
A Framework for Personalised HMI Interaction in ADAS Systems
Yannis Lilis
1
, Emmanouil Zidianakis
1
, Nikolaos Partarakis
1
, Stavroula Ntoa
1
and Constantine Stephanidis
1,2
1
Institute of Computer Science, FORTH, N. Plastira 100 Vassilika Vouton, GR-700 13, Heraklion, Crete, Greece
2
Department of Computer Science, University of Crete, Voutes Campus GR-700 13 Heraklion, Crete, Greece
Keywords:
ADAS Systems, Personalisation, Adaptation, Human Machine Interaction.
Abstract:
Personalisation features of Advanced Driver Assistant Systems (ADAS) can improve safety and driving expe-
rience. However, they are typically developed in an ad-hoc, application-specific and vehicle-specific manner,
resulting in tightly coupled implementations that are difficult to extend, while disallowing reuse of person-
alisation code or even personalisation logic across different setups. In this context, this paper proposes a
framework for supporting personalised HMI interaction in ADAS systems, developed in the context of the
H2020 ADAS&ME project. The framework is based on a rule engine that uses a customisable and extensible
set of personalisation and adaptation rules, provided by automotive domain and HMI experts, and evaluates
them according to the driver, vehicle and environment to produce HMI activation and GUI personalisation
and adaptation decisions. Personalised HMI modality selection is realised by taking into account all available
input and output modalities of the vehicle and maintaining bindings for their activation. At the same time, GUI
personalisation is handled automatically through a GUI toolkit of personalisable and adaptable user controls
that can be used for developing any GUI application requiring personalisation features. The paper presents the
design and development of the framework and validates it by deploying it in two case studies.
1 INTRODUCTION
Within the automotive domain, research efforts have
recently focused on improving driving safety through
the development of preventive support systems, such
as adaptive cruise control, automatic emergency brak-
ing, lane keeping assist, collectively referred to as Ad-
vanced Driver Assistance Systems (ADAS).
To achieve their goal, ADAS systems utilise a va-
riety of Human-Machine Interaction (HMI) elements
for interacting with the driver. In this context, a
prominent direction for further improving safety and
the overall driving experience is to offer personalised
and adaptive interaction (Mueller, 2014), taking into
account aspects of the driver, the vehicle and the envi-
ronment to deliver custom tailored interaction through
intelligent decision making. For example, an ADAS
system may take into account the driver’s distraction
or lack of experience to trigger proactive actions ear-
lier. Also, the methods for informing the driver about
an upcoming road condition may depend on driving
context or environmental conditions. For example, in
case of bad lighting conditions (e.g., sunlight), an au-
ditory message would be preferred over a visual one.
A lot of research has focused in the field of
HMI personalisation in the context of ADAS sys-
tems (Amditis et al. 2001; Recarte and Nunes 2003;
H
´
el
´
ene et al. 2005; Hassel and Hagen 2006; Brouwer
et al. 2009; Fischer and N
¨
urnberger 2010, Garzon
and Poguntke 2011; Garzon 2012). However, in most
cases the personalisation features are deployed in an
ad-hoc manner, focusing on specific applications and
vehicle setups. This means that incorporating addi-
tional HMI personalisation would require significant
effort, leading to a system that is difficult to extend.
From a software engineering perspective, ad-hoc so-
lutions also result in tightly coupled implementations
where personalisation code is mixed with application
logic code, hindering maintainability and disallowing
reuse of personalisation code or even domain person-
alisation logic across different setups.
This paper argues that a comprehensive solution
capable of delivering personalisation without being
bound on specific setups or particular HMI elements
would reduce the extra effort required for realising
personalisation, thus greatly improving the adoption
of HMI personalisation within ADAS systems. In this
context, this paper proposes a framework for support-
ing personalised HMI interaction in ADAS systems.
The framework is based on a rule engine that uses
586
Lilis, Y., Zidianakis, E., Partarakis, N., Ntoa, S. and Stephanidis, C.
A Framework for Personalised HMI Interaction in ADAS Systems.
DOI: 10.5220/0007801505860593
In Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2019), pages 586-593
ISBN: 978-989-758-374-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

a customisable and extensible set of personalisation
and adaptation rules, provided by automotive domain
and HMI experts, and evaluates them according to the
current driver, vehicle and environment parameters to
produce HMI activation and GUI personalisation and
adaptation decisions. Personalised HMI modality se-
lection is realised by taking into account all available
input and output modalities of the vehicle and main-
taining bindings for their activation. GUI personalisa-
tion is handled automatically through a GUI toolkit of
personalisable and adaptable user controls that can be
used for the development of any GUI application re-
quiring personalisation features. The paper discusses
the design and development of the framework and val-
idates it by deploying it in two case studies.
