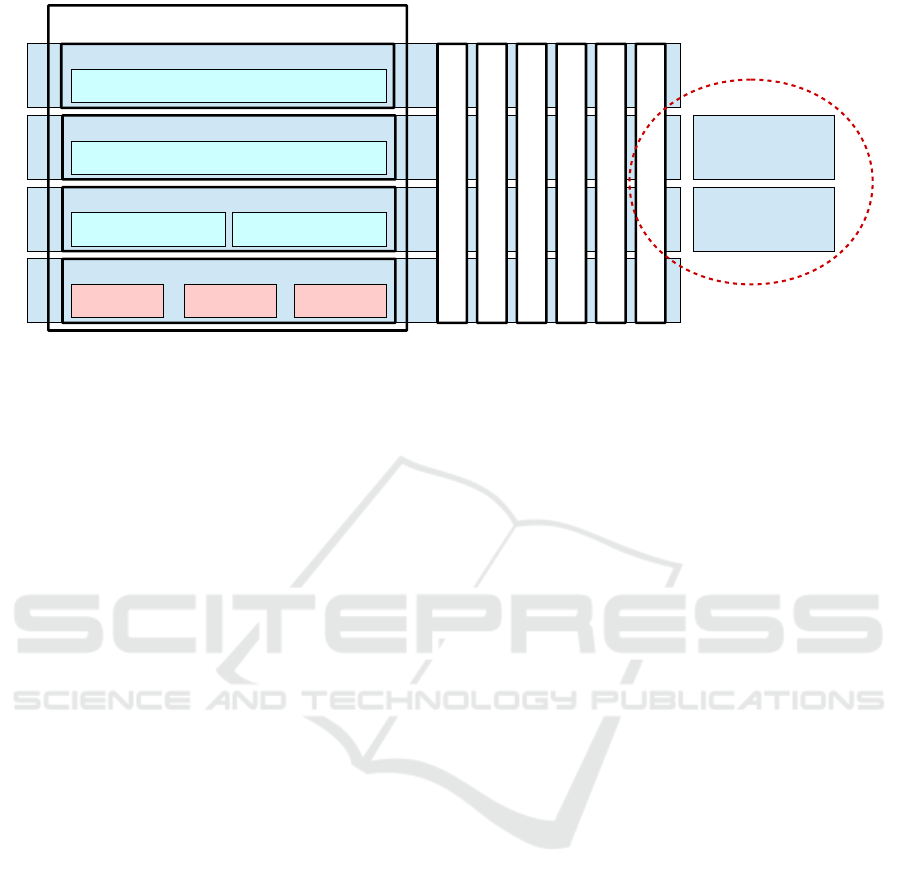
For this purpose the current release of the EAST-
ADL2 (EAST-ADL Association, 2013) has four lev-
els describing the system on different abstraction lev-
els and viewpoints (see left hand side of Figure 1. The
Vehicle Level includes a Technical Feature Model
of the electric and electronic system. It is a soft-
ware product line architecture by using decomposi-
tion and variability to allow different feature configu-
rations. The Analysis Level includes the Functional
Analysis Architecture (FAA). Features of the Vehi-
cle Level are realized by abstract functions and con-
nected through devices (e.g., sensors or actuators) to
the vehicle environment. The Design Level includes
the Functional Design Architecture (FDA) and the
Hardware Design Architecture (HDA). On these level
the abstract functions of the FAA are decomposed
with implementation-oriented aspects including mid-
dleware and hardware abstraction. The hardware de-
sign defines physical resources and their connection.
Functions from the FDA are allocated on entities of
the HDA. The Implementation Level is the connec-
tion to the AUTOSAR system model. The elements
of the Design Level are mapped to AUTOSAR enti-
ties (Qureshi et al., 2011). This supports traceability
over the whole development process.
Beside these abstraction levels, EAST-ADL is ex-
tended by several cross-cutting concern extensions,
which span over these layers. Examples for these
extensions are Environment, Requirements, Variabil-
ity and Timing. Figure 1 shows the abstraction lev-
els with their models horizontal and the extensions
(cross-cutting concerns) are vertically aligned over
all levels. The red circled extension Partitioning and
methods on the right side of the figure is our contribu-
tion, which is subject of this paper. For this reason, a
short description how the Functional Analysis Archi-
tecture (FAA) and the Functional Design Architecture
(FDA) are structured is provided. Both architectures
contain a component based architecture model to de-
scribe the system. FunctionTypes are abstract func-
tion component types to structure the system. An
instance of a FunctionType is a FunctionPrototype.
A FunctionType contains FunctionPorts, which can
be connected together using FunctionConnectors. To
enable hierarchical architectures, the specializations
of FunctionType on the Analysis and Design Level
(FunctionAnalysisType and FunctionDesignType can
own parts in form of FunctionAnalysisPrototypes re-
spectively FunctionDesignPrototypes. The Function-
Connectors between owned prototypes are called as-
sembly connection, while a connection between a port
of the type itself and a prototype is called delegation
connection.
