
Real-time Processing of Rule-based Complex Event Queries for
Tactical Moving Objects
Yihuai Liang
1
, Jiwan Lee
1
, Bonghee Hong
1
and Woochan Kim
2
1
Department of Computer Science and Engineering, Pusan National University, Pusan, Republic of Korea
2
Agency for Defense Development, Republic of Korea
Keywords: Continuous Processing, Complex Event Processing, CQ Index, Dynamical Rule, Tactical Moving Object.
Abstract: Target data for tactical moving objects are streaming data collected in real time via radar, sonar, and other
sensors. A system of continuous complex event query with dynamic rule definitions and high performance is
needed to process that target data. We develop a continuous complex event query system with rule-based
layered architecture. A continuous processing flow is decomposed into four modules hierarchically, which
are event filtering, event capture, Continuous Queries (CQ) and Complex Event Processing (CEP). Each
module has its responsibility but works together for a completed continuous processing flow. This paper
shows that it is possible to dynamically insert, update, delete and search rule specifications of each layered
modules through the decomposition of the whole system. Many rules are registered in the system for
processing input event data continuously in real time. To improve the performance of getting matching CQs
for each incoming event, CQ index is developed. Finally, experimentations and performance evaluations are
carried out.
1 INTRODUCTION
Different from traditional database management
system, data stream management system (DSMS)
processes the input stream data then produces the
output results continuously in real time. A data stream
is a sequence of tuples that are generated
continuously and incrementally over time with no
end. Many applications process high volumes of
streaming data.
If in the following situations, it should be
considered to use DSMS: (1) Too large amounts of
interesting data to store in hard disks. For example,
data from sensor networks with a massive number of
measurement points. (2) Require real-time analysis
and feedbacks. In a DSMS, the processing model is
push-based or data-driven. It evaluates persistent
queries on transient, append-only data and outputs
results automatically if incoming data meet query
conditions. There is a trade-off between latency and
accuracy, because of processing single-pass stream
data in main memory.
Our target data from tactical moving objects are
stream data collected in real time via radar, sonar, and
other sensors. The data have the following
characteristics: (1) Temporal generating and dynamic
changing, (2) Detected data only contains information
on simple events. The data might be duplicated,
missing, outlier and so on. (3) Large volume from a
massive number of measurement points. The target
data should be processed to detect emergencies within
1 second. Our motivation is to analyze real-time
situations and make alert decisions of tactical moving
objects. We develop a DSMS with the ability of
complex event query over the target data. By using
the system, we query complex events and detect
potential threats in real time.
Figure 1: Scenarios of fighter invasion and detection by
radars and sonars.
From inputting source data to performing a
complex event query, the system goes through a
series of processing procedures, including data
filtering, data adapting, event tracking, meaning
refinement, continuous queries, and complex event
queries. The system could contain hundreds of given
rule specifications and runs based on them. It should
Liang, Y., Lee, J., Hong, B. and Kim, W.
Real-time Processing of Rule-based Complex Event Queries for Tactical Moving Objects.
DOI: 10.5220/0007735700670074
In Proceedings of the 4th International Conference on Complexity, Future Information Systems and Risk (COMPLEXIS 2019), pages 67-74
ISBN: 978-989-758-366-7
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
67
support adding, updating and deleting rule
specifications dynamically without restarting the
whole system. Several rules might work together for
a complete processing flow. So how to make it easy
and flexible to add, update or delete a rule without
affecting other rules? Finding a flexible and dynamic
way to define, organize and manage the rule
specifications is one of the motivations in this paper.
To find out matching CQs for an arriving event, a
naïve approach is to check conditions of each CQ one
by one. It is simple but time-consuming. In our
system, we build a CQ index to solve this issue.
In conclusion, our contributions in this paper are:
To propose a layered rule-based architecture for
complex event queries.
To define rule specifications based on the
decomposition of the layered architecture. In
order to make it flexible and dynamic to define,
add, update and delete a rule specification.
To develop a CQ index by using R*-tree to solve
the performance issue of CQ matching.
The rest of this paper is organized as follows. Section
2 presents an event processing flow. Section 3
presents rule definitions. Section 4 presents the CQ
index. Section 5 presents experiment and section 6
shows results of performance evaluation. Section 7
presents related work. Finally, we conclude the paper
in section 8.