2 BACKGROUND AND RELATED
WORK
2.1 ADAS Systems and HMI Elements
ADAS are technologies used to make motor vehi-
cle travel safer by automating, improving or adapt-
ing some or all of the tasks involved in operating a
vehicle (Craig, 2012). The aim of ADAS systems is
to reduce risk exposures by notifying the driver about
potential problems, or automating some tasks to re-
lieve a driver from manual control of a vehicle. To this
end, ADAS systems provide technologies that moni-
tor the driver state, alert drivers about potential col-
lisions or accidents, implement safeguards and take
over control of the vehicle to improve the safety of
the driver and the passengers (Tigadi et al., 2016). To
deliver such functionality, ADAS systems use input
from multiple sensor sources such as ultrasound, au-
tomotive imaging, LiDAR, radar and cameras used
for image processing by computer vision algorithms
(Lu et al., 2005), as well as radio and satellite com-
munications for vehicle-to-infrastructure or vehicle-
to-vehicle monitoring (Piao and McDonald, 2008).
HMI elements are essential for ADAS systems
as they serve both as a communication bridge be-
tween the vehicle and the driver and as a mean for
the driver to access information and services provided
via the vehicle-to-vehicle or vehicle-to-infrastructure
communication. The efficacy of ADAS technologies
for driver safety relies on the provision of distraction-
free methods for driver-vehicle interaction, with mul-
tiple OEMs having already adopted the design and de-
ployment of HMI elements in this direction.
ADAS information exchange is mostly supported
by touch input devices as well as visual and audi-
tory forms. Alternative input and output modalities
have also been considered, for instance, HMI input
may be provided through analysis of implicit gestures
and poses. Touch-free HMI elements support inter-
action without requiring drivers to move their hands
from the steering wheel. On the other hand, HMI out-
put is provided explicitly through visual, acoustic and
haptic modalities, as well as implicitly using ambient
light, background sound and smooth force feedback
on the steering wheel, pedals or handle bars. Visual
feedback is provided by displays, like clusters on the
dashboard, but also through head-up displays (HUDs)
projecting information on a screen on the windscreen
of the car in the driver sight direction, maintaining
their focus on the road (Tonnis et al., 2007). Acoustic
feedback can also be used for safe notifications, as au-
dible warnings are more effective than visual ones in
case of urgent situations since they induce a quicker
reaction. Finally, haptic interaction is typically used
on the steering wheel or on the seat and can be less
annoying than auditory (Lee et al., 2004).
2.2 Personalised Interaction with HMI
Elements in Automotive
Applications
The evolution of HMI technologies and the increas-
ing amount of information in the automotive domain
has introduced new layers of interaction complexity.
Initially, HMI elements were limited only to the pri-
mary commands devoted for driving. With the mas-
sive introduction of ADAS systems and the emer-
