
Development of Agent System for Multi-robot Search
Masashi Omiya
1
, Munehiro Takimoto
2
and Yasushi Kambayashi
1
1
Department of Computer and Information Engineering, Nippon Institute of Technology,
4-1 Gakuendai, Miyashiro-machi, Minamisaitama-gun, Saitama 345-8510, Japan
2
Department of Information Sciences, Tokyo University of Science, 2641 Yamazaki, Noda 278-8510, Japan
Keywords: Mobile Agent, Ad-hoc Network, Multi Robot, Particle Swarm Optimization.
Abstract: In this paper, we propose an agent system that controls multiple mobile robots. We describe the agent system
as well as an example multi-robot system as an application of this agent system. The aim of the multi-robot
system is providing efficient searches for a given target. Therefore, it is necessary to mutually communicate
and cooperate among robots. Taking account of the delay of communication, cost, fault tolerance, and
robustness, we have chosen mobile agent system for the information transmission method. We have also
chosen ad-hoc method for the communication mode, where each robot communicates directly without going
through the Internet. Even though agent systems are often implemented using Java language or Python
language, we have chosen C++ language for developing our agent system with the hope for gaining
performance efficiency. We have modularized each function and it does not depend on other modules. We
have shown the feasibility of our multi-agent system by applying the system to a multi-robot system that
implement particle swarm optimization.
1 INTRODUCTION
Recently we are observing scenes where robots play
an active part in places where people can hardly work.
For example, multiple autonomous robots may be
used for search and rescue operations in urban areas
after a disaster. In the previous study, we have shown
that a team of multiple robots search efficiently using
mobile agents (Oda et al., 2018).
A mobile agent is a program that migrates
between devices and performs a given task at an
arbitrary target device (Kambayashi and Takimoto,
2005). The agent platform need to transmit and
receive agents between devices. When
communicating via an access point that controls the
network, the access point allocates IP addresses to
each devices. In the previous study, we have specified
the destination of agent using the assigned IP address
(Oda et al., 2018).
Considering after disaster cases, disconnection
may occur frequently between the access point and
the communication device due to collapse of the
communication infrastructures. Therefore,
communication through the access points becomes
hard to achieve.
On the other hand, in ad-hoc mode which devices
communicate directly, the network can be constructed
dynamically (Nishiyama et al., 2014). Since a mobile
agent is a partially self-sufficient program, it does not
need to keep continuous communication. They can
continue to work with intermittent communication,
since they only require connection when they move
(Kambayashi et al., 2016).
We have three objects in this study; 1) employing
ad-hoc mode for the agent transition method, 2)
developing a new agent system implemented in C++,
and 3) realizing a search using multiple mobile robots.
We have prepared a specific class to determine the
destination of a given agent. As the example
experiment, we have implemented a search
simulation using the particle swarm optimization.
The rest of this paper is organized as follows. The
second section describes the background. The third
section describes the agent system in C++ we have
designed and implemented. The fourth section
demonstrates the applicability of our agent system to
an example multi-robot system. We show the
feasibility of our mobile agent system by discussing
an experiment. Finally, the fifth section concludes our
discussion.
Omiya, M., Takimoto, M. and Kambayashi, Y.
Development of Agent System for Multi-robot Search.
DOI: 10.5220/0007702603150320
In Proceedings of the 11th International Conference on Agents and Artificial Intelligence (ICAART 2019), pages 315-320
ISBN: 978-989-758-350-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
315
2 BACKGROUND
Agent systems have been widely developed in various
languages (Stone and Veloso, 2000; Braun and
Rossak, 2005). AgentSpace is the prominent agent
system (Sato, 1997). AgentSpace was developed in
Java language. In the previous study, we developed a
mobile agent platform in Python language (Oda et al.,
2018). The purpose of selecting C ++ language as a
development language in this paper is to improve the
agent system’s processing speed. We have provided
C++ classes that provide basic functions for
constructing mobile agents. In this agent system, the
users are expected to overwrite functions to construct
their own agents. Since our agent platform only sends
executable programs as files, agents can be written in
arbitrary programming languages such as Java and
Python language.