The Design Level includes information of the
hardware system in the Hardware Design Architec-
ture (HDA). The HDA defines the connectivity, ca-
pabilities and basic safety characteristics of technical
architectures, e.g., the number of processors, cores
and the communication matrix. These information
can be expressed using the following elements from
the EAST-ADL modeling language: An execution
unit (ECU) is a HardwareComponentType, typed as
a Node. Cores are modeled as contained Hardware-
ComponentTypes of type Node inside an ECU. The
bus system type and its speed is defined using ports
(HardwarePortConnectors) on every ECU. The port
connectors are linked together using HardwareCon-
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
168
Environment Model
System Model
Vehicle Level
Analysis Level
Design Level
Implementation Level
Technical Feature Model
Functional Analysis Architecture
Functional Design Architecture Hardware Design Architecture
AUTOSAR
Application SW
AUTOSAR
Basic SW
AUTOSAR
HW
Requirements
Variability
Timing
...
Extensions
Partitioning
Methods
Modeling:
- Sequnce Diagrams
- Communication Diagrams
Analysis:
- Partitioning with SSC, SER
Analysis:
- Partitioning with SCC, SER
Focus of
research
Analysis:
- Partitioning with SCC, SER
Figure 1: EAST-ADL abstraction levels with the containing models and cross cutting extensions. On the right hand side the
partitioning extension and methods provided in this research.
nectors forming the bus system.
The EAST-ADL supports a linking between ele-
ments of different abstraction levels using the Real-
ization relationship. This allows a full traceability
over all abstraction levels.
In addition, it should be noted that the levels of the
EAST-ADL can be seen as the equivalents to usual
developing phases. E.g., the correspondence to the
V-Modell XT (Weit e.V., 2018) is as follows: the Ve-
hicle Level, including its feature models, is part of
the systems requirements analysis; the Analysis and
Design Level are used in the system analysis, sys-
tem architecture and system design phase; the Imple-
mentation Level belongs to the software architecture
phase. This last phase is not part of the paper, but
listed to have a complete and sound overview. The
ATESST2 project released a methodology guideline
(The ATESST2 Consortium, 2010) for the develop-
ment with EAST-ADL2. It defines a top-down devel-
opment process and we embed our partitioning anal-
ysis into it.
2.2 Partitioning Algorithms
To partition the architectures, two different algorithms
have been chosen. The strongly connected compo-
nents algorithm is a classical algorithm from graph
theory, while the extended single entry region algo-
rithm is a more recent publication dedicated to AU-
TOSAR systems.
2.2.1 Strongly Connected Components
An algorithm to find highly interconnected nodes in
directed graph is called strongly connected compo-
nents (SCC) analysis. A (sub-)graph is called strongly
connected if there exists a path between each pair of
nodes. A set of strongly connected components of
a graph form a partition representing a strongly con-
nected subgraph. Tarjan (Tarjan, 1972) presents defi-
nitions for strong connectivity in graphs and an algo-
rithm for computing the strongly connected compo-
nents. An application of the SCC algorithm on system
of systems to support architectural decision making is
shown by (Potts et al., 2017). Since feedback loops
are a common pattern in designing control systems,
we see potential in applying the SCC on the EAST-
ADL architectures.
2.2.2 Single Entry Region
The Single Entry Region (SER) analysis is introduced
by Kienberger et al. in (Kienberger et al., 2014) and
further refined in (Kienberger et al., 2016). It is based
on work of (Ottenstein and Ottenstein, 1984), (John-
son et al., 1994), (Tip, 1995) and (Gotz et al., 2009).
The idea is to identify regions having a loose coupling
to other parts of the system and therefore be kind of
isolated. Kienberger et al. describe SER as follows
for data dependencies between nodes:
• The number of nodes is greater or equal to two.
• All input dependencies from nodes outside the
SER are routed over a single “entry node”.
• Every node inside an SER is reachable from the
entry node, either direct or transitive.
It is performed on an AUTOSAR system description
model, namely on the component based architecture
formed by “Runnable Entities” (AUTOSAR’s atomic
executable and schedulable units) and their data de-
pendencies. From our point of view, the analysis
can be used for every appropriate type of dependency
in a graph. Since the AUTOSAR system descrip-
tion model is derived from the FDA on EAST-ADL’s
Extending EAST-ADL for Modeling and Analysis of Partitions on Functional Architectures
169

Design Level and the FDA and FAA are component
based architectures with data dependencies, we adopt
the SER analysis to EAST-ADL.
3 APPROACH
Our goal is to support the system designer during his
architectural design decisions in order to have an ar-
chitectural model, that is well suited for further fine-
grained development. Partitioning, in our context, is
the process of grouping the system under develop-
ment (SUD) into different parts without changing its
functional component based architecture. Therefore,
modeling elements are defined and used to structure
the system model elements based on the EAST-ADL
modeling concepts. The partitioning provides addi-
tional views on the SUD, depending on which criteria
it is performed. The main focus is on partitioning of
the Analysis Level as well as the Design Level.