gence of multi-modal HMIs, drivers encounter an in-
creasing information flow. However, drivers are not
always capable of perceiving and understanding the
plethora of messages due to their physiological state
(i.e., tired) and complex traffic environment (H
´
el
´
ene
et al., 2005). As a result, HMI technologies need
to be context aware in terms of driver, vehicle and
environmental state as well as be personalised and
adapted to user’s characteristics, needs and expecta-
tions. There are two main applications for personali-
sation: HMI element personalisation and personalisa-
tion of driver assistance systems. A third application
area in hybrid electric vehicles is the prediction of the
driving range. Research studies mainly focus on the
infotainment area for personalisation of the HMI el-
ements. For example, (Garzon and Poguntke, 2011)
present an in-car-entertainment system that automati-
cally adapts to the personal needs of the driver. Var-
ious efforts have been made to increase driver’s per-
formance and satisfaction through personalised HMI
technologies. For instance, (Hassel and Hagen, 2006)
proposed a method to build a dialogue system in an
A Framework for Personalised HMI Interaction in ADAS Systems
587
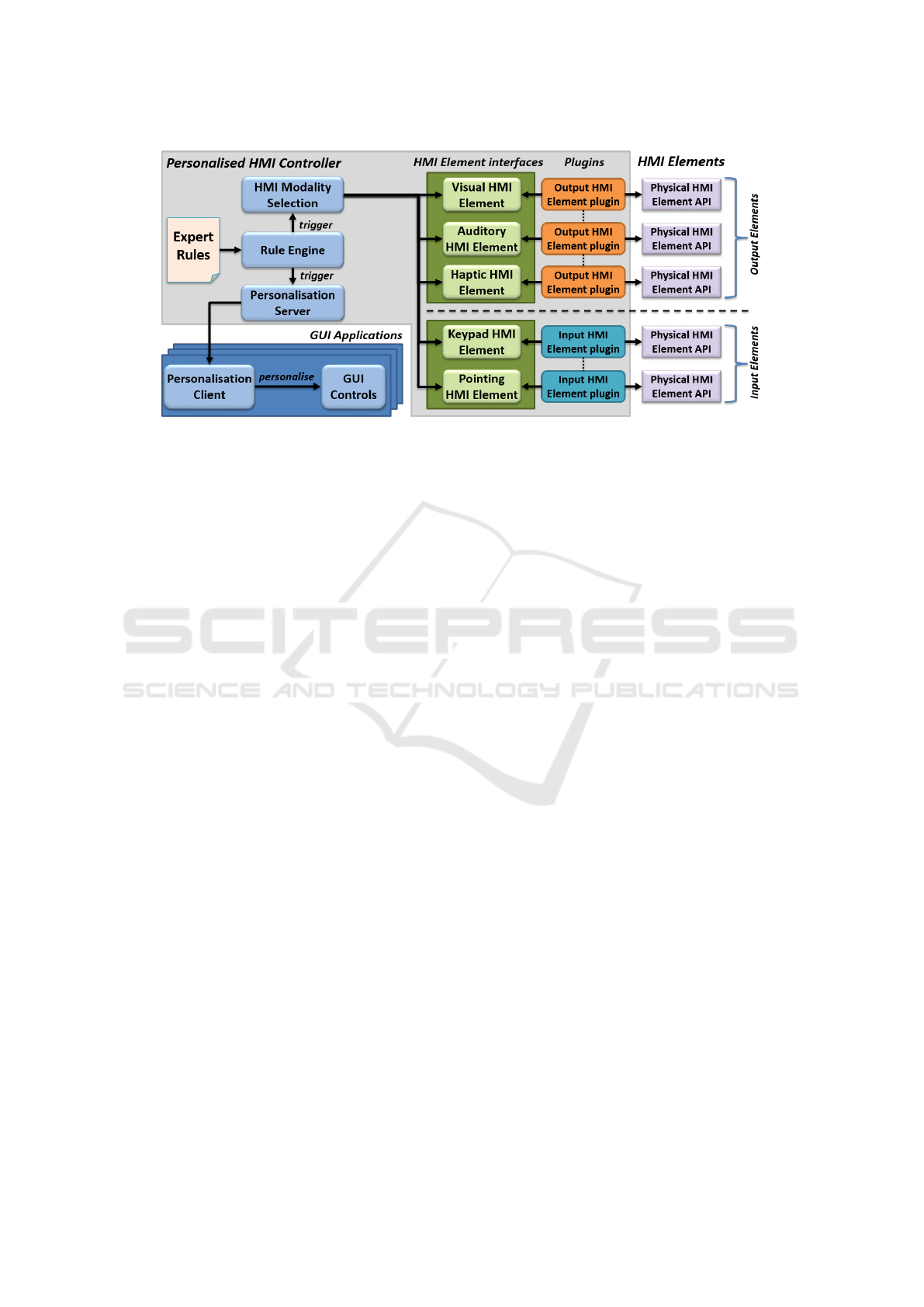
Figure 1: High-level architecture of the personalised HMI framework.
automotive environment that automatically adapts to
the user’s experience with the system. Another exam-
ple of personalised interaction with in-car information
systems is COMUNICAR (Amditis et al., 2001). It
aimed to develop an integrated, in-vehicle multime-
dia HMI able to harmonize the messages coming from
the ADAS systems, the telematics services, and the
entertainment functions. Similarly, the AIDE project
(Brouwer et al., 2009) investigated the integration of
different ADAS systems and in-vehicle information
systems that take into account the driver and the traf-
fic conditions to adapt presented information.
(Garzon, 2012) introduces two approaches to sim-
plify the execution of a preferred entertainment fea-
ture by personalising a list of context-dependent
shortcuts or by automatically executing regularly used
features. The myCOMAND case study explores an
interactive user interface (UI) that provides access to
various information items aggregated from Web ser-
vices (Fischer and N
¨
urnberger, 2010). It was created
to gain insights into applicability of personalisation
and recommendation approaches for the visual rank-
ing and grouping of items using interactive UI layout
components (e.g., carousels, lists). Mercedes-Benz
User Experience offers an intuitive operating experi-
ence that learns user preferences via artificial intelli-
gence (Werner, 2018). The system also includes intel-
ligent voice control with natural speech recognition.
The domain of navigation systems is also impor-
tant, as they are complex, with many functions, and in
some cases coexisting with infotainment systems of a
car and other components. According to (Recarte and
Nunes, 2008), during stressful situations, the HMI of
the driver navigation system can be made adaptive to
reduce the mental workload of the driver, depending
on the driver’s characteristics.
