
The Experiential Heterogeneous Earliest Finish Time Algorithm for
Task Scheduling in Clouds
Artan Mazrekaj
1
, Arlinda Sheholli
2
, Dorian Minarolli
3
and Bernd Freisleben
4
1
Faculty of Contemporay Sciences and Technologies, SEEU University, Tetovo, Republic of North Macedonia
2
Faculty of Electrical and Computer Engineering, University of Prishtina, Prishtina, Kosovo
3
Faculty of Information Technology, Polytechnic University of Tirana, Tirana, Albania
4
Department of Mathematics and Computer Science, University of Marburg, Marburg, Germany
Keywords: Cloud Computing, Task Scheduling, Resource Allocation.
Abstract: Task scheduling in cloud environments is the problem of assigning and executing computational tasks on the
available cloud resources. Effective task scheduling approaches reduce the task completion time, increase the
efficiency of resource utilization, and improve the quality of service and the overall performance of the
system. In this paper, we present a novel task scheduling algorithm for cloud environments based on the
Heterogeneous Earliest Finish Time (HEFT) algorithm, called experiential HEFT. It considers experiences
with previous executions of tasks to determine the workload of resources. To realize the experiential HEFT
algorithm, we propose a novel way of HEFT rank calculation to specify the minimum average execution time
of previous runs of a task on all relevant resources. Experimental results indicate that the proposed experiential
HEFT algorithm performs better than HEFT and the popular Critical-Path-on-a-Processor (CPOP) algorithm
considered in our comparison.
1 INTRODUCTION
The Infrastructure-as-a-Service (IaaS) service model
in cloud computing can be used to adjust the capacity
of cloud resources depending on changing demands
of applications. This feature is known as auto-scaling
(Malawski et al., 2012).
Task scheduling in cloud infrastructures is the
problem of assigning tasks to appropriate resources
(Bailin et al., 2014). Task scheduling can have a
significant impact on the performance of the system
and is particularly challenging when the cloud
resources are heterogeneous in terms of their
computation, memory, and communication
characteristics, due to different execution speeds,
memory capacities, and communication rates
between processors.
Typically, the scheduling process in the cloud
consists of several phases (Choudhary and Peddoju,
2012): resource discovery and filtering, where a
broker discovers the resources in the network and
collects their status information; resource selection,
where the target resources are selected, based on the
main parameters of the task and the resources; task
submission, where tasks are submitted to selected
resources. Task scheduling algorithms select and
allocate suitable resources to tasks such that the
overall execution can be completed to satisfy
objective functions specified by users or cloud
providers (Singh and Singh, 2013; Cui and Xiaoqing,
2018). For example, to improve Quality of Service
(QoS) for users and maximize profit for cloud
providers, parameters such as resource utilization,
throughput, performance, execution times,
computational cost, bandwidth, energy consumption,
and Service Level Agreements (SLAs) may be
considered (Dubey et al., 2018).
The task scheduling problem can be classified into
static and dynamic scheduling. In static scheduling,
all information about tasks such as execution and
communication costs for each task and the
relationship with other tasks are known in advance. In
dynamic scheduling, there is no prior information,
i.e., decisions are made at runtime (Arabnejad and
Barbosa, 2014).
In this paper, we present a novel dynamic task
scheduling algorithm for cloud environments with
heterogeneous resources. It extends the
Heterogeneous Earliest Finishing Time (HEFT)
algorithm by utilizing past experiences with task
Mazrekaj, A., Sheholli, A., Minarolli, D. and Freisleben, B.
The Experiential Heterogeneous Earliest Finish Time Algorithm for Task Scheduling in Clouds.
DOI: 10.5220/0007722203710379
In Proceedings of the 9th International Conference on Cloud Computing and Services Science (CLOSER 2019), pages 371-379
ISBN: 978-989-758-365-0
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
371

executions, hence we call it the experiential HEFT
(EHEFT) algorithm. It uses an additional parameter
that calculates the minimum average execution time
of previous runs of a task on all relevant resources.
This parameter equips the proposed EHEFT with the
ability to take the workload and processing power of
resources into account when assigning a task to a
processor. It gives priority to a resource that in the
past has executed the task faster than others.
Experimental results show that our EHEFT algorithm
performs better and is more efficient than other than
the original HEFT and the popular Critical-Path-on-
a-Processor (CPOP) algorithm considered in our
comparison.
