
An Experimental Evaluation of Design Space Exploration of
Hardware/Software Interfaces
Thomas Rathfux
1
, Hermann Kaindl
1
, Ralph Hoch
1
and Franz Lukasch
2
1
Institute of Computer Technology, TU Wien, Vienna, Austria
2
Robert Bosch AG, G
¨
ollnergasse 15-17, Vienna, Austria
Keywords: Model-driven Engineering, Design Space Exploration, Reuse, Heuristic Search, Hardware/Software Inter-
faces.
Abstract:
We observe ever increasing variability of hardware/software interfaces (HSIs), e.g., in automotive systems.
Hence, there is a need for the reuse of already existing HSIs. In this regard, an important question is whether
automated adaptation of an already existing HSI to one that fulfills the requirements on a new HSI is feasible in
industrial practice. Ideally, the number of adaptation steps should be minimal, so that new hardware production
can be avoided. In this paper, we address the problem of finding such an optimal solution for a given specific
HSI and a set of formally specified requirements on a new HSI. We propose using design space exploration
employing (heuristic) search with optimality guarantees. Hence, a meta-model of such HSIs has been created
together with transformation rules. Based on all that, an experimental evaluation of this approach shows its
feasibility for realistic HSIs.
1 INTRODUCTION
Software has become increasingly important in
cyber-physical systems, which are actually software-
intensive systems in many domains. For instance, in
today’s cars electronic control units (ECUs), i.e., em-
bedded systems are ubiquitous in large numbers.
One important functionality of such ECUs is that
they serve as hardware/software interfaces (HSIs).
Both sensors and actuators are connected to ECUs,
and the HSIs need to make sure that the respective sig-
nals are correctly represented in the software. For ex-
ample, in an automotive system like a car, a pedal po-
sition sensor is connected to the corresponding ECU.
Some pedal position sensors deliver analogue, others
digital signals. Depending on what kind of sensor is
being connected to the ECU, a differently configured
HSI must be used.
Since there are many variations possible like that,
a variability problem has become important. This
variability can be addressed by reuse. One possibil-
ity is to take already existing HSI specifications as
reusable assets, and to attempt reusing them by au-
tomated adaptation of an already existing HSI (more
precisely, its specification) to one that fulfills the re-
quirements on a new HSI.
For finding such a new HSI, (heuristic) search
may be employed, see, e.g., (Pearl, 1984). It tries out
different adaptation possibilities and, once it comes
across an HSI that fulfils the requirements, it has
found a solution. Of course, the requirements must
be available in a formal representation, which can be
used as goal conditions for the search.
This is reminiscent of search-based software en-
gineering, a notion coined in (Harman and Jones,
2001). Usually, search approaches such as genetic al-
gorithms are employed there for finding solutions to
very complex problems, but they cannot normally find
optimal solutions. Even if they find optimal solutions,
they cannot prove that these solutions are indeed op-
timal.
Actually, the search space must be formally rep-
resented as well, in terms of its states and its possible
transformations from one state to the other. Program-
ming such a search space directly, as often done for
puzzles and games, would take unreasonable effort,
however. Model-driven engineering offers the possi-
bility of representing such a search space by defining
meta-models and transformation rules. More specifi-
cally, we use the approach to design space exploration
as exemplified in VIATRA2 (Hegedus et al., 2011).
Since for cost reasons hardware production should
be kept minimal, the number of adaptation steps
should be kept minimal. Hence, we need to em-
Rathfux, T., Kaindl, H., Hoch, R. and Lukasch, F.
An Experimental Evaluation of Design Space Exploration of Hardware/Software Interfaces.
DOI: 10.5220/0007689002890296
In Proceedings of the 14th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE 2019), pages 289-296
ISBN: 978-989-758-375-9
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
289
ploy search for optimal solutions, i.e., sequences of
adaptation steps with a guaranteed minimum number
of steps. Unfortunately, such a search typically has
exponential complexity, in our case with an average
branching degree of about one-hundred.
This raises the question of whether this approach
is feasible under realistic conditions such as those in
industrial practice. For answering this question, we
performed an experimental evaluation with a model
realistic for automotive systems, more precisely a
meta-model, for enabling design space exploration.
The remainder of this paper is organized in the fol-
lowing manner. First, we provide some background
and discuss related work, in order to make the paper
self-contained. Then we present our (meta-)modeling
approach for design space exploration of HSIs. Based
on that, we explain our search approach and define our
heuristic function. After that, we present our experi-
ment using (heuristic) search and its results. Finally,
we conclude and indicate future work.
2 BACKGROUND AND RELATED
WORK
First, we sketch the ECUs that our HSIs are imple-
mented on, and the essence of the HSIs themselves
as far as needed for this paper. Then we refer to the
model-driven tool VIATRA2, which we use for de-
sign space exploration. Since we perform this explo-
ration using heuristic search, we also explain it here
briefly.
