
Conditional Privacy: Users’ Perception of Data Privacy in Autonomous
Driving
Teresa Brell, Hannah Biermann, Ralf Philipsen and Martina Ziefle
Human-Computer Interaction Center, RWTH Aachen University, Campus-Boulevard 57, 52074 Aachen Germany
Keywords:
Mobility Acceptance, Autonomous Driving, Privacy, User Diversity, Data Security.
Abstract:
Connected autonomous driving can be a key for safety enhancement in road traffic and long-term reduction
of driver-induced accidents with personal injury. Though, its acceptance is challenging, because of perceived
restrictions on data security and privacy concerns. Hence, in this study, the focus was on users’ perception
of data privacy in autonomous and connected driving. For this purpose, a two-tiered research approach was
conducted, based on semi-structured interviews (N=7) and an online questionnaire (N=100). Special attention
was given to data storage and processing, data distribution, as well as personal usage purposes as predictors
for the use intention. Results showed that the driver was most likely accepted as data decision maker, whereas
the own car was preferred as data receiver. Besides, evaluation profiles indicated user diverse attitudes con-
cerning the willingness to use autonomous driving regularly. These study outcomes contribute to a deeper
understanding of user requirements in the context of mobility acceptance.
1 INTRODUCTION
Due to increasing traffic on the streets today, with the
human as accident reason number one, road safety
poses a global challenge. Regarding Germany, for
example, 3,180 people were killed in road traffic ac-
cidents in 2017, which is about nine people a day
(Destatis, 2018b). Although the total number of casu-
alties dropped to its lowest level in more than 60 years
(Destatis, 2018d), there is still a need for progress
in road safety, in particular, to prevent driver-related
causes of accidents, like insufficient distant, inappro-
priate speed, and improper road use (Destatis, 2018c).
To this, smart mobility systems and technologies,
such as in autonomous driving, have the potential
to reduce traffic accidents and improve road safety
in the long-term (Bishop, 2000; Farmer, 2004; Liu
et al., 2008). Automated vehicle systems, for in-
stance, adaptive cruise control (Vahidi and Eskandar-
ian, 2003) and autonomous brake assist (Breuer et al.,
2007; Kusano and Gabler, 2012), support drivers in
their responsibility under certain driving conditions
to provide a high level of safety in specific traffic sit-
uations. Concerning the automation and intelligent
connection of transportation systems and road traffic,
Vehicle2X-technologies offer innovative communica-
tion possibilities for data sharing and interaction be-
tween vehicles and their environment (e.g., other ve-
hicles, transport infrastructure, and pedestrians) (Pi-
cone et al., 2015). To increase overall road safety, spe-
cial attention is given to the technical development,
e.g., sensor models (Eichberger et al., 2017), data pro-
cessing (Scherping et al., 2013), and traffic manage-
ment as well as efficiency (Wedel et al., 2009) in this
context.
With regard to the users’ perspective on au-
tonomous driving, previous research revealed that
users are aware of the advantages of automated driv-
ing, but also, that perceived barriers, e.g., the fear
of hacker attacks, limit its acceptance (K
¨
onig and
Neumayr, 2017). Hence, research focus was on,
for instance, predictors for trust (Haeuslschmid and
Buelow, 2017), safety perceptions (Schmidt et al.,
2016b), driverless car ethics (Bonnefon et al., 2016),
and, in particular, user diverse privacy and data se-
curity requirements (Schmidt et al., 2016c). To this,
different approaches were applied, such as qualita-
tive and quantitative methods (Schmidt et al., 2016a)
as well as experimental study designs (Waytz et al.,
2014). Key findings indicate a general distrust when
it comes to transfer data, provided that the willingness
to share personal data with an intelligent transport
system is particularly low. Against the background
of fast-developing technologies, further research is
needed to clarify why and to what extent users ac-
cept or reject data processing and storage as well as
352
Brell, T., Biermann, H., Philipsen, R. and Ziefle, M.
Conditional Privacy: Users’ Perception of Data Privacy in Autonomous Driving.
DOI: 10.5220/0007693803520359
In Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2019), pages 352-359
ISBN: 978-989-758-374-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Table 1: Statements about data storage and data processing.
General evaluation:
Do you agree with the following statements?
Personal data recorded by the car should be identified with my person.
Each driver should have an ID chip to log & in the vehicle and store personal data.
