Autonomous Driving of Commercial Vehicles within
Cordoned Off Terminals
Nathalie Brenner
1
, Andreas Lauber
1
, Carsten Eckert
2
and Eric Sax
1
1
Karlsruhe Institute of Technology (KIT), Institute for Information Processing Technologies (ITIV),
76131 Karlsruhe, Germany
2
HPC Hamburg Port Consulting GmbH, 21129 Hamburg, Germany
Keywords:
Autonomous Vehicles, Commercial Vehicles, Terminal Infrastructure, Ports Traffic Management.
Abstract:
In recent years, the development of autonomous trucks has progressed rapidly. It can be assumed that such
vehicles will be ready within the next decade. In order to make use of the advantages of automated driving
along the entire transport chain, it is necessary to use the autonomous vehicles on public roads as well as on
the terminal areas. The paper presents the extent to which it is possible to adopt autonomously driving trucks
to closed terminal areas. Further it discusses the technical, operational and legal requirements for vehicles,
transport service providers and terminals involved. Based on the requirements a concept for autonomous
driving of commercial vehicles in cordoned off areas is presented. Afterwards this concept is transformed
with the current processes on a fully automated container terminal into a concrete example. This example
shows how autonomous commercial vehicles can be integrated in the operational processes of an existing
terminal.
1 INTRODUCTION
In recent years, the development of Advanced Driver
Assistance Systems (ADAS) has progressed at a rapid
pace. Such vehicles are expected to offer cost savings,
better environmental performance, and higher safety
than conventional trucks. In view of increased compe-
tition and cost pressure in the transport sector, as well
as increased traffic volumes and a simultaneous lack
of qualified drivers, it is important to exploit the op-
portunities arising from the use of autonomous trucks.
At the same time, Automated Guided Vehicles
(AGVs) for container transport within closed terminal
facilities already represent the state of the art and are
used successfully on a growing number of container
terminals worldwide. However, these vehicles are not
suitable for the use on public roads, since they depend
on the infrastructure, consisting of traffic routes and
a guidance system. The autonomous vehicles have
to travel on public roads to a destination or terminal
and transport the goods to the corresponding destina-
tion within the depot. Therefore a clear distinction
between closed off terminals with AGVs and the pub-
lic road with trucks is made (see Figure 1). Therefore
the reaction on the environment is necessary.
Figure 1: Overview of the distinction of automated vehicles
within a port terminal.
In order to use autonomous driving along the en-
tire transport chain, autonomous commercial vehicles
have to be integrated into the operational processes on
a modern container terminal. The transfer of destina-
tion coordinates within the terminal and other infor-
mation requires communication between the vehicles,
infrastructure and transport service provider.
In this paper, Section 2 motivates the use of au-
tonomous commercial vehicles in cordoned-off areas.
Section 3 briefly summarizes the state of the art for
automated vehicles in terminals and on public roads
and subsequently Section 4 presents a concept with
corresponding requirements for the operation of au-
tonomous vehicles in closed-off areas. This concept
will then be transferred in Section 5 to a fully au-
tomated container terminal. Finally, Section 6 con-
cludes with a summary and an outlook on future work.
Brenner, N., Lauber, A., Eckert, C. and Sax, E.
Autonomous Driving of Commercial Vehicles within Cordoned Off Terminals.
DOI: 10.5220/0007747905210527
In Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2019), pages 521-527
ISBN: 978-989-758-374-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
521

2 MOTIVATION FOR
AUTONOMOUS DRIVING
WITHIN TERMINALS
In the case of commercial vehicles in particular, it is to
be expected that new ADAS will offer the possibility
of increasing safety on public roads. It is foreseeable
that technological progress and the adaptation of the
legal framework conditions will make it possible for
autonomous vehicles to travel on public roads within
the next decades (Fagnant and Kockelman, 2015).
In addition, there is a significant influence on
economic efficiency of commercial vehicles (Lauber
et al., 2016). On the one hand, personnel costs are a
big factor when considering total transportation costs,
on the other hand, autonomous vehicles can reduce
rest periods and therefore increase driving times. In
view of a lack of qualified candidates for the driver’s
job, there is almost no alternative but to expand the
sector of autonomous commercial vehicles in order to
guarantee the primary care through freight transport.