We have conducted projects that have taken
advantage of multiple mobile agents. These projects
include evacuation route generation (Taga et al.,
2016; Taga et al., 2017; Taga et al., 2018), and rescue
and search operation (Nagata et al., 2013). These two
studies have one commonality, namely, building a
multi-agent system in a distributed environment. As a
result of these studies, we have shown that an
efficient search can be achieved through
communication among multiple mobile agents.
3 AGENT SYSTEM
In this agent system, an agent is transmitted as an
executable file, and local data are transmitted as
separate files. We have designed the system
extensively using polymorphism through the C++
inheritance mechanism. Since it is possible to
override member functions from derived classes, it is
relatively easy to change depending on the purpose.
We confirmed the operation of communication in ad-
hoc mode environment and the communication in
multi-hop between multiple mobile robots are both
possible.
3.1 Configuration
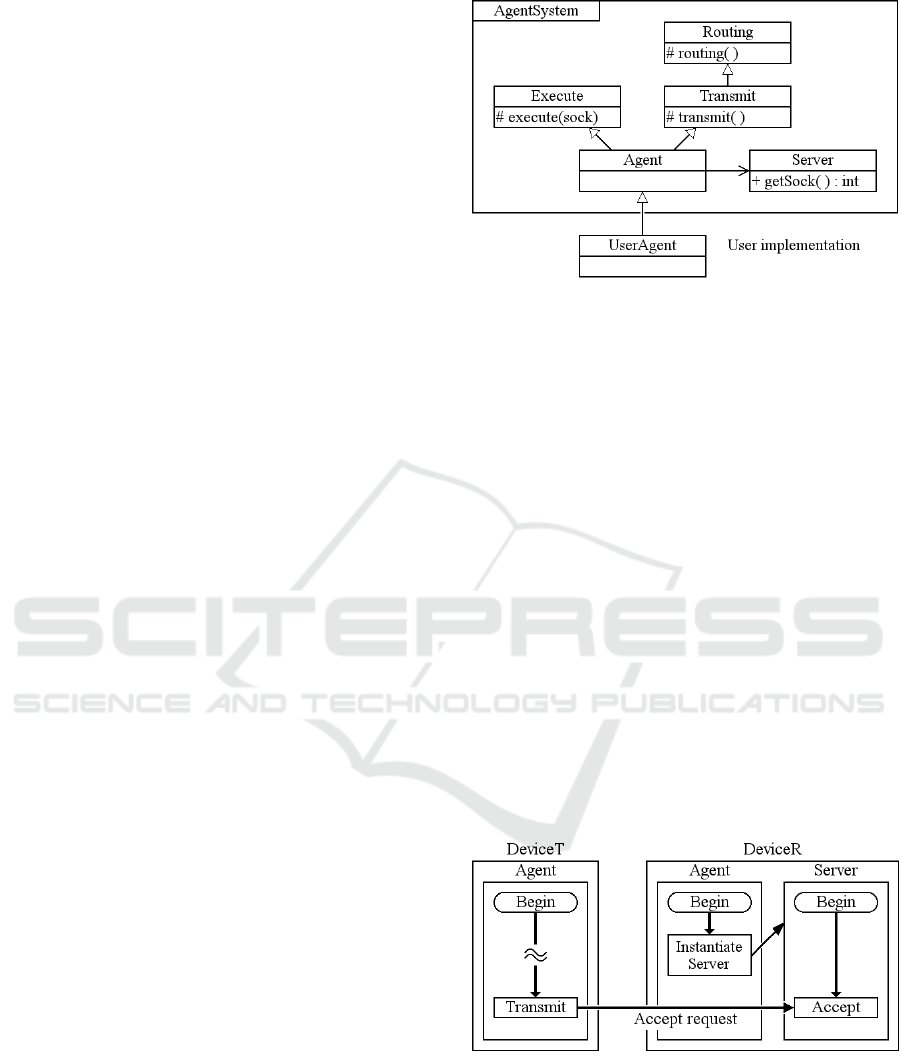
As shown in Figure 1, the agent system consists of
Agent class and Server class.