2 EVENT PROCESSING FLOW
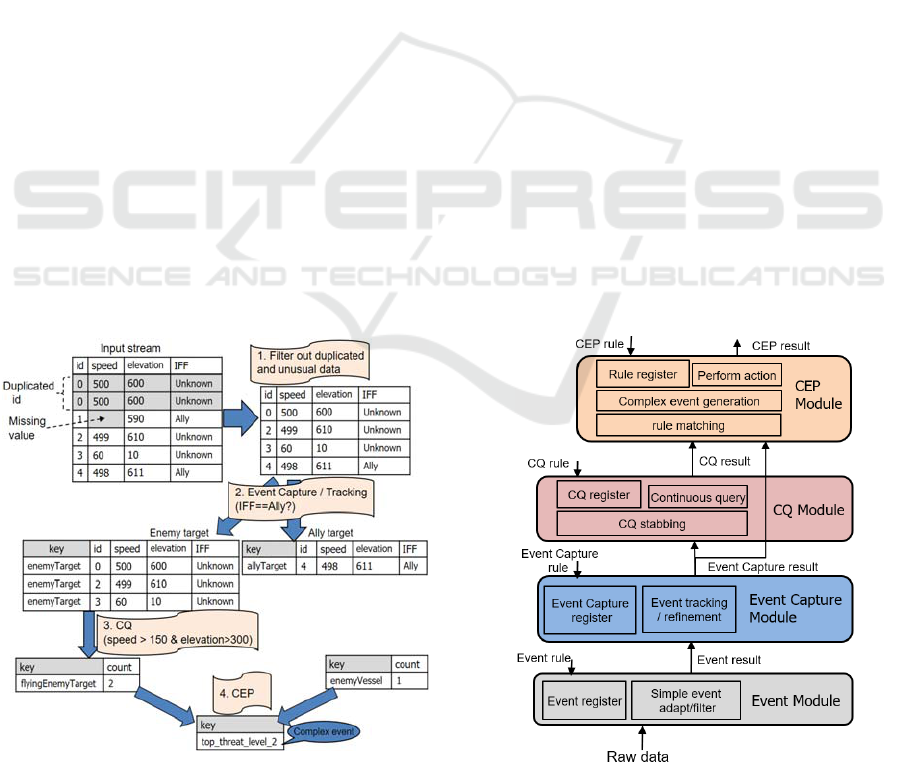
Figure 2: An example of a complex event processing flow.
Before the explanation of event processing flow, let
us take an example shown in Figure 2. First, we filter
out duplicated and unusual input stream data. Second,
we track each data and assign a new meaning to them.
Here, if a data whose field IFF equals to “Ally”, it
belongs to “allyTarget”, else belongs to
“enemyTarget”. Next, we perform CQ to count the
data of “enemyTarget” based on condition
“speed>150 & elevation > 300”. Finally, we perform
CEP to get a complex event “top_threat_level_2”.
The data from input to output goes through a
continuous processing flow. We decompose the flow
into four sub-modules to make the flow clear and
simplify rule definitions. A rule processing flow goes
through four steps as follows:
Step 1: Filter out duplicated and unusual incoming
data.
Step 2: Capture and track events to assign new
meanings to them.
Step 3: Continuous query events using operators
based on query conditions and window. The input
data is from step 2.
Step 4: Perform complex event queries over the input
simple events from step 2 or step 3. Its results can
trigger pre-defined response actions.
In Figure 3, we show the architecture and event
processing flow of our system. There are four
layers/modules, and each has its own registered rules
and output results. They connect together by their
output results to form a complete flow of continuous
complex event queries.
Figure 3: Layered architecture on continuous complex
event queries.
COMPLEXIS 2019 - 4th International Conference on Complexity, Future Information Systems and Risk
68
Each module has its responsibilities. Event
Module is responsible for filtering incoming raw data
and adapting them to simple events. Event Capture
Module is responsible for tracking and refining the
simple events from the Event Module. For example,
as for simple event that meets the condition
speed>150km/s & elevation>100m, we could assign
it new meaning: it is an event of a flying target. CQ
Module is responsible for continuous queries,
consisting of sliding/tumble windows,
stateful/stateless operators, and query expressions
and so on. CEP module is responsible for complex
event processing. It derives complex events from
multiple simple events. The module takes the output
results of the Event Capture Module and CQ Module
as input data, then performs rule matching and
responses actions.
3 RULE-BASED STREAM DATA
PROCESSING
In the previous section, we talk about layered
architecture. The system is decomposed into four
modules. Each module has its own registered rules.
Users tell the system what to do through inputting
rules for each module. In this section, we talk about
how to define rule specifications.
3.1 Rule Format of Event Filtering
The rule of this module is to filter out duplicated and
unusual data. We define the rule format of the Event
Module as follows. IF clause defines the
unduplicated fields and not unusual fields for input
data. It is the filter condition of this rule. FROM
clause defines the DDS topic name. THEN clause
defines the name of output results that satisfy the filter
conditions.