Although AGVs are already used in terminals,
they are not suitable for the use on public roads. This
is because of the strong dependence of AGVs on the
infrastructure. They usually have no sensors and act
according to the calculations of a central logic, as de-
scribed in Chapter 3.1. Due to the different condi-
tions on public roads and closed terminals the result-
ing technical and operational solutions are different
for AGVs and autonomous trucks. As the two solu-
tions are not compatible with each other they are spa-
tially separated (see Figure 2). For instance, on the
terminals the containers will be transported by AGVs
from the quay cranes to a container stack.
Within this area the containers are moved by auto-
mated stacking cranes.In order to enable the penetra-
tion of autonomous commercial vehicles the haulage
yards, service areas and terminals along the transport
chain must be prepared for the use of autonomous
vehicles. In addition, the requirements of the vehi-
cles must take into account the special conditions of
a container terminal, for instance the registration and
identification at the entrance of a depot, compared to
public roads.
Therefore, this paper examines the use of au-
tonomously driving trucks on public roads and on cor-
doned off terminals. Further it will examine which
technical, operational, and legal requirements must be
met by the vehicles, the transport service providers,
and terminal infrastructure. The depots and port ter-
minals should be able to use autonomous trucks as
soon as industry is able to produce these. The result
of this study will be a road-map outlining the neces-
sary future development steps. This information can
Figure 2: Physical separation of the areas for manual and
autonomous vehicles and AGVs.
be taken into account in the development process. In
addition, closed-off areas offer the possibility of a test
field, as they do not contradict the current legal situa-
tion.
3 STATE OF THE ART:
DRIVERLESS DRIVING
Autonomous vehicles are build for a movement on
public roads under various conditions. Therefore they
orientate themself within their environment through
built-in sensors. On the other hand, AGVs already
represent the current state of the art on terminals,
without self orientation and build-in sensors. In ad-
dition the current implementation of communication
systems is presented, because both concepts have a
need for a high data transfer rate.
3.1 Automated Guided Vehicles
Automatic vehicles for the transport of containers are
currently used in regular operating sequences at vari-
ous port terminals. For orientation and routing there
are no sensors on board of the AGVs or within the
infrastructure, but only a possibility for position de-
termination (e.g. via transponders or GNSS) and a
communication to a central logical unit (Evers and
Koppers, 1996). Due to the lack of on-board sensors
an obstacle avoidance is not possible with AGVs.
There are two concepts for the implementation of
those facilities. Either it is possible to realize the sys-
tems through central traffic control (CT-control) or
through distributed traffic control (DT-control). In
case of CT-control there is no information process-
ing, neither at the vehicle itself nor within the infras-
tructure (Evers and Koppers, 1996). The central log-
ical unit keeps track of the vehicle’s positions and
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
522

Table 1: Comparision between Automated Guided Vehicles and Autonomous Vehicles.
Automated Guided Vehicle Autonomous Vehicles
CT DT
sensors none short range radar short range radar, long range
radar, optical sensors, lidar, etc
reaction to obstacles no obstacle detection
or reaction
obstacle detection obstacle detection and avoidance
logic centralized server centralized server and
on board
on board
routing centralized server calculation on board
position communication via transmitter dGPS, etc.
communication required not required
movements at all times. The routes are calculated
completely by the control unit and communicated to
the AGVs. Due to the missing sensors on the vehi-
cle, an Automated Guided Vehicle (AGV) realized by
CT-control is not able to detect obstacles. Therefore
this procedure is not suitable for use on public roads.
It is only possible because the AGVs move within a
strictly monitored area without access of pedestrians
and other vehicles and therefore no incalculable ob-
stacles are present.
By using the concept of DT-control the communi-
cation with the AGV is reduced to a minimum. The
vehicles and parts of the infrastructure are equipped
with control units. The communication between the
central unit and the AGV is limited to a suggestion
of a route. The vehicle is equipped with short-range
radar sensors and has to react to its environment for it-
self. However, this reactivity consists of the detection
of objects and braking, but there is no possibility for
obstacle avoidance. After all this option is not suit-
able for use in areas with several automatic vehicles.
The mutual influence complicates the route calcula-
tion of the central unit. Therefore this variant also is
not suitable for simultaneous use on public roads.