2.1 ECUs and HSIs
ECUs are commonly used to provide functionality of
hardware and software components for external sys-
tems that they are embedded in, e.g., in the automo-
tive domain. For this purpose, each ECU provides an
HSI, which enables external hardware components to
interact with internal software functions. This soft-
ware typically runs on a microcontroller and uses var-
ious resources, which are made available through the
pins of the microcontroller.
An ECU may contain different building blocks,
but commonly includes a microcontroller and its in-
ternal resources alongside with its pins, hardware
components for signal processing and ECU pins. In-
ternally, these building blocks are (potentially) con-
nected to others through the wiring of the ECU. For
external connections to other hardware, the ECU pins
are used (and not directly the microcontroller pins).
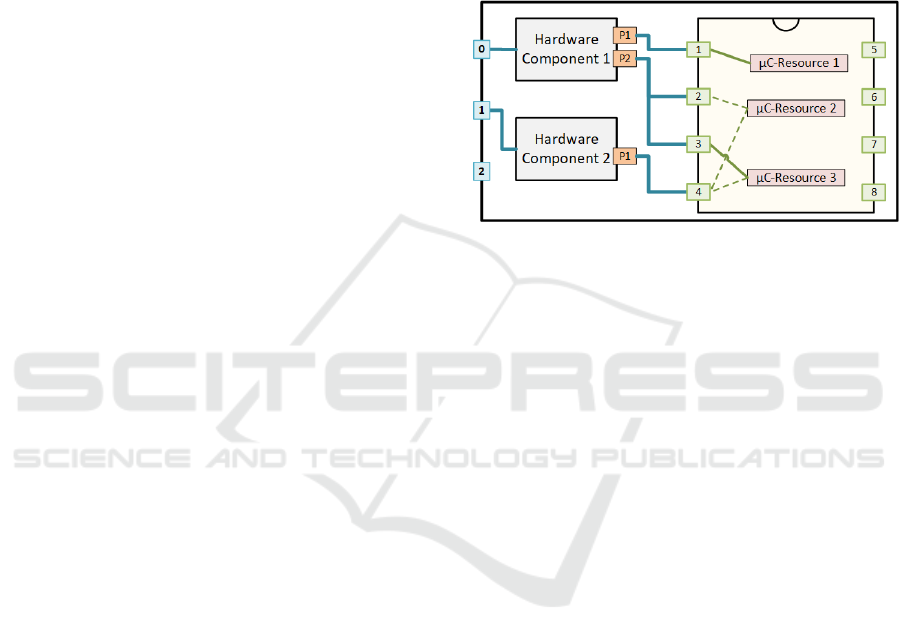
Figure 1 shows the building blocks of a typical
ECU as used in the automotive domain, as well as
their connections. On the right, the microcontroller
is depicted, which contains the possible connections
between its pins and its resources. Note, that this fig-
ure only illustrates the essential structure, while a real
ECU has many more building blocks and connections
between them, and many more resources and their
connections within the microcontroller. Hence, a real
ECU is both larger and more complex, but for the pur-
poses of the explanations in this paper, this schematic
illustration should be sufficient.
Figure 1: Schematic illustration of an ECU and its HSI.
Apart from the microcontroller, which runs the
software, the hardware components represent any
type of hardware that is used to process input or out-
put signals (e.g., power output states, low- or high-
pass filters). They are both connected to ECU pins
and to one or more microcontroller pins (µC-pins).
The latter connections are through ports (e.g., P1,
P2), and define the microcontroller resources (e.g.,
µC-Resource 1, µC-Resource 2) that are potentially
available at a port. The microcontroller makes its re-
sources accessible through its µC-pins. One resource
may be connected to several µC-pins, and one µC-pin
to several resources.
It is very important for defining HSIs, that inside
the microcontroller certain of these connections can
be configured through activating some of the poten-
tial connections, or not. Figure 1 illustrates poten-
tially available connections as dashed lines, and cur-
rently activated connections as bold solid lines. Such
resources can be an analogue digital converter (ADC),
timer input module (TIM), etc. For example, in Fig-
ure 1, µC-Resource 2 is connected to µC-pin 2 and
µC-pin 4.
It is important that the right resources are con-
nected to some hardware component so that it can
provide a certain interface type, such as analogue
measurement of input signals, pulse width modula-
tion measurement, etc. All hardware components to-
gether with their connected resource configurations
define an HSI, where the software communicates with
the configured resources in terms of digital informa-
tion.
ENASE 2019 - 14th International Conference on Evaluation of Novel Approaches to Software Engineering
290

2.2 VIATRA2
VIATRA2 is a model-driven framework for design
space exploration. This framework supports defin-
ing search strategies for traversing the design space,
starting from an initial model by applying rules.
VIATRA2 allows defining rules based on the meta-
model used. They are applied throughout the search
to explore the design space. Goals are defined as con-
ditions that must be satisfied for a solution.
VIATRA2 as used in our work presented here, is
actually just one tool of a set of tools developed over
time, where different tools provide different tech-
niques for design space exploration (Bergmann et al.,
2015).