IF <not duplicate(target field)*> AND <not
unusual(target field)*>
FROM <DDS Topic>
THEN <target object>
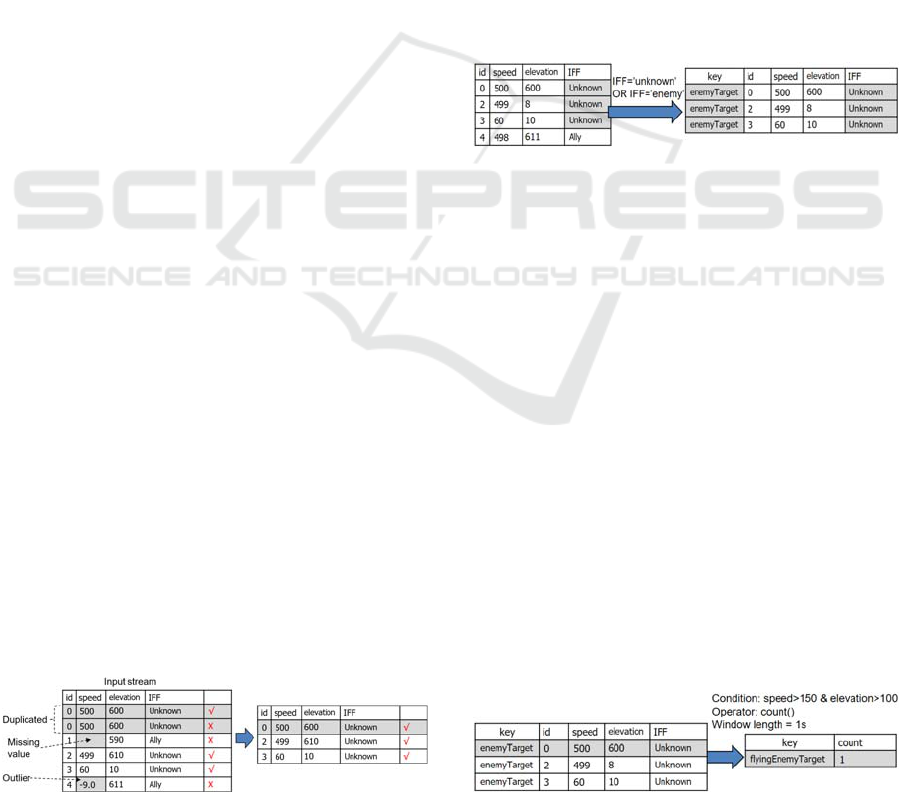
Example: filter out the data if it has duplicated id or
an unusual value of speed field (Figure 4).
Figure 4: Example of event filtering.
IF not duplicate(id) AND not unusual(speed)
FROM moving_object
THEN target_object
3.2 Rule Format of Event Capture
Event Capture Module is responsible for tracking and
refining the simple events from the Event Module. We
define the rule format of the Event Capture Module
as follows. FROM clause defines the input target
object from the Event Module. If the object satisfies
the conditions in IF clause, it will be assigned a new
meaning.
IF <condition*>
FROM <target object>
THEN <target object with new meaning>
Example: tracking enemy target objects if data meets
the condition “IFF=’unknown’ OR IFF=’enemy’”.
(IFF, Identification Friend or Foe) (Figure 5)
Figure 5: An example of event capture.
IF IFF=’unknown’ OR IFF=’enemy’
FROM moving_object
THEN enemy_object
3.3 Rule Format of CQ
CQ Module is responsible for continuous queries. A
CQ rule consists of query conditions, input data, a
window, object field names for projection and
operators. A window (sliding window or tumble
window) buffers data for supporting aggregate
operations, defined in the WINDOW clause.
IF <condition*>
FROM <target object from Event Capture Module >
WINDOW <length, trigger>
THEN <field name for projection*, operator*>
Example: query the count of flying event belonging
to an enemy in the last 1 second and output the results
every 1 second. (Figure 6)
Figure 6: An example of CQ.
Real-time Processing of Rule-based Complex Event Queries for Tactical Moving Objects
69
IF speed>150km/s AND elevation>100m
FROM enemy_object
WINDOW length=1000ms, trigger=1000ms
THEN count
3.4 Rule Format of CEP
We define the rule of CEP to indicate how to denote
a complex event. To derive a complex event from
multiple simple events, it is necessary to analyze the
relationships among different types of simple events.
The format of CEP rule is almost the same as CQ rule.