All mentioned properties of both concepts,
CT-control and DT-control, are summarized in table 1
for a better overview.
3.2 Autonomous Vehicles
Autonomous vehicles are already being analyzed in
the last decades by many research projects and are
currently being evaluated by many manufacturers.
The feasibility has already been demonstrated in var-
ious demonstrations for individual traffic situations.
For this purpose, the following should be particularly
noted ”Audi Piloted Driving” (Funke et al., 2012)
and ”Mercedes-Benz S500 Intelligent-Drive” (Ziegler
et al., 2014). Both have already demonstrated the
feasibility of autonomous driving using series com-
ponents in urban and rural areas years ago. But
also automotive suppliers like Bosch focusing on au-
tonomous driving within the last decades (Siegle
et al., 1992). In addition specialized companies (e. g.
Tesla (Tian et al., 2018), Waymo (Bresson et al.,
2017)) or data companies like Google (Brown, 2011)
started their work on autonomous driving. These ve-
hicles are based on standard technologies (camera, li-
dar, radar), as they are already used today in trucks
and cars. Processing this information by so-called
sensor fusion permits precise road holding and obsta-
cle avoidance. (Maurer et al., 2016)
Other institutions in particular the Research Cen-
ter for Computer Science focuses on the realiza-
tion and evaluation of novel ADAS. Due to the
development of the CoCar these systems and their
use can be tested under real environmental condi-
tions. (Forschungszentrum Informatik (FZI), 2019)
Table 1 summarizes the mentioned properties and
thus provides an overview of a direct comparison be-
tween AGVs and autonomous vehicles.
Although, at the beginning research has focused
primarily on autonomous passenger cars the advan-
tages of an autonomously driving truck are obvi-
ous. Next to more efficiency, higher safety and net-
working, and therefore a more sustainable transport
chain, economy, society and consumer will benefit
equally (Wiesbaden, 2014). With regard to those
possibilities the field of research of trucks has in-
creased. In 2014 Daimler was able to cover a longer
distance completely autonomously with the ”Future
Truck 2015” (Daimler AG, 2014). The basic idea was
the bundling and linking of all information and func-
tion of current and future assistance systems. Next to
the adaptive cruise control function, Stop-and-go and
Emergency brake systems, also lane keeping was in-
volved (Brockmann and Schlott, 2015). Furthermore
for efficient driving a predictive gearshift program is
used. Predictive Powertrain Control provides infor-
mation about the upcoming road by combining the
navigation system and a three-dimensional map (Ter-
wen et al., 2004). Today the research field of au-
Autonomous Driving of Commercial Vehicles within Cordoned Off Terminals
523

tonomous trucks are in no way inferior to passenger
cars. A further overview is given by additional lit-
erature (Kouchak and Gaffar, 2017). AGVs have
the goal to be guided in a cordoned of terminal and
autonomous trucks have the goal to drive on pub-
lic roads. Bringing both technologies together with-
out changing the specific behaviour of AGVs and the
trucks is focus of this study.
3.3 Communication Standards
In order to take advantage of autonomous vehicles,
traffic telematics systems (Vehicle-to-X (V2X)) en-
able new assistance functions. Automated driving
functions are based on information of the vehicle’s
sensor systems (camera, radar, lidar, etc.). By con-
necting these systems, information between vehicles
can be exchanged. In order to realize a highly effi-
cient data traffic, the infrastructure e.g. traffic lights,
traffic signs and cameras on intersections are con-
nected to the systems as well. For V2X communi-
cation, the standards IEEE 802.11p and SAE J2735
have to be supported. However, V2X is not suitable
to transmit large amounts of data due to the low band-
width (DSRC (Dedicated Short Range Communica-
tion) Tech Cmte, 2016) and the limited range of 1 km.
Moreover, communication with vehicles is im-
portant for fleet management of logistics operators.
Existing standards such as SAE J1939 and the fleet
management system (FMS) are important factors.
This standardized interface enables the installation
of customer-specific systems into any vehicle. The
transmission of the data to the back-end server is
set up via the mobile network (GSM, UMTS, GPRS,
LTE, 5G) to connect vehicles at great distances.