The Agent class inherits three classes: Execute class,
Transmit class, and Routing class. The users are
expected to implement their own class, i.e. the user
agent as a subclass of the Agent class, and to take
advantages of these classes through multiple inher-
Figure 1: Class relation.
itance. We designed our agent system to implement
only one functionality in each class so that it provides
as much flexibility and simplicity of the code as
possible. The Agent object sends and receives user
agents from another device. The Server object
establishes the connection for transmission of agents.
We explain each class in the following sections.
3.1.1 Server
This class receives the request of agent migration that
is transmitted from other devices, and manages a
socket connection to other devices. The Server object
runs continuously in an independent thread. From
now, we call the Server object, the server.
As shown in Figure 2, the server thread receives
the request of an agent migration that is transmitted
from another device. The Agent object asks the server
in order to establish the socket connection through a
function call. Likewise, a connected socket can be
received through a function as well.
Figure 2: Receive request.
3.1.2 Execute
This class receives agents from other devices using
the communication connection established by the
server and executes them as an independent thread.
When a member function of this class, i.e. execute
HAMT 2019 - Special Session on Human-centric Applications of Multi-agent Technologies
316
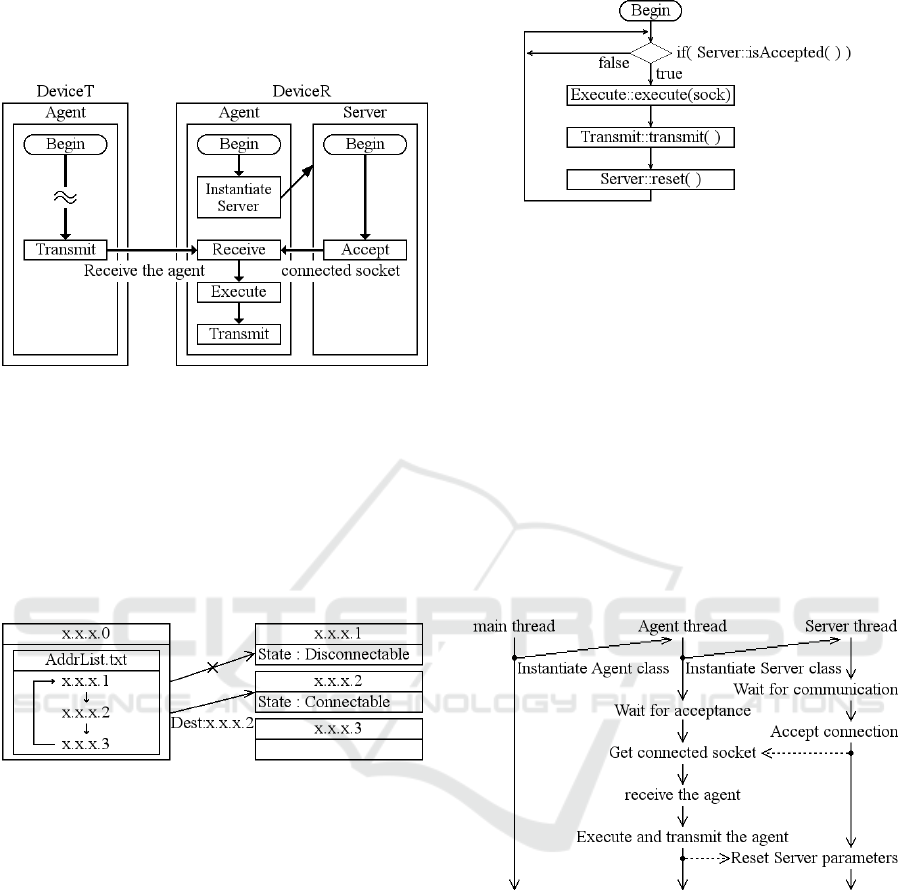
function, is executed, as shown in Figure 3, the server
communicates through the socket connection, and the
received data are saved as files on the local disk.
Figure 3: Receive agent.