However, the input target data defined in the FROM
clause is from the Event Capture Module or CQ
Module. We define it as follows:
IF <condition*>
FROM <objects from Event Capture or CQ Module>
WINDOW <length, trigger>
THEN <complex event>
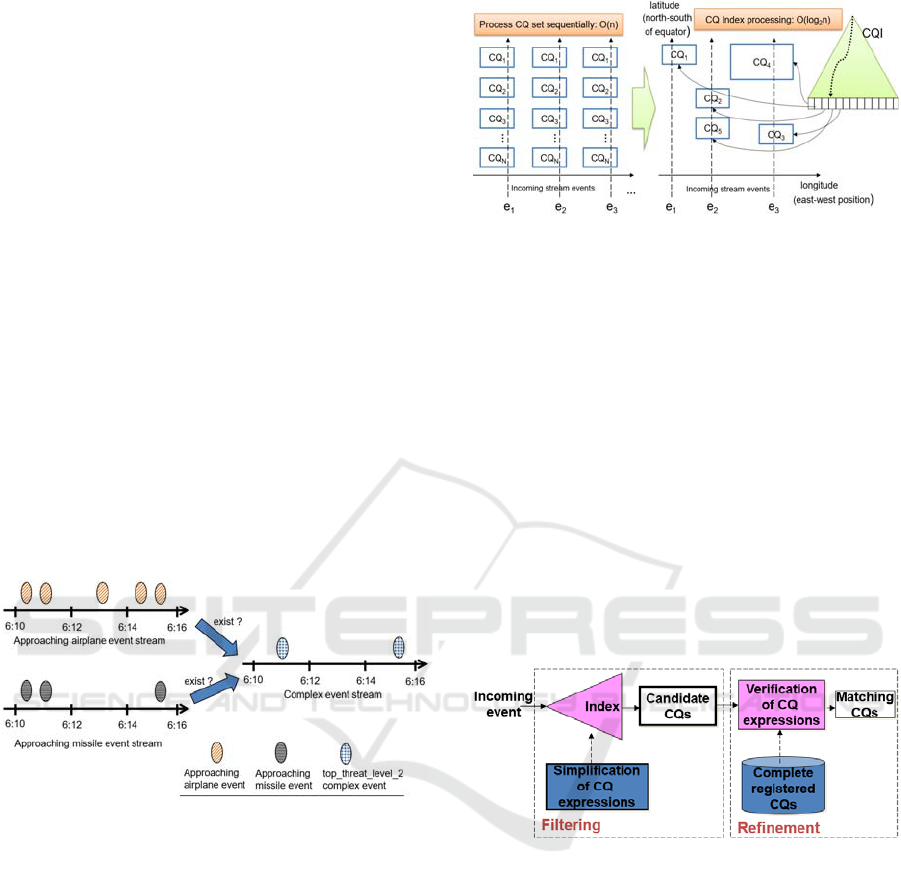
Example: derive complex event top_threat_level_2
if simple events approachingAirplane and
approachingMissile both exist in the last 2 seconds.
Perform the query every 2 seconds (Figure 7).
Figure 7: An example of a complex event query.
IF exist(approachingAirplane)
AND exist(approachingMissile)
FROM approachingAirplane, approachingMissile
WINDOW length=2000ms, trigger=2000ms
THEN top_threat_level_2
4 CQ INDEX
For an incoming event, we need to find out its
matching CQs based on the CQ conditions. Because
only the matching CQs should process the event. We
call the procedure as CQ stabbing (Figure 8).
Figure 8: CQ stabbing for incoming events.
The time complexity is O(n) if we make CQ
stabbing by checking conditions of each CQ one by
one. So we are thinking whether there is a way to get
matching CQs directly based on the field values of the
event and condition values in each CQ. To achieve
that, we use R*-tree as CQ index.
There are three steps to build and use a CQ index
(Figure 9):
Extract values provided by expressions of CQ.
Use the values to build or update the R*-tree
index.
For an incoming event, use its values to search in
the index, and get candidate CQs.
Not all candidate CQs from step 2 match the
event. So next, check their conditions one by one
to find out the final matching CQs.
Figure 9: Filtering and refinement strategy of CQ index.
R*-tree could be a multi-dimensions index. Two
examples are shown in Figure 10. In the first sub-
figure, the index only stores values of two fields in
two dimensions, speed, and elevation. For example, a
CQ whose condition is “30 < speed < 50 & 10 <
elevation < 30” can store in the index. One rectangle
indicates one CQ, while one point in the sub-figure
indicates one incoming event. Therefore, for an
arriving event, to get the candidate CQs, it only needs
to find out all rectangles that contain the point. It is
almost the same if the index is in three dimensions,
which is shown in sub-figure 2 as an example.