4 CONCEPT FOR AUTONOMOUS
COMMERCIAL VEHICLES IN
RESTRICTED AREAS
As described in Section 3, various solutions have been
established for the applications public road and cor-
doned off terminals. Each adapted to the respective
requirements and boundary conditions, but are not
compatible with each other. For example, the termi-
nal’s IT system is presently not capable of integrating
autonomous vehicles as currently developed. More-
over AGVs are unable to drive on public roads.
In order to allow autonomous driving on roads and
terminals with the same vehicles, the approach of au-
tonomous vehicles appears to be more suitable. The
main reasons are safety, the structural complexity of
the infrastructure and the variety sensors installed in
autonomous road vehicles. Therefore, we focus our
work on the examination of how port terminals can be
prepared for the future use of autonomous trucks. In
addition to the boundary conditions, the legal aspects
have to be considered for setting the concept.
4.1 Technical Requirements
The basic technical realization of autonomous driv-
ing of cars and commercial vehicles has already been
proven as described in Section 3. Due to the different
challenges and boundaries the technical requirements
will be divided into three areas (vehicle, infrastructure
and communication).
4.1.1 Qualification Profile for Autonomous
Vehicles
Any external influences must be taken into account
in order to guarantee 24h/7 operation. Those influ-
ence occur as weather conditions, differences in in-
cidence of light, but also as failure of system units
in the infrastructure. Therefore redundancies with re-
gard to the selection of sensors and passive fallback
levels are required for permanent operation. The ac-
quisition of environmental data has to take place with
radar sensors and cameras. In addition, traffic signs
and changes in the environment must be taken into ac-
count. Therefore the longitudinal and lateral dynam-
ics have to be controlled by the autonomous vehicle.
Due to autonomous vehicles are already being ana-
lyzed by many manufactures, these requirements are
considered to be given along with all other assistance
systems.
In contrast to the previously mentioned claims,
there are requirements specially for the purpose of
driving on terminals with operational sequences. One
example is the vehicles availability to communicate
with the Terminal Operating System (TOS) in order
to report that the vehicle has reached a container han-
dover position and is waiting for the landing of the
container. Another one is the possibility to un- and
lock the ”twist locks” for securing the container on
the truck bed. Next to the vehicle, these requirements
are also valid to the infrastructure.
4.1.2 Infrastructural Requirements
Due to permission requirements to access the termi-
nal, the identification of the truck is essential. This
can either be achieved by using cameras at the park-
ing spaces and at the terminal’s entry or via sending
and receiving an ID.
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
524

This recognition is also crucial during loading and
unloading of the trucks. On the one hand the position
of the truck during the loading process has to be mon-
itored. On the other hand, it is necessary to check
whether the vehicle belongs together with the load
and the loads documents. With regard to the load-
ing process and its verification, additional attention
should be paid to a high efficiency. The high through-
put and the crane position should be taken into ac-
count to reduce time losses caused by manoeuvring
the vehicles.
The position of the parking space has to be com-
municated in order to reach the assigned parking po-
sition by the truck. This could be achieved by trans-
mitting the GPS data or by route guidance through the
infrastructure. Since the truck is designed for driving
on public roads it is crucial that the infrastructure is
adapted to the road traffic regulations. The given path
to the final parking position may therefore be marked
only by light signals and traffic signs. This saves fur-
ther demands on additional functions for routing in
the autonomous truck.
4.1.3 Communication Requirements
Communication takes place between all three parties,
truck, terminal and operator. The communication be-
tween truck and terminal is limited to slot planning
and parking position assignment. All further informa-
tion is communicated to the truck by its forwarding
company. The forwarding company communicated
with the terminal operator.
For exchanging of loading information from the
terminal to the forwarding company a high bandwidth
is required. Further the forwarding company have to
communicate with the autonomous vehicles, which
needs a long range communication. In order to in-
crease the range and bandwidth of the communica-
tion the mobile standards LTE and 5G should be sup-
ported.
4.2 Legal Aspects
In Europe, the Vienna Convention on Road Traffic im-
poses a severe restriction on autonomous driving on
public roads. It states that a driver must be respon-
sible for the dynamic behavior of the vehicle at all
times. In contrast depots and port terminals are cor-
doned off areas are private property. Therefore, field
tests for autonomous driving are moved to these areas.