I want to know where my personal data is & stored and processed.
I want to know how long my data will be stored.
I want to be able to delete the history or & individual entries of the recorded data individually.
I want to know who stores and processes my & personal data.
I want to decide for myself which personal & data I want to release.
I want to know which of my data is stored & processed.
its distribution in autonomous driving.
The aim of this study was to explore users’ per-
ception of data privacy in autonomous and connected
driving.
For this purpose, a two-tiered research approach
was chosen including preceding interviews (N=7) and
a subsequent online questionnaire study (N=100).
The identification of influential acceptance factors for
autonomous driving is an essential step towards a
user-centered technology development. Not only ma-
jor acceptance-relevant factors like perceived bene-
fits and barriers of the technology itself, but rather a
deep dive into an understanding of users’ privacy and
data security appraisals is necessary at this stage of
the mobility shift. In particular, we focused on user
diverse evaluation patterns, for instance, concerning
questions about the data receiver (Who can access the
data?), decision maker (Who can decide on the data
distribution?) and personal usage purposes as contri-
bution to deeper insights into mobility acceptance.
2 METHOD
With a two-tiered research approach, we addressed
the questions of data security and privacy perception
in autonomous driving via a preceding interview
study. Including these first findings about users’
perception of data distribution and handling, a
questionnaire was developed to validate the results.
As can be seen in Figure 1, the usage intention was
assessed to form evaluation groups. All evaluation
differences on privacy in autonomous driving will
be laid out, focusing on data storage and processing,
data distribution and purpose of use.
Data Acquisition and Analysis. The following em-
pirical work was designed as an online questionnaire.
The participants were acquired in the university envi-
ronment or in thematic forums. The quality of the re-
sponses was checked with regard to processing time
and contradictory response behavior. The resulting
data were analyzed by descriptive analysis and, with
respect to the effects of user diversity. The level of
significance was set to α = .05.
2.1 The Survey
The survey was divided into three main parts.
Demographics. The demographic data was ad-
dressed in the first section. Further, information
about monthly income, possession of driving licence,
and vehicle owner status was questioned. Also, the
willingness to use technology (Neyer et al., 2016)
and the need for control was measured.
Mobility and Digital Profile. In the second section
the participants had to evaluate their mobility and
digital profile. Here, the previous experience with
driver assistance systems (brake assistant, lane
assistant, automatic parking, distance control and
cruise control) as well as usage-patterns and attitudes
toward smartphone applications were questioned.
Concerning the prior experience with driver as-
sistance systems, we focused on advanced speed
regulation systems (adaptive cruise control (ACC))
with automation level 2 (SAE, 2016), as this is the
system with the highest automation level that is
currently available.
Data Security and Privacy Evaluation. The last
section addressed an overall evaluation of data se-
curity and the users’ perception of privacy in an au-
tonomous driving context. Here, several sets of items
(6-point Likert scale, 5=full agreement) questioned
data storage and processing (see Table 1), the distri-
bution of data and different reasons to share data.
Conditional Privacy: Users’ Perception of Data Privacy in Autonomous Driving
353

Participants (N = 100)
Purpose of use
Data
distribution
Data storage
and
processing
Evaluation groups:
usage intention
Privacy in
autonomous
driving
Figure 1: Methodological concept of research model.
2.2 Sample
A total of 134 people participated in the questionnaire
study, of which 34 were excluded from statistical
analyses because of incomplete data sets. Hence, the
sample consisted of N=100 participants, divided into
36 women and 64 men. The participants’ age ranged
from 19 to 68 years, with an average of 34.5 years
(SD=12.5). With 59% holding a university degree
(n=59), the sample was of above average education
(Destatis, 2018a). Besides, 22% had an university en-
trance qualification (n=22), followed by 11% with a
vocational baccalaureate diploma (n=11), 7% with a
secondary school diploma (n=7), and 1% with a pri-
mary or secondary school leaving certificate (n=1).
The majority’s (62%) monthly net household income
was below 3000 Euro (n=62).
Most of the participants (96%) hold a driving
licence (n=96) and owned a motor vehicle (69%,
n=69). In general, the experience with driver assis-
tance systems was rather low (M=2.42, SD=0.70).