2.3 Heuristic Search for Optimal
Solutions
Many search algorithms have been presented in the
literature, so it would be prohibitive to review all of
them here. Rather, we focus on those we use in the
experiment reported in this paper, a (unidirectional)
search algorithm with certain optimality guarantees
and a special case of it.
The traditional best-first search algorithm A*
(Hart et al., 1968) maintains the set OPEN of so-called
open nodes that have been generated but not yet ex-
panded, i.e., the frontier nodes. Much as any best-
first search algorithm, it always selects a node from
OPEN with minimum estimated cost, one of those it
considers “best”. This node is expanded and moved
from OPEN to CLOSED. A* specifically estimates the
cost of some node n with an evaluation function of
the form f (n) = g(n) + h(n), where g(n) is the (sum)
cost of a path found from s to n, and h(n) is a heuris-
tic estimate of the cost of reaching a goal from n, i.e.,
the cost of an optimal path from s to some goal t. If
h(n) never overestimates this cost for all nodes n (it
is said to be admissible) and if a solution exists, then
A* is guaranteed to return an optimal (minimum-cost)
solution (it is also said to be admissible). Under cer-
tain conditions, A* is optimal over admissible unidi-
rectional heuristic search algorithms using the same
information, in the sense that it never expands more
nodes than any of these (Dechter and Pearl, 1985).
Since A* needs an admissible heuristic evaluation
function, which is often not easy to find for problems
in industrial practice, let us also mention the special
case of A* without using heuristic knowledge, i.e.,
h(n) ≡ 0, or simply f (n) = g(n). In the special case
of unit costs, i.e., the cost of each step on each path is
exactly 1, this implements breadth-first search. Note,
that breadth-first search can also be implemented by
the traditional shortest-path algorithm due to (Dijk-
stra, 1959).
3 MODELING APPROACH
First, we present (part of) our meta-model as used by
VIATRA2 for design space exploration. In order to
enable it, we next define transformation rules based
on this meta-model, and goal conditions as given in
formally specified requirements for a new HSI. Fi-
nally, we explain how the search approach is im-
plemented in VIATRA2, and define our admissible
heuristic for guaranteeing optimal solutions.
3.1 Meta-model
Based on the sketch of the application domain above,
we specify here in the meta-model generically what
is needed for design space exploration. This meta-
model covers the structure of an ECU, the possible
variations for activating connections for a configura-
tion, and the currently selected configuration. Since
the searches for design space exploration must know
when a solution is found, they must be given goal con-
ditions. These are defined in the formally represented
Requirements, which are also generically included in
the meta-model. Technically, we created this meta-
model in Ecore and the Eclipse Modeling Framework
(EMF) (Eclipse, 2017; Steinberg et al., 2009), as this
meta-modeling approach is directly supported by the
VIATRA2 tool.
Figure 2 shows selected parts of the meta-model
that are essential for the purpose of explaining the
design space exploration. The following classes and
their associations define the application domain: ECU
pins (EcuPin), hardware components (HardwareCom-
ponent, HardwareComponentPort) and the micro-
controller (Microcontroller, McResource, McHwPin,
McPin, McPinConnection). Each instance of a Hard-
wareComponent is connected to a McPin instance
through HardwareComponentPort instances. The
same applies for the McResources of the Micron-
troller and the Ecu. Different interface types on hard-
ware components are expressed via the interfaceType
attribute of the HardwareComponent class.
Each instance of the meta-model represents a spe-
cific ECU model (and the Requirements on its HSI).
Actually, it also has the HSI configuration defined,
i.e., such an instance represents a specific state in the
search for design space exploration.