The vehicles comply to general traffic regulations in
public road transport, such as light and traffic sights
or lane guidance. Furthermore no unforeseen situa-
tions, e.g. playing children or other pedestrians, are
expected. Thus, cordoned off areas offer the possi-
bility to investigate technical and operational require-
ments without having to deal with the current legal
obstacles.
Commercial vehicles have to find their way inde-
pendently within port terminals. In addition to self-
driving, this also includes finding the allocated park-
ing space and final parking action. This makes it suit-
able for testing mostly functions without violating the
legal framework.
5 EXAMPLE TERMINAL
The concept for the integration of autonomous com-
mercial vehicles has been presented. Within the scope
of the study, the project will be applied to a fully auto-
mated container terminal in Hamburg (Germany) for
the validation. This will be described in the following
section.
5.1 Current Operating Sequence
Today, a truck is steered through the terminal by a
driver which receives directions from the TOS. This
guides the truck through the terminal. Among other
information, they contain the control lanes, the trans-
fer position or the customs control zone.
Once the truck reached the assigned parking po-
sition at the container storage area the driver has to
prepare the trailer and finally report its readiness for
container handover. During the handover the drive
has to monitor the operation and instantly report any
irregularities to the crane operator. After the container
handover the driver has to prepare the truck for driv-
ing on public road. This includes setting of the twist
locks to secure the container on the trailer bed. Fig-
ure 3 shows exemplary the different locations on a
typical container terminal with a short description and
the tasks of the driver at those locations.
In case the container is not lifted from the trailer,
but the trailer remains at the terminal the driver has
to operate the trailer legs. Before leaving the terminal
with a new picked up trailer the driver has to perform
a quick check of the trailer’s road-worthiness.
Although in most modern container terminals
fright documents are already handled electronically,
sometimes the driver has to deliver and fetch certain
documents.
5.2 Planned Operating Sequence
Obviously, the operating sequence for an autonomous
truck differs from the current operation sequence.
Autonomous Driving of Commercial Vehicles within Cordoned Off Terminals
525
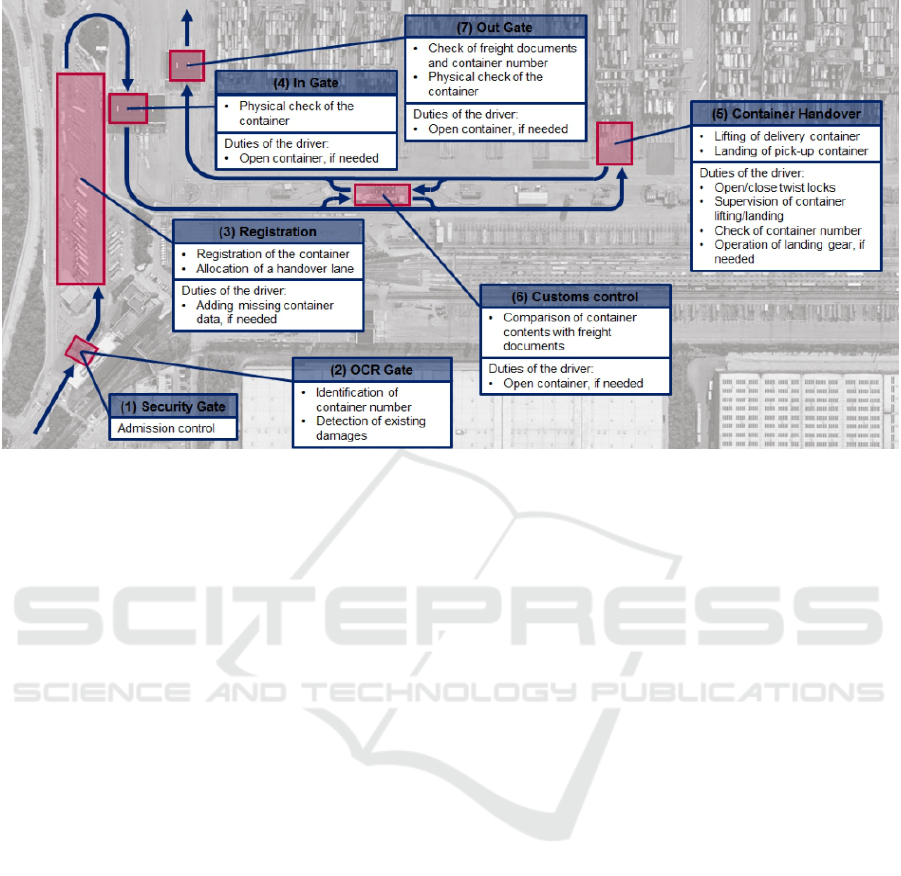
Figure 3: Locations on a container terminal a truck has to call at and the tasks the driver has to perform at those locations.