3 PERSONALISED HMI
FRAMEWORK
The Personalised HMI framework (Figure 1) is an ex-
pert system that applies rule-based reasoning to pro-
duce the personalisation and adaptation decisions for
selecting and activating the most appropriate HMI el-
ements and personalising GUI applications based on
the driver profile, current state, driving context and
environmental situation. The framework operates in
a distributed environment, with the Personalised HMI
Controller acting as a server and the HMI modalities
and GUI applications acting as clients. It is part of an
HMI framework developed in the ADAS&ME project
(Knauss et al., 2018). To provide the necessary con-
text, important ADAS&ME components and their in-
teraction with the personalised HMI framework are
presented before elaborating on the framework itself.
3.1 Components and Interaction
Apart from the Personalised HMI framework, other
important components include the Personalisation
System, the Driver Monitoring, the Environmental
Monitoring and the Decision Support System (DSS).
The Personalisation System provides information
about the driver (e.g., characteristics, preferences),
while the Driver and Environmental Monitoring com-
ponents provide information about the current driver
state and environment. All this information is organ-
ised in a comprehensive ontology (Lilis et al., 2017)
and constitutes the input parameters used for express-
ing the personalisation and adaptation logic.
The DSS acts as the ”brain” of the vehicle and
decides the appropriate interaction or transition strat-
egy based on the situation, thus initiating interaction
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
588

with the driver. In particular, the DSS decides to in-
form, notify or alert the driver as well as request han-
dovers or trigger automation functions when neces-
sary. Interaction strategies involving HMI modalities
are realised through the personalised HMI framework
so as to support personalised interaction. Activation
of automated functions similarly passes through the
personalised HMI framework to be presented to the
driver in a personalised manner.
3.2 HMI Modality Selection
Based on the vehicle HMI elements, the available
input devices, either explicit (e.g., touch, gestures,
speech, dashboard controls) or implicit (gaze/head
tracking, physiological parameters) should be con-
sidered for choosing the best input method. Simi-
larly, the available output devices (e.g., touch screens,
speakers, vibration motors, AR displays) and their re-
spective modality types (i.e. auditory, haptic, and vi-
sual) should be considered for choosing the best out-
put method. To achieve this functionality, the person-
alised HMI framework classifies modalities into cate-
gories and supports multimodality.
3.2.1 Output Modalities
Output HMI elements are classified in three cate-
gories: visual, auditory and haptic. The proposed
framework features corresponding HMI element in-
terfaces so as to manage and access physical HMI el-
ements installed in the vehicle in a uniform, device-
independent manner. For each physical HMI element,
an HMI element plugin is developed to wrap its low-
level API to the appropriate HMI element interface.
These plugins are instantiated upon system start-up
based on configuration that matches the HMI element
setup of the vehicle, and then registered to an HMI
element holder. Through the HMI output element in-
terfaces, the HMI elements of the vehicle can be trig-
gered, activated or deactivated, while it is also pos-
sible to query for their status and capabilities. The
HMI element status can be used to detect failing HMI
elements so as to select alternative interaction modal-
ities. HMI element capabilities can also be taken into
account in specifying the adaptation and personalisa-
tion logic. For example, to visualize a notification
message with a lot of content, the system would take
into account the screen size of each visual HMI ele-
ment and possibly opt for a big display.
3.2.2 Input Modalities
Input HMI modalities are categorised in keypad and
pointing elements. The first category covers elements
with hardware buttons that post distinct codes per key
press (e.g., dashboard buttons), but also composite
systems that process input streams and produce high-
level command (e.g., speech recognition). The sec-
ond category abstracts over physical pointing meth-
ods like relative or absolute pointing (e.g. touch).
Support for multimodality is based on an archi-
tectural split between virtual input, i.e. at the level of
the HMI element interface, and physical input, i.e. at
the level of the physical input device, again wrapped
as an HMI element plugin. Each HMI input element
interface abstracts over multiple physical input ele-
ments of its category and operates as a high-level in-
put channel triggering interaction commands, while
physical input plugins map device commands to in-
teraction commands. Application logic handles input
at the interaction command level, is independent from
physical elements and supports any vehicle setup.
Input modality selection is also subject to change
based on the personalisation and adaptation logic. For
example, voice commands would be preferred over
dashboard buttons when driving at high speed. On
the contrary, voice recognition would be restricted in
a loud environment so as to reduce recognition errors.
3.3 GUI Personalisation
Personalising GUI applications typically involves de-
veloping dedicated interface screens and associated
interaction on top of the typical GUI. This supports
personalisation at any level of granularity, but en-
tails extra development effort, and may lead to code
replication as well as tight-coupling of application
logic with personalisation logic. For many GUI ap-
plications, a more course-grained personalisation ap-
proach that supports specific GUI elements and spe-
cific forms of personalisation, is often sufficient.