COMPLEXIS 2019 - 4th International Conference on Complexity, Future Information Systems and Risk
70
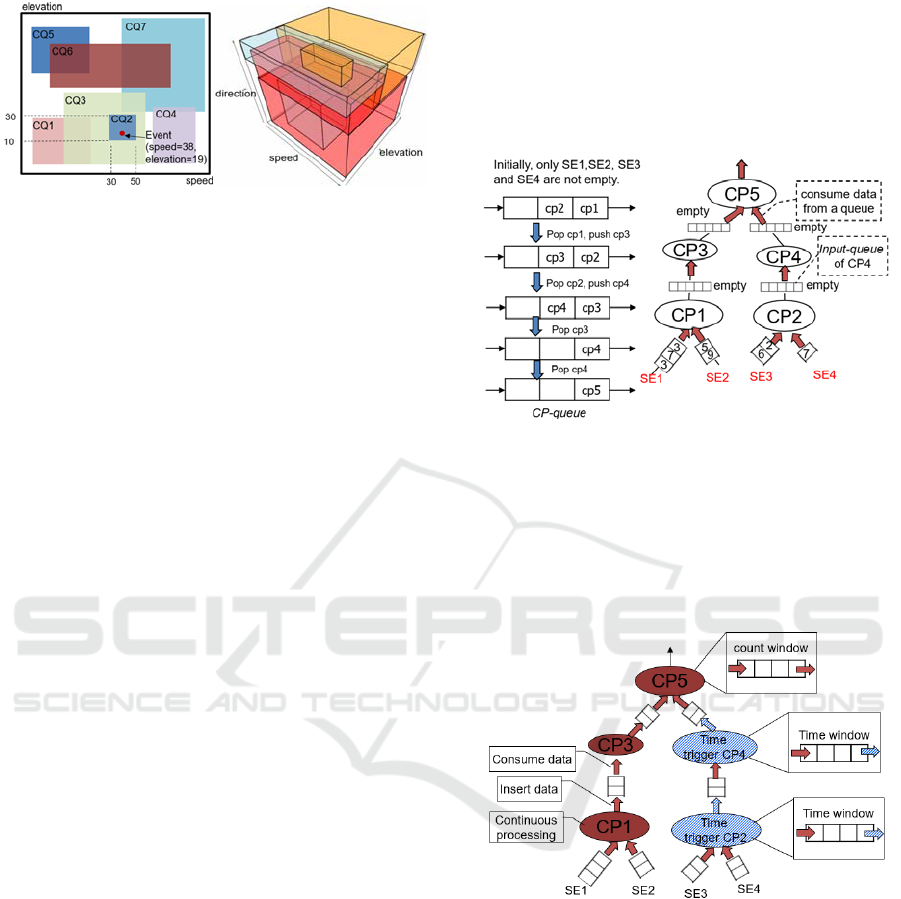
Figure 10: Examples for R*-tree index with (1) two
dimensions, (2) three dimensions.
The data stored in an R*-tree are all points or all
regions. The data type of each dimension in an R*-
tree is the same. However, some predicates in a CQ
condition includes different data types. For example,
the condition “IFF=’enemy’ AND 30<speed<100
AND elevation < 10” includes string and integer two
data types. In such a case, the shapes in the index are
not rectangles or cuboids. It is not suitable to add the
CQ condition to the index directly. We take a strategy
to solve this problem without modifying the
implementation of R*-tree, which is described in the
next section.
5 IMPLEMENTATION FOR
SUPPORTING REAL-TIME
PROCESSING
We have already implemented a prototype system in
C++ program language, running in a single computer
with Windows OS. We use a flexible structure to
organize processing flow among continuous
processing (CP) units. A CP could be a CEP, CQ,
event capture processing or event filtering. Two CPs
connect through a queue (Figure 11). The whole
graph is a directed acyclic graph (DAG).
How to maintain the data in each queue shown in
Figure 11 on the right? Our strategy is consuming the
data in the queues as soon as possible. First, we
maintain a “CP-queue” to store those CPs whose
input streams are not empty. Second, we create a
round-robin scheduler running in a new thread. The
scheduler does two things: one is popping a CP from
the head of the CP-queue, and two is consuming data
from its connecting input queue (called input-queue)
until empty or consuming more than 100 events. If the
input-queue is not empty after popping out more than
100 events, push back the CP to the tail of the CP-
queue, and turn to process another CP. Let us take an
example. In Figure 11, we assume all CPs are
stateless. Initially, only the inputs of CP1 and CP2 are
not empty. So push them to the CP-queue. The round-
robin scheduler pops out CP1, processes it and stores
results in the input-queue that connects to CP3,
causing the input of CP3 becoming not empty. So
push back CP3 to the tail of CP-queue. Next, pop out
CP2 and do the same procedure until the CP-queue
becomes empty.
Figure 11: Implementation of a continuous processing flow.
A CP could be stateless or stateful. If an operation
whose calculation result is affected by history
processed data, it is stateful, such as aggregate
operations Sum and Count. For aggregate operators,
we use a sliding window or tumble window, which is
organized as a data structure queue.
Figure 12: Multi-thread for maintaining data in different
kinds of queues.
Now the question is how to maintain the queue
inside a stateful operation? For a clear explanation,
we focus on the queue of a sliding window or tumble
window. A window is called time window if its length
is based on time, while a window is called count
window if its length is based on event count. In Figure
12, the arrow that is before a queue indicates inserting
data to the queue, while the arrow after a queue
indicates consuming data from the queue. The
components in red color are stateless or contain a
count window. They are processed by the thread of
round-robin scheduler, which is mentioned above in
Real-time Processing of Rule-based Complex Event Queries for Tactical Moving Objects
71
this section. The components in blue color are stateful
and contain time window. They are processed by a
new thread, which is responsible for time trigger,
called time trigger scheduler. The time trigger
scheduler schedules the re-processing time for CPs,
processes it when the time up for each and store
results to the output queues.