Using the EAST-ADL, the goal is to keep the
EAST-ADL meta-model unchanged and extend it
only minimal invasive. This is achieved by introduc-
ing a new extension called “Partitioning” (see Fig-
ure 2), where meta-model elements are defined to ex-
press partitions and store additional information help-
ful for an analysis of the SUD, while not modifying
the FAA on the Analysis Level or the FDA on the De-
sign Level. For example, on the Analysis Level, the
SUD is described by the FAA by using functional de-
vices and analysis functions. The functional devices
are the connection to the environment; using sensors
to get data from the environment and actuators to in-
teract with it. Typically AnalysisFunctions link sen-
sors to actuators, by performing calculations on the
sensors data and react accordingly through the actu-
ators. The connection between the devices and func-
tions is modeled by ports to provide and receive data,
which are linked together with function connectors.
This component based description of the architecture
together with additional data defined in the extension
is used to determine partitions.
The extension of EAST-ADL and the analysis are
implemented in our tool. It is based on the Eclipse
Modeling Framework
1
, the Model Analysis Frame-
work
2
, EATOP
3
and Artop
4
.
1
Eclipse Modeling Framework (EMF) https://www.
eclipse.org/modeling/emf/
2
Model Analysis Framework - Data-flow based
model analysis (MAF) https://www.informatik.uni-
augsburg.de/en/chairs/swt/ds/projects/mde/maf/
3
EATOP Project https://www.eclipse.org/eatop/
4
AUTOSAR Tool Platform (Artop) https://www.artop.
org/
4 EXTENDING EAST-ADL WITH
PARTITIONING MODELING
Our approach has a strong focus on partitioning of the
different abstraction levels provided by EAST-ADL.
Since EAST-ADL structures the system model into
different abstraction levels we introduce distinct par-
titioning models for all levels of abstraction. While
these models are different on every abstraction level,
the meta-model elements are shared to support a com-
mon handling of partitioning in every use case. The
newly introduced elements are derived from already
specified elements in the EAST-ADL to be compat-
ible with it. In the following definitions, most ele-
ments from the EAST-ADL meta-model can be iden-
tified by the prefix “EA”, for example, EAElement and
EANumericalValue from the EAST-ADL infrastruc-
ture package. If an element has no prefix, it will be
indicated in the text. Building up on basic elements
of the EAST-ADL, allows the use of EAST-ADL real-
ization links to connect elements across different ab-
straction levels to achieve full traceability.
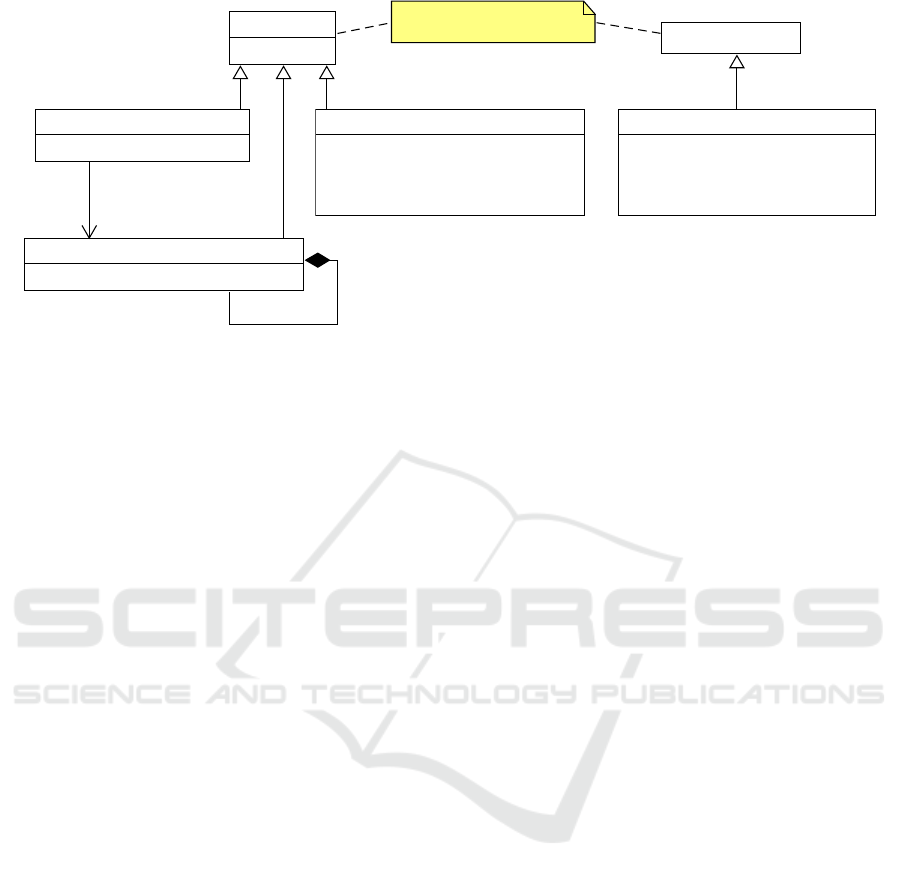
The developed meta-model elements to capture
partitions are visualized in Figure 2. The root of the
new elements is PartitionModel which links the ar-
chitectural description of one EAST-ADL level to the
partitioning architecture. It is derived from EAEle-
ment, which is an abstract meta class of the EAST-
ADL meta-model, defining an identifiable and named
element of the domain model. It can be identified by
using a global unique identifier called UUID, has an
expressive name and can contain comments for ad-
ditional descriptions. The partition model contains
two associations the targetLevel and partitionArchi-
tecture. The targetLevel is used to link the parti-
tion model to the level it partitions; i.e., the analysis
or design level object which are of the EAST-ADL
meta-model type SystemModel. The association par-
titionArchitecture points to the root package of the
partition architecture. Since the partitioning is done
independently on every abstraction level, only ele-
ments which are part of the target level are allowed
to be linked in the partition architecture and its chil-
dren.