3.1.3 Routing
This class determines the destination device of the
agent. By default, as shown in Figure 4, the routing
function attempt to connect in the order of the address
list prepared in advance, and the succeeding address
is taken as the next destination. The user can override
the routing member function in a derived class.
Figure 4: Default routing algorithm.
3.1.4 Transmit
This class transmit agents to other devices. This class
inherits the Routing class. When the transmit function,
which is a member function of this class, is executed,
the inherited routing function is executed to
determine the destination device. And then, the
transmit function communicates with the determined
destination device and transmits the designated agent.
The user can override the transmit function in a
derived class.
3.1.5 Agent
When the Agent class is instantiated and an Agent
thread starts, the Agent thread operates as an
independent thread different from other threads.
Figure 5 shows the flow of an Agent thread. The
Agent thread first instantiates the Server class.
Figure 5: Agent thread flowchart.
Since the server also starts the server thread, as
shown in Figure 6, multiple threads are executed at
the same time. After instantiating the Server class, the
agent thread waits until the server thread receives a
request of an agent migration. When a request of an
agent migration is received, the Agent thread
executes the execute function. The execute function
receives an agent and local data files, if the agent uses
them through a socket connection established by the
server, and then makes the agent running. When the
agent’s processing completes, the Agent thread
executes the transmit function and transmits the agent
to the next destination. After transmitting the agent,
the Agent thread resets the server and waits again
until it receives another request of agent migration.
Figure 6: All running threads.
3.2 User Agents
This agent system executes and moves an agent
prepared in advance in the local directory. The user
prepares a file used as an agent and data files
necessary for the agent’s processing in the local
directory.
When the user constructs a user agent class, he or
she is expected to prepare a class that inherits the
Agent class, such as the MyAgent class, as a program
that uses our agent system. The execute function, the
transmit function, and the routing function can be
overridden from the derived class, if necessary.
Development of Agent System for Multi-robot Search
317
The agent starts processing for the first time after
it is received. The entire process is initiated by
transmitting an agent to the first device using a
program that only transmits the agent.
4 EXAMPLE OF MULTIROBOT
APPLICABILITY
In order to investigate the feasibility of our simple
agent system, we have implemented a set of search
robots using our mobile agent system. The set of our
robots implements the particle swarm optimization
(PSO) for its search for a target. Potential usefulness
of PSO for search robots is demonstrated (Ishiwatari
et al., 2017).
4.1 Particle Swarm Optimization
The particle swarm optimization (PSO) is an
optimization algorithm using swarm intelligence
proposed by Kennedy and Eberhart (1995). PSO is a
method of performing a search using modelled
particle swarm. Each particle has position and
velocity, and adjusts its position and speed from
surrounding particles. Particles converge to a position
considered as a solution. If is the position and is
the velocity, each particle repeats the update of its
own position and speed using the following equation:
(1)
(2)
is the inertial constant.
are the proportion of
particles going to a better position.
are random
numbers. is the local best.
is the global best.
These parameters are stored in data files. We
prepared three files for storing the particle data:
Particle.txt, LocalBest.txt, GlobalBest.txt.
Since robots represent particles of PSO data
present in each particle’s attributes, they are stored in
files bound to each robot. They are Particle.txt and
LocalBest.txt. The data shared among all the particles,
i.e. robots, are stored in a file namely GlobalBest.txt.
These files are bound to each mobile agent. Mobile
agents are trying to make the global data consistent
among the robot by migrating among the robots.
Particle.txt is a file that records the current
coordinates and speed of the robot as particle data.
Each robot holds its own file.