In addition, the meta-model defines all the possi-
bilities for variation and what is needed for defining
the transformation rules, see below. The variations
An Experimental Evaluation of Design Space Exploration of Hardware/Software Interfaces
291
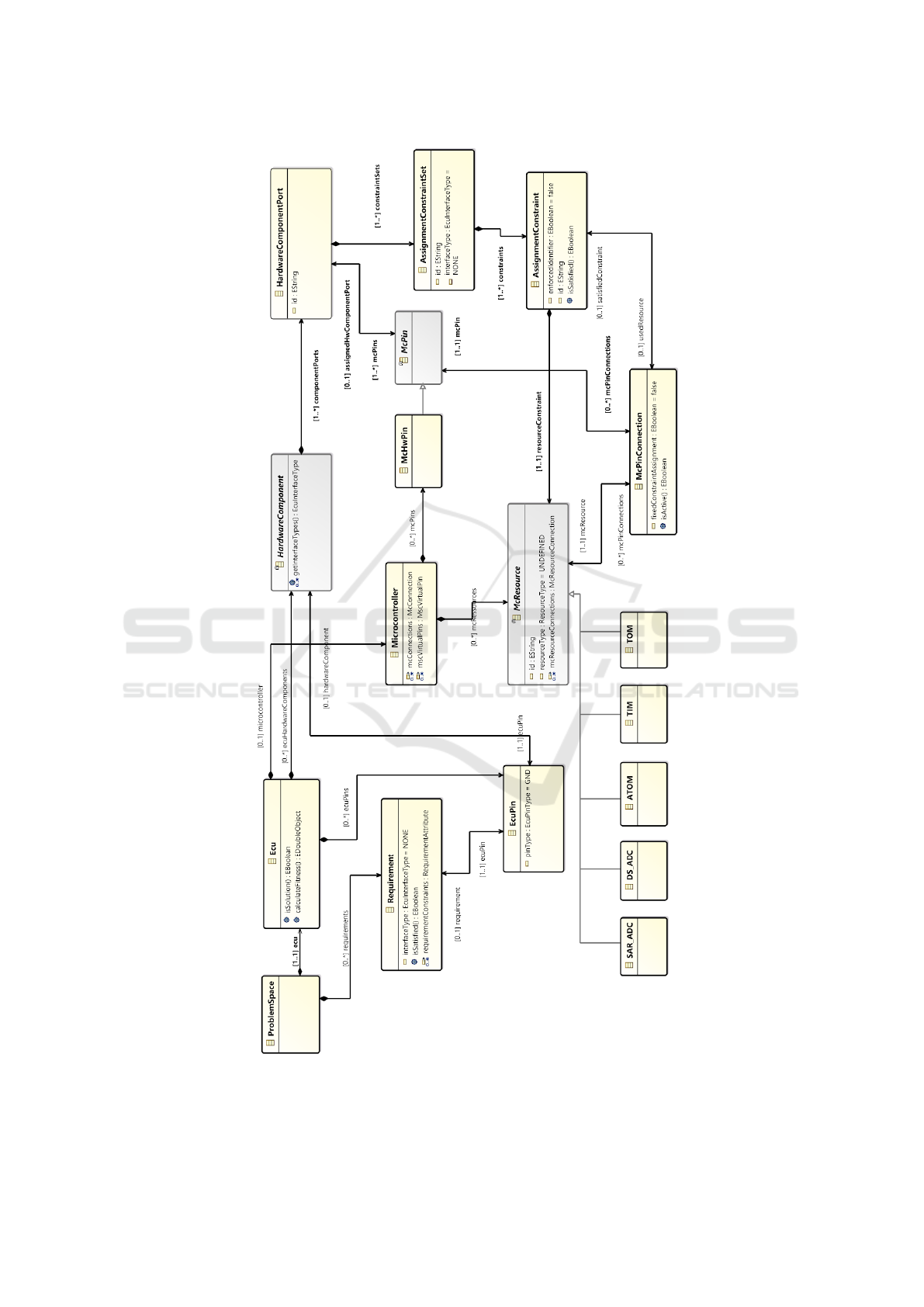
Figure 2: Selected parts of our meta-model.
ENASE 2019 - 14th International Conference on Evaluation of Novel Approaches to Software Engineering
292
are expressed through instances of the McPinConnec-
tion class, which connects instances of McResources
to instances of McPins and, consequently, to Hard-
wareComponentPorts. For defining transformation
rules, it is necessary to specify what kind of resources
are needed by hardware components. In the meta-
model, this is represented by the classes Assignment-
ConstraintSet and AssignmentConstraint. Each Hard-
wareComponentPort may contain several Assign-
mentConstraintSets with AssignmentConstraints and
one specific AssignmentConstraint specifies which
(type of) McResource is needed. This restricts the
variability of HSIs.
The currently configured HSI is defined through
the association usedResource, which specifies if a
connection to a resource is activated or not. It links
McResources on McPins through McPinConnections
and AssignmentConstraint(Set)s to HardwareCompo-
nentPorts, and, consequently, to EcuPins. Each value
change on usedResource transforms a state in the
search for design space exploration to another state.
Formally represented Requirements specify the
goal conditions. Each Requirement is associated with
a specific EcuPin and contains an attribute of type
EcuInterfaceType for specifying what kind of inter-
face is required on this pin.
3.2 Transformation Rules
Based on the variation expressed in the meta-model,
we defined transformation rules in VIATRA2 (using
its query language). Essentially, they model two kinds
of transformations, one for activating a connection in
a configuration, and one for deactivating a connec-
tion.