Name: PartitionModel
Description: The PartitionModel is used to organize
the partition architecture of an abstraction level.
Generalizations: EAElement
Attributes: No additional attributes.
Associations
• targetLevel: SystemModel [1]
• partitionArchitecture: PartitionPackage [1]
Constraints: All (nested) referenced elements in the
partitionArchitecture shall be part of the refer-
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
170
These classes are from
the EAST-ADL meta-model.
TimingConstraint
EstimatedExecutionTime
element : FunctionPrototype [1]
average : TimingExpression [1]
bestCase : TimingExpression [0..1]
worstCase : TimingExpression [0..1]
EstimatedMemorySize
element : FunctionPrototype [1]
average : EANumericalValue [1]
upperBound : EANumericalValue [0..1]
lowerBound : EANumericalValue [0..1]
EAElement
name : String
PartitionPackage
elements : EAPackageableElement [0..*]
PartitionModel
targetLevel : SystemModel [1]
subPackages
0..*
1
partitionArchitecture
Figure 2: The “Partitioning” meta-model extension.
enced targetLevel.
Semantics: PartitionModel is the representation of a
nested set of partitions for a specific system de-
sign level.
PartitionPackages are used to assemble elements into
partitions. Even if it looks very similar to the descrip-
tion of the EAST-ADL meta-model element EAPack-
age, it cannot be derived from it. The reason is that an
EAPackage uses a composition to aggregate the con-
taining elements, while a PartitionPackage shall only
provide an association to the elements in the architec-
ture. The subPackages association contains sub parti-
tions and is realized using a composition. A Partition-
Package can contain multiple elements and packages
to achieve a hierarchical partition architecture.
Name: PartitionPackage
Description: The PartitionPackage is used to form
partitions of elements.
Generalizations: EAElement
Attributes: No additional attributes.
Associations
• elements: EAPackageableElement [0..*]
• subPackages: PartitionPackage [0..*] {comp.}
Constraints: No additional constraints
Semantics: PartitionPackages can be used to orga-
nize EAPackageableElements which form a par-
tition. The packages can be structured hierarchi-
cally, where each level may contain variable num-
ber of EAPackageableElements and sub packages
forming sub partitions.
In the EAST-ADL, the timing extension for exam-
ple, defines constraints and other modeling elements
to specify important requirements in the architecture.
Additionally to the structural description of the parti-
tioning, modeling elements are introduced to enrich
the functional architecture with information helpful
for analyzing in respect to partitioning. To allow a
more accurate partitioning of an architecture, two ad-
ditional elements are defined, describing estimated
values of memory and execution time.
The estimated memory size can be captured by
using the newly introduced meta-model element Es-
timatedMemorySize. It has an association to an ele-
ment in the system model and three values describing
its estimated average memory size in bytes and op-
tional upper/lower bound values to define a spectrum
the memory size varies.
Name: EstimatedMemorySize
Description: The estimated size of memory used by
the function in bytes.
Generalizations: EAElement
Attributes: No additional attributes.
Associations:
• element: FunctionPrototype [1]
• average: EANumericalValue [1]
• upperBound: EANumericalValue [0..1]
• lowerBound: EANumericalValue [0..1]
Constraints: If set, the values shall comply to
lowerBound ≤ average ≤ upperBound.
Semantics: The EstimatedMemorySize stores the es-
timated or measured average memory size in
bytes and optional an upper/lower bound.
The EAST-ADL timing extension describes an exe-
cution time constraint specifying the upper and lower
bound run-time of an event. We introduce an Es-
timatedExecutionTime element, storing estimated or
measured average execution time of a function and
optionally a best and worst case value. It is derived
from the element TimingConstraint and uses Timing-
Expressions to express the containing values. Both
elements are from the EAST-ADL timing package.
Name: EstimatedExecutionTime
Description: The estimated execution time of the
function.
Extending EAST-ADL for Modeling and Analysis of Partitions on Functional Architectures
171

Generalizations: TimingConstraint
Attributes: No additional attributes.
Associations
• element: FunctionPrototype [1]
• average: TimingExpression [1]
• bestCase: TimingExpression [0..1]
• worstCase: TimingExpression [0..1]
Constraints: If set, the values shall comply to
bestCase ≤ average ≤ worstCase.