This is mainly due to the absence of the driver. As
a result, all communication with the truck (driving di-
rections, position reports, documents, etc.) has to be
done electronically. Since the trucks are build by dif-
ferent manufacturers and forwarding company vary
with their telematic system, an common interface sup-
porting all communication is not suitable. Therefore
only the forwarding company should communicate
with the truck (e. g. route of the truck) and infor-
mation should be send from the TOS company by a
defined communication protocol.
As there is no communication between the truck
and the infrastructure, the infrastructure and the ter-
minal operator form a closed system. The au-
tonomous trucks receives the loading and route infor-
mation from the TOS via its forwarding company and
enters the terminal after successful identification. The
intended parking position has to be communicated,
e.g. by GPS data. From now on the infrastructure
only guides the vehicles via public traffic signs and
light signals. After reaching the parking position, the
crane operator has to be informed of the readiness for
loading, for example via the hazard warning light.
To reach the final parking position the self-driving
of the truck is sufficient, but in addition to the ac-
tual steering, currently the driver also performs fur-
ther manual tasks as described in Section 5.1. These
tasks must either be automated or performed by the
terminal personnel. In the first case the automation of
supervision of container handover and securing twist
locks at the trailer can be done using sensors and
robotics. However, the economic and legal implica-
tions have to be analyzed in both cases. The driver
is currently responsible for securing the load on the
bed or opening the trailer for customs, which is then
transferred to the terminal operator (including liabil-
ity). After leaving the terminal the truck drives on
public road, as mentioned in the state of the art in Sec-
tion 3, to the customer depot or other terminals.
In order to guarantee a seamless transition from
manual operation to a fully automatic container termi-
nal, the study focuses a step-by-step approach of au-
tomation. Therefore all processes on the terminal has
to be prepared for an automatic operation, but also for
manual operation. This could be achieved by a spatial
separation of the handover positions for both kinds of
trucks.
6 CONCLUSION
In this paper, a motivation for the advancement of the
research for the combination of autonomous commer-
cial vehicles and automated terminals has taken place.
Therefore the state of the art in autonomous and auto-
matic vehicles was presented. Since AGVs will not be
able to move on public roads, the terminals will have
to be prepared for autonomous vehicles as they cur-
rently being researched by many manufacturers. For
realization, a concept was first presented and subse-
quently the associated requirement were listed. In ad-
dition to the technical demands for the vehicle, the
infrastructure and the communication, the legal as-
pect was addressed too. Finally the concept was ap-
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
526

plied to a fully automated container terminal for vali-
dation. For this reason the current operating sequence
was presented and extended to include the planned se-
quence.
Further steps within this study is a gap analy-
sis. The project investigates the extent to which it is
possible to use autonomously driving trucks on pub-
lic roads and simultaneously on closed terminal ar-
eas. Therefore the technical, operational and legal
requirements are examined. In addition to the pre-
sented demands for the vehicle, the requirements to
be met by the transport service providers and the ter-
minals are considered. In the further steps of the study
a detailed road map including requirements for au-
tonomous driving in terminals, the feasibility of the
concept and the saving potentials will be investigated.
ACKNOWLEDGEMENTS
This work has been funded by German Federal
Ministry of Transport and Digital Infrastructure
(BMVI) in the study INTERACt (funding number:
19H18005B)
REFERENCES
Bresson, G., Alsayed, Z., Yu, L., and Glaser, S. (2017). Si-
multaneous Localization and Mapping: A Survey of
Current Trends in Autonomous Driving. IEEE Trans-
actions on Intelligent Vehicles, 2(3):194–220.
Brockmann, S. and Schlott, S. (2015). Der weite weg zum
autonomen lkw-fahren. ATZ-Automobiltechnische
Zeitschrift, 117(1):8–13.