In our system, the output results of CP upstream
have high possibility to be used by multiple CPs
downstream. There is an example shown in Figure 13.
If there are many CPs consuming input data from the
same queue, it will have a performance problem to
check conditions of each CP downstream one by one.
We notice that the case shown in Figure 13 is the
same as the one shown in Figure 8. For this case, we
use CQ index to solve the problem, which is to find
out matching CPs directly by using an index, rather
than checking query conditions one by one.
Figure 13: The case to use CQ index.
In section 4, we mentioned that a CQ condition
includes different data types cannot be added to an
R*-tree directly. Our strategy to solve this problem is
to transform the data type of each predicate to be the
same. Also, we transform equation predicates to
interval predicates. For example, an equation
predicate “id=3” can be expressed as “3≤ id ≤3”. Here
is a complete example to transform predicates
“IFF=’enemy’ AND 30<speed<100 AND elevation
< 10” to fit the R*-tree. Firstly, we uniform their data
type to be Integer by using “std::hash<std::string>”
in C++ to calculate the hash value of string “enemy”,
assuming its hash value equals to number 1389.
Secondly, we transform all equation predicates to
interval predicates. Thirdly, make “elevation < 10” to
be “MIN < elevation < 10” (MIN denotes the
minimum integer number). So finally we get the
result that is “1389≤IFF≤1389 AND 30<speed<100
AND MIN < elevation < 10”, which can be added to
an R*-tree.
An incoming event tuple can be expressed as
{“id=3, IFF=enemy, speed=50, elevation=9”} for
example. It indicates a point in the R*-tree. We can
query all regions in the R*-tree that contain the point
by using the function “void
intersectsWithQuery(const IShape& query, IVisitor&
v)” provided by open-source libspatialindex
(libspatialindex, 2019) project.
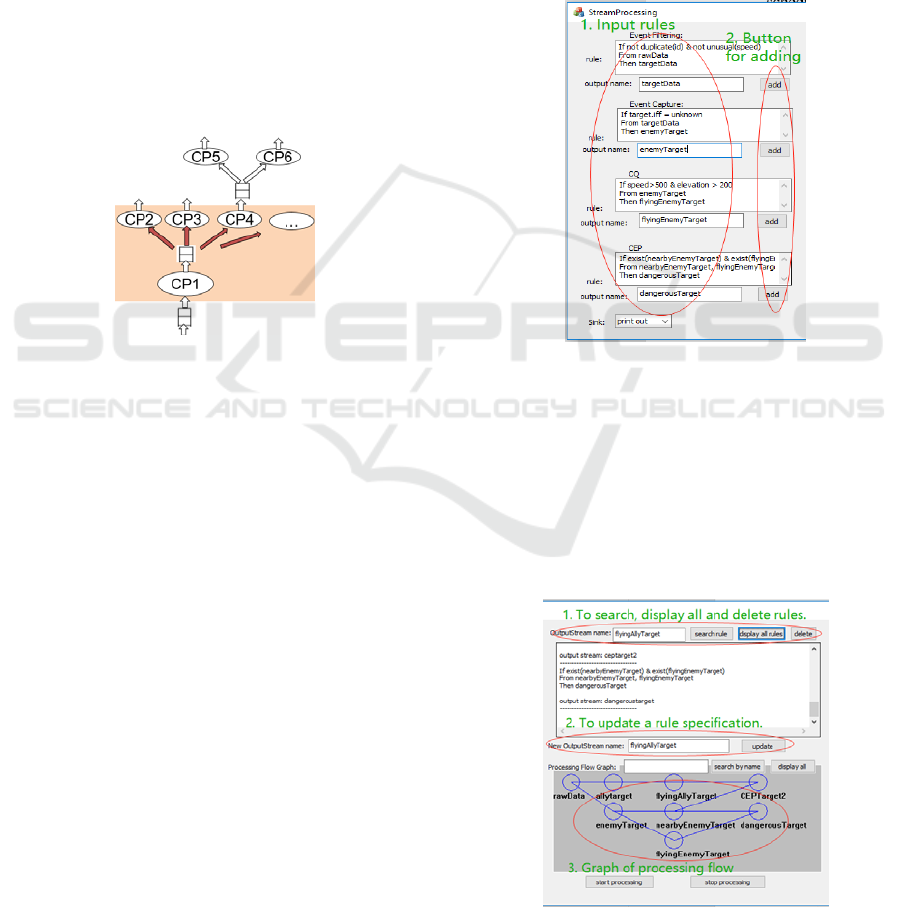
Our prototype system provides GUI for users to
register rule specifications. Users input a rule
specification and click the button “add” to finish the
registration (Figure 14). Our system will create a
graph of processing flow based on input and output
stream names of each rule specification. Users can
display all or search the graph by an output stream
name (Figure 15).