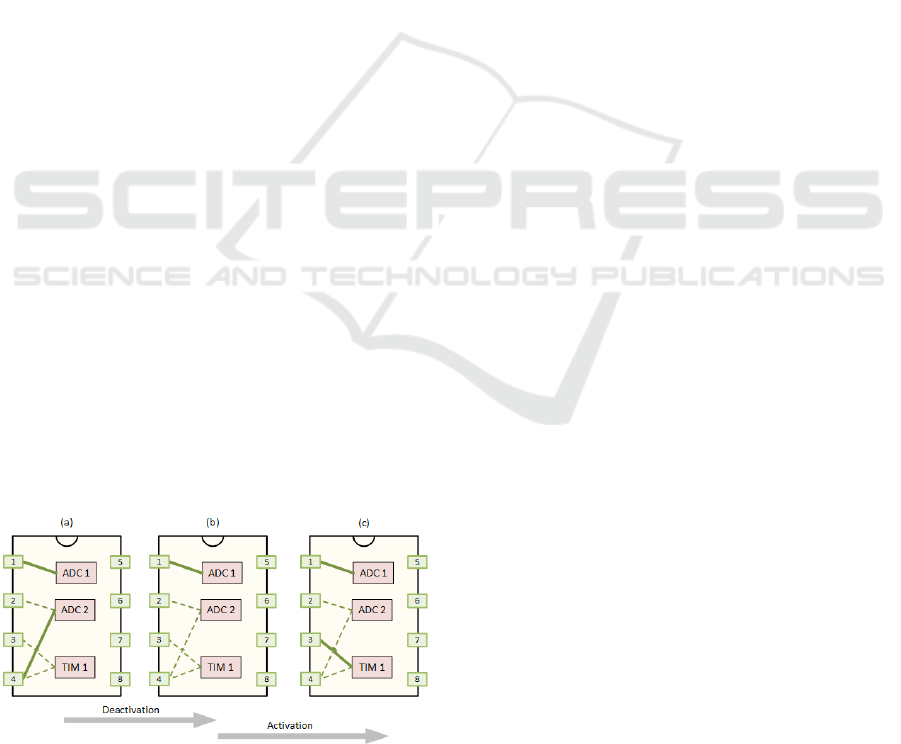
Figure 3 illustrates both kinds of transformation
rules. The transition from (a) to (b) shows the deacti-
vation of the connection from µ-pin 4 to ADC 2, the
transition from (b) to (c) the activation of the connec-
tion from µ-pin 3 to TIM 1.
Figure 3: Illustration of transformation rules for HSIs.
However, as hardware components have specific
assignment constraints, not all connections are acti-
vated or deactivated arbitrarily. Each transformation
is only applied in the course of the search if it may
lead to satisfying a goal condition, i.e., fulfilling a
given requirement.
Technically, such a transformation rule as defined
in VIATRA2 consists of three parts: pre-condition,
transformation and post-condition. The pre-condition
specifies the applicability of a transformation rule, in
our application in terms of the constraints of Hard-
wareComponentPorts. The transformation specifies
the changes in the model, i.e., the instance of the
meta-model that the transformation rule is applied to.
The post-condition specifies the result of the rule ap-
plication as a condition defined according to the meta-
model.
3.3 Goal Condition
As indicated above, a goal condition for a search is
defined by Requirements (as specified in our meta-
model). In general, more than one Requirement is
given in this way, and a solution is only found, if
and when all corresponding conditions are satisfied.
That is, a goal condition is a conjunction of condi-
tions given by Requirements.
Depending on the EcuInterfaceType attribute of
a given Requirement, the HardwareComponent at
the specific EcuPin that this Requirement is associ-
ated with needs to fit. Consequently, all constraints
of this HardwareComponent have to be fulfilled as
well. This requires the fulfillment of Assignment-
ConstraintSets on HardwareComponentPorts as they
also depend on the EcuInterfaceType. One EcuInter-
faceType may be supported by more than one Assign-
mentConstraintSet. In addition, one HardwareCom-
ponent and its HardwareComponentPorts may sup-
port more than one EcuInterfaceType. Thus, spec-
ifying more than one AssignmentConstraintSet per
HardwareComponentPort, each related to a different
EcuInterfaceType, is also possible. If at least one of
these AssignmentConstraintSets is fulfilled for a spe-
cific EcuInterfaceType on all Ports, then also the spe-
cific Requirement is fulfilled and, therefore, the corre-
sponding part of the goal condition. That is, all ports
of a HardwareComponent are connected via conjunc-
tion and all AssignmentConstraintSets of a port are
connected via disjunction.
However, the AssignmentConstraints of a partic-
ular AssignmentConstraintSet have all to be fulfilled.
Hence, they are connected via conjunction.
Summarizing, one goal condition of a specific
EcuInterfaceType is logically expressed in disjunctive
normal form. If one part of the disjunctive normal
form is fulfilled, then the interface type may be used.
An Experimental Evaluation of Design Space Exploration of Hardware/Software Interfaces
293

This corresponds to one Requirement only, however.
Hence, such a disjunctive normal form has to be ful-
filled for each and every Requirement.
4 SEARCH APPROACH
With this modeling approach, a search space is
defined for design space exploration using the
VIATRA2 tool. The transformation rules can be
chained together in sequences. Figure 3 shows an ex-
ample where first a deactivation of one connection is
followed by the activation of another one. In this way,
several adaptations of an HSI design can be achieved
in a model. A sequence of transformations that con-
nects a start configuration of an already existing HSI
with another one that satisfies a goal condition de-
fined through given Requirements is a solution. For
example, it may be necessary to deactivate a connec-
tion and activate several others in succession. A so-
lution with minimal cost, in our case a minimal num-
ber of transformations is an optimal solution. Since
finding a solution, in particular an optimal one, is
not straight-forward, in general, alternative transfor-
mations need to be investigated, and this leads to a
search in this space. For this design space exploration,
our search approach is breadth-first search (without
heuristic) and A* (with heuristic) as reviewed above.