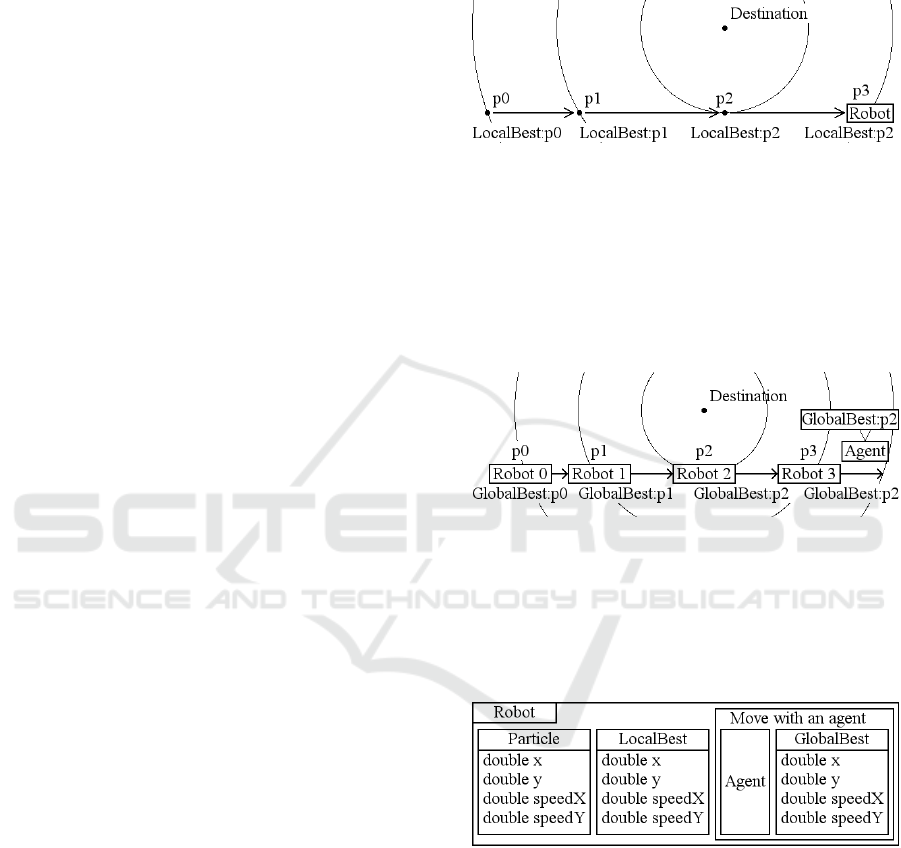
LocalBest.txt is a file that records parameters of a
local best particle. Each robot holds its own file. The
agent records the nearest neighbour coordinates on
the trajectory of the robot in LocalBest.txt as shown
in Figure 7.
Figure 7: LocalBest at each point.
GlobalBest.txt is a file that records parameters of
a global best particle. This file moves with the agent
and shares among the robots as the global best for the
robots toward the destination. The agent records in
GlobalBest.txt the coordinates of the robot that was
the closest to the destination among the robots that it
got through as shown in Figure 8.
Figure 8: GlobalBest at each robot.
Figure 9 shows a robot’s local directory. The
robot’s control computer possesses Particle.txt and
LocalBest.txt in its local directory. The visiting agent
possesses GlobalBest.txt, but it is a separate file so
that the control computer can access this file as well.
Figure 9: Particle files in the robot’s local directory.
4.2 Search Agent
Our agents uses PSO to search. The agents perform
three tasks to search as follows:
1. acquisition of parameters necessary for PSO,
2. update of parameters with acquired coordinates,
and
3. recording of updated parameters.
HAMT 2019 - Special Session on Human-centric Applications of Multi-agent Technologies
318
The robots approach the destination by the agents’
repetitions of these three tasks, i.e. acquiring,
updating and recording of parameters among the
colleague search robots.
The agent reads the parameters from the files in
the robot’s local directory. We use an orthogonal
coordinate system, and the x velocity and the y
velocity are provided as parameters for each robot.
Every robot first needs to set its own parameters and
local best. Therefore, the agent needs to determine
whether the robot of the destination has already been
initialized. We decided to use an empty file named
Initialized.txt to determine if the parameters of the
robot were initialized. The agent causes the robot that
executed the agent to create Initialized.txt. The agent
determines whether data has been initialized, based
on whether Initialized.txt exists in the robot.
When the agent is executed, it first checks
whether the robot that is running the agent has
Initialized.txt. If Initialized.txt does not exist in the
robot, the agent initializes the parameters, creates
Initialized.txt, and then acquires the particle data. If
Initialized.txt exists, i.e. it is already initialized, the
agent acquires particle data immediately.