Semantics: The EstimatedExecutionTime stores the
estimated or measured values of the average exe-
cution time and optional a best/worst case value.
In a SUD all three values have be in line with already
defined execution time constraints.
5 ANALYZING EAST-ADL
MODELS FOR PARTITIONS
In this section, we describe how the SCC and SER
algorithms are used to automatic search for partitions
on the architectures of the analysis and design level.
Partitions are formed by sets of functional compo-
nents and analysis is done independently on the anal-
ysis and design level. It is also possible to model par-
titions manually, by using the former described exten-
sion.
5.1 Parameters Influencing the Analysis
The analysis of the architectures can depend on more
than considering data dependencies. We identified
two different kinds of relevant clustering parameters
in our use cases: communication between functions
and resource usage of functions. Examples for the
communication perspective are the coupling between
functions or the utilization of connections. On the re-
source side execution time, execution frequency and
memory consumption are values of interest. The
newly introduced meta-model elements and already
available elements in the EAST-ADL enable to con-
sider these parameters in the analysis.
The Data Flow Weight describes the weight of
the data exchanged on one connection between two
nodes. Using EAST-ADL modeling language the
size of the transferred data can be provided via EA-
Datatype and the repetition of this transfer via func-
tion triggering stored in a FunctionTrigger. The
Function Computational Time Weight combines
our introduced EstimatedExecutionTime element to
estimate the computing time in conjunction with func-
tion triggering to get an idea how a processor is uti-
lized by a function. Using the newly specified Es-
timatedMemorySize, the Function Memory Weight
(either the binary size or the resource usage during
run-time including temporary memory usage) can be
used.
These parameters can either be used in partition
searching algorithms or to calculate key figures of
a partition. E.g., partitions can be rated by their
memory footprint summing up the Function Mem-
ory Weight of every component, or by their Function
Computational Time Weight, if it is assumed that
the set of one partition is executed sequentially. These
key figures are indicators for the system designer to
judge about the architecture and possibly perform a
refactoring.
5.2 Analysis Level
The analysis level includes an abstract functional rep-
resentation of the architecture captured in the FAA.
This architecture is designed very early in the devel-
opment process during the system analysis phase (The
ATESST2 Consortium, 2010). From a methodology
point of view, the partitioning shall be placed in the
development process after the task to specify the anal-
ysis function details. The result of partitioning analy-
sis can then be used to further refine the architecture
in an iterative way.
Before starting the analysis on the FAA, we have
implemented multiple model pre-checks in our tool,
such as if all directions of the ports and the binding to
the function connectors are reasonable. For example,
if two functions are connected via “IN” ports a warn-
ing is raised. The same applies to “OUT” ports. Ad-
ditionally, it should be noted that a client-server con-
nection in the model is interpreted as a bi-directional
connection between the components.
5.2.1 SCC Analysis
The first analysis implemented is the strongly con-
nected component search. The directed graph con-
sists of the analysis function prototypes as the vertices
and the function connectors as the directed edges be-
tween the vertices. Since the SCC algorithm analyzes
paths between the vertices only the communication
between the functions is used to form partitions.
The results of the strongly connected component
search is transferred into a partitioning model, where
a set of strongly connected functions forms a parti-
tion. For every detected set with more than one com-
ponent a PartitionPackage is created referring to the
containing functions. An example with three graphs
can be seen in Figure 3. The sets of strongly con-
nected components enclosing more than one element
are visualized with the same color. In the graph on
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
172

Figure 3: Three examples of graphs with strongly connected
components.
the bottom of the figure is a single element “Proto-
type3” not colored (white background), since it forms
a strongly connected set containing only itself and
sets with just one element do not need a distinct color.
5.2.2 SER Analysis
Another implemented algorithm is the Single Entry
Region (SER) analysis, which was developed for AU-
TOSAR system description models (Kienberger et al.,
2016). A brief general description can be found in
Section 2.2.2. We adapt the algorithm to fit to the
EAST-ADL analysis level. For this purpose, every
AnalysisFunctionPrototype contained in the FAA rep-
resents a node. The dependencies between the nodes
are formed by the function connectors between the
prototypes. The dependency weights are calculated
by using the introduced Data Flow Weight param-
eter and summing it for every connection between a
pair of nodes. The output of the algorithm are regions
containing sets of AnalysisFunctionPrototypes. This
gets transferred into the partitioning model such that
every calculated region forms one partition.
5.3 Design Level
The design level includes an implementation-oriented
functional model of the architecture captured in the
FDA. Looking into the design process, the FDA is
specified during the design phase in parallel with the
HDA (The ATESST2 Consortium, 2010). This newly
introduced partitioning step, shall be placed in the de-
velopment process after the task to specify the design
details, but before the allocation the functions to the
HDA. The result of partitioning analysis can then be
used to further refine the architecture in an iterative
way and as an input artifact to the HDA allocation
task.
Since the elements to model the FDA are very
similar to the ones used for the FAA, the SCC and
SER analysis are analogous to the analysis on the
FAA. The graphs are formed by function prototypes
and function connectors. Even the pre-checks and the
handling of client-server connections are identical.