In this context, the proposed framework features a
GUI toolkit of adaptive and personalisable user con-
trols to be used in GUI application development. The
toolkit integrates personalisation capabilities and ab-
stracts these features from developers, enabling easier
integration and robust rapid prototyping.
3.3.1 GUI Toolkit User Controls
The GUI toolkit features custom user controls (wid-
gets) that extend their native counterparts with per-
sonalisation support, including both low-level (e.g.,
labels, buttons, checkboxes, etc.) and high-level (e.g.,
tab groups, list views) widgets. Both user control cat-
egories maintain the native user control interface so
that once instantiated (via code or visual designer),
the user control can then be used instead of its native
counterpart in GUI development code.
A Framework for Personalised HMI Interaction in ADAS Systems
589

Figure 2: Alternative menu incarnations; default style (left), for computer experts (middle), for visually impaired users (right).
Low-level widgets are typically personalised in
terms of visual style aspects such as fonts and colours.
Supporting specific styles for particular widgets, or
widgets collections is achieved in a way similar to
CSS styling, i.e. assigning ids or classes to wid-
gets to allow matching them against personalisation
rules. High-level widgets are designed and devel-
oped based on notion of adaptive component hierar-
chies. Abstract user interface tasks are hierarchically
decomposed to sub-tasks, which at the lowest level
are matched by physical interface designs. Multiple
physical designs are available per task, allowing for
a polymorphic matching process that yields the best
combination of physical designs based on the per-
sonalisation parameters. Technically, an abstract GUI
control is used that is instantiated at runtime through
a factory method to produce the concrete personalised
GUI control. For example, Figure 2 shows alternative
incarnations of a personalised menu widget.
The toolkit is extensible, allowing to introduce
custom, application specific user controls building on
top of the native ones. The toolkit facilitates the de-
velopment of such widgets also as task-based adap-
tive component hierarchies, guiding the developer to
introduce application specific tasks and develop the
alternative matching physical interfaces.
3.3.2 Personalising User Controls
Personalisation of user controls is achieved through
the Personalisation Server and the Personalisation
Client. The former operates as a server within the cen-
tral Personalised HMI Controller, while the latter is
automatically included by the toolkit within each GUI
application that maintains a list of all GUI toolkit user
controls instantiated in the application. Upon launch-
ing the GUI application, the Personalisation Client
registers itself to the Personalisation Server to be no-
tified about any personalisation decisions. When no-
tified, the Personalisation Client propagates these de-
cisions to each user control by invoking their custom
personalisation interface, styling them as needed and
triggering the appropriate physical interfaces to match
active tasks. This is done transparently and involves
no developer effort.
3.4 Rule Engine for Triggering
Personalisation Behaviour
The central component of the framework is a rule
engine that uses a set of personalisation and adapta-
tion rules provided by domain experts, i.e. driver be-
haviour and HMI experts. The rules are specified in
ACTA (Zidianakis et al., 2017), a general purpose fi-
nite state machine description language that supports
event-driven sequential logic as well as rule-driven
workflows. The specified rules are evaluated accord-
ing to the current input data to produce HMI activa-
tion decisions, handled by the HMI modality selection
component, as well as GUI personalisation decisions,
propagated by the GUI Personalisation Server to all
GUI applications running in the vehicle.
As mentioned, interaction is initiated by the DSS,
with each request handled by the Personalised HMI
framework by directly triggering corresponding rules,
thus following a well-defined interface dictated by the
interaction strategies. The scheme is flexible enough
to also support finer-grained interaction including per-
sonalising the start-up process (e.g., put on the news
or music), selecting the destination and the preferable
route (e.g., based on history), or stopping at a gas sta-
tion (e.g., based on route proximity).
4 CASE STUDIES
4.1 Simulated Car Environment
This case study was selected as it enabled experiment-
ing with a wide variety of HMI elements (developed
as software plugins) without involving any hardware
integration issues. The HMI elements included: (i)
a central stack screen; (ii) a head-up display (HUD);
(iii) a LED strip; (iv) an audio system; (v) a steering
wheel with vibration; and (vi) a seat with vibration.