This paper is organized as follows. Section 2
describes related work on task scheduling. In Section
3, the task scheduling problem is formulated. HEFT
and CPOP are described in Section 4. Our novel
EHEFT algorithm is introduced in Section 5.
Experimental results are presented in Section 6.
Section 7 concludes the paper and outlines areas for
future work.
2 RELATED WORK
Several approaches have been presented in the
literature to solve the problem of task scheduling. The
general task scheduling problem is NP-hard (Garey
and Johnson, 1979). Thus, research in this field
focuses on finding suitable low-complexity heuristics
that perform well.
Parsa and Entezari-Maleki (2009) have proposed
a task scheduling algorithm called RASA (Resource
Aware Scheduling Algorithm) that takes the
scalability characteristics of resources into account.
RASA is compared to two traditional scheduling
algorithms, Max-Min and Min-Min, making use of
their advantages and avoiding their disadvantages.
RASA is more efficient in task scheduling and
achieves better load balancing.
To achieve better results than RASA, an improved
version of the Max-Min algorithm has been proposed
Elzeki et al., (2012). Their improved Max-Min
algorithm is based on the expected execution time as
a basis for selecting tasks instead of completion time.
This approach has resulted in better load balancing
and smaller makespans than other algorithms used for
comparison.
Hu et al., (2009) have proposed a probability
dependent priority algorithm to determine the
allocation strategy that requires the smallest number
of servers to execute tasks.
Pandey et al., (2010) have proposed a scheduling
strategy that is based on a Particle Swarm
Optimization (PSO) algorithm to schedule
applications to cloud resources. It takes computation
cost and data transmission into account. The
algorithm is compared to the existing heuristic
algorithm ’Best Resource Selection’ (BRS) where
PSO can achieve three times of cost savings
compared to BRS, and the best distribution of the
workload to resources.
To schedule large-scale workflows with various
QoS parameters, Chen and Zhang (2009) have
proposed an Ant Colony Optimization (ACO)
algorithm. The algorithm intends to find a solution
that meets all QoS constraints and optimizes the user
preferred QoS parameters.
Malawski et al., (2012) have addressed the issue
of efficient management under budget and deadline
constraints in IaaS clouds. They propose various
static and dynamic algorithms for both task
scheduling and resource provisioning. From the
results it is evident that an admission procedure based
on workflow structure and the task’s estimated
execution time can improve quality and performance.
Their work considers only a single type of virtual
machines (VM) and does not take heterogeneity of
IaaS clouds into account.
Byun et al., (2011) have proposed an architecture
for automatically executing large-scale workflow
applications on dynamically and elastically
provisioned computing resources. The authors
describe an algorithm that estimates the optimal
number of resources to execute a workflow within a
user specified finish time. The algorithm also
generates a task to resource mapping and is designed
to run online. This approach considers the elasticity
of cloud resources, but does not consider the
heterogeneity of computing resources.
Rodriguez and Buyya (2014) have proposed a
resource provisioning and scheduling strategy for
scientific workflows in cloud infrastructures. The
authors model this strategy through Particle Swarm
Optimization, to optimize the total execution cost
while meeting deadline constraints. In their model,
there are some IaaS cloud properties such as
heterogeneity, elasticity, and dynamicity of
resources. Moreover, performance variations and VM
boot time parameters are considered.
Canon et al., (2008) have analyzed 20 directed
acyclic graph (DAG) scheduling heuristics by
investigating how robustness and makespan are
correlated. The authors address the issue whether
dynamically changing the order of tasks on their
processors can improve robustness. The authors
CLOSER 2019 - 9th International Conference on Cloud Computing and Services Science
372
conclude that the HEFT algorithm is one the best
algorithms in terms of robustness and schedule
length.
In contrast to the existing task scheduling
approaches presented above, we propose a novel
approach as an extended version of the HEFT
algorithm that takes the workload of resources
depending on experiences with previous executions
of tasks into account. In the following sections, we
explain task scheduling in general and the CPOP and
HEFT algorithms in particular to motivate the design
of our novel algorithm.
3 TASK SCHEDULING
To divide an application into tasks with appropriate
sizes, we use DAGs. Each task of a DAG corresponds
to the sequence of operations and a directed edge
represents the dependency between the tasks.
More precisely, a DAG is represented by the
graph G = (V, E), where V is the set of v tasks and E
is the set of e edges between the tasks. Each edge (i,
j)
E represents the dependency such that task n
i
should complete its execution before task n
j
starts.