Figure 14: GUI for adding rule specifications.
Our system can insert, search, display, update and
delete rule specifications dynamically. In Figure 15,
we show the GUI components for these
functionalities. By inputting the name of an output
stream, users can search or delete a specified rule
specification. The system starts to work after clicking
the button “start processing”. Figure 16 shows the
way to display processing results.
Figure 15: GUI to search, display, delete and update rule
specifications, and to display processing flow graph.
COMPLEXIS 2019 - 4th International Conference on Complexity, Future Information Systems and Risk
72
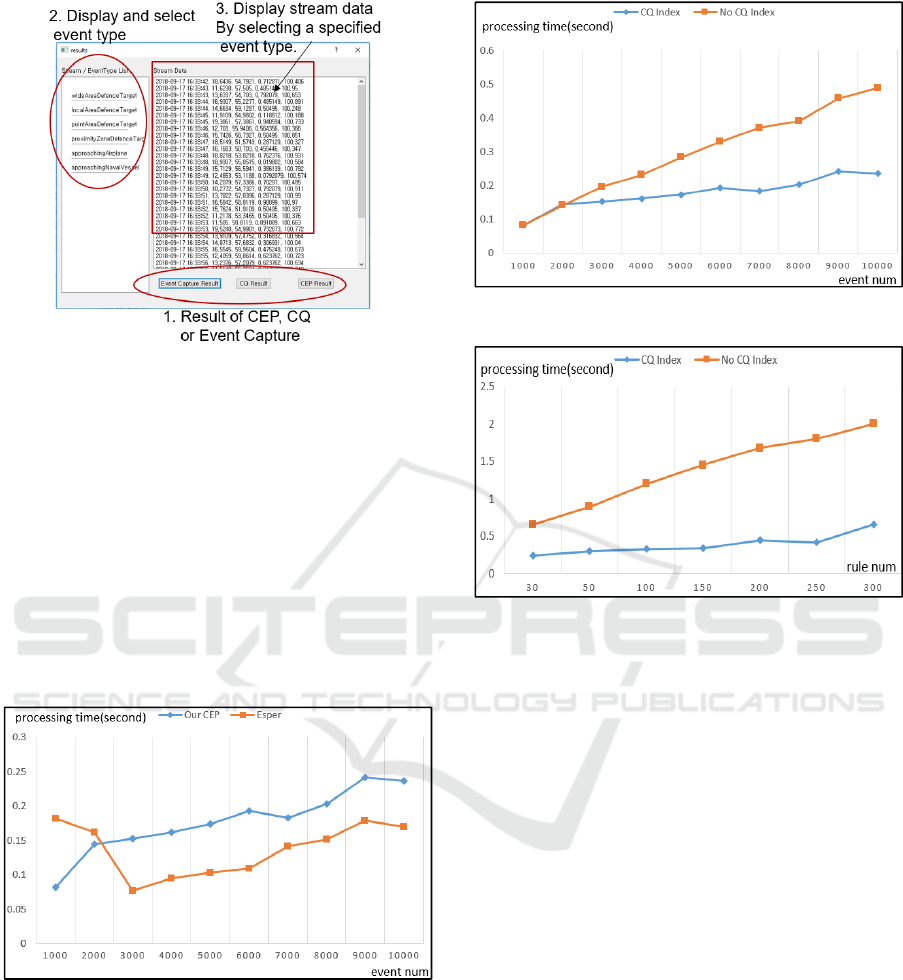
Figure 16: GUI for display stream data.
6 PERFORMANCE
To evaluate the system performance compared with
Esper (EsperTech, 2019), we set up 50 rule
specifications and calculate processing time with
different numbers of input data (Figure 17). To
evaluate the effect of using CQ index, we set up 50
CEP rules and calculate the processing time with and
without using CQ index (Figure 18) and calculate the
time after processing 10,000 events with and without
CQ index (Figure 19).
Figure 17: Set up 50 CEP rules, calculate processing time.
We generate event tuples as input stream data with
randomly assigned values. Attributes of a tuple are id,
time, speed, elevation, IFF, longitude, latitude and so
on. The evaluation result shown in Figure 17 indicates
that the performance of our system is slower than
Esper but not different too much. The evaluation
results in Figure 18 and 19 indicate that the system
has a higher performance by applying CQ index.
Figure 18: Processing time for 50 CEP rules.
Figure 19: Processing time for 10000 events.