Such a search for an optimal solution typically has
exponential complexity, in our case with an average
branching degree of about one-hundred. Hence, this
search space is very large for realistic HSIs. Fortu-
nately, it has important properties that need to be uti-
lized for making such searches feasible. Figure 4(a)
illustrates a cycle. It may simply occur after acti-
vating a particular connection in the configuration of
state S1 and subsequently deactivating the very same
connection in the configuration of state S2. This re-
sults in state S5, which is the same as state S1, of
course. Therefore, further search below S5 is not nec-
essary and can be pruned. Figure 4(b) illustrates a
directed acyclic graph (DAG), where the same state
S5/S6 is visited more than once, when reached from
the root S1 via two (or, in general, several) different
paths. This may simply occur after activating a par-
ticular connection c
1
in the configuration of state S1
and subsequently deactivating another connection c
2
in the configuration of state S2, where deactivating
c
2
in the configuration of state S1 and subsequently
activating c
1
in the configuration of state S3 leads to
the same configuration, of course. Cycles and DAGs
can be recognized by the VIATRA2 tool, so that the
searches can be effectively pruned for achieving very
strong reductions of the search costs. This makes the
searches much more efficient both in terms of space
and time.
Figure 4: Cycles and DAGs in the search space.
Breadth-first search is implemented directly in
VIATRA2, while for best-first search an evaluation
function has to be defined. Since we implemented
A*, this evaluation function is f (n) = g(n) + h(n) as
reviewed above. Note, that using f (n) = g(n) leads to
an alternative implementation of breadth-first search,
since there are unit costs for all transformations. A*
with a heuristic h usually searches more efficiently
than breadth-first search.
For A*, admissibility of the heuristic function is
important for guaranteeing the optimality of solutions
found. For evaluating a configuration in such a func-
tion with respect to its goal achievement, the number
of not (yet) fulfilled conjunctively related goal condi-
tions is counted. In case of disjunctively related con-
ditions, the minimum is taken. The resulting number
can be used as the heuristic value, since each condi-
tion needs at least one application of a transformation
rule. In fact, these can only be activation rules. De-
activation rules may additionally be necessary, in or-
der to deactivate some connection so that another one
needed can be activated at this particular pin. Con-
sequently, this number is less than or equal to the
number of minimal steps to achieve the goal condi-
tion, i.e., this is an admissible heuristic. This can also
be explained more theoretically based on the meta-
heuristic of problem relaxation, see (Pearl, 1984). A
relaxed problem would only need activation rules for
its solution, i.e., the number calculated by our heuris-
tic function.
5 EXPERIMENT
First, we present our design of the experiment, and
then its results.
ENASE 2019 - 14th International Conference on Evaluation of Novel Approaches to Software Engineering
294
5.1 Experiment Design
The purpose of this experimental evaluation is purely
exploratory, answering the question of feasibility of
this approach under realistic conditions such as those
in industrial practice, more precisely for reusing HSI
designs of automotive ECUs. Hence, we had to make
sure in the experiment design that the given HSI de-
signs and the requirements for new ones are realistic.
Since statistical fluctuation was to be expected for
different instances, we defined several ones and in-
cluded some randomness into their creation. In ad-
dition, we wanted to systematically get data on the
average running times for different (optimal) solution
lengths, in order to evaluate the effect of scaling with
increasing problem difficulty.
First, we defined a specific ECU hardware based
on typical hardware components available on the PCB
of an ECU in our domain. For the microcontroller,
we defined a resource set inspired by a typical 64-pin
ARM microcontroller (STM, 2018; Infinion, 2018).
For creating differently configured ECUs, ECU-pins
of this first ECU were selected and requirements ran-
domly assigned to them. For each of them, a solu-
tion was determined (through searches) and stored as
a base model for the next step of model creation.
Then we created problem instances with differ-
ent solution lengths by generating requirements ran-
domly (again). This resulted in 75 problem instances
for each solution length (up to 20 steps), with dif-
ferent starting configurations and different target re-
quirements. From this set, ten problem instances each
were selected randomly and used for the searches in
the experiment. Since we experienced some variation
in the runs of VIATRA2 also regarding the ordering
during design space exploration, which influences the
running time depending on when a solution is found,
we ran each problem instance five times and calcu-
lated mean values.
We executed the experiment runs on a standard
Windows laptop computer with an Intel Core i7-
8750H Processor (9MB Cache, up to 4.1 GHz, 6
Cores). It has a DDR4-2666MHz memory of 32GB.
The disk does not matter, since all the experimental
data were gathered using the internal memory only.