If a task has no a parent task, this task is defined
as the entry task of a workflow of tasks. If a task has
no a child, this task is defined as the exit task of a
workflow of tasks.
From the DAG, we derive a matrix W that is a v x
p computation cost matrix, where v is the number of
tasks and p is the number of processors; w
i,j
represents
the estimated execution time to complete task v
i
on
processor v
j
. The average execution time of task v
i
is
defined in Equation (1) (Llavarasan and Thambidurai,
2007; Arabnejad and Barbarosa, 2014):
,ij
jP
i
w
w
p
(1)
Each edge (i, j)
E is associated with a non-negative
weight c
i,j
which represents the communication cost
between task v
i
and v
j
. The average communication
cost of an edge (i, j) is defined in Equation (2):
,
,
ij
ij
data
cL
B
(2)
L
is the average communication startup time, and
B
is the average transfer rate among the processors;
data
i,j
is the amount of data required to be transmitted
from task v
i
to task v
j
. In cases when tasks v
i
and v
j
are scheduled to run on the same processor, the
communication cost is considered to be zero, because
the intra-processor communication cost is negligible
compared to the inter-processor communication cost.
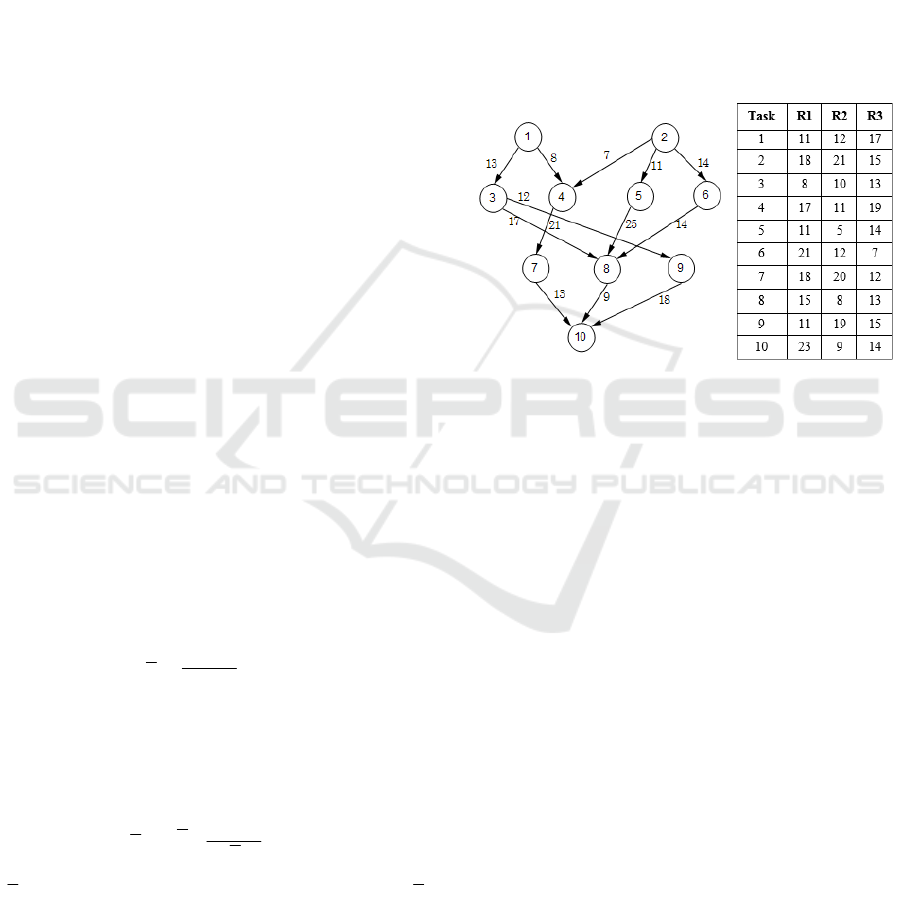
A task workflow example and a computation cost
matrix of tasks 1-10 for the resources R1, R2, R3 is
shown in Figure 1.
An popular metric in task scheduling is the
makespan or schedule length, which defines the finish
time of the last task in the given DAG. The makespan
is defined in Equation (3):
max{ ( )}
exit
makespan AFT n
(3)
where AFT(n
exit
) represents the Actual Finish Time of
the exit node.