Many personalisation and adaptation parameters
were considered covering driver preferences (e.g.,
GUI visual styles), experience (e.g., driving or com-
puter experience), disabilities (e.g., low vision, hear-
ing impaired), current state (e.g., sleepy, distracted)
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
590
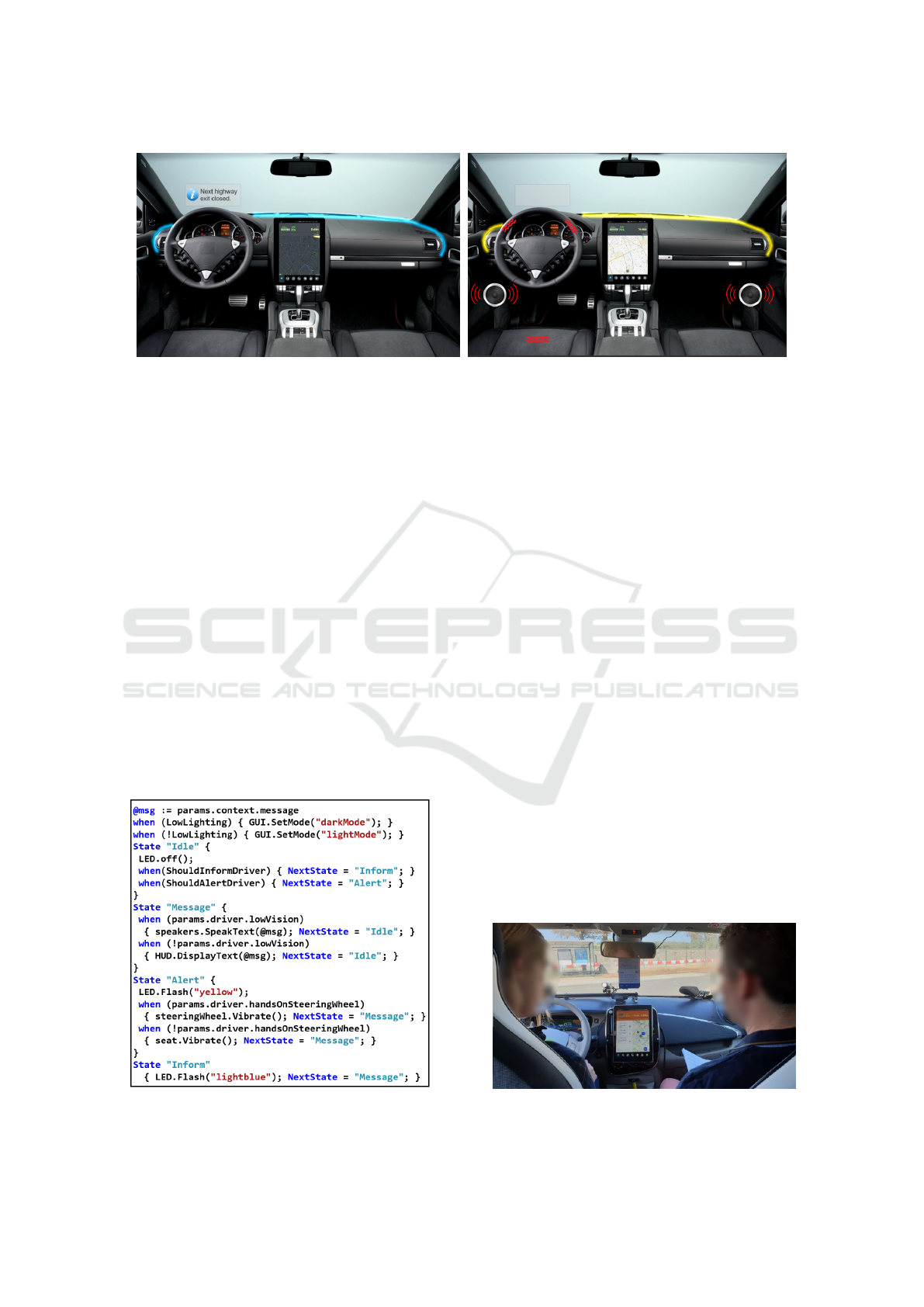
Figure 3: Examples of personalised and adapted HMI interaction; issuing an information message for a typical driver in low
lighting conditions (left), issuing a warning message for a visually impaired driver in normal conditions (right).
and state history (e.g., usually sleepy), as well as driv-
ing context (e.g., current speed, automated or manual
driving) and environment (e.g., environment noise, vi-
sual conditions). Based on these parameters, a set
of rules was defined and developed to trigger person-
alised HMI interaction. Figure 4 shows an excerpt of
these rules, while Figure 3 presents examples of the
respective HMI interaction realised for specific pa-
rameter combinations. As shown, information mes-
sages are associated with a blue flashing colour on the
LED. Driver alerts instead use a yellow LED colour,
accompanied by a vibration either on the steering
wheel, if the driver’s hands are on it, or the seat other-
wise. Both information messages and alerts also issue
a message to be presented to the driver. This is further
personalised considering driver disabilities; for a typi-
cal driver the message is presented on the HUD, while
for a low vision driver spoken text is used instead. The
rule excerpt also covers a case of GUI personalisation
that takes into account the lighting conditions to ap-
propriately activate a dark or a light visual mode.