In detail, navigation systems were commonly used
(M=4.53, SD=0.80), next to cruise control (CC)
(M=3.67, SD=1.20), whereas parking assistant
(M=2.85, SD=1.11), adaptive cruise control (ACC)
(M=2.49, SD=0.98), and lane keeping assistant
(M=2.40, SD=0.85) were only little used and known,
just as assistants for traffic signs (M=2.20, SD=1.01),
emergency brake (M=2.18, SD=0.82), and lane
change (M=2.16, SD=0.93). Besides, the willingness
to use technology was rather positive (M=3.54,
SD=0.73), whereas the need for control was more
average (M=2.74, SD=0.59).
User Group Allocation. In order to classify the
groups, the willingness to use autonomous vehicles
regularly in the future was surveyed as part of an item
set. According to the participants’ intention to use
a connected autonomous vehicles, two groups were
formed, comprising potential users (n=37), who were
more likely to agree autonomous driving in future
(M=4.62, SD=0.49) and non-users (n=63), who rather
rejected autonomous driving (M=2.16, SD=0.95).
Descriptive profiles of specific user group character-
istics are presented in Table 2.
3 RESULTS
In the following section the obtained results will be
presented in detail. First, an overview of the evalua-
tion based on the complete sample, the results on data
storage and processing, data distribution and purpose
of use will be introduced extensively. Following each
evaluation, the group-specific differences will be laid
out.
3.1 Data Storage and Processing
Overall, the results show that obtaining information
about data storage and processing is favored. The
highest approval rates could be found in statements
on receiving information about the data type, which
is stored (M=4.33/5 points max., SD= 0.87), the pos-
sibility to decide for oneself, which personal data is
released (M=4.32, SD=0.88) and receiving informa-
tion about who stores and processes the data (M=4.31,
SD=0.91). In addition, it was agreed on the possi-
bility to delete the history or individual entries of the
recorded data (M=4.25, SD=1.07), receiving informa-
tion about how long (M=4.04, SD=0.99) and where
data will be stored and processed (M=3.68, SD=1.23).
The strongest disagreement was found regarding a
possible ID chip, which is used to log on to the vehi-
cle containing personal data (M=2.07,SD=1.55) and
the identification of a person via the personal data
recorded by the vehicle (M=1.72, SD=1.36).
User Groups. Addressing the data storage and pro-
cessing, group differences showed up. To be pre-
cise, the non-user group (M= 3.87, SD=1.13) evalu-
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
354

Table 2: Characteristics of user groups.
User Groups User (n=37) Non-user (n=63)
Age M=29.51, SD=10.17 M=37.49, SD=12.92
Male 83.8% (n=31) 52.4% (n=33)
Female 16.2% (n=6) 47.6% (n=30)
Net household income <3000 Euro 70.2% (n=26) 57.1% (n=36)
Driving licence holders 64.9% (n=24) 71.4% (n=45)
Willingness to use technology in general M=3.95, SD=0.53 M=3.30, SD=0.73
Perceived need for control M=2.63, SD=0.44 M=2.80, SD=0.66
Prior experience with driver assistance systems M=2.65, SD=0.80 M=2.28, SD=0.60
ated the possibility to know where the data is stored
significantly higher (F(1,98)=4,34), p<.05) than the
user group (M=3.35, SD=1.34). Also, the information
about who stores the data showed a similar outcome:
the non-user group (M=4.46,SD=0.67) urged that
information significantly stronger (F(1,98)=4,86),
p<.05) than the user group (M=4.05, SD=1.18).
3.2 Data Distribution: Data Receiver
and Decision Maker
With regard to data distribution, two thematic cate-
gories were measured: First, the question of who is
entitled to have the recorded data was addressed (see
Figure 2) and second, who should decide who may
use the data by the connected autonomous vehicle.
3.2.1 Data Receiver
The strongest consent of all the possible receivers
were found for the own car (M=3.52, SD=1.43) fol-
lowed by the police and emergency services (M=3.43,
SD=1.38), and by an addition of the infrastructure
(M=3.02, SD=1.50). In contrast, the vehicle manu-
facturer (M=1.17, SD=1.17) and the insurance com-
pany (M=1.50, SD=1.37) matched the least average
agreement rates.
User Groups. Concerning the user groups, almost all
statements according the data distribution were per-
ceived significantly different (see Figure 2). On av-
erage, potential users show a stronger agreement to
most of the given possible data receivers.