Figure 1: An example of a task graph and a computation
time matrix of the tasks for each resource.
Furthermore, the Earliest Start Time EST (n
i
, p
j
)
of a node n
i
on a processor p
j
is defined in Equation
(4):
,
()
( , ) max{ ( ), max ( ( ) )}
mi
i j avail j m m i
npredn
EST n p T p AFT n c
(4)
where T
avail
is the earliest time at which processor p
j
is ready to execute the task. pred(ni) is the set of
immediate predecessor tasks of task n
i
. The inner max
block in the EST equation denotes the time at which
all data needed by n
i
arrive at processor p
j
. The
communication cost c
m,i
is zero if the predecessor
node n
m
is assigned to processor p
j
.
Finally, EFT(n
i
,p
j
) defines the Earliest Finish
Time of a node n
i
on a processor p
j
, which is defined
in Equation (5):
,
(, ) (, )
ij ij ij
E
FT n p EST n p w
(5)
4 CPOP AND HEFT
In this section, we describe two popular algorithms
for task scheduling, namely the Critical-Path-On-a-
Processor (CPOP) and the Heterogeneous-Earliest-
The Experiential Heterogeneous Earliest Finish Time Algorithm for Task Scheduling in Clouds
373

Finish-Time (HEFT) algorithms (Topcuoglu et al.,
2002; Arabnejad and Barbosa, 2014).
Canon et al., (2008) have compared 20 scheduling
algorithms and have concluded that both algorithms
perform well, but the HEFT algorithm is the best
algorithm in terms of makespan. Topcuoglu et al.
(Topcuoglu et al., 2002) also consider the HEFT
algorithm among the best list-based heuristic
algorithms, and use the CPOP algorithm, among
others, for comparison.
In both algorithms, the tasks are ordered based on
a scheduling priority defined by a ranking function.
The rank value for an exit task n
i
is:
()
ii
rank n w
(6)
For other tasks, the rank values are computed
recursively based on the Equations (1), (2) and (6), as
defined in Equation (7):
,
()
() ( ())
max
ji
ii ij j
nsuccn
rank n w c rank n
(7)
where succ(n
i
) is the set of immediate successors of
task n
i
,
,ij
c
is the average communication cost of
edge (i, j), and
i
w
is the average execution time of
task n
i
.
4.1 CPOP
The CPOP algorithm consists of two phases: task
prioritization and processor selection.
The task prioritization phase assigns the priority
of each task by computing the rank values for all
tasks. In CPOP, for a given application the graph uses
a critical path, where the length of this path is the sum
of the communication costs of the tasks on the path
and the communication costs between the tasks along
the path. The sum of rank values set the priority of
each task. Initially, the entry task is the selected task
and marked as a critical path task. An immediate
successor (of the selected task) that has the highest
priority value is selected and is marked as a critical
path. This process is repeated until the exit node is
reached (Topcuoglu et al., 2002). In the processor
selection phase, the task that has the highest priority
is selected for execution. If the selected task is on the
critical path, it will be scheduled on the critical path
processor. Otherwise, the task is assigned to a
processor that minimizes the earliest execution finish
time. The CPOP algorithm has O (v
2
x p) time
complexity, where v is the number of tasks and p is
the number of processors (Llavarasan and
Thambidurai, 2007; Arabnejad and Barbosa, 2014).
4.2 HEFT
Similarly, the HEFT algorithm also has the same two
phases: task prioritization and processor selection
(Topcuoglu et al., 2002; Arabnejad and Barbosa,
2014).
In the task prioritization phase, HEFT assigns the
priorities of all tasks by computing the rank for each
task, which is based on mean computation time and
mean communication cost. The task list is ordered by
decreasing of their rank values.
The processor selection phase schedules the tasks
on the processors that give the Earliest Finish Time
(EFT) for the task. The algorithm uses an insertion
policy that tries to insert a task at the earliest idle time
between two already scheduled tasks on a processor.
The slot should have enough capacity to
accommodate the task.
The HEFT algorithm also has O (v
2
x p) time
complexity, where v is the number of tasks and p is
the number of processors (Topcuoglu et al., 2002;
Llavarasan and Thambidurai, 2007; Arabnejad and
Barbosa, 2014).