By using a partition model of our analysis an en-
gineer can allocate functions to elements of the HDA.
Elements grouped into one partition by these two al-
gorithms are candidates to be allocated on one node,
because they communicate with each other. Placing
them on one node or closely connected nodes can re-
duce the communication overhead.
6 CASE STUDY -
BRAKE-BY-WIRE SYSTEM
EXAMPLE
To evaluate the proposed approach a case study on
an example architecture is carried out. Since space
is limited, only the SER analysis on the Analysis and
Design Level is shown in detail. It should be noted,
that the SCC analysis would not find partitions with
more than one component in this particular example.
Nevertheless, we picked this model, because it illus-
trates the SER analysis and the partition transition
during the development process very clearly.
The “brake-by-wire for four wheel vehicles”
model is originally from the EAST-ADL Association
and published on their website
5
.
The analysis architecture (see Figure 4) con-
sists of 16 components and 26 connections between
these. The main function is a pGlobalBrakeCon-
troller, which gets data from 4 wheel speed sensors,
the vehicle speed and the requested brake force. The
vehicle speed is calculated by the pVehSpeedEstima-
tor getting data from the wheel speed sensors. The
vehicle speed is provided to the pGlobalBrakeCon-
troller and the four ABS controllers. The brake force
is calculated by the pBrakeTorqueMap with data from
the pBrakePedalSensor. The four ABS controllers are
sending data to each brake actuator.
The colored components in Figure 4 are pro-
posed partitions of the SER algorithm. The up-
per green colored partition consists of two compo-
nents (pBrakePedalSensor and pBrakeTorqueMap),
the lower partitions are each formed by the ABS and
the brake actuator of one wheel.
5
Brake-by-Wire System II (http://www.east-adl.info/
Resources.html) (accessed January 16, 2019)
Extending EAST-ADL for Modeling and Analysis of Partitions on Functional Architectures
173
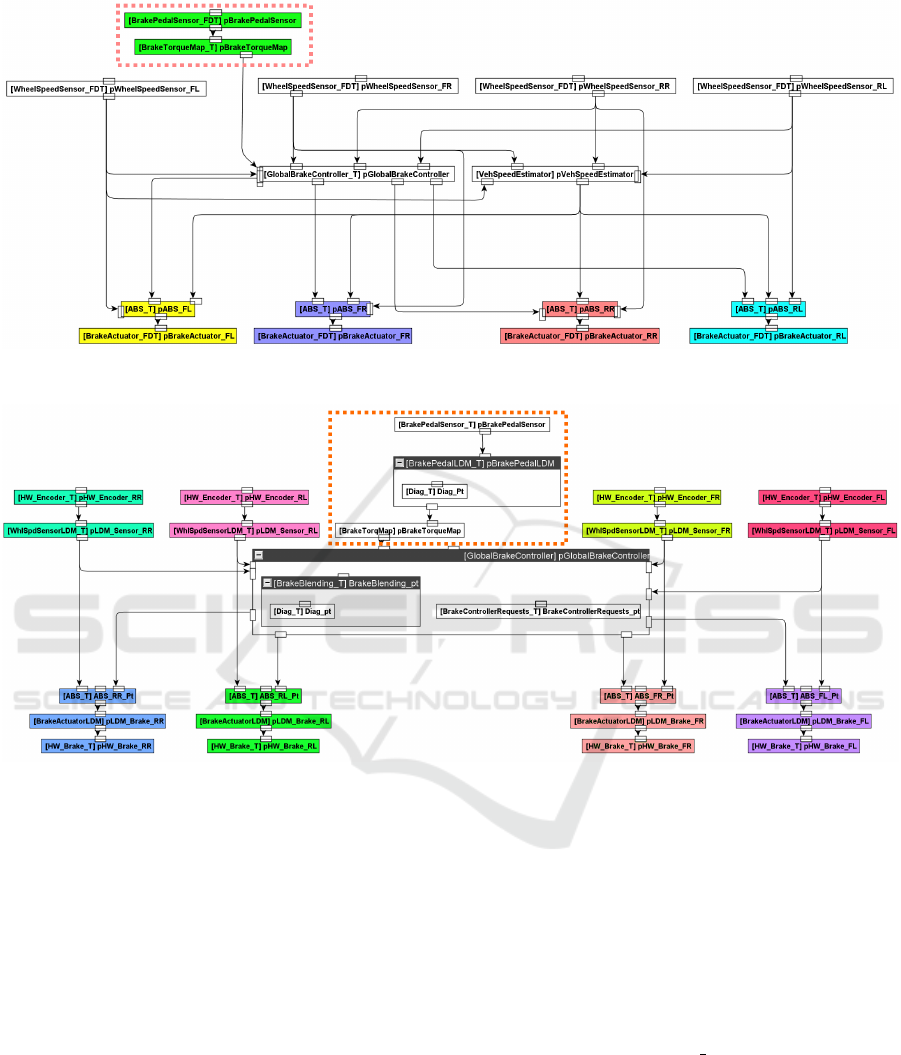
Figure 4: Functional Analysis Architecture of Brake-by-Wire Example with SER partitions of maximum size (colored ele-
ments).