3.2.2 Decision Maker
Addressing the responsibility to decide who uses the
data, the driver reached the highest average approval
with 4.33 out of 5 points (SD=1.03) followed by the
vehicle owner (M=3.46, SD=1.59). The vehicle man-
ufacturer however has received the strongest rejec-
tion as a decision-maker with an average agreement
of 0.79 (SD=0.97).
User Groups. Again, the groups revealed to signifi-
cantly impact the evaluations. While users had a small
tendency towards neutral agreement about the manu-
facturer as decision maker (M=1.05, SD=1.05), non-
users tend to disagree strongly (M=0.63, SD=0.89)
(F(1,98)=4,53, p<.05). Further, a similar difference
can be found in the agreement of the legislator as de-
cision maker. Here, the willingness to use the tech-
nology had a significant effect (F(1,98)=6,83, p=.01).
On average, the users agreed more on the legislator
as decision-maker (M=2.70, SD=1.76) than non-users
(M=1.84, SD=1.48).
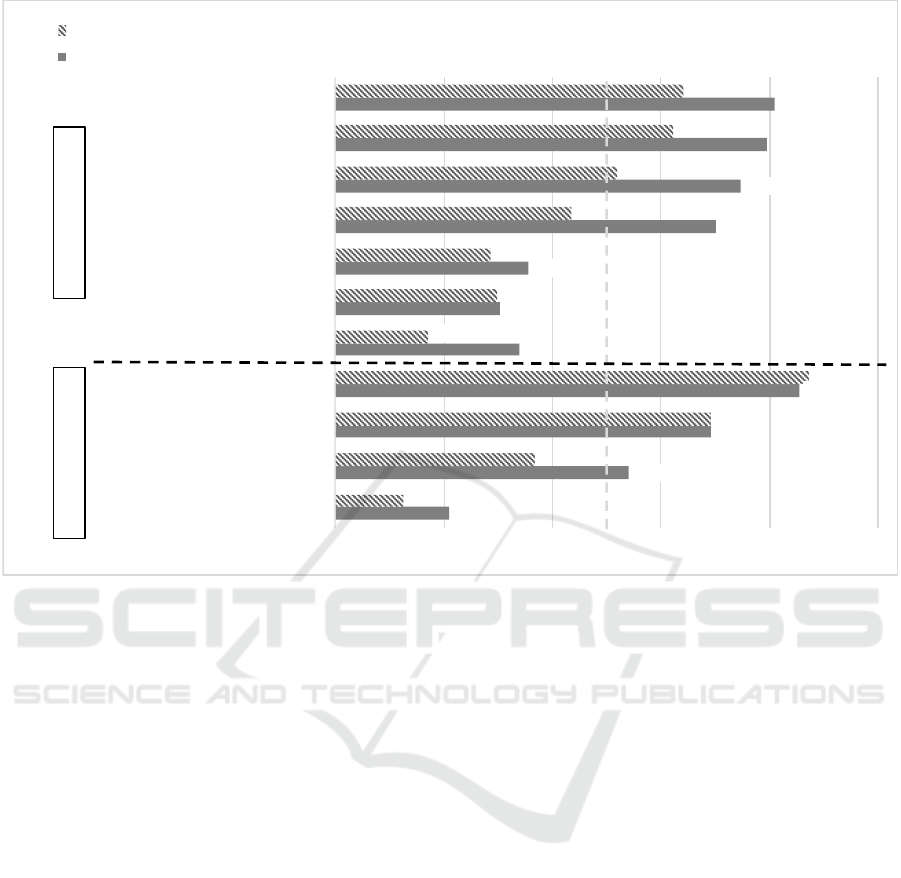
3.3 Purpose of Use
The sample has agreed on average to all possible rea-
sons to share data (see Figure 3). Here, safety for
oneself and other traffic participants was of highest
interest: to report own accidents to police and rescue
services (M=4.07, SD=1.02) and for accident clari-
fication (M=3.88, SD=1.03). Thematically, comfort
issues followed the safety-related reasons to use data:
the data may be used for personal benefits (e.g. traffic
information or reservation of parking spots) and for
the improvement of street and traffic flow. Hence, to
enable the police to immobilize the vehicle in case of
emergency received the least approval with an aver-
age of 3.06 (SD=1.61).