Brown, A. S. (2011). Hiding in Plain Sight: Google’s au-
tonomous car applies lessons learned from driverless
races. Mechanical Engineering, 133(02):31.
Daimler AG (2014). Future Truck 2025 - Weltpremiere f
¨
ur
den Transport der Zukunft.
DSRC (Dedicated Short Range Communication) Tech
Cmte (2016). Dedicated short range communications
(dsrc) message set dictionary
TM
.
Evers, J. J. and Koppers, S. A. (1996). Automated
guided vehicle traffic control at a container terminal.
Transportation Research Part A: Policy and Practice,
30(1):21 – 34.
Fagnant, D. J. and Kockelman, K. (2015). Preparing a
nation for autonomous vehicles: opportunities, barri-
ers and policy recommendations. Transportation Re-
search Part A: Policy and Practice, 77:167–181.
Forschungszentrum Informatik (FZI) (2019).
Cocar - the instrumented cognitive car.
http://www.fzi.de/project/cocar/.
Funke, J., Theodosis, P., Hindiyeh, R., Stanek, G., Kri-
tatakirana, K., Gerdes, C., Langer, D., Hernandez, M.,
Muller-Bessler, B., and Huhnke, B. (2012). Up to the
limits: Autonomous Audi TTS. In IEEE Intelligent
Vehicles Symposium (IV), 2012, pages 541–547, Pis-
cataway, NJ. IEEE.
Kouchak, S. M. and Gaffar, A. (2017). Determin-
ism in future cars: Why autonomous trucks are
easier to design. In 2017 IEEE SmartWorld,
Ubiquitous Intelligence Computing, Advanced
Trusted Computed, Scalable Computing Commu-
nications, Cloud Big Data Computing, Internet
of People and Smart City Innovation (Smart-
World/SCALCOM/UIC/ATC/CBDCom/IOP/SCI),
pages 1–6.
Lauber, A., Glock, T., Sax, E., and Wiedemann, M. (2016).
Analyzation and evaluation of vehicle and infrastruc-
ture for autonomous driving on public transportation
depots. In K. Berns, K. Dreßler, P. Fleischmann, R.
Ilsen, B. J
¨
org, R. Kalmar, T. Nagel, C. Schindler, and
N. K. Stephan, editor, Commercial Vehicle Technol-
ogy, pages 3–12, Achen. Shaker Verlag.
Maurer, M., Gerdes, J. C., Lenz, B., and Winner, H. (2016).
Autonomous Driving: Technical, Legal and Social As-
pects. Springer Berlin Heidelberg, Berlin, Heidelberg.
Siegle, G., Geisler, J., Laubenstein, F., Nagel, H.-H., and
Struck, G. (1992). Autonomous driving on a road net-
work. In IEEE Intelligent Vehicles, 1992, pages 403–
408, Piscataway. IEEE.
Terwen, S., Back, M., and Krebs, V. (2004). Predictive pow-
ertrain control for heavy duty trucks. IFAC Proceed-
ings Volumes, 37(22):105–110.
Tian, Y., Pei, K., Jana, S., and Ray, B. (2018). DeepTest:
automated testing of deep-neural-network-driven au-
tonomous cars. In 2018 ACM/IEEE 40th International
Conference on Software Engineering, Piscataway, NJ.
IEEE.
Wiesbaden, S. F. (2014). Die zukunft hat bereits begonnen.
ATZ-Automobiltechnische Zeitschrift, 116(9):18–21.
Ziegler, J., Bender, P., Schreiber, M., Lategahn, H., Strauss,
T., Stiller, C., Dang, T., Franke, U., Appenrodt, N.,
Keller, C. G., Kaus, E., Herrtwich, R. G., Rabe, C.,
Pfeiffer, D., Lindner, F., Stein, F., Erbs, F., Enzweiler,
M., Knoppel, C., Hipp, J., Haueis, M., Trepte, M.,
Brenk, C., Tamke, A., Ghanaat, M., Braun, M., Joos,
A., Fritz, H., Mock, H., Hein, M., and Zeeb, E. (2014).
Making Bertha Drive—An Autonomous Journey on a
Historic Route. IEEE Intelligent Transportation Sys-
tems Magazine, 6(2):8–20.
Autonomous Driving of Commercial Vehicles within Cordoned Off Terminals
527