7 RELATED WORK
CEP Language: Much research has been carried out
on CEP language and several languages of CEP have
been proposed. The paper (Sadri et al., 2004)
proposed a language SQL-TS, which is an extension
of SQL to express complex sequential patterns in a
database. Paper (Demers et al., 2007) presents query
language Cayuga based on Cayuga Algebra for
naturally expressing complex event patterns. Papers
(Agrawal et al., 2008), (Wu et al., 2006) present the
language SASE and use NFA-based technology to
implement high-performance complex event
processing over streams. Also, CEDR (Barga et al.,
2006) presents the language for temporal stream
modeling. Those languages have common
components. They support Sequencing, Kleene
closure, Negation, Value predicates, Windowing,
Return and so on. The languages could be
implemented with high performance by using NFA-
based technology. The event selection strategy is
Strict or partition contiguity, Skip till next match and
Skip till any match.
Real-time Processing of Rule-based Complex Event Queries for Tactical Moving Objects
73

Optimizing CEP Performance: Paper (Mozafari et
al., 2012) proposes a high-performance approach that
supports CEP on XML streams. It uses XSeq
language to extend XPath with natural operators over
XML streams. The papers (Agrawal et al., 2008),
(Wu et al., 2006) use NFA-based technology to
improve the performance of pattern matching over
streams. Papers (Krishnamurthy et al., 2006), (Yang
et al., 2009) try to improve CEP performance by
making use of sharing among similar queries.
(Johnson et al., 2007) Uses out of order stream data
by maintaining a small state and without complete
stream reconstruction to improve the efficiency of
regular expression matching on streams. Paper
(Schultz et al., 2009) rewrites event patterns in a more
efficient form before translating them into event
automata. The work (Akdere et al., 2008) uses plan-
based techniques to minimize event transmission
costs and can efficiently perform CEP across
distributed event sources.
8 CONCLUSIONS
In this paper, we propose a layered architecture to
decompose a complex event query into four parts,
corresponding four modules of the system. By doing
that, we make the responsibilities of each module
clearer and simply the rule definitions. Besides, it
helps to insert, delete, search rules dynamically. For
each module, we make rule definitions and describe
their format in detail. This paper shows that it is
possible to process various input rules for continuous
processing dynamically in layered specifications. We
use R*-tree as a multi-dimension index to speed up
continuous queries.
ACKNOWLEDGEMENTS
This research is supported by the Agency for Defense
Development (UD160012DD).
REFERENCES
Sadri, R., Zaniolo, C., Zarkesh, A., & Adibi, J. 2004.
Expressing and optimizing sequence queries in database
systems. ACM Transactions on Database Systems
(TODS), 29(2), 282-318.
Barga, Roger S., et al. "Consistent streaming through time:
A vision for event stream processing." arXiv preprint
cs/0612115. 2006.
Demers, Alan J., et al. 2007. "Cayuga: A General Purpose
Event Monitoring System." Cidr. Vol. 7.
Agrawal, Jagrati, et al. 2008. "Efficient pattern matching
over event streams." Proceedings of the 2008 ACM
SIGMOD international conference on Management of
data. ACM.
Wu, Eugene, Yanlei Diao, and Shariq Rizvi. 2006. "High-
performance complex event processing over streams."
Proceedings of the 2006 ACM SIGMOD international
conference on Management of data. ACM.
Mozafari, et al. 2012. "High-performance complex event
processing over XML streams." Proceedings of the
2012 ACM SIGMOD International Conference on
Management of Data. ACM.
Krishnamurthy, Sailesh, Chung Wu, and Michael Franklin.
2006. "On-the-fly sharing for streamed aggregation."
Proceedings of the 2006 ACM SIGMOD international
conference on Management of data. ACM.
Yang, D., Rundensteiner, E.A. and Ward, M.O. 2009. A
shared execution strategy for multiple pattern mining
requests over streaming data. Proceedings of the VLDB
Endowment, 2(1), pp.874-885.
Johnson, Theodore, S. Muthukrishnan, and Irina
Rozenbaum. 2007. "Monitoring regular expressions on
out-of-order streams." Data Engineering, 2007. ICDE
2007. IEEE 23rd International Conference on. IEEE.
Schultz-Møller, Nicholas Poul, Matteo Migliavacca, and
Peter Pietzuch. 2009. "Distributed complex event
processing with query rewriting." Proceedings of the
Third ACM International Conference on Distributed
Event-Based Systems. ACM.
Akdere, Mert, Uǧur Çetintemel, and Nesime Tatbul. 2008.
"Plan-based complex event detection across distributed
sources." Proceedings of the VLDB Endowment 1.1: 66-
77.
EsperTech, Espter. 2019. http://www.espertech.com/esper/
libspatialindex, 2019. https://libspatialindex.org/index.html
COMPLEXIS 2019 - 4th International Conference on Complexity, Future Information Systems and Risk
74