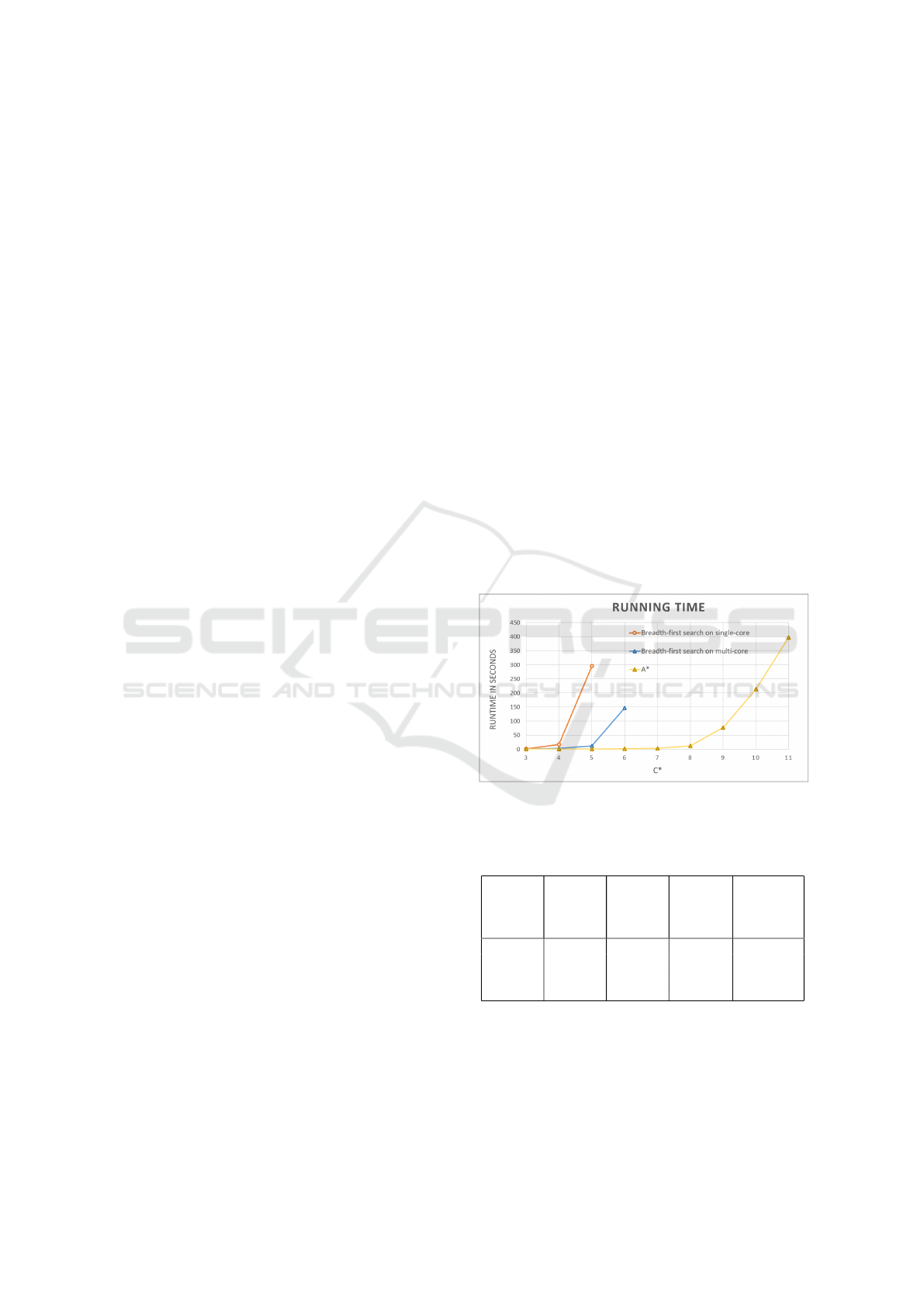
5.2 Results
On the laptop computer used, we were able to collect
the results of searches with optimal solution lengths
(costs) C* of up to six for breadth-first search and of
up to 17 for A*. All the searches found optimal so-
lutions and guaranteed that they are optimal (in terms
of solution length). Figure 5 plots the mean running
times for both kinds of search in seconds (where no
other processes were running on the laptop computer
used). In fact, breadth-first search shows up in two
plots, one for running on six cores in parallel and one
on a single core. A* was running on a single core
(only), since VIATRA2 does not support parallel ex-
ecution of searches with cost functions.
In more detail, Table 1 shows the data gathered
from the multi-core runs, including the mean num-
bers of states visited. Table 2 shows the data of the
breadth-first searches on a single core, and Table 3 the
detailed results of the A* searches (on a single core).
The number of states visited per second shows mi-
nor fluctuations (presumably due to technical reasons
inside the VIATRA2 engine), but there is no system-
atic deviation due to the running time or the search
depth. The factors of running times (or the numbers of
nodes visited) from level i to i + 1 of C* are an order
of magnitude less than the average branching degree
for breadth-first search, and two orders less for A*.