5 EXPERIENTIAL HEFT
We now present a novel task scheduling algorithm,
called experiential HEFT (EHEFT), which gives the
original HEFT algorithm the ability to take the
workload and computational power of resources into
account when assigning a task to processor. In the
EHEFT algorithm, the average execution time of a
task is calculated by the definition given in Equation
(1). Furthermore, the calculation of the average
communication cost is performed according to
Equation (2). As an extension of Equation (7), we
have added a parameter that calculates the rank by
considering the minimum average execution time of
the task on each relevant resource. This novel rank
calculation is shown in Equation (8):
,
0
,
()
() ( ())min
max
j
ji
n
ij
i
ii ij j
jR
nsuccn
j
w
rank n w c rank n
n
(8)
where R represents the set of processors; j is a
processor of the set of processors. The execution time
of the task i on processor j is defined by w
i,j
, while the
number of previous executions of the task in
processor j is defined by n
j
.
The proposed EHEFT algorithm is shown in
Algorithm 1.
CLOSER 2019 - 9th International Conference on Cloud Computing and Services Science
374

To prioritize processors that have executed a
given task in a more efficient manner in the past, a
sum and a count of previous execution times of tasks
for each of the resources in the cloud is stored. When
there is no such data, the EHEFT algorithm performs
exactly as the HEFT algorithm itself. Therefore, the
EHEFT algorithm we propose is highly dependent on
the values of the past execution times of tasks.
Algorithm 1: Experiential HEFT Algorithm.
1: Compute the computation cost for each
task according to Eq.(1)
2: Compute the communication cost of
edges according to Eq.(2)
3: Compute the average execution time of
previous runs:
for each task
for each machine do
sum up the time of the task’s
previous executions in the
assigned processor
end for
4: Calculate the minimum as the
proportion of the sum of Step 3 and
the number of executions of a task
in the assigned processor
5: end for
6: Compute the rank value for each task
according to Equation (8)
7: Sort the tasks in a scheduling list by
decreasing order of task rank values
8: while there are unscheduled tasks in
the list
9: Select the first task i from the
list
for each processor m do
Compute the EFT(i,m) value
end for
Assign task i to processor m that
minimized EFT of task i.
10: end while
Assuming a high heterogeneity between cloud
resources, variable processing powers, and
workloads, as well as taking into account that some
tasks are better suited for a particular processor
architecture than others, by including the minimum
average execution time of previous runs of a task in
the resources of the cloud, the EHEFT algorithm
gives precedence to a processor that has performed
better in executing a given task in the past.
6 EXPERIMENTAL RESULTS
We now present experimental results of our proposed
EHEFT algorithm compared to the existing HEFT
and CPOP algorithms. The tests were conducted on
an Intel Core i7-6500U CPU with a 2.50 GHz × 4
speed, 16 GB of RAM, on Ubuntu 16.04 LTS.
To evaluate the performance of the EHEFT
algorithm, task graphs that were generated randomly
are considered. We have implemented and simulated
the three algorithms using the Python programming
language. Our simulator has five input parameters:
the number of resources (i.e., processors) in the cloud,
the number of DAG nodes (i.e., tasks), connections
between tasks, resource heterogeneity, and previous
run statistics for each task. For simplicity, constant
values are set for the average computational and
communication costs. The simulator defines a set of
virtual resources with heterogeneous processing
powers, as well as current computational workloads
and communication costs for the given input DAG.
Resource heterogeneity is achieved by setting the
Beta parameter in the simulator. Its value defines the
ratio of the differences of processing powers between
resources in the cloud.
The simulator is fed with different input values to
test the variance of the algorithm in terms of
makespan and runtime under different conditions.
During our tests, the following parameters were used:
Beta = {0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9, 1.0}
Number of DAG Tasks = {5, 10, 15, 20, 25}
Connectivity = {0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8,
0.9, 1.0}
Number of Processors = {2, 3, 4, 5, 6}
Our experiments are run for each of the tasks in each
of the processors. Such test runs were performed to
collect statistics for the execution times that were then
used to calculate the minimum average execution
time for past runs of a given task on all cloud
resources. To avoid that this additional parameter
biases the ranking function, a scaling parameter is
used. This scaling parameter determines the weight of
the minimum average execution time for past runs in
the overall calculation of the rank. For all compared
algorithms, the simulation conditions were the same.
We use the following performance metrics for our
evaluation of the proposed approach.
6.1 Scheduling Length Ratio (SLR)
To evaluate a schedule for a single DAG, the most
commonly used metric is the makespan. The
makespan represents the finish time of the last task in
the scheduled DAG, as shown in Equation (3).