User Groups. Here, the intention to use the con-
nected and autonomous technology showed an impact
on the evaluations of the purposes of use. All re-
sults were significantly different, except the reasons
inspection of vehicles and to immobilize the vehicle.
In all cases the group with potential users had higher
agreement rates.
Conditional Privacy: Users’ Perception of Data Privacy in Autonomous Driving
355
1,05
2,70
3,46
4,27
1,70
1,51
1,78
3,51
3,73
3,97
4,05
0,63
1,84
3,46
4,37
0,86
1,49
1,43
2,17
2,60
3,11
3,21
0,00 1,00 2,00 3,00 4,00 5,00
Vehicle Manufacturer *
Legisl ator *
Vehicle owner
Dri ver
Vehicle manufacturer *
Insurance company
Service provider of rental vehicles
The own car and cars nearby *
The own car and the infrastructure *
Poli ce and em ergenc y services *
The own car *
Data distribution: Decision maker and data receiver
Non-user
User
Decision maker
Data receiver
Figure 2: Overall results of data distribution: who decides who may receive the data (decision maker) and who may access
the data (data receiver). 0=full disagreement, 5=full agreement. * indicates significant group differences.
4 DISCUSSION
The present study aimed at an understanding of users’
perceptions towards data privacy in autonomous and
connected driving. Methodologically, we focused in
a first investigation on understanding general insights
of possible technology user about autonomous driv-
ing, in particular their fears and doubts according data
security (interview study). In a second step, we as-
sessed the desire for information on data processing,
storage, and distribution in a western European sam-
ple (survey study). Additionally, we analyzed evalua-
tions of user groups with respect to their willingness
to use the technology in future. The discussion will
mirror the result structure and will furthermore ques-
tion the empirical procedure as well as needed future
research topics.
Concerning data storage and processing, the
most valued information was which type of data is
shared (e.g. own position, speed) – for both user
groups. This result goes in line with the research find-
ings of Schmidt et al. (2016a). Further, it was shown
that there are different types of data, which are shared
more willingly than others (the more personal data
the data is, the less willing users are to share them).
A closer look into the user groups showed, that non-
users would like to know the data type with a signifi-
cantly higher consent.
The wish to maintain these information shows also
a possible distrust to the system, not necessarily a dis-
like or distrust for the technological idea. Hence, only
less than half of the sample agreed to use the technol-
ogy in future. Given the fact that the technology was
only described and could not be tested, the number of
potential users was rather high.
A closer look onto the groups shows, that the user
group in this study is mainly male and rather young,
given the fact that the ”early adopters” of mobility
technology (e.g. electromobility) are about 51 years
of age (Trommer et al., 2015). Whereas the non-user
group is almost symmetrical in gender distribution.
In fact, this is particularly noteworthy since the en-
tire sample had a high male proportion and therefore
women may be more likely to be theoretical non-users
(at least in this study). The group of users has a
higher willingness to use technology in general and
they have also more experience with driver assistance
systems. Interestingly, their average value for per-
ceived need for control was lower compared to the
non-user group.
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
356

3,43
3,41
4,32
4,27
4,41
4,59
2,84
3,24
3,25
3,37
3,57
3,76
0 1 2 3 4 5
By the police to immobilize the vehicle in the case of emergency.
For the inspection of vehicles used for business purposes.
To improve roads and traffic f low. *
My personal bene fit (e.g. traffic information). *
For accident clarification. *
To report own accidents or emergencies to police and res cue services . *
Purpose of data usage
Non-user
User
Figure 3: Overview of the agreement to the use of the recorded data. 0=full disagreement, 5=full agreement. * indicates
significant group differences.
The group of users is almost neutral to need for
control, which might mirror the lower evaluation rates
on information about data storage and processing.
Now concerning the data distribution, the group
of users has significantly higher rates on all possible
data receivers, almost showing a disinterest in who
receives the data at all. And further, they also have
rather high average agreement rates on who decides
about the data distribution.
Interestingly, no group is overall agreeing to the vehi-
cle manufacturer as data receiver or distributor. This
is an astonishing result, given the fact that the manu-
facturer is right now the main receiver of all vehicle-
related data. Here, a potential distrust to authorities
can be identified, given the recent negative events and
press about the liability on car manufacturers, e.g.