The reasons are the DAGs in the search space, which
can be exploited even much more by best-first search,
since it is directed to a goal state and can search much
deeper.
Figure 5: Comparison of running times of breadth-first
search vs. A*.
Table 1: Summarized results of breadth-first search exe-
cuted on six cores.
C* Running
time
Running
time
factor
No. of
visited
states
No. of
states
per
second
3 0.30 – 1,160 3,890
4 2.73 9.17 12,680 4,640
5 11.54 4.22 32,287 2,800
6 146.89 12.73 301,830 2,050
It is easy to see in Figure 5 that A* is much more
efficient than breadth-first search in terms of running
time, even when running on a single core as com-
pared to six cores. Breadth-first search running on
six cores can just find optimal solutions with a max-
imum length of six, while A* (running on a single
An Experimental Evaluation of Design Space Exploration of Hardware/Software Interfaces
295

Table 2: Summarized results of breadth-first search exe-
cuted on a single core.
C* Running
time
Running
time
factor
No. of
visited
states
No. of
states
per
second
3 0.95 – 1,327 1,399
4 16.98 17.91 14,739 868
5 295.29 17.39 214,624 727
Table 3: Summarized results for A*.
C* Running
time
Running
time
factor
No. of
visited
states
No. of
states
per
second
3 0.11 – 133 1,262
4 0.13 1.28 289 2,144
5 0.53 3.96 1,075 2,016
6 1.20 2.26 2,677 2,225
7 3.04 2.52 6,690 2,204
8 12.15 4.00 21,848 1,799
9 76.91 6.33 106,518 1,385
10 213.65 2.78 328,704 1,539
11 396.91 1.86 604,839 1,524
core) can do so nearly twice as deep. Hence, the ad-
missible heuristic serves well its purpose of making
its searches much more directed and, hence, efficient
than breadth-first search without any heuristic.
6 CONCLUSION AND FUTURE
WORK
The question is now, whether these search results in-
dicate the feasibility of this approach for reusing re-
alistic HSI designs. We think that breadth-first search
does not qualify due to the shallow searches it was
able to perform. It will most likely be insufficient in
practice to find optimal solutions of, say, six adapta-
tion steps. However, A* can search much deeper, and
this makes it feasible for such reuse. This shows the
importance of the heuristic knowledge involved.
Of course, the actual applicability for real-world
problems will yet have to be shown in a case study.
Actually, we also plan to address the problem of auto-
matically finding a previous HSI that is similar to the
new one for which the requirements are given. This
may lead to case-based reasoning where both finding
a similar previous case and the adaptation of its stored
(previous) solution to the new one is automated.
ACKNOWLEDGEMENTS
The InteReUse project (No. 855399) is funded by
the Austrian Federal Ministry of Transport, Innova-
tion and Technology (BMVIT) under the program
“ICT of the Future” between September 2016 and
August 2019. More information can be found at
https://iktderzukunft.at/en/.
REFERENCES
Bergmann, G., D
´
avid, I., Heged
¨
us,
´
A., Horv
´
ath,
´
A., R
´
ath, I.,
Ujhelyi, Z., and Varr
´
o, D. (2015). Viatra 3: A reactive
model transformation platform. In Kolovos, D. and
Wimmer, M., editors, Theory and Practice of Model
Transformations, pages 101–110, Cham. Springer In-
ternational Publishing.
Dechter, R. and Pearl, J. (1985). Generalized best-
first strategies and the optimality of A
∗
. J. ACM,
32(3):505–536.
Dijkstra, E. (1959). A note on two problems in connexion
with graphs. In Numerische Mathematik 1, pages 269–
271.
Eclipse (2017). Package org.eclipse.emf.ecore (emf
javadoc).
Harman, M. and Jones, B. F. (2001). Search-based software
engineering. Information and Software Technology,
43(14):833 – 839.
Hart, P., Nilsson, N., and Raphael, B. (1968). A formal
basis for the heuristic determination of minimum cost
paths. IEEE Transactions on Systems Science and Cy-
bernetics (SSC), SSC-4(2):100–107.
Hegedus, A., Horvath, A., Rath, I., and Varro, D. (2011). A
model-driven framework for guided design space ex-
ploration. In Proceedings of the 2011 26th IEEE/ACM
International Conference on Automated Software En-
gineering, ASE ’11, pages 173–182, Washington, DC,
USA. IEEE Computer Society.
Infinion (2018). STM32 32-bit Arm Cortex product family.
Pearl, J. (1984). Heuristics: Intelligent Search Strate-
gies for Computer Problem Solving. Addison-Wesley,
Reading, MA.
Steinberg, D., Budinsky, F., Paternostro, M., and Merks,
E. (2009). EMF: Eclipse Modeling Framework 2.0.
Addison-Wesley Professional, 2nd edition.
STM (2018). Infineon AURIX
TM
Family TC29xT.
ENASE 2019 - 14th International Conference on Evaluation of Novel Approaches to Software Engineering
296