Considering that a large set of task graphs with
different properties is used, the schedule length
should be normalized to a lower bound, which is
known as the Schedule Length Ratio (SLR), defined
in Equation (9).
The Experiential Heterogeneous Earliest Finish Time Algorithm for Task Scheduling in Clouds
375

,
min { }
j
iMIN
p
Qij
nCP
makespan
SLR
w
(9)
The denominator in the SLR metric is the minimum
computation cost of the critical path tasks,
represented as CP
MIN
.
Figures 2-5 show the makespan of the three
algorithms calculated by the example task graph and
computation time matrix of the tasks in each
processor of Figure 1.
The calculation of the makespan is performed for
(a) Number of Tasks (Figure 2), (b) Connectivity
(Figure 3), (c) Number of Processors (Figure 4), and
(d) Processor Range (Figure 5).
In Figure 2, the simulations are run for five
different DAG nodes, with an increasing number of
nodes. As expected, the makespan increases with the
number of nodes for each of the algorithms we
evaluated. EHEFT performs better than the other
algorithms, because it considers the heterogeneity of
resources when calculating the rank for a task. It
assigns the execution of a task to a resource that not
only has the best present conditions to achieve the
earliest finish time, but that has also shown to do so
in the past.
Figure 2: Makespan for Number of Tasks.
Figure 3 shows that increasing the connectivity
between nodes of the input DAG also increases the
makespan of the algorithms linearly. The higher the
number of dependent tasks on the graph, the more
time it takes for the algorithm to assign and execute
the tasks.
Therefore, it is important to assign tasks that are
part of critical paths to resources that can execute
them in the fastest manner. In our simulations, we
have put more load on the tasks in the critical path.
Thus, the results indicate the ability of EHEFT to
assign such tasks to resources with the highest
processing power.
Figure 3: Makespan for Connectivity.
Figure 4 shows that increasing the number of
processors and a constant node number for the input
DAG decreases the makespan. The improvement in
performance of the EHEFT algorithm is due to the
variance in the calculation of the rank that the
statistics of previous runs provide.
Figure 4: Makespan for Number of Processors.
The main advantage of EHEFT over HEFT and
CPOP is the processor range parameter Beta, as
shown in Figure 5. EHEFT considers the processing
efficiency of a resource for a task, given its previous
run statistics. The performance of EHEFT improves
with the increase of the processor range, because it is
the factor that makes the highest difference with
respect to the average past execution time parameter.
Figure 5: Makespan for Processor Range.
CLOSER 2019 - 9th International Conference on Cloud Computing and Services Science
376
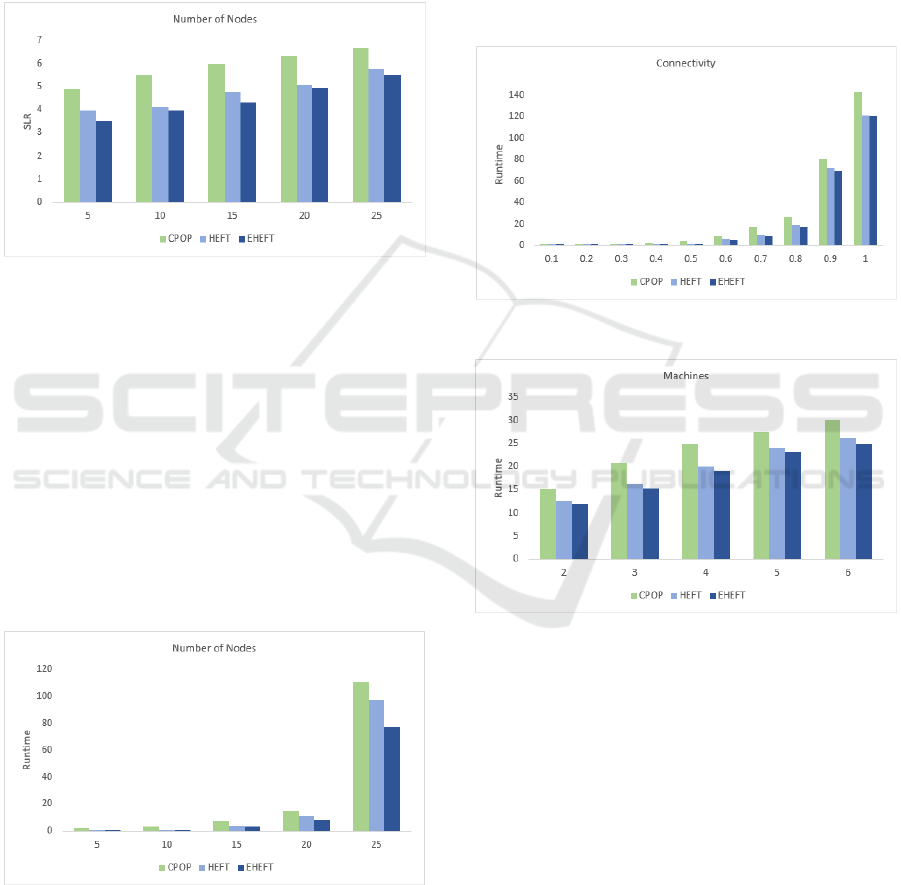
In Figure 6, we present the SLR value for each of
algorithms calculated from the number of nodes. The
graph shows that the SLR value for EHEFT is lower
than for the HEFT and CPOP algorithms.