Figure 5: Functional Design Architecture of Brake-by-Wire Example with SER partitions of maximum size (colored ele-
ments).
The design architecture (see Figure 5) is derived
from the functional analysis architecture. It contains
28 components and 27 connections (some compo-
nents are for diagnoses, their connections outside the
scope of this model example have been omitted). For
example, a wheel speed sensor from the functional
analysis architecture is now more detailed by using
two components. One is a hardware encoder provid-
ing the digital hardware signal and the other is a local
device manager (LDM) encapsulating the hardware
device specific parts. On the actuator side, a similar
detailing is performed by using a LDM and a hard-
ware function component for the realization. Two
components for diagnose tasks are also embedded in
the example. One is a diagnose component in the
pBrakePedalLDM and the other one in the pGlobal-
BrakeController.
The partitions found using the SER algorithm are
very similar to the ones on the analysis architecture.
On the bottom, every ABS component together with
a LDM and the actuator form a partition. Four new
partitions are originated from the decomposition of
the wheel speed sensors into hardware encoders and
LDMs. A difference can be seen looking at the for-
mer partition of the pBrakePedalSensor and pBrake-
TorqueMap, which is for a better recognition marked
with a square of orange dots in both figures. Because
a diagnose component (Diag Pt), which provides data
to other components not visible in this figure, is em-
bedded in the pBrakePedalLDM, it is not marked as
a potential partition on this level. An option to in-
/excluding diagnose components in the analysis is
part of our framework. Turning it off, would clearly
mark it as a partition containing the components
pBrakePedalSensor, pBrakePedalLDM and pBrake-
TorqueMap. Since there is no flag in the EAST-ADL
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
174

meta-model to identify diagnose components, we are
using a naming schema (the prefix “Diag ”) to recog-
nize these components. Using our analysis results an
engineer can check if the transition from the analysis
architecture to the design architecture is sound (e.g.,
having a closer look, why one partition is now miss-
ing) and link the partitioned elements to elements of
the HDA.
7 RELATED WORK
Marinescu et al. (Marinescu and Enoiu, 2012) pro-
pose a modeling extension for EAST-ADL and model
analysis with the focus on resource-usage. The anal-
ysis are applied on the FDA using a priced timed au-
tomata to predict resource usage and optimizing re-
source utilization. In contrast to our approach, theirs
is focusing on resource usage and allocation, while
ours is proposing a general extension to describe par-
titions and algorithms focusing on the analysis of data
dependencies. A mapping of parts of our extension to
theirs is possible, e.g., EstimatedMemorySize (ours)
to MemoryConstraint (theirs). In the development
process, their resource-usage analysis is placed after
ours during the development of the design level ele-
ments.
Automation of certain design processes steps en-
ables system designers to focus on the challenging
parts. Walker et al. (Walker et al., 2013) have de-
veloped a multi-objective optimization approach for
EAST-ADL system architectures. Our algorithms
could be connected into their framework by an Analy-
sis Wrapper and provide results to the optimization
engine. However, there has to be done further re-
search how to derive quantitative criteria for the op-
timizer from the partitioning models.
8 CONCLUSION AND FURTHER
RESEARCH
In this paper we presented an approach to support sys-
tem designers during the development process by do-
ing partitioning on functional architectures. There-
fore, we extended the EAST-ADL meta-model min-
imal invasive with an extension to capture partitions.
Beside the structural partitioning model, the extension
introduces two elements to improve the search and
rating of partitions. To support automated analysis,
we presented the SCC and SER algorithm to search
for partitions on the FAA and FDA. Both algorithms
may be used without the partitioning extension, if no
persistence of the partitions is needed to perform fur-
ther analysis. Moreover, we applied the new approach
to a small case study from the EAST-ADL consor-
tium.
The first results concerning our approach are very
promising and in the next steps we will evaluate it
with additional scenarios. Moreover, we will de-
velop more sophisticated algorithms for partitioning
of functional models on these levels of abstraction.
We think the proposed approach is not limited to
the EAST-ADL modeling language and can be trans-
ferred to similar concepts even outside the automotive
domain. Examples for other languages are SysML
6
and AADL
7
, both strongly influenced the EAST-ADL
specification (Blom et al., 2016).
ACKNOWLEDGEMENTS
This work was partially funded within the project
ARAMiS II by the German Federal Ministry for Edu-
cation and Research with the funding ID 01IS16025.
The responsibility for the content remains with the au-
thors.
REFERENCES
Arbeitskreis Multicore, BICCnet Innovationszirkel
Embedded Systems (2011). Relevanz eines
Multicore-
¨
Okosystems f
¨
ur k
¨
unftige Embedded
Systems: Positionspapier zur Bedeutung, Bestand-
saufnahme und Potentialermittlung der Multicore-
Technologie f
¨
ur den Industrie- und Forschungsstan-
dort Deutschland. URL: https://www.bicc-net.de/
workspace/uploads/subfeatures/downloads/positions
papier multicore oeko-53077aea8dd0c.pdf.