In parameters acquisition, the agent reads each
data file and obtains parameters as local variables. If
the distance from the current robot to the destination
is closer than the distance from the local best
coordinates or the global best coordinates, the local
best or global best is updated with the current
coordinates. After obtaining the parameters, it
updates the parameters. When updating, the agent
substitutes the acquired coordinates into the
calculation formula of PSO, i.e. equation (1) and (2),
and modifies the coordinates and speed. After
updating the particle data, the agent records the
updated data in each file and moves with
GlobalBest.txt to another robot. The agent repeats
these steps of processing with the next destination.
4.3 Experiment
We have constructed a simulator of multi-robot
system based on our multi-agent system, and
conducted an experiment in order to demonstrate that
our agent system is feasible for searching with PSO.
We have set the search field as a two-dimensional
field of 1024 × 1024 and set the destination as (512,
512). We set parameters for each of the three robots
as follows:
Robot 1 (x=0, y=0, speedX=1, speedY=1).
Robot 2 (x=768, y=256, speedX=-1, speedY=0).
Robot 3 (x=256 y=1024, speedX=1, speedY=0).
In this experiment, assuming that there is no local
solution, we updated the velocity of each particle with
a simplified formula with an inertial constant set to
0.9 and a random number
associated with local
best and global best fixed at 0.5.
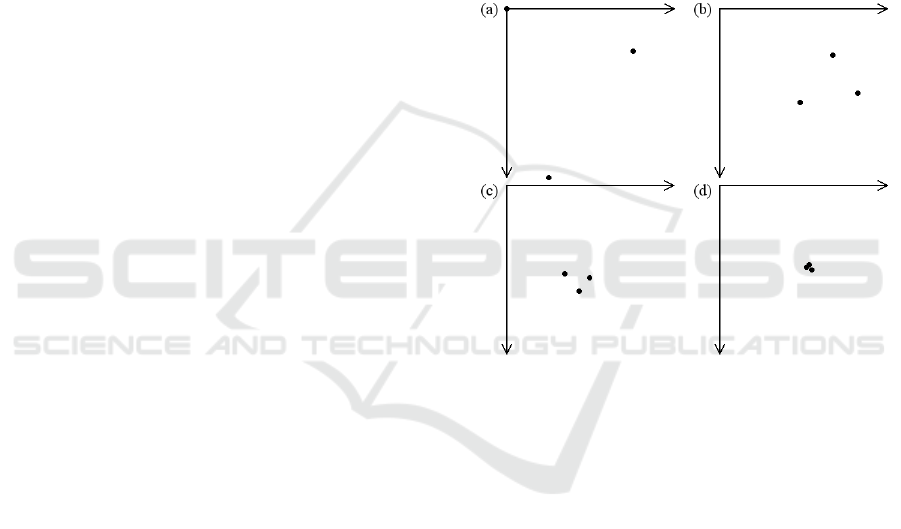
Figure 10 shows the result. Figure 10 (a) shows
the initial step, Figure 10 (b) shows the situation after
ten steps, Figure 10 (c) shows the situation after thirty
steps, and Figure 10 (d) shows the situation after fifty
steps. In comparison with the initial values of robot 1,
x approached 462.23 and y approached 510.387. In
comparison with the initial values of robot 2, x
approached 243.33 and y approached 242.832. In
comparison with the initial values of robot 3, x
approached 224.881 and y approached 479.691.
Figure 10: The position of each particle.
We have observed that the whole particles
approached to the optimal solution. From this
observation, we can conclude that our agent system
works well for search robot using PSO. Although the
simulation uses only three robots in this simple
experiment, the behaviors of the agents are as
expected, and we can expect that the many robots can
cooperatively search for a target. We believe that it is
possible to search for multiple robots in an actual
machine by acquiring the coordinates with GPS.
5 CONCLUSIONS
We have developed an agent system in C ++ language.