Figure 4: Excerpt of personalisation and adaptation rules
for case study 1, matching the interaction of Figure 3.
Overall, the framework was quite effective in sup-
porting personalised HMI. It achieved decoupling of
personalisation logic from application code and pro-
moted a clear interface between realising DSS inter-
action strategies and triggering HMI elements. The
rule language also enabled non-technical HMI experts
to contribute in the development process and facili-
tated the prototyping of personalised interaction.
4.2 Electric Car
The personalised HMI framework has been deployed
and integrated in Use Case B of ADAS&ME (Figure
5), which aims to mitigate range anxiety in electric ve-
hicles. The HMI elements in this case study consisted
of: (i) a central stack screen; (ii) an audio system;
and (iii) a pair of A-pillar LED strips. Again, various
parameters were considered to derive the personalisa-
tion and adaptation rules, with focus on accessibility
issues (e.g. colour blindness, low vision, auditory im-
pairments, etc.). Parameters also included driver char-
acteristics such as language, preferences and experi-
ence, driver state, (i.e. anxiety), driving context (e.g.,
low battery) and environment (e.g., low lighting).
Since the central stack screen was the main HMI
element of the case study, particular focus was put on
GUI personalisation and adaptation. Many interface
screens were personalised with Figure 7 illustrating
Figure 5: Integration of the personalised HMI framework
and the central stack GUI application in an electric vehicle.
A Framework for Personalised HMI Interaction in ADAS Systems
591

Figure 6: GUI personalisation and adaptation examples: changing visual styles (left), layout and presentation (right ).
Figure 7: HMI modality personalisation and adaptation examples: adaptation for range anxiety (left); personalised interface
and notification for inexperienced electric vehicle driver with motor impairments (middle left); adaptive interface suggestions
based on electric vehicle range (middle right); personalised input controls based on recent/frequent driver destinations (right).
two indicative examples. The first one (left) shows
the personalisation of visual styles such as colours,
styles and fonts, used extensively for accessibility is-
sues and driver preferences. The second one (right)
shows the adaptation of layout and presentation for
elderly drivers, drivers with low vision or drivers with
high cognitive load. As shown, the joint task of select-
ing and reviewing the route is split into two separate
tasks, each performed in a different screen so as to
focus only on the specific task information, and allow
presenting it with a larger font-size and clearer layout,
facilitating interaction for the target driver groups.
This category of adaptations was realised by intro-
ducing application specific tasks and developing the
alternative physical interfaces matching the tasks. Fi-
nally, the middle left part of Figure 6 also presents
a visual style adaptation for drivers with mild motor
impairments that maximizes the effective touch area.
The central stack screen was also used as an in-
put and output modality, featuring also HMI modality
personalisation and adaptation examples, as shown in
Figure 6. When the driver is detected to have range
anxiety the HMI shows the expected and actual con-
sumption to calm the driver (Figure 6, left). Then,
notifications with electric vehicle information (e.g.,
slow down to recover battery) are presented for in-
experienced drivers (Figure 6, middle left). Adaptive
interface suggestions are also provided based on elec-
tric vehicle range, e.g., to suggest going to the closest
charging station when battery level is too low (Figure
6, middle right). Finally, personalised input controls
are used for destination selection based on drivers’ re-
cent or frequent destinations (Figure 6, right). HMI
modality personalisation examples were not limited
to the central stack screen; louder sounds were also
used for drivers with hearing disabilities, while vary-
ing colours and patterns were adopted in the LED
strips to convey driving context information.
Again, the framework proved to be very effective,
especially in GUI personalisation. Personalisation for
common UI controls such as round or square buttons,
or changes in text size, were specified only once based
on GUI toolkit styling and didn’t involve repeated
effort despite occurring across different screens. In
order to personalise application-specific GUI parts
(e.g., route selection) some development was natu-
rally required, as would also have been without the
framework. Nevertheless, the structured approach of
the GUI toolkit for specifying tasks and developing
the matching interfaces clearly separated original and
adapted interface code from interaction code, facili-
tating code organisation. It also promoted reusability,
enabling to reuse the widget in different aspects of the
application or even across applications.
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
592

5 CONCLUSIONS
This paper presented a framework for personalised in-
teraction in ADAS systems, taking into account the
driver profile and state as well as the situational and
environmental context. The framework relies on a
rule engine that uses a customisable and extensible
set of personalisation and adaptation rules to produce
the decisions for selecting the most appropriate HMI
elements and personalising GUI applications.
Personalised HMI modality selection is realised
by taking into account all input and output modalities
of the vehicle, classifying them into categories asso-
ciated with HMI element interfaces and maintaining
bindings for their activation. Multimodal input is also
supported by separating virtual input and the related
application interaction commands from physical in-
put, and by allowing to connect multiple physical in-
put devices to each HMI element interface.