AUTOSAR (2018). AUTOSAR website. https://www.auto
sar.org/ (accessed January 16, 2019).
Blom, H., De-Jiu, C., Kaijser, H., L
˜
A¶nn, H., Papadopou-
los, Y., Reiser, M.-O., Kolagari, R. T., and Tucci, S.
(2016). EAST-ADL: An architecture description lan-
guage for automotive software-intensive systems in
the light of recent use and research. International
Journal of System Dynamics Applications (IJSDA),
5(3):1–20.
EAST-ADL Association (2013). EAST-ADL Domain
Model Specification. Version V2.1.12.
EAST-ADL Association (2018). EAST-ADL web-
site. http://www.east-adl.info/ (accessed January 16,
2019).
Gajski, D. D., Abdi, S., Gerstlauer, A., and Schirner, G.
(2009). Embedded system design: Modeling, synthe-
6
Issued by the OMG, http://www.omgsysml.org/
7
Issued by the SAE International, http://www.aadl.info/
Extending EAST-ADL for Modeling and Analysis of Partitions on Functional Architectures
175

sis and verification. Springer, Dordrecht and New
York.
Gotz, M., Roser, S., Lautenbacher, F., and Bauer, B. (2009).
Token analysis of graph-oriented process models. In
13th Enterprise Distributed Object Computing Con-
ference Workshops, pages 15–24.
Johnson, R., Pearson, D., and Pingali, K. (1994). Program
structure tree: Computing control regions in linear
time. In Proceedings of the ACM SIGPLAN Confer-
ence on Programming Language Design and Imple-
mentation (PLDI), pages 171–185. ACM.
Kienberger, J., Minnerup, P., Kuntz, S., and Bauer, B.
(2014). Analysis and validation of AUTOSAR mod-
els. In Proceedings of the 2nd International Confer-
ence on Model-Driven Engineering and Software De-
velopment, MODELSWARD 2014, pages 274–281,
Portugal. SCITEPRESS - Science and Technology
Publications, Lda.
Kienberger, J., Saad, C., Kuntz, S., and Bauer, B. (2016).
Efficient parallelization of complex automotive sys-
tems. In Balaji, P. and Leung, K.-C., editors, Pro-
ceedings of the 7th International Workshop on Pro-
gramming Models and Applications for Multicores
and Manycores, pages 40–49. ACM.
Lukasiewycz, M., Steinhorst, S., Andalam, S., Sagstetter,
F., Waszecki, P., Wanli Chang, Kauer, M., Mundhenk,
P., Shanker, S., Fahmy, S., and Chakraborty, S. (2013).
System architecture and software design for electric
vehicles. In IEEE, editor, Design Automation Confer-
ence (DAC), 2013 50th ACM / EDAC / IEEE, pages
1–6.
Macher, G., H
¨
oller, A., Armengaud, E., and Kreiner, C.
(2015). Automotive embedded software: Migration
challenges to multi-core computing platforms. In
IEEE 13th International Conference on Industrial In-
formatics (INDIN), pages 1386–1393.
Marinescu, R. and Enoiu, E. P. (2012). Extending EAST-
ADL for modeling and analysis of system’s resource-
usage. In IEEE 36th Annual Computer Software and
Applications Conference Workshops, pages 532–537.
Ottenstein, K. J. and Ottenstein, L. M. (1984). The program
dependence graph in a software development environ-
ment. SIGPLAN Not., 19(5):177–184.
Potts, M., Sartor, P., Johnson, A., and Bullock, S. (2017).
Hidden structures: using graph theory to explore com-
plex system of systems architectures. International
Conference on Complex Systems Design & Manage-
ment. CSD & M.
Pretschner, A., Broy, M., Kruger, I. H., and Stauner, T.
(2007). Software engineering for automotive systems:
A roadmap. In Future of Software Engineering, pages
55–71.
Qureshi, T. N., Chen, D., L
¨
onn, H., and T
¨
orngren, M.
(2011). From EAST-ADL to AUTOSAR software
architecture: A mapping scheme. In Crnkovic, I.,
Gruhn, V., and Book, M., editors, Software Archi-
tecture, pages 328–335, Berlin, Heidelberg. Springer
Berlin Heidelberg.
Tarjan, R. (1972). Depth-first search and linear graph algo-
rithms. SIAM Journal on Computing, 1(2):146–160.
The ATESST2 Consortium (2010). Methodology guideline
when using EAST-ADL2. Deliverable D5.1.1 V1.1.
Tip, F. (1995). A survey of program slicing techniques.
Journal of Programming Languages, 3:121–189.
Walker, M., Reiser, M.-O., Tucci-Piergiovanni, S., Pa-
padopoulos, Y., L
¨
onn, H., Mraidha, C., Parker, D.,
Chen, D., and Servat, D. (2013). Automatic optimisa-
tion of system architectures using EAST-ADL. Jour-
nal of Systems and Software, 86(10):2467–2487.
Weit e.V. (2018). V-Modell XT: Das deutsche Referenz-
modell f
¨
ur Systementwicklungsprojekte Version 2.2.
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
176