VW Diesel scandal (Jung and “Alison” Park, 2017;
Sharpe, 2017). However, one has to consider the
western European sample. A comparison study in
other European regions would definitely reveal pos-
sible cultural differences regarding the trust given to
authorities in a mobility context. Trust also seems
to be a main influencing factor in data privacy of au-
tonomous vehicles. Hence, the survey did not ques-
tion trust as user factor, the result that the own car has
the highest approval values as data receiver and the
driver him- or herself as decision maker for the data
distribution shows a clear and needed focus on that
topic in future work.
An average agreement on all purposes of use was
identified. Safety is, however, still the most promi-
nent purpose. This result validates several studies on
benefits of autonomous driving (Brell et al., 2018).
The group of users agreed significantly higher on all
given purposes. Here, possibly a better understand-
ing of the technology’s benefits may be uncovered.
This could be connected to the groups overall higher
use of technology altogether. Also, personal benefits
like traffic information or the improvement of road
and traffic flow had very high acceptance rates – here,
the general understanding of potential possibilities to
enhance and develop traffic can be identified. How-
ever, further purposes of use need to be discussed.
The general wish to improve the current situation does
not automatically improve the acceptance or usage of
a technology or infrastructure change.
5 CONCLUSION AND
LIMITATIONS
Autonomous driving and connected vehicles in Ger-
many are perceived as useful and although without
practical experience, the western European sample
showed interest in the topic and communicated a will-
ingness to use the technology in future. Although data
protection is a very critical issue and needs to be fur-
ther explored in order to ensure up-front acceptance
of the technology and a possibility to participate in its
development, a group of users could be identified who
agree to use the technology without practical experi-
ence. Therefore, data privacy is a highly important
topic as well as the distrust or trust of data receivers,
which showed that these topics are not handled well
up until today. Clearly, the benefits must be commu-
nicated more transparent in order to pick up the more
skeptical people. We found a high approval on po-
lice and emergency services as data receiver, but still
not the highest agreement on using it actively. To en-
able the police to immobilize the vehicle in case of an
emergency was an agreed upon reason, but still over-
all not the highest approval rates. The findings call
Conditional Privacy: Users’ Perception of Data Privacy in Autonomous Driving
357

for action to help transform the conditional perceived
privacy into a fully perceived one.
ACKNOWLEDGEMENTS
This work has been funded by the Federal Ministry of
Transport and Digital Infrastructure (BMVI) within
the funding guideline ”Automated and Connected
Driving” under the grant number 16AVF2134B.
Many thanks go to Adam Michalik for research assis-
tance and the participants for sharing their opinions
on this matter. Also we like to thank the reviewer for
their feedback on this work.
REFERENCES
Bishop, R. (2000). Intelligent vehicle applications world-
wide. IEEE Intelligent Systems and Their Applica-
tions, 15(1):78–81.
Bonnefon, J.-F., Shariff, A., and Rahwan, I. (2016). The
Social dilemma of autonomous vehicles. Science,
352(6293):1573–1576.
Brell, T., Philipsen, R., and Ziefle, M. (2018). scary! risk
perceptions in autonomous driving: the influence of
experience on perceived benefits and barriers. Risk
analysis.
Breuer, J. J., Faulhaber, A., Frank, P., and Gleissner, S.
(2007). Real World Safety Benefits of Brake Assis-
tance Systems. In 20th International Technical Con-
ference on the Enhanced Safety of Vehicles (ESV).
Destatis (2018a). 17% of the population with academic de-
gree. https://www.destatis.de/EN/FactsFigures/
SocietyState/EducationResearchCulture/
EducationalLevel/AcademicDegree.html.
Destatis (2018b). Accidents and casualties cov-
ered. https://www.destatis.de/EN/FactsFigures/
EconomicSectors/TransportTraffic/TrafficAccidents/
Tables /RoadTrafficAccidents.html.
Destatis (2018c). Causes of accidents. https://www.
destatis.de/EN/FactsFigures/EconomicSectors/
TransportTraffic/TrafficAccidents/Tables/
DriverMistakes.html.
Destatis (2018d). Unfallentwicklung auf deutschen
Straßen [Accident development on German roads].
https://www.destatis.de/DE/PresseService/Presse/
Pressekonferenzen/2018/verkehrsunfaelle 2017/
Pressebroschuere unfallentwicklung.pdf? blob=
publicationFile.