6.2 Runtime
The runtime metric represents the execution time to
obtain the output of a schedule for a given task graph.
Figure 6: Scheduling Length Ratio.
The results for the runtimes of our performed
experiments are shown in the graphs below.
Figures 7-10 show the runtimes of each of the
algorithms calculated for the parameters (a) Number
of Tasks (Figure 7), (b) Connectivity (Figure 8), (c)
Number of Processors (Figure 9), and (d) Processor
Range (Figure 10).
Figure 7 shows that for small numbers of DAG
nodes the difference in runtime between EHEFT and
HEFT is small. The improvement in performance that
the minimum average execution time of the task for
each resource gives is only apparent when the number
of nodes in the input DAG increases.
Figure 7: Runtime for Number of Tasks.
Figure 8 shows that increasing the connectivity
between the nodes in the graph results in an increased
runtime for the algorithms. The small difference in
performance between EHEFT and HEFT is due to the
difference in the handling of critical path tasks in the
overall runtime. The CPOP algorithm takes more
time to execute due to its two phase rank calculation.
As shown in Figure 9, task assignment and
execution are performed in a faster manner with an
increasing number of simulated virtual resources, as
indicated by the decrease in the runtimes of the
algorithms. The EHEFT algorithm gains an edge in
performance due to its ability to assign the heavy
loaded tasks and the ones in the critical path to better
performing resources.
Figure 8: Runtime for Connectivity.
Figure 9: Runtime for Number of Processors.
Figure 10 shows that increasing the processor
range improves the performance of all the algorithms
that we evaluated. Since the CPOP algorithm assigns
only tasks on the critical path to critical path
processors, the EHEFT and HEFT algorithms show
better results due to the fact that not only critical path
tasks may be assigned to high performance resources.
Tasks that take more time to process and that are not
on the critical path of the graph are better assigned to
resources through the HEFT and EHEFT algorithms.
The difference in performance between the EHEFT
and HEFT algorithm lies in the fact that EHEFT
assigns tasks to resources that were better suited to
execute such tasks in the past.
The Experiential Heterogeneous Earliest Finish Time Algorithm for Task Scheduling in Clouds
377

Figure 10: Runtime for Processor Range.
7 CONCLUSION
In this paper, we have presented a novel task
scheduling algorithm for cloud environments, called
Experiential Heterogeneous Earliest Finish Time
(EHEFT) algorithm. In EHEFT, we have modified
the rank calculation of the original HEFT algorithm
by adding a parameter that specifies the minimum
average execution time of a task on each relevant
resource. The EHEFT algorithm performs better than
the original HEFT and CPOP algorithms in terms of
scheduling length ratio and runtime.
There are several areas for future research. First,
we will investigate and experimentally evaluate other
heuristic algorithms for task scheduling that consider
the priority of tasks. Second, for more efficient task
scheduling, other factors such as availability and
scalability should be considered. Finally, it would be
interesting to investigate multi-criteria and other
workflow-aware strategies in cloud environments,
including multiple virtual machine types and cloud
deployment models.
REFERENCES
Arabnejad, H., and Barbosa, J. G. (2014). List Scheduling
Algorithm for Heterogeneous Systems by an Optimistic
Cost Table. IEEE Transactions on Parallel and
Distributed Systems, 25(3), pages 1-14.