The system is designed and constructed to be easily
extensible so that we can add and modify functions
by extending the base classes. Since our agent system
can perform multi-hop communication in ad-hoc
mode, we believe that it can be used for less
Development of Agent System for Multi-robot Search
319

restrictions and wide range of applications. For
example, we can record the address of devices that
passed while the agent was moving, and use it to
return to the transmitter of the agent.
We have developed a simulator of a multi-robot
system to demonstrate the feasibility of our agent
system. When the user executes the agent system, the
agents move to robots that mimic PSO in the multi-
robot system. We could demonstrate the feasibility of
our agent system on a set of search robots.
In the current system, each agent is passed as a
program file, and when it arrives at the destination,
the agent does not have any local data. Local data are
also sent with the agent so that the agent acquires the
necessary data from the file. This is a disadvantage.
We will re-design the agent system so that the agent
can move with its own environment and maintain its
own state even during execution.
The current system does not allow interruption
during the execution and the migration of the agent.
At the next stage, we will extend the agent system so
that execution can be interrupted and moved to a
destination. And then, we will build an actual multi-
robot system for search as a future work.
ACKNOWLEDGEMENTS
This work is partially supported by Japan Society for
Promotion of Science (JSPS), with the basic research
program (C) (No. 17K01304), Grant-in-Aid for
Scientific Research (KAKENHI) and Suzuki
Foundation.
REFERENCES
Braun, P. and Rossak, W.R., 2005. Mobile Agents: Basic
Concepts, Mobility Models, and the Tracy Toolkit,
Morgan Kaufmann.
Ishiwatari, H., Sumikawa, Y., Takimoto, M. and
Kambayashi, Y., 2017. Cooperative Control of Multi-
Robot System Using Mobile Agent for Multiple Source
Localization, In Eighth International Conference on
Swarm Intelligence, pages 210-221.
Kambayashi, Y. and Takimoto, M., 2005. Higher-Order
Mobile Agent for Controlling Intelligent Robots,
International Journal of Intelligent Information
Technologies, 1(2), 28-42.
Kambayashi, Y., Nishiyama, T., Matsuzawa, T., and
Takimoto, M., 2016. An Implementation of an Ad hoc
Mobile Multi-Agent System for a Safety Information,
In Thirty-sixth International Conference on
Information Systems Architecture and Technology,
AICS vol. 430, pages 201-213.
Kennedy, J. and Eberhart, R., 1995. Particle swarm
optimization, In IEEE International Conference on
Neural Networks 4, pages 1942-1948.
Nagata, T., Takimoto, M. and Kambayashi, Y., 2013.
Cooperatively Searching Objects Based on Mobile
Agents, Transaction on Computational Collective
Intelligence XI, pages 119-136.
Nishiyama, H., Ito, M., Kato, N., 2014. Relay-by-
Smartphone: Realizing Multi-Hop Device-to-Device
Communications. IEEE Communications Magazine,
vol. 52, no. 4, Apr, pp. 56-65.
Oda, K., Takimoto, M. and Kambayashi, Y., 2018. Mobile
Agents for Robot Control Based on PSO, In Tenth
International Conference on Agents and Artificial
Intelligence, pages 220-227.
Stone, P. and Veloso, M., 2000. Multiagent systems: A
survey from a machine learning perspective,
Autonomous Robots, 8(3), 345-383.
Taga, S., Matsuzawa, T., Takimoto, M. and Kambayashi,
Y., 2017. Multi-Agent Approach for Evacuation
Support System, In Ninth International Conference on
Agents and Artificial Intelligence, pages 220-227.
Taga, S., Matsuzawa, T., Takimoto, M. and Kambayashi,
Y., 2016. Multi-Agent Approach for Return Route
Support System Simulation, In Eighth International
Conference on Agents and Artificial Intelligence, pages
269-274.
Taga, S., Matsuzawa, T., Takimoto, M., Kambayashi, Y.,
2018 Multi-agent Base Evacuation Support System
Using MANET, In Tenth International Conference on
Computational Collective Intelligence, LNAI 11055,
pages 445-454.
HAMT 2019 - Special Session on Human-centric Applications of Multi-agent Technologies
320