GUI application personalisation is achieved
through an extensible GUI toolkit of adaptive and per-
sonalisable user controls that is offered by the frame-
work to be employed in the development of applica-
tions requiring personalisation features. The toolkit
integrates personalisation and adaptation capabilities
thus abstracting these features from developers of
software for automotive applications.
The framework has been developed and adopted
in two case studies to validate its applicability. As
the ADAS&ME project progresses, the framework
will be further integrated in demonstrator vehicles and
eventually evaluated in the project pilot sites along
with the HMI interaction and its personalisation and
adaptation features. Future work includes the explo-
ration of a machine learning approach for triggering
HMI personalisation that also considers driver feed-
back and responses to prior system actions.
ACKNOWLEDGEMENTS
This project has received funding from the Euro-
pean Union’s Horizon 2020 research and innova-
tion programme under grant agreement No. 688900
(ADAS&ME). The original design for the HMI of
Use Case B of ADAS&ME was conducted by Valeo.
REFERENCES
Amditis, A., Bekiaris, E., Montanari, R., Baligand, B.,
et al. (2001). An innovative in-vehicle multimedia
HMI based on an intelligent information manager ap-
proach: the Comunicar design process. In 8th World
Congress on Intelligent Transport Systems.
Brouwer, R. F., Hoedemaeker, M., and Neerincx, M. A.
(2009). Adaptive interfaces in driving. In FAC 2009,
pages 13–19. Springer Berlin Heidelberg.
Craig, J. (2012). Map Data for ADAS. In Handbook of
Intelligent Vehicles, pages 881–892. Springer London.
Fischer, P. and N
¨
urnberger, A. (2010). myCOMAND au-
tomotive user interface: Personalized interaction with
multimedia content based on fuzzy preference model-
ing. In UMAP 2010, pages 315–326.
Garzon, S. and Poguntke, M. (2011). The personal adap-
tive in-car HMI: integration of external applications
for personalized use. In UMAP 2012, pages 35–46.
Garzon, S. R. (2012). Intelligent In-Car-Infotainment Sys-
tems: A Contextual Personalized Approach. In IE
2012, pages 315–318.
Hassel, L. and Hagen, E. (2006). Adaptation of an automo-
tive dialogue system to users’ expertise and evaluation
of the system. Language resources and evaluation,
40(1):67–85.
H
´
el
´
ene, T. V., Thierry, B., et al. (2005). Development
of a driver situation assessment module in the AIDE
project. IFAC Proceedings Volumes, 38(1):97–102.
Knauss, A., Diederichs, F., Wilbrink, M., et al. (2018).
An HMI Framework for Driver/Rider States Adaptive
Transition and ADAS. In 25th ITS World Congress.
Lee, J. D., Hoffman, J. D., and Hayes, E. (2004). Collision
warning design to mitigate driver distraction. In CHI
2004, pages 65–72. ACM.
Lilis, Y., Zidianakis, E., Partarakis, N., Antona, M., and
Stephanidis, C. (2017). Personalizing HMI Elements
in ADAS Using Ontology Meta-Models and Rule
Based Reasoning. In UAHCI 2017, pages 383–401.
Lu, M., Wevers, K., and Van Der Heijden, R. (2005). Tech-
nical feasibility of advanced driver assistance systems
(ADAS) for road traffic safety. Transportation Plan-
ning and Technology, 28(3):167–187.
Mueller, M. (2014). Deficiency drive. Vision Zero Interna-
tional.
Piao, J. and McDonald, M. (2008). Advanced driver as-
sistance systems from autonomous to cooperative ap-
proach. Transport Reviews, 28(5):659–684.
Recarte, M. A. and Nunes, L. M. (2008). Mental work-
load while driving: effects on visual search, discrimi-
nation, and decision making. Journal of experimental
psychology: Applied, 9(2):119.
Tigadi, A., Gujanatti, R., and Gonchi, A. (2016). Ad-
vanced Driver Assistance Systems. International
Journal of Engineering Research and General Sci-
ence, 4(3):2091–2730.
Tonnis, M., Lange, C., and Klinker, G. (2007). Visual Lon-
gitudinal and Lateral Driving Assistance in the Head-
Up Display of Cars. In ISMAR 2007, pages 91–94.
Werner, K. (2018). Five Short Display Stories from CES
2018. Information Display, 34(2):28–34.
Zidianakis, E., Antona, M., and Stephanidis, C. (2017).
ACTA: A general purpose Finite State Machine
(FSM) description language for smart game design.
In IHCI 2017, pages 143–150. IADIS Press.
A Framework for Personalised HMI Interaction in ADAS Systems
593