Bailin, P., Yanping, W., Hanxi, L., and Jie Q. (2014). Task
Scheduling and Resource Allocation of Cloud
Computing Based on QoS. Advanced Materials
Research, Vols. 915-916, pages 1382-1385.
Byun, E. K., Kee, Y. S., Kim, J. S., and Maeng, S. (2011).
Cost Optimized Provisioning of Elastic Resources for
Application Workflows. Future Generation Computer
Systems, 27(8), pages 1011–1026.
Canon, L.C., Jeannot, E., Sakellariou, R. and Zheng, W.
(2008). Comparative Evaluation of the Robustness of
DAG Scheduling Heuristics. Grid Computing -
Achievements and Prospects, edited by Sergei
Gorlatch, Paraskevi Fragopoulou and Thierry Priol,
pages 73-84. Springer.
Chen, W. N. and Zhang, J. (2009). An Ant Colony
Optimization Approach to a Grid Workflow Scheduling
Problem with Various QoS Requirements. IEEE
Transactions on Systems, Man, and Cybernetics, Part
C: Applications and Reviews, 39(1), pages 29-43.
Choudhary, M., and Peddoju, S. K. (2012). A Dynamic
Optimization Algorithm for Task Scheduling in Cloud
Environment. Journal of Engineering Research and
Applications (IJERA), 2(3), pages 2564-2568.
Cui, Y., and Xiaoqing, Z. (2018). Workflow Tasks
Scheduling Optimization Based on Genetic Algorithm
in Clouds. 3rd IEEE International Conference on
Cloud Computing and Big Data Analysis (ICCCBDA),
pages 6-10. IEEE.
Dubey, K., Kumar, M., and Sharma, S.C. (2018). Modified
HEFT algorithm for Task Scheduling in Cloud
Environment. Procedia Computer Science, Volume
125, pages 725-732. Elsevier.
Elzeki, O. M., Reshad, M.Z., and Elsoud, M.A. (2012).
Improved Max-Min Algorithm in Cloud Computing.
International Journal of Computer Applications,
50(12):22-27.
Garey, M. R., and Johnson, D. S. (1979). Computers and
Intractability; A Guide to the Theory of NP-
completeness. 1979.
Hu, Y., Wong, J., Iszlai, G., and Litoiu M. (2009). Resource
Provisioning for Cloud Computing. Conference of the
Centre for Advanced Studies on Collaborative
Research, CASCON ’09, pages 101-111. ACM.
Llavarasan, E., and Thambidurai, P. (2007). Low
Complexity Performance Effective Task Scheduling
Algorithm for Heterogeneous Computing
Environments. Journal of Computer Sciences, 3(2),
pages 94-103.
Malawski, M., Juve, G., Deelman E., and Nabrzyski J.
(2012). Cost- and Deadline-Constrained Provisioning
for Scientific Workflow Ensembles in IaaS Clouds.
Proceedings of the International Conference on High
Performance Computing, Networking, Storage and
Analysis, pages 1–11.
Pandey, S., Wu, L., Guru, S. M., and Buyya, R. (2010). A
Particle Swarm Optimization-based Heuristic for
Scheduling Workflow Applications in Cloud
Computing Environments. In 24th IEEE International
Conference on Advanced Information Networking and
Applications (AINA). IEEE.
Parsa, S., and Entezari-Maleki, R. (2009). RASA: A New
Task Scheduling Algorithm in Grid Environment.
World Applied Sciences Journal
, 7 (Special Issue of
Computer & IT), pages 152-160.
Rodriguez, M. A., and Buyya, R. (2014). Deadline Based
Resource Provisioning and Scheduling Algorithm for
Scientific Workflows on Clouds. IEEE Transactions on
Cloud Computing, 2(2), pages 222-235.
Singh, L., and Singh, S. (2013). A Survey of Workflow
Scheduling Algorithms and Research Issues.
CLOSER 2019 - 9th International Conference on Cloud Computing and Services Science
378

International Journal of Computer Applications,
74(15), pages 21-28.
Topcuoglu, H., Hariri, S., Wu, W. Min-You. (2002).
Performance-Effective and Low-Complexity Task
Scheduling for Heterogeneous Computing. IEEE
Transactions on Parallel and Distributed Systems,
13(3), pages 260-274.
The Experiential Heterogeneous Earliest Finish Time Algorithm for Task Scheduling in Clouds
379