Eichberger, A., Markovic, G., Magosi, Z., Rogic, B., Lex,
C., and Samiee, S. (2017). A Car2X sensor model for
virtual development of automated driving. Interna-
tional Journal of Advanced Robotic Systems, 14(5):1–
11.
Farmer, C. M. (2004). Effect of electronic stability control
on automobile crash risk. Traffic Injury Prevention,
5(4):317–325.
Haeuslschmid, R. and Buelow, M. V. (2017). Supporting
Trust in Autonomous Driving. In IUI 2017, pages
319–329.
Jung, J. C. and “Alison” Park, S. B. (2017). Case study:
Volkswagen’s diesel emissions scandal. Thunderbird
International Business Review, 59(1):127–137.
K
¨
onig, M. and Neumayr, L. (2017). Users’ resistance to-
wards radical innovations: The case of the self-driving
car. Transportation Research Part F, 44:42–52.
Kusano, K. D. and Gabler, H. C. (2012). Safety bene-
fits of forward collision warning, brake assist, and
autonomous braking systems in rear-end collisions.
IEEE Transactions on Intelligent Transportation Sys-
tems, 13(4):1546–1555.
Liu, J. F., Su, Y. F., Ko, M. K., and Yu, P. N. (2008).
Development of a vision-based driver assistance sys-
tem with lane departure warning and forward colli-
sion warning functions. In Techniques and Applica-
tions, 2008. DICTA’08. Digital Image, pages 480–
485. IEEE.
Neyer, F., Felber, J., and Gebhardt, C. (2016). Kurzskala
zur erfassung von technikbereitschaft (technology
commitment). In Zusammenstellung sozialwis-
senschaftlicher Items und Skalen.
Picone, M., Busanelli, S., Amoretti, M., Zanichelli, F., and
Ferrari, G. (2015). Advanced Technologies for Intel-
ligent Transportation Systems. Springer International
Publishing AG.
SAE (2016). Surface vehicle recommended practice - tax-
onomy and definitions for terms related to driving au-
tomation systems for on-road motor vehicles. J3016.
Scherping, R., St
¨
ahlin, U., and Bertram, T. (2013). Vehi-
cle2x data preprocessing for safety functions. In 5th
International Symposium on Wireless Vehicular Com-
munications (WiVeC). IEEE.
Schmidt, T., Philipsen, R., Themann, P., and Ziefle, M.
(2016a). Public perception of V2X-technology - Eval-
uation of general advantages, disadvantages and rea-
sons for data sharing with connected vehicles. In IEEE
Intelligent Vehicles Symposium (IV) Gothenburg, Swe-
den, June 19-22, pages 1344–1349.
Schmidt, T., Philipsen, R., and Ziefle, M. (2016b). Share
to protect. In International Conference on Human
Aspects of Information Security, Privacy, and Trust,
pages 152–163. Springer.
Schmidt, T., Philipsen, R., and Ziefle, M. (2016c). User
Diverse Privacy Requirements for V2X-Technology:
Quantitative Research on Context-Based Privacy As-
pects. In Proceedings of the International Conference
on Vehicle Technology and Intelligent Transport Sys-
tems (VEHITS 2016), pages 60–67.
Sharpe, N. F. (2017). Volkswagen’s bad decisions & harm-
ful emissions: How poor process corrupted codetermi-
nation in germany’s dual board structure. Mich. Bus.
& Entrepreneurial L. Rev., 7:49.
Trommer, S., Jarass, J., and Kolarova, V. (2015). Early
adopters of electric vehicles in germany unveiled.
World Electric Vehicle Journal, 7(4):722–732.
Vahidi, A. and Eskandarian, A. (2003). Research Ad-
vances in Intelligent Collision Avoidance and Adap-
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
358

tive Cruise Control. IEEE Intelligent Transportation
Systems Magazine, 4(3):143–153.
Waytz, A., Heafner, J., and Epley, N. (2014). The mind in
the machine: Anthropomorphism increases trust in an
autonomous vehicle. Journal of Experimental Social
Psychology, 52:113–117.
Wedel, J. W., Sch
¨
unemann, B., and Radusch, I. (2009).
V2X-based traffic congestion recognition and avoid-
ance. In 10th International Symposium on Pervasive
Systems, Algorithms, and Networks, pages 637–641.
IEEE.
Conditional Privacy: Users’ Perception of Data Privacy in Autonomous Driving
359
